RANCANGAN SISTEM KENDALI SUHU DAN KELEMBABAN
PADA ALAT PEMBANGKIT UDARA TERKENDALI UNTUK
PERCOBAAN PENGERINGAN BIJI-BIJIAN
RIZKY WIRADINATA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Rancangan Sistem Kendali Suhu dan Kelembaban pada Alat Pembangkit Udara Terkendali untuk Percobaan Pengeringan Biji-bijian adalah benar karya saya dengan arahan dari dosen pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
RIZKY WIRADINATA. Rancangan Sistem Kendali Suhu dan Kelembaban pada Alat Pembangkit Udara Terkendali untuk Percobaan Pengeringan Biji-bijian. Dibimbing oleh I DEWA MADE SUBRATA dan LEOPOLD OSCAR NELWAN.
Keadaan Suhu dan kelembaban dalam pengeringan biji-bijian secara mekanis sangat penting untuk dikendalikan. Alat pembangkit udara yang dirancang mampu menaikan atau menurunkan suhu dan kelembaban serta menjaganya dengan konstan. Alat pembangkit udara ini menggunakan pemanas udara, pemanas air, dan Air Conditioner (AC). Suhu dan kelembaban diatur secara otomatis (oleh sistem kendali) pada nilai set poin tertentu yang dimasukan melalui keypad, sehingga alat ini disebut dengan Pembangkit Udara Terkendali. Pada penelitian ini digunakan algoritma pengendalian yaitu algoritma ON maksimum dan ON minimum (dua level daya) dan tujuh level daya yang ditentukan berdasarkan Try and Error. Data yang didapatkan pada pengujian dengan algoritma tujuh level daya dengan kecepatan angin yang stabil yaitu 5.57 m/s memiliki fluktuasi suhu dan kelembaban yang relatif kecil yaitu 0.4 dan 0.7 %, sedangkan pada dua level daya memiliki fluktuasi suhu dan kelembaban sebesar 1.2 dan 1.8 %. Algoritma pengendalian tujuh level daya lebih dapat mempertahankan suhu dan kelembaban dari pada dua level daya. Namun pada algoritma tujuh level daya ini suhu dan kelembaban tidak dapat dinaikan atau diturunkan tepat pada set poin sehingga eror yang terjadi relatif besar yaitu 0.5 untuk suhu dan 3 % untuk kelembaban.
Kata kunci: pembangkit udara, sistem kontrol otomatis, suhu, kelembaban, gabah
ABSTRACT
RIZKY WIRADINATA. Design Control System of Temperature and Relative Humidity on Controlled Air Generator for Drying Experiment of Grain. Supervised by I DEWA MADE SUBRATA and LEOPOLD OSCAR NELWAN.
Temperature and humidity condition in the mechanical drying of grain are very important to be controlled. The air generator that has been designed can be used to increase and decrease the temperature and humidity and make them stable at required value. This air generator consists of air heater, water heater and air conditioner. This system is called Controllable Air Generator because temperature and humidity of the flowing air can be adjusted automatically (by controlling system) to the set point value that was inputted through keypad. There are two control algorithms were used in this research i.e. ‘ON maks and ON min’ (only use two power levels) and seven power levels. The data obtained by testing the seven power level algorithm in steady wind speed at 5.57 m/s show that temperature and humidity fluctuation are relatively small at 0.4 and 0.7 %, meanwhile at two level power testing the fluctuation of temperature and humidity are 1.2 and 1.8 %. The seven power levels algorithm has been able to keep temperature and humidity more stable than two level power levels algorithm. But in seven power levels algorithm temperature and humidity can not be raised and lowered right at set points. Error of this algorithm was relatively large, they were 0.5 for temperature and 3 % for humidity.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
RANCANGAN SISTEM KENDALI SUHU DAN KELEMBABAN
PADA ALAT PEMBANGKIT UDARA TERKENDALI UNTUK
PERCOBAAN PENGERINGAN BIJI-BIJIAN
RIZKY WIRADINATA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
Judul Skripsi : Rancangan Sistem Kendali Suhu dan Kelembaban pada Alat Pembangkit Udara Terkendali untuk Percobaan Pengeringan Biji-bijian
Nama : Rizky Wiradinata NIM : F14100055
Disetujui oleh
Dr.Ir. I Dewa Made Subrata M. Agr Pembimbing I
Dr. Leopold Oscar Nelwan, S.Tp M.Si Pembimbing II
Diketahui oleh
Dr Ir Desrial, M.Eng Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Januari 2014 ini ialah kontrol otomatis, dengan judul Rancangan Sistem Kendali Suhu dan Kelembaban pada Alat Pembangkit Udara Terkendali Untuk Percobaan Pengeringan Biji-bijian. Penelitian ini didanai oleh program KKP3N dengan nomer kontrak 54/PL.220/I.1/3/2014.
Terima kasih penulis ucapkan kepada Bapak Dr.Ir. I Dewa Made Subrata M. Agr dan Bapak Dr. Leopold Oscar Nelwan, S.Tp M.Si selaku pembimbing. Di samping itu, penghargaan penulis sampaikan kepada Dwi Budi Aswin, ST yang telah membantu selama pengumpulan data dan pembuatan gambar teknik. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
DAFTAR TABEL viii
DAFTAR GAMBAR viii
DAFTAR LAMPIRAN viii
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 1
Tujuan Penelitian 2
METODE 2
Waktu dan Tempat 2
Bahan 2
Alat 2
Perancangan Sistem Kendali pada Alat Pembangkit Udara 2
Prosedur Penelitian 9
Pengambilan Data 9
HASIL DAN PEMBAHASAN 10
Kalibrasi Sensor 11
SIMPULAN DAN SARAN 26
Simpulan 26
Saran 26
DAFTAR PUSTAKA 26
Riwayat Hidup 35
LAMPIRAN 28
DAFTAR TABEL
1 Level daya, daya dan suhu yang dapat dicapai 15
2 Level daya, daya dan kelembaban 21
DAFTAR GAMBAR
1 Diagram alir pengendalian pemanas udara, pemanas air dan AC 4 2 (a) Mikrokontroler AVR ATmega8535 ; (b) Pin configuration AVR
ATmega8535 6
3 Sensor SHT11 6
4 Diagram blok pengendalian suhu dan kelembaban 7
5 Contoh Pseudocode pemograman 8
6 (a) alat pembangkit udara ; (b) sistem kendali suhu dan kelembaban 11 7 Hubungan suhu sensor SHT11 dan termometer standar 12 8 Hubungan kelembaban sensor SHT11 dan kelembaban hasil kalkulasi
termometer bola basah dan bola kering. 12
9 Grafik validasi sensor suhu SHT11 13
10 Grafik validasi sensor kelembaban SHT11 14
11 Perbandingan pengendalian suhu dan kelembaban pada dua level daya
perlakuan pertama 14
12 Fluktuasi suhu dan level daya pada set poin 47 perlakuan pertama 16 13 Fluktuasi suhu dan level daya pada set poin 31 perlakuan pertama 16 14 Fluktuasi suhu dan level daya pada set poin 31 perlakuan kedua 17 15 Fluktuasi suhu dan level daya pada set poin 47 perlakuan kedua 18 16 Suhu sistem kendali, set point 40 dan level daya perlakuan kedua 19 17 Hubungan H, H dan level daya perlakuan pertama set poin 47 21 18 Hubungan H, H dan level daya perlakuan kedua set poin 47 22 19 Hubungan H, H dan level daya perlakuan pertama set poin 31 22 20 Hubungan H, H dan level daya perlakuan kedua set poin 31 23 21 Hubungan kelembaban dan H perlakuan pertama set poin 42%, 31 24 22 Hubungan kelembaban dan H perlakuan kedua set poin 42%, 31 24 23 Hubungan kelembaban dan H perlakuan pertama set poin 36%, 47 24 24 Hubungan kelembaban dan H perlakuan kedua set poin 36%, 47 25
DAFTAR LAMPIRAN
1 Gambar alat pembangkit udara 28
2 Gambar teknik alat pembangkit udara 29
3 Rangkaian Zero Crossing 30
4 Rangkaian Buffer 31
5 Rangkain catu daya 32
6 Diagram alir penelitian 33
7 Perbedaan algoritme 34
PENDAHULUAN
Latar Belakang
Pengeringan biji-biji secara tradisional atau penjemuran memiliki banyak kendala antara lain cuaca yang tidak menentu, terjadi kehilangan yang besar karena tercecer, dan membutuhkan lahan yang luas, sehingga diperlukan metode pengeringan secara mekanis atau menggunakan alat pengering. Alat pengering biji-bijian khususnya gabah bekerja dengan menghembuskan udara bersuhu tinggi ke penampung gabah. Udara bersuhu tinggi menyebabkan terjadinya perpindahan kalor. Proses perpindahan kalor terjadi karena suhu bahan lebih rendah dari pada suhu udara pengering yang dialirkan di sekitarnya. Udara panas yang dialirkan ini akan meningkatkan suhu bahan dan menyebabkan tekanan uap air bahan menjadi lebih tinggi dari pada tekanan uap air di udara sekitarnya, sehingga terjadi perpindahan massa uap air dari bahan ke udara (Syaiful dan Hargana 2009). Perpindahan uap air dari bahan ke udara tersebut akan menurunkan kadar air bahan. Pada umumnya, pengering gabah yang digunakan di Indonesia adalah tipe bak pengering. Alat pengering tipe bak atau tumpukan ini dapat mengeringkan gabah dengan kapasitas yang besar, tetapi kehilangan tekanan yang terjadi relatif besar dan diperlukan laju aliran udara yang memadai.
Pengeringan biji-bijian khususnya gabah secara tumpukan memerlukan suatu alat pengering dengan suhu dan kelembaban udara yang dapat dikendalikan untuk mengatasi kehilangan tekanan yang besar, dengan laju aliran udara yang memadai. Laju aliran udara yang diperlukan untuk mengatasi kehilangan tekanan pada pengeringan tipe bak relatif besar, sehingga sulit untuk menjaga kestabilan suhu dan kelembaban..
Perumusan Masalah
Tujuan Penelitian
Penelitian ini bertujuan untuk merancang dan membuat sistem kendali suhu dan kelembaban pada alat pembangkit udara untuk percobaan pengeringan biji-bijian khususnya gabah, serta melakukan pengujian kinerja sistem kendali pada alat pembangkit udara yang telah dibuat.
METODE
Waktu dan Tempat
Penelitian ini dilaksanakan di Labolatorium Lapangan Siswadhi Soepardjo dan di Labolatorium Instrumentasi dan Kontrol Fakultas Teknologi Pertanian IPB. Penelitian dilaksanakan pada bulan Januari 2014 sampai dengan bulan Januari 2015.
Bahan
Bahan yang digunakan untuk membuat pembangkit udara adalah blower sentrifugal, pipa fleksibel, pipa besi, plat besi, besi siku, Air Conditioner (AC), katub, elemen pemanas air dan elemen pemanas udara. Bahan yang digunakan untuk membuat rangkaian sistem kendali yaitu mikrokontroler, sensor, keypad, LCD dan komponen elektronika lain yang dibutuhkan untuk membuat rangkaian aktuator dan rangkaian catu daya.
Alat
Alat yang digunakan untuk membuat perangkat lunak sistem kendali adalah seperangkat komputer yang telah diinstal program CodeVision AVR 2.05.0 dan Proteus 7.10 SP0. Alat yang digunakan untuk membuat rangkaian aktuator dan rangkaian catu daya antara lain mutimeter, wattmeter, soldering, soldering attractor, tang jepit dan tang potong. Alat yang digunakan untuk membuat pembangkit udara adalah las listrik, pemotong plat besi, gergaji besi, plastic cutter dan obeng. Alat yang digunakan untuk kalibrasi sensor adalah model pindah panas konveksi yang terbuat dari pemanas udara, kipas dan catu daya. Selain itu dibutuhkan alat untuk mengolah data dalam bentuk grafik yaitu Microsoft Excel 2010.
Perancangan Sistem Kendali pada Alat Pembangkit Udara
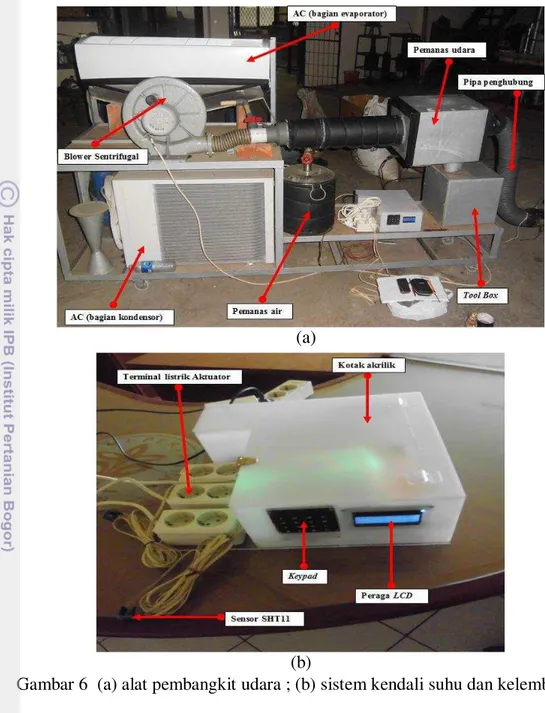
Rangkaian alat pembangkit udara dengan suhu dan kelembaban terkendali mempunyai dua unit utama yaitu unit mekanik dan unit pengendali. Unit mekanik adalah alat pembangkit udara sedangkan unit pengendali adalah sistem kendali suhu dan kelembaban. Alat pembangkit udara yang digunakan untuk penelitian ini telah tersedia di Labolatorium Pascapanen FATETA IPB (Nelwan et al. 2013).
1.75 cm dan panjang 45 cm. Elemen pemanas yang digunakan pada pemanas udara sebanyak lima buah, masing-masing elemen pemanas membutuhkan daya maksimal sebesar 600 W dan dilengkapi dengan sirip-sirip logam untuk mempermudah dalam perpindahan panas. Pemanas air berfungsi untuk menaikan kelembaban udara dengan cara menghembuskan uap air. Pemanas air yang digunakan bertipe Storage - Electric Water Heater. Air ditampung dalam sebuah tangki terisolasi yang dilengkapi dengan pipa berelemen pemanas listrik (Water Heating) yang melingkar. Pemanas air yang digunakan berdiameter 30 cm , tinggi 31 cm dan mampu menampung air sebanyak 22 liter. Pemanas air ini menggunakan 1 Water Heating yang terbuat dari kawat dengan kandungan 80% nikelin dan 20% krom yang dilapisi oleh bahan Food Grade dengan diameter 0.65 cm dan panjang 36 cm. Uap air yang dikeluarkan oleh pemanas udara disalurkan langsung ke bagian pencampur udara (Lampiran 1) dan mampu menaikan kelembaban hingga 96%. Untuk menjaga tekanan uap air yang dihasilkan oleh pemanas air, maka pemanas air yang digunakan dilengkapi dengan katub. Daya maksimal yang digunakan oleh pemanas air sebesar 1000 W.
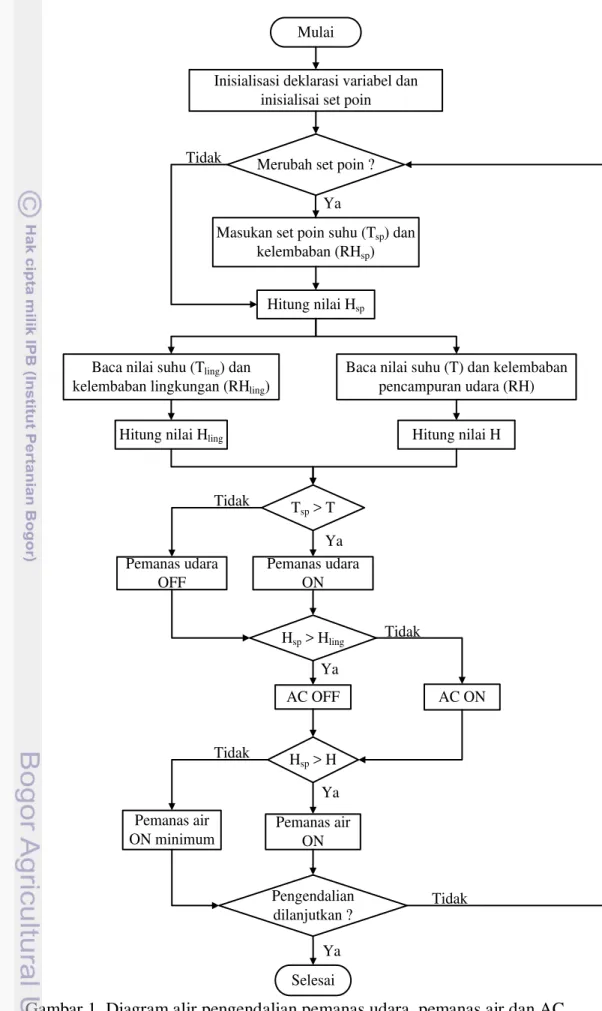
Sedangkan AC berfungsi untuk menurunkan kelembaban bila kelembaban yang dihasilkan oleh pemanas air terlalu tinggi. AC yang digunakan adalah AC jenis Split Wall dengan daya 1.5 PK atau 1170 W dengan ukuran panjang 102 cm, lebar 25 cm dan tinggi 32 cm. AC jenis ini mampu menurunkan kelembaban udara hingga 37.8% pada kecepatan udara 5.57 m/s. Diagram alir pengendalian pemanas udara, pemanas air dan AC ditunjukan pada Gambar 1.
Komponen selanjutnya adalah blower sentrifugal yang digunakan untuk memberikan aliran udara dengan kecepatan konstan. Blower sentrifugal membutuhkan daya sebesar 370 W. Udara yang dihembuskan oleh blower sentrifugal selanjutnya disalurkan ke pemanas air dan pemanas udara (Lampiran 1) melalui pipa. Pipa yang digunakan adalah pipa fleksibel 4 inci karena memudahkan saat pemasangan. Pipa fleksibel juga digunakan untuk menyambungkan alat pembangkit udara dengan bak penampung gabah. Bak penampung gabah berbentuk silinder dengan diameter 82 cm dan tinggi 91 cm. Gabah yang tertampung pada penampung gabah mempunyai tinggi permukaan 70.5 cm dari dasar penampung gabah. Keadaan tersebut menghasilkan kecepatan aliran udara dalam sistem konstan sebesar 5.57 m/s.
Mulai
Inisialisasi deklarasi variabel dan inisialisai set poin
Baca nilai suhu (Tling) dan
kelembaban lingkungan (RHling)
Baca nilai suhu (T) dan kelembaban pencampuran udara (RH)
Hitung nilai Hling Hitung nilai H
Pemanas udara
Rancangan Fungsional Sistem Kendali
AC, pemanas air dan pemanas udara dikendalikan dengan memberikan perbedaan daya. Perbedaan daya tersebut dikendalikan oleh sistem kendali dengan algoritma yang telah diatur sedemikian rupa. Aktuator pada sistem ini dikendalikan menggunakan rangkaian Zero Crossing. Dengan menerapkan prinsip peredaman pada saat terjadinya Zero Crossing maka daya yang diberikan pada AC, pemanas air dan pemanas udara dapat diatur. Perbedaan daya tersebut disebut dengan level daya aktuator. Sistem kendali otomatis membutuhkan komponen utama berupa mikrokontroler, sensor suhu dan kelembaban udara, keypad, peraga LCD dan komponen elektronika lain penyusun rangkaian Zero Crossing. Set poin suhu dan kelembaban dimasukkan dengan menekan keypad, selanjutnya sensor suhu dan kelembaban udara akan melakukan pengukuran suhu dan kelembaban yang terjadi. Hasil pengukuran sensor tersebut dikirim ke mikrokontroler. Mikrokontroler akan memberikan perintah kepada rangkaian Zero Crossing untuk bekerja dengan memberikan daya yang berbeda kepada pemanas udara, pemanas air dan AC hingga keadaan suhu dan kelembaban sama dengan set poin yang dimasukan. Suhu dan kelembaban lingkungan serta pembangkit udara akan ditampilkan pada peraga LCD.
Rancangan Struktural Sistem Kendali
Sistem kendali ini tersusun dari dua bagian utama yaitu sistem antar muka pengguna (human interface) dan sistem pengendali (Sajuri 2013). Human interface terdiri dari komponen keypad dan LCD monitor. Pengguna dapat memasukkan set poin dengan menggunakan keypad dan dapat mengetahui informasi atau respon yang diberikan oleh mikrokontroler melalui LCD monitor. Keypad yang digunakan adalah keypad matriks 4 x 4 jenis membran karena relatif murah bila dibandingkan dengan jenis fiber dan mudah ditemui dipasaran. Sedangkan jenis LCD yang digunakan adalah dot matrix LCD 16 x 4, jenis LCD tersebut dipilih karena mampu menampilkan informasi yang diinginkan dan harganya terjangkau.
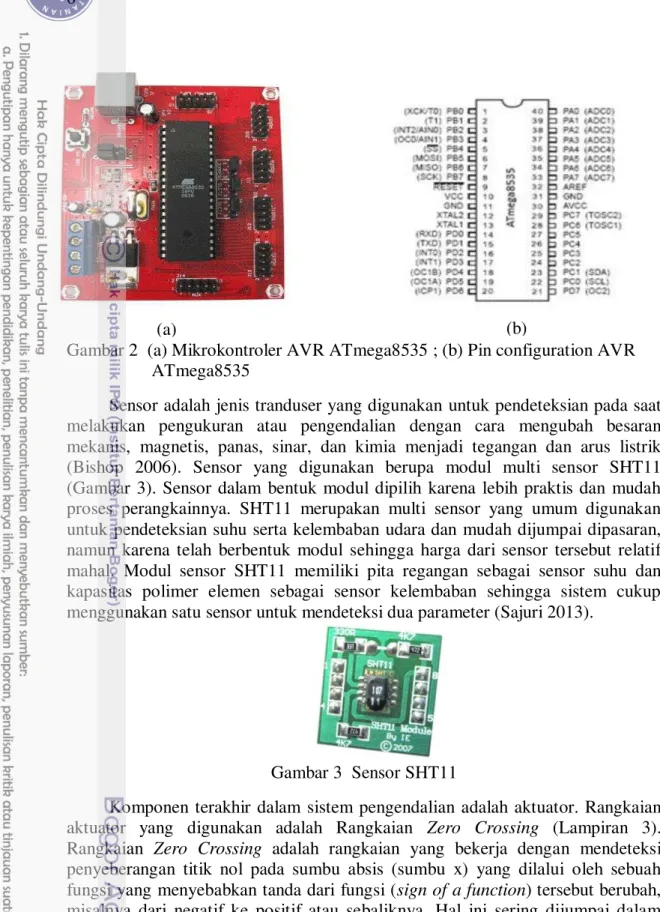
Gambar 2 (a) Mikrokontroler AVR ATmega8535 ; (b) Pin configuration AVR ATmega8535
Sensor adalah jenis tranduser yang digunakan untuk pendeteksian pada saat melakukan pengukuran atau pengendalian dengan cara mengubah besaran mekanis, magnetis, panas, sinar, dan kimia menjadi tegangan dan arus listrik (Bishop 2006). Sensor yang digunakan berupa modul multi sensor SHT11 (Gambar 3). Sensor dalam bentuk modul dipilih karena lebih praktis dan mudah proses perangkainnya. SHT11 merupakan multi sensor yang umum digunakan untuk pendeteksian suhu serta kelembaban udara dan mudah dijumpai dipasaran, namun karena telah berbentuk modul sehingga harga dari sensor tersebut relatif mahal. Modul sensor SHT11 memiliki pita regangan sebagai sensor suhu dan kapasitas polimer elemen sebagai sensor kelembaban sehingga sistem cukup menggunakan satu sensor untuk mendeteksi dua parameter (Sajuri 2013).
Gambar 3 Sensor SHT11
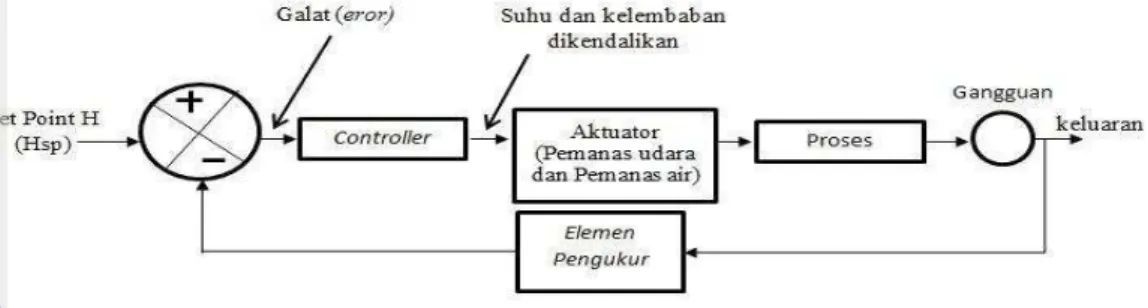
Komponen terakhir dalam sistem pengendalian adalah aktuator. Rangkaian aktuator yang digunakan adalah Rangkaian Zero Crossing (Lampiran 3). Rangkaian Zero Crossing adalah rangkaian yang bekerja dengan mendeteksi penyeberangan titik nol pada sumbu absis (sumbu x) yang dilalui oleh sebuah fungsi yang menyebabkan tanda dari fungsi (sign of a function) tersebut berubah, misalnya dari negatif ke positif atau sebaliknya. Hal ini sering dijumpai dalam aplikasi pengolahan isyarat. Isyarat-isyarat sederhana seperti sinus dan kosinus memiliki Zero Crossing (Juslam 2010). Rangkaian Zero Crossing yang digabungkan dengan rangkaian Dimmer dapat memberikan perbedaan daya. Sehingga keluaran dari aktuator yang digunakan adalah perbedaan daya yang diberikan kepada masing-masing komponen penyusun alat pembangkit udara. Diagram blok sistem kendali suhu dan kelembaban udara diperlihatkan pada Gambar 4.
a) b)
Gambar 4 Diagram blok pengendalian suhu dan kelembaban
Besaran listrik berupa tegangan dan arus listrik yang diterima oleh mikrokontroler dari sensor akan diteruskan ke aktuator. Logika yang dikirimkan ke aktuator harus sama dengan logika yang dikeluarkan oleh mikrokontroler, namun hal tersebut tidak tercapai. Logika yang diterima oleh aktuator kurang kuat sehingga apabila mikrokontoler mengeluarkan logika 1 maka yang diterima oleh aktuator adalah 0, sehingga diperlukan rangkaian yang dapat menguatkan logika keluaran dari mikrokontroler tersebut yaitu rangkaian Buffer (Lampiran 4). Rangkaian Buffer berfungsi untuk menguatkan sinyal clock yang dikeluarkan oleh mikrokontroler dan dapat pula digunakan untuk sinkronisasi sinyal agar cukup kuat untuk ditransmisikan melalui kabel dengan jarak yang cukup jauh.
Semua komponen elektronika di atas membutuhkan energi listrik untuk dapat bekerja dengan baik sehingga perlu untuk dibuat rangkaian catu daya (Lampiran 5). Mikrokontroler membutuhkan tegangan DC 9 sampai dengan 12 volt, sedangkan komponen lain (LCD, keypad, sensor dan aktuator) membutuhkan tegangan DC sebesar 5 volt. Mikrokontroler AVR ATmega8535 sudah terdapat pin catu daya (VCC dan GND) yang menghasilkan tegangan DC 5 volt disetiap port sehingga komponen yang terhubung dengan mikrokontroler dapat langsung menggunakannya tanpa harus membuat rangkaian catu daya tersendiri.
Rancangan Algoritme Pemograman
Rancangan algoritme pemograman pada mikrokontroler disebut dengan firmware. Pada penelitian ini, firmware dibuat dalam bahasa C menggunakan software CodeVisionAVR C Compiler. Firmware yang dibuat tersebut akan menentukan alur perintah yang akan dijalankan oleh mikrokontroler, sehingga akan menentukan pula alur kerja sistem secara keseluruhan. Diagram alir kerja sistem dapat dilihat pada Gambar 1.
Selain penyusunan langkah kerja, bagian dari perancangan algoritma pemograman sistem kendali adalah penyusunan rumus-rumus yang menjelaskan tentang proses perubahan suhu dan kelembaban. Rumus-rumus yang digunakan mengacu pada Psychrometric Data ASAE D271.2 DEC 94.
Sensor SHT11 membaca suhu dan kelembaban, selanjutnya suhu dikonversi terlebih dahulu menjadi nilai atau nilai tekanan uap saturasi menggunakan persamaan kedua. Kelembaban dan nilai akan dikonversi menjadi nilai atau tekanan uap dengan menggunakan persamaan ketiga. Nilai nilai selanjutnya digunakan untuk menghitung nilai H atau kelembaban mutlak. Gambar 5 menunjukkan contoh pseudocode algoritme yang digunakan untuk mekanisme pengendalian suhu dan kelembaban.
Gambar 5 Contoh Pseudocode pemograman
Dimana : , �, , , , , , adalah konstanta dengan nilai sebesar = suhu pengukuran sensor ( )
A = -27405.526 = 22105649.25 B = 97.5413 C = -0.146244 D = 0.12558 x 10-3 E = -0.48502 x 10-7 F = 4.34903 G = 0.39381 x 10-2
= tekanan uap saturasi (Pa)
atm = tekanan standart (Pa)
= suhu (Kelvin)
Prosedur yang digunakan dalam pengendalian suhu dan kelembaban ini diawali dengan mengubah nilai suhu dan kelembaban menjadi nilai kelembaban mutlak dengan simbol H (Gambar 1). Kelembaban mutlak yang menjadi parameter dalam pengukuran adalah kelembaban mutlak set poin ( H ), kelembaban mutlak lingkungan (H ) dan kelembaban mutlak pencampuran (H). Nilai H dihitung menggunakan parameter suhu dan kelembaban set poin yang dimasukan dengan komponen keypad, menghitung H dengan parameter suhu dan kelembaban lingkungan yang terbaca oleh sensor dan menghitung nilai H dengan parameter suhu dan kelembaban udara dalam sistem pembangkit udara. Apabila didapatkan nilai H lebih kecil dari pada H maka AC akan menyala. Selanjutnya nilai H dan H dibandingkan, bila nilai H lebih kecil dari pada nilai H maka AC akan menyala. Apabila salah satu persyaratan tersebut tercapai, maka AC akan menyala. Indikator penyalaan AC ditandai dengan adanya nyala lampu LED berwarna hijau.
Prosedur Penelitian
Penelitian dilaksanakan dengan mengikuti diagram alir proses penelitian (Lampiran 6). Diawali dengan mengidentifikasi masalah yang telah dijelaskan pada latar belakang. Dilanjutkan dengan perancangan dan pembuatan sistem kendali dan alat pembangkit udara. Tahap terakhir adalah pengujian kinerja sistem kendali dan alat pembangkit udara yang telah dibuat.
Pengambilan Data Kalibrasi Sensor
Kalibrasi dilakukan dengan membandingkan hasil pembacaan sensor dan pembacaan alat ukur standar. Alat ukur standar yang digunakan adalah termometer standar untuk pengukuran suhu serta termometer bola basah dan bola kering untuk pengukuran kelembaban. Kalibrasi dilakukan di dalam ruang kalibrasi sederhana yang suhu dan kelembabannya dapat diatur. Alat kalibrasi sederhana ini berbentuk silinder berongga dengan diameter 14 cm dan tinggi 16 cm yang di dalamnya terdapat pemanas udara, kipas dan catu daya. Alat ini menerapkan prinsip pindah panas konveksi. Nilai suhu dan kelembaban yang dihasilkan oleh sensor maupun alat ukur standar dicatat pada setiap perubahan yang terjadi dalam ruang kalibrasi tersebut. Data hasil pengukuran diplotkan dalam grafik untuk mendapatkan persamaan kalibrasi. Hal pertama yang harus dilakukan adalah membuat diagram pencar antara data hasil pengukuran sensor dan hasil pengukuran alat ukur. Setelah itu dibuat garis regresi dan persamaannya. Persamaan garis regresi digunakan sebagai faktor koreksi pembacaan sensor. Terakhir, dilakukan analisis korelasi dan regresi untuk mengetahui hubungan antara keduanya.
Uji Kinerja Alat Pembangkit Udara Terkendali
0.1 detik atau 100 ms. Adapun data yang ditampilkan oleh peraga LCD dan dicatat adalah suhu, kelembaban, kelembaban mutlak pembangkit udara, kelembaban mutlak set poin dan kelembaban mutlak lingkungan. Pengambilan data dilakukan pada dua perlakuan algoritme pemograman dan pada dua set poin yaitu 31 , 42% dan 47 , 36%. Kedua set poin tersebut dipilih karena pada suhu 31 dan 47 adalah suhu kritis yang memungkinan untuk dicapai oleh alat pembangkit udara yang dirancang, sedangkan set poin kelembaban tersebut dipilih karena pada kelembaban 42% dan suhu 31 nilai kelembaban mutlak yang terjadi adalah 0.012 dan pada kelembaban 36% dan suhu 47 nilai kelembaban mutlak yang terjadi adalah 0.024 , nilai kelembaban mutlak tersebut adalah kelembaban mutlak set poin atau H . Kedua nilai H tersebut adalah nilai kelembaban mutlak kritis yang memungkinkan untuk dicapai oleh alat pembangkit udara. Kelembaban mutlak set poin dibutuhkan untuk mengendalikan kelembaban udara yang dihasilkan oleh pembangkit udara. Pada H rendah (31 , 42%) AC harus dinyalakan terus menerus. Daya yang dibutuhkan untuk pembangkitan udara dengan kelembaban mutlak yang rendah sangat besar
Pengambilan data dilakukan dengan cara merekam data yang ditampilkan oleh peraga LCD dengan menggunakan alat bantu berupa kamera digital. Data yang didapat selanjutnya diolah dalam Microsoft Excel 2010 dan disajikan dalam grafik hubungan antara suhu dan level daya terhadap waktu, kelembaban relatif dan level daya terhadap waktu, serta kelembaban dan kelembaban relatif terhadap waktu. Selain dari data-data yang terbaca melalui peraga LCD tersebut, terdapat data lain yang diambil yaitu data level daya dan besar daya selama pengendalian yang disajikan dalam tabel tersendiri.
HASIL DAN PEMBAHASAN
Gambar 6 (a) alat pembangkit udara ; (b) sistem kendali suhu dan kelembaban
Kalibrasi Sensor
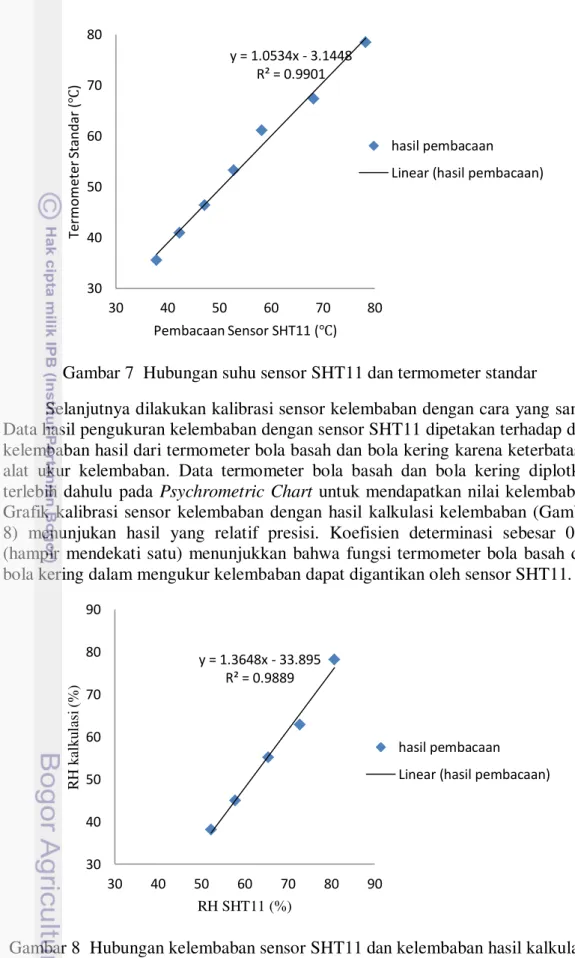
Kalibrasi sensor suhu diawali dengan pengambilan data hasil pengukuran sensor suhu SHT11 dan data hasil pengukuran termometer standar. Selanjutnya dibuat diagram pencar dengan memetakan data hasil pengukuran sensor terhadap data hasil pengukuran termometer standar. Grafik hasil kalibrasi suhu ditunjukan oleh Gambar 7. Grafik kalibrasi menunjukan hasil pengukuran sensor yang relatif tepat, karena semua titik membentuk garis linier dengan nilai koefisien determinasi sebesar 0.99 (mendekati satu) yang berarti hampir semua hasil pengukuran termometer standar bisa diwakili oleh pengukuran sensor, sehingga fungsi dari termometer dapat digantikan oleh sensor SHT11. Garis regresi menunjukan kemiringan positif dengan gradien sebesar 1.05. Hal tersebut menunjukan bila suhu yang ditunjukan oleh termometer standar naik 1.05 , maka suhu yang ditunjukan oleh sensor akan naik 1 .
(a)
Gambar 7 Hubungan suhu sensor SHT11 dan termometer standar
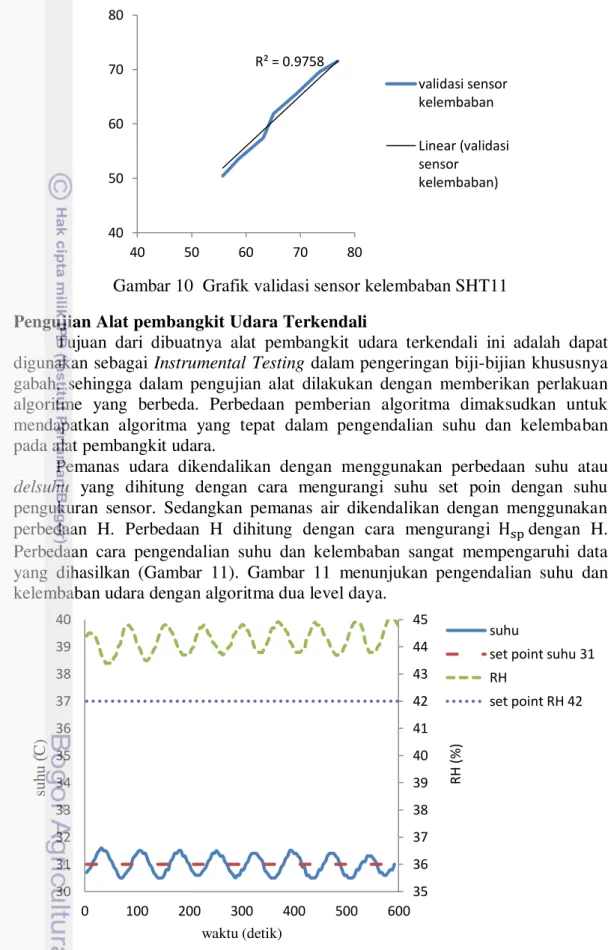
Selanjutnya dilakukan kalibrasi sensor kelembaban dengan cara yang sama. Data hasil pengukuran kelembaban dengan sensor SHT11 dipetakan terhadap data kelembaban hasil dari termometer bola basah dan bola kering karena keterbatasan alat ukur kelembaban. Data termometer bola basah dan bola kering diplotkan terlebih dahulu pada Psychrometric Chart untuk mendapatkan nilai kelembaban. Grafik kalibrasi sensor kelembaban dengan hasil kalkulasi kelembaban (Gambar 8) menunjukan hasil yang relatif presisi. Koefisien determinasi sebesar 0.99 (hampir mendekati satu) menunjukkan bahwa fungsi termometer bola basah dan bola kering dalam mengukur kelembaban dapat digantikan oleh sensor SHT11.
Gambar 8 Hubungan kelembaban sensor SHT11 dan kelembaban hasil kalkulasi termometer bola basah dan bola kering.
y = 1.0534x - 3.1448
Pembacaan Sensor SHT11 ( )
Kesesuaian hubungan kelembaban antara hasil kalkulasi termometer bola basah dan bola kering terhadap kelembaban yang ditunjukan oleh sensor SHT11 cukup baik. Garis regresi yang dihasilkan memiliki kemiringan positif dengan nilai gradien sebesar 1.36 yang berarti apabila kelembaban aktual (yang dihitung dengan termometer bola basah dan bola kering) naik 1.36%, maka nilai kelembaban yang ditunjukan oleh sensor akan naik 1%.
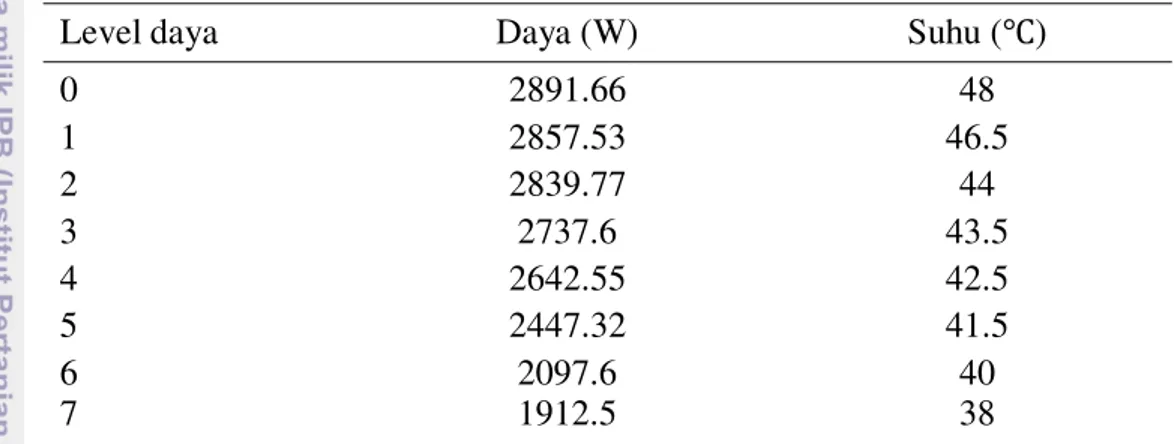
Syarat utama dalam perancangan alat ukur adalah harus mempunyai nilai presisi dan akurasi yang tinggi. Nilai presisi yang tinggi akan menjamin keterulangan hasil pengukuran, sedangkan nilai akurasi yang tinggi akan menjamin ketepatan hasil pengukuran yang didapatkan. Sensor SHT11 mampu mengukur suhu -40 hingga 120 dengan ketelitian 0.5 dan mampu mengukur kelembaban 0% hingga 100% dengan ketelitian 3.5% (Thaariq 2013). Data hasil validasi sensor, menunjukkan bahwa selisih antara pembacaan sensor dan alat ukur kalibrasi suhu adalah sebesar 1.29 , sedangkan selisih antara pembacaan sensor dan alat ukur kalibrasi kelembaban mencapai 4.64%. Dengan demikian, harus dilakukan koreksi terhadap hasil pembacaan sensor dengan menambahkan persamaan garis regresi pada grafik kalibrasi suhu dan kelembaban keprogram pembacaan sensor. Grafik hasil validasi sensor suhu dan kelembaban mempunyai kemiringan positif dengan koefisien determinasi ( ) sebesar 0.99 pada grafik validasi sensor suhu (Gambar 9) dan 0.97 grafik validasi sensor kelembaban (Gambar 10). Kemiringan grafik yang ditunjukkan oleh Gambar 9 sebesar dan Gambar 10 sebesar . Nilai tersebut mendekati kemiringan sehingga dapat dikatakan bahwa kalibrasi dilakukan cukup baik dan nilai koefisien determinasi yang mendekati 1 menandakan bahwa semua fungsi dari alat ukur suhu dan kelembaban dapat digantikan oleh sensor SHT11. Khusus untuk pembacaan kelembaban sensor SHT11 hanya dapat dilakukan pada rentang 33% hingga 80%, karena pengambilan data kalibrasi hanya dilakukan pada rentang tersebut. Pembatasan pembacaan kelembaban sensor SHT11 tersebut dilakukan karena ketika data hasil kalibrasi sensor kelembaban dilakukan set intercept pada titik 0,0 menghasilkan koefisien determinasi yang rendah.
Gambar 10 Grafik validasi sensor kelembaban SHT11
Pengujian Alat pembangkit Udara Terkendali
Tujuan dari dibuatnya alat pembangkit udara terkendali ini adalah dapat digunakan sebagai Instrumental Testing dalam pengeringan biji-bijian khususnya gabah, sehingga dalam pengujian alat dilakukan dengan memberikan perlakuan algoritme yang berbeda. Perbedaan pemberian algoritma dimaksudkan untuk mendapatkan algoritma yang tepat dalam pengendalian suhu dan kelembaban pada alat pembangkit udara.
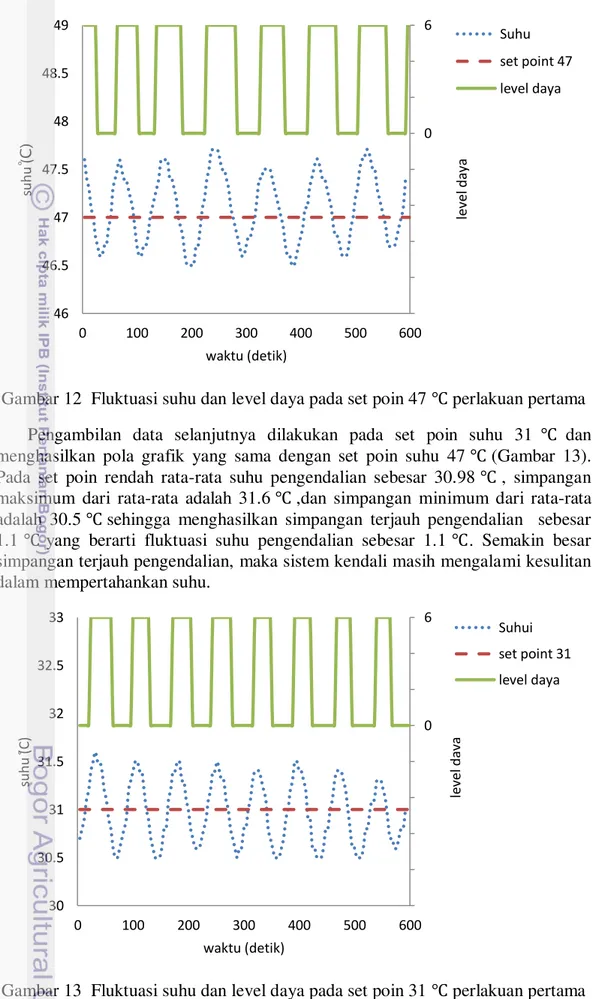
Pemanas udara dikendalikan dengan menggunakan perbedaan suhu atau delsuhu yang dihitung dengan cara mengurangi suhu set poin dengan suhu pengukuran sensor. Sedangkan pemanas air dikendalikan dengan menggunakan perbedaan H. Perbedaan H dihitung dengan cara mengurangi H dengan H. Perbedaan cara pengendalian suhu dan kelembaban sangat mempengaruhi data yang dihasilkan (Gambar 11). Gambar 11 menunjukan pengendalian suhu dan kelembaban udara dengan algoritma dua level daya.
Berdasarkan gambar di atas dapat dikatakan bahwa pengendalian suhu lebih presisi dan akurat bila dibandingkan dengan pengendalian kelembaban. Fluktuasi suhu yang terjadi berada tepat pada set poin atau di sekitar set poin, sedangkan fluktuasi kelembaban cenderung di atas set poin kelembaban. Perbedaan perlakuan algoritme pada pemanas udara dan pemanas air (Lampiran 7) terletak pada perbedaan level daya yang dieksekusi.
Pengendalian Suhu
Pengendalian suhu dilakukan dengan menggunakan pemanas udara. Sistem kendali akan memberikan level daya yang berbeda, tergantung pada keadaan suhu yang diinginkan atau set poin. Setiap level daya dari pemanas udara akan menghasilkan suhu yang berbeda-beda (Tabel 1).
Tabel 1 Level daya, daya dan suhu yang dapat dicapai
Pada perlakuan pertama, level daya yang digunakan hanya terbatas pada dua level, yaitu level nol atau daya maksimal dan level enam atau daya minimal. Sistem kendali akan memberikan daya maksimal jika suhu udara yang terbaca oleh sensor di bawah set point dan akan memberikan daya minimal bila suhu udara yang terbaca oleh sensor di atas set point sehingga akan terbentuk grafik suhu yang berfluktuasi tepat pada set point (Gambar 12). Pada set poin 47 suhu pengendalian rata-rata yang dihasilkan sebesar 47.1 , simpangan maksimum dari rata-rata adalah 47.7 dan simpangan minimum dari rata-rata adalah 46.5 . Sehingga simpangan terjauh pengendalian yang terjadi sebesar 1.2 . Simpangan terjauh pengendalian menunjukan fluktuasi suhu yang terjadi selama pengendalian suhu
Level daya Daya (W) Suhu ( )
0 2891.66 48
1 2857.53 46.5
2 2839.77 44
3 2737.6 43.5
4 2642.55 42.5
5 2447.32 41.5
6 2097.6 40
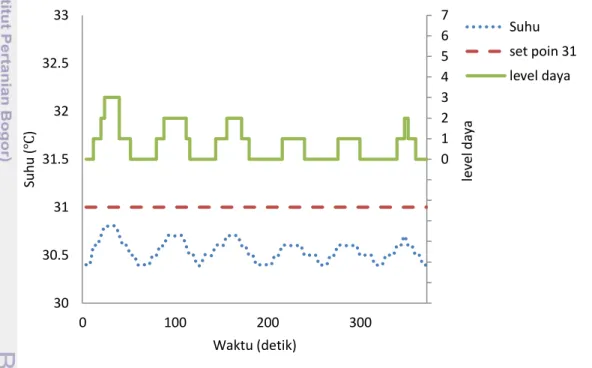
Gambar 12 Fluktuasi suhu dan level daya pada set poin 47 perlakuan pertama Pengambilan data selanjutnya dilakukan pada set poin suhu 31 dan menghasilkan pola grafik yang sama dengan set poin suhu 47 (Gambar 13). Pada set poin rendah rata-rata suhu pengendalian sebesar 30.98 , simpangan maksimum dari rata-rata adalah 31.6 ,dan simpangan minimum dari rata-rata adalah 30.5 sehingga menghasilkan simpangan terjauh pengendalian sebesar 1.1 yang berarti fluktuasi suhu pengendalian sebesar 1.1 . Semakin besar simpangan terjauh pengendalian, maka sistem kendali masih mengalami kesulitan dalam mempertahankan suhu.
Grafik yang dihasilkan pada perlakuan pertama di atas menunjukkan bahwa ketika suhu yang dihasilkan oleh pembangkit udara berada di atas set point maka daya yang diberikan adalah level daya keenam atau daya minimum, dan berlaku sebaliknya, sehingga fluktuasi suhu konstan pada set poin. Pola grafik yang dihasilkan masing-masing set poin relatif sama. Bila ditunjau dari simpangan terhadap set poin, simpangan minimum dan maksimum dari set point adalah sama yaitu 0.5 .
Perlakuan kedua dilakukan untuk menyempurnakan perlakuan pertama. Bila perlakuan pertama simpangan dari set poin adalah 0.5 , maka pada perlakuan kedua ini selisih suhu set poin dan suhu pengukuran atau delsuhu yang digunakan untuk mengeksekusi level daya berada dalam interval 0.5. Mulai dari delsuhu 0 hingga 0.5 dengan rentang antara satu dengan yang lain sebesar 0.1 maka level daya yang digunakan akan berbeda (Lampiran 7). Level daya yang digunakan pada perlakuan kedua ini sebanyak tujuh level, mulai dari level daya nol sampai dengan 6 sehingga hasil yang didapatkan seharusnya memiliki simpangan pengendalian terjauh atau fluktuasi suhu pengendalian yang lebih kecil dari pada pengukuran pertama (Gambar 14).
Gambar 14 Fluktuasi suhu dan level daya pada set poin 31 perlakuan kedua Gambar 14 menunjukan bahwa terjadi fluktuasi suhu di bawah set poin, artinya algoritma yang digunakan tidak dapat mencapai set poin. Level daya kedua tidak dapat menaikan suhu udara yang dikeluarkan oleh AC. Sistem kendali akan memberikan level daya kedua bila delsuhu yang terjadi adalah 0.3 , namun karena level daya kedua tidak dapat menaikkan suhu maka delsuhu yang selanjutnya terjadi bukan menjadi semakin kecil tetapi menjadi semakin besar kembali. Sehingga setelah mengeksekusi level daya kedua, sistem kendali akan memberikan level daya pertama karena delsuhu yang terjadi sebesar 0.4 . Semakin kecil delsuhu artinya suhu yang dibangkitkan oleh pembangkit udara semakin mendekati set poin. Terdapat banyak faktor yang mempengaruhi data hasil
pengukuran tersebut, antara lain karena adanya AC yang menyala terus menerus. AC yang digunakan untuk menurunkan kelembaban dalam pengendalian suhu dengan set poin rendah ini akan mempengaruhi suhu yang terjadi, AC akan menghasilkan kelembaban dan suhu yang rendah. Kelembaban yang rendah akan dinaikan oleh uap air yang dihasilkan oleh pemanas air. Sehingga akan terjadi fluktuasi kelembaban. Fluktuasi kelembaban berbanding terbalik dengan fluktuasi suhu, sehingga bila kelembaban yang dihasilkan tinggi maka suhu yang dihasilkan akan rendah. Hal tersebut juga yang menyebabkan pada level daya kedua tidak dapat menaikan suhu. Perlakuan kedua untuk set point rendah menghasilkan suhu rata-rata pengendalian sebesar 30.55 , suhu maksimum yang dapat dicapai sebesar 30.8 dan suhu minimum yang dapat dicapai sebesar 30.4 . Fluktuasi suhu yang terjadi dengan menggunakan algoritma pemograman kedua ini sebesar 0.4 . Selisih suhu antara suhu yang terjadi dengan suhu set poin sebesar 0.55 .
Selisih antara suhu rata-rata pengukuran dengan set poin sebesar 0.5 , menunjukan bahwa suhu yang dihasilkan oleh pemanas udara pada perlakuan kedua ini (baik set poin tinggi ataupun rendah) tidak dapat mencapai set poin yang diinginkan. Terdapat dua faktor utama yang mempengaruhi, yaitu sistem kendali yang dirancang dan fluktuasi suhu kelembaban. Sistem kendali yang dirancang menyediakan tujuh tingkat daya atau disebut juga dengan tujuh level daya. Bila dicermati pada Gambar 14 dan Gambar 15 pada level daya kedua tidak dapat menaikkan suhu. Daya yang digunakan untuk dapat menaikan suhu pada level daya kedua seharusnya lebih besar dari pada level daya kedua yang saat ini digunakan. Permasalahan itu dapat diselesaikan dengan memperkecil delsuhu untuk pindah level daya, perlu penambahan daya pemanas untuk level daya maksimal (level daya 0, 1, 2 dan 3) dan penurunan daya untuk level daya minimal (level daya 6, 5 dan 4). Rentang daya yang saat ini digunakan pada sistem kendali mempunyai perbedaan 5% dari daya sebelumnya, artinya apabila level daya nol adalah daya maksimal maka level daya pertama adalah 95% dari daya maksimum dan level daya kedua adalah 90% dari daya maksimum begitu seterusnya. Walaupun suhu yang dihasilkan tidak dapat mencapai set poin, fluktuasi suhu yang terjadi pada perlakuan kedua ini lebih kecil dari pada perlakuan pertama, sehingga dapat dikatakan bahwa pada algoritme pemograman kedua lebih dapat mempertahankan suhu dari pada algoritma pemograman pertama.
Kedua set point di atas merupakan set poin tertinggi dan terendah atau nilai kritis yang memungkinkan dicapai oleh sistem kendali. Oleh karena itu kemampuan sistem kendali perlu dicoba dengan set point diantara nilai kritis tersebut, oleh karena itu pengujian selanjutnya dilakukan pada set point 40 (Gambar 16) dengan perlakuan algoritme kedua.
Gambar 16 Suhu sistem kendali, set point 40 dan level daya perlakuan kedua Pada set poin suhu 40 dengan set poin kelembaban 45% fluktuasi suhu yang terjadi tepat pada nilai set poin. Suhu rata-rata pengendalian pada set poin ini
sebesar 40.1 dengan suhu maksimal sebesar 40.3 dan suhu minimal sebesar 39.87 . Sehingga fluktuasi suhu pengendalian yang terjadi sebesar 0.4 . Fluktuasi suhu yang terjadi sama dengan fluktuasi suhu pada set poin kritis, sehingga dapat dikatakan bahwa sistem kendali memiliki nilai kepresisian yang tinggi. Level daya yang aktif bervariasi dari level daya ketiga hingga level daya keenam,namun karena suhu yang dihasilkan dominan diatas set point maka level daya yang dominan aktif adalah level daya keenam.
Berdasarkan data hasil pengukuran suhu dan level daya yang aktif serta perbandingannya dengan set poin dari perlakuan pertama dan kedua, dapat dikatakan bahwa algoritma pada perlakuan kedua merupakan algoritma yang lebih baik untuk pengendalian suhu karena fluktuasi suhu atau simpangan terjauh suhu pengendalian hanya 0.4 . Walaupun pada set poin tertinggi dan terendah fluktuasi suhu tidak tepat pada set point karena kedua set point tersebut berada pada titik kritis suhu yang mampu dicapai oleh pemanan udara dengan level daya maksimal seperti yang ditunjukan oleh Tabel 1.
Pengendalian Kelembaban
Pengendalian kelembaban berbeda dengan pengendalian suhu. Pengendalian suhu dilakukan dengan melibatkan suhu secara langsung, namun pada pengendalian kelembaban atau kelembaban relatif dilakukan secara tidak langsung. Artinya algoritme yang digunakan untuk pengendalian kelembaban menggunakan nilai H atau kelembaban mutlak bukan menggunakan RH atau kelembaban relatif. Besar atau kecilnya nilai H dihitung dengan melibatkan nilai suhu dan kelembaban yang dibaca oleh sensor. Selain itu aktuator yang digunakan dalam pengendalian kelembaban berbeda dengan aktuator yang digunakan untuk pengendalian suhu. Pembangkitan dan pengendalian suhu hanya menggunakan pemanas udara, namun dalam pembangkitan dan pengendalian kelembaban menggunakan pemanas air dan AC. AC akan memberikan pengaruh kelembaban yang rendah, kelembaban yang rendah dibutuhkan dalam proses pengeringan, tetapi bila kelembaban terlalu rendah maka hasil dari pengeringan tidak dapat optimal, sehingga dalam pembangkitan kelembaban oleh alat pembangkit udara ini menggunakan pemanas air, pemanas air menghasilkan uap air yang akan menaikan kelembaban bila kelembaban yang dihasilkan oleh AC terlalu rendah. Pemanas air dan AC seharusnya bekerja secara bersama-sama dan saling mengisi dalam menghasilkan kelembaban yang diinginkan, namun karena AC tidak dapat dikendalikan dengan sistem kendali yang sudah dirancang, maka AC akan dibiarkan bekerja secara terus-menerus dan hanya pemanas air yang dikendalikan.
Tabel 2 Level daya, daya dan kelembaban
Bila selisih dari H dan H bernilai negatif maka akan langsung mengeksekusi level daya keenam. Penggunaan level daya dalam pengendalian kelembaban sangat ditentukan oleh selisih H dan H . Apabila kelembaban yang dikendalikan dengan level-level daya yang telah ditentukan masih mengalami masalah, maka perlu untuk dilakukan pengaturan ulang besar daya pada masing-masing level daya tersebut.
Pada alat pembangkit udara ini, pengendalian suhu dan kelembaban dilakukan secara bersamaan sehingga bukan hanya pemanas air dan AC tapi pemanas udara juga menyala dengan level daya tertentu, oleh karena itu perlu diamati pengaruh penyalaan ketiga aktuator dengan nilai kelembaban yang dihasilkan. Pola grafik nilai H dan level daya terhadap waktu pada semua perlakuan adalah sama yaitu berfluktuasi di atas
H
.Gambar 20 Hubungan H,
H
dan level daya perlakuan kedua set poin 31 Fluktuasi H yang berada di atas set poin menyebabkan level daya yang diberikan oleh sistem kendali kepada pemanas air konstan pada level daya keenam, karena selisih antaraH
dan H bernilai negatif. Namun berbeda dengan Gambar 20, fluktuasi H cenderung berada di bawah set poin, sehingga level daya yang diberikan kepada pemanas air adalah level daya kelima dan keenam. Perbedaan fluktuasi H pada Gambar 20 disebabkan karena udara yang dikeluarkan oleh AC terlalu kering, sehingga nilai H berfluktuasi di bawah set poin.Gambar 21 Hubungan kelembaban dan H perlakuan pertama set poin 42%, 31
Gambar 22 Hubungan kelembaban dan H perlakuan kedua set poin 42%, 31
Gambar 24 Hubungan kelembaban dan H perlakuan kedua set poin 36%, 47 Berdasarkan Psychrometric Chart, seharusnya pola fluktusi kelembaban dan kelembaban mutlak tidak berbanding terbalik, namun pada grafik hasil pengujian didapatkan bahwa semua fluktuasi kelembaban dan kelembaban mutlak berbanding terbalik. Perbedaan pola fluktuasi tersebut disebabkan karena adanya pengaruh suhu ketika pembangkitan dan pengendalian kelembaban. Uap yang dihasilkan oleh pemanas air adalah uap air dengan suhu yang tinggi, sehingga besar kelembaban mutlak akan naik. Selain itu karena kondisi AC yang kurang baik, AC mengeluarkan udara dingin dengan uap air (ditandai dengan adanya proses pengembunan di dinding akrilik dan di pompa sentrifugal) sehingga menyebabkan udara hasil pembangkitan alat pembangkit udara dengan set poin rendah menghasilkan kelembaban yang tinggi.
Pengendalian kelembaban dengan menggunakan parameter H kurang efektif walaupun dapat menaikkan atau menurunkan kelembaban. Pada perlakuan pertama dengan set poin 36% (Gambar 23) kelembaban pengendalian rata-rata sebesar 38.1%, sedangkan pada set poin 42% (Gambar 21) sebesar 44.3%. Begitu juga dengan perlakuan kedua, pada set point 36% (Gambar 24) kelembaban pengendalian rata-rata adalah 39%, sedangkan pada set point 42% (Gambar 22) adalah 43.4%. Terdapat perbedaan antara perlakuan pertama dan perlakuan kedua, yaitu simpangan terjauh pengendalian atau fluktuasi kelembaban pengendalian. Pada perlakuan pertama simpangan terjauh yang terjadi sebesar 2% saat set point rendah dan 1.6% pada set point tinggi. Pada perlakuan kedua simpangan terjauh pengendalian kelembaban sebesar 0.7% pada set point tinggi dan rendah. Jadi walaupun sistem kendali dan alat pembangkit udara tidak dapat mengendalikan kelembaban pada set point, algoritma yang digunakan pada perlakuan kedua relatif dapat mempertahankan kelembaban karena fluktuasi kelembaban pengendalian yang terjadi lebih kecil dari pada perlakuan pertama.
SIMPULAN DAN SARAN
Simpulan
Alat pembangkit udara terkendali untuk pengeringan gabah telah berhasil dirancang dengan menggunakan dua aktuator yang dapat diatur dan satu aktuator tetap. Rangkaian yang digunakan pada aktuator adalah zero crossing dengan dua dan tujuh level daya. Alat pembangkit udara terkendali mampu menaikkan maupun menurunkan suhu dan kelembaban. Suhu dan kelembaban dapat dipertahankan dengan konstan, namun kurang mampu untuk mengendalikan tepat pada set poin karena pengaturan besar daya yang kurang tepat pada masing-masing level daya. Galat yang dihasilkan relatif besar yaitu 0.5 untuk pengendalian suhu dan 3% untuk pengendalian kelembaban. Fluktuasi suhu yang terjadi sebesar 0.4 berada tepat pada set poin suhu dan fluktuasi kelembaban sebesar 0.7% berada diatas set poin kelembaban.
Saran
Dalam perancangan sistem kendali otomatis perencanaan besar daya yang digunakan untuk masing-masing level daya sangat penting, pengaturan daya pada masing-masing level daya harus diatur ulang. Pengaturan ulang dapat dilakukan dengan mengatur potensio dengan metode trial and error. Pengendalian dengan menggunakan tujuh level daya sebaiknya diganti dengan pengendalian berbasis mikrokontroler, sehingga variasi level daya yang digunakan bisa menjadi lebih banyak. Diperlukan suatu mekanisme untuk menghambat uap air air yang dikeluarkan oleh pemanas air, sehingga kelembaban dapat turun kenilai minimal yang dihasilkan oleh AC.
DAFTAR PUSTAKA
Bejo A. 2007. C&AVR Rahasian Kemudahan Bahasa C dalam Mikrokontroler ATMEGA8535. Yogyakarta (ID) : Graha Ilmu Yogyakarta.
Bishop O. 2006. Dasar-Dasar Elektronika. Jakarta (ID): Erlangga.
Heryanto AM. 2008. Pemograman Bahasa C untuk Mikrokontroler ATMEGA8535. Yogyakarta (ID): Penerbit Andi.
Juslam, Roswaldi SK, Kartika, Ramal S. 2010. Pembangunan kontrol unit berbasis mikrokontroler ATMEGA 8. Elektron. 2(1): 57-68.
Nelwan LO, Subrata IDM, Wulandari D, Mulyantara LT, Djafar MJ. 2013. Pengembangan sistem pengeringan gabah mandiri energi menggunakan sistem Heat Pump Absorpsi dan pengoperasian terkendali berenergi gasifikasi sekam [laporan penelitian]. Bogor (ID): Institut Pertanian Bogor. Prasetyo T, Abdullah K, Dhiputra IMK, Tambunan AH, Nelwan LO. 2008.
Pengaruh waktu pengeringan dan tempering terhadap mutu beras pada pengeringan gabah lapis tipis. JIST. 11 (1) : 29-37.
Syaiful M, Hargana. 2009. Profil suhu pada proses pengeringan produk pertanian dengan simulasi Computational Fluid Dynamics (CFD). Reaktor 12(3) : 195-202.
Lampiran 6 Diagram alir penelitian
Mulai
Identifikasi masalah
Penentuan batasan masalah
Identifikasi komponen
Perancangan dan Pembuatan
Alat Pembangkit udara Sistem kendali
Pembangkit udara dengan suhu dan kelembaban terkendali
Uji kinerja sistem kendali
Bekerja dengan baik
Uji kinerja pembangkit udara terkendali
Bekerja dengan baik
Selesai ya
ya
Lampiran 8 Riwayat Hidup
Riwayat Hidup
Penulis dilahirkan di Kediri pada tanggal 22 November 1991 dari ayah Sulis dan ibu Yayuk Widayati. Penulis adalah putra petama dari dua bersaudara. Tahun 2010 penulis lulus dari SMA Negeri 7 Kediri dan pada tahun yang sama penulis lulus seleksi masuk IPB dan diterima di Departemen Teknik Mesi dan Biosistem, Fakultas Teknologi Pertanian.