FAKULTAS TEKNOLOGI DAN INFORMATIKA
INSTITUT BISNIS DAN INFORMATIKA STIKOM SURABAYA 2016
RANCANG BANGUN ALAT PENGAYUN BAYI BERBASIS MIKROKONTROLER MENGGUNAKAN SENSOR SUARA, KELEMBABAN DAN GAS AMONIA
TUGAS AKHIR
Program Studi S1 Sistem Komputer Fakultas
Teknologi dan Informatika
Oleh :
x
HALAMAN JUDUL...i
HALAMAN SYARAT ...ii
MOTTO ...iii
HALAMAN PERSEMBAHAN ...iv
HALAMAN PENGESAHAN... v
HALAMAN PERNYATAAN ...vi
ABSTRAK ...vii
KATA PENGANTAR ...viii
DAFTAR ISI... x
DAFTAR GAMBAR ... xv
DAFTAR TABEL...xviii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 3
1.4 Tujuan ... 3
1.5 Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 6
2.1 Ayunan Bayi ... 6
2.2 Urine (Air Kencing) ... 6
2.3 Amonia Pada Urin... 7
xi
2.4.1 Mikrokontroler ATMega32 ... 8
2.4.2 Downloader USBAsp ... 10
2.4.3 ADC (Analog to Digital Converter) ... 11
2.5 Sensor... 13
2.5.1 Sensor Suara ... 13
2.5.2 Desibel ... 14
2.5.3 Sensor Kelembaban ... 14
2.5.4 Kelembaban Nisbi ... 16
2.5.5 Sensor Gas Amonia ... 16
2.5.6 PPM (Parts per Million)... 19
2.6 Aktuator ... 20
2.6.1 LCD (Liquid Crystal Display)... 20
2.6.2 Motor DC (Direct Current) ... 21
2.6.3 IC L298 ... 22
2.6.4 PWM (Pulse Width Modulation) Motor DC ... 23
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM ... 25
3.1 Metode Penelitian ... 25
3.2 Model Perancangan... 26
3.3 Perancangan Perangkat Keras... 27
3.3.1. Perancangan Minimum Sistem ATMega32... 27
3.3.2. Perancangan Sensor Kelembaban ... 33
3.3.3. Perancangan Sensor Amonia ... 35
3.3.4. Perancangan Sensor Suara ... 36
3.3.6. Perancangan Motor Driver... 38
3.3.7. Perancangan Output Musik/Alaram... 39
3.4 Perancangan Mekanik ... 40
3.4.1. Perancangan Motor Pengayun ... 43
3.4.2. Perancangan LCD (Liquid Cristal Display) ...44
3.4.3. Perancangan Sensor Suara ... 45
3.4.4. Perancangan Sensor Gas Amonia ... 45
3.4.5. Perancangan Sensor Kelembaban ... 46
3.4.6. Perancangan Output Musik/Alaram... 47
3.5 Perancangan Perangkat Lunak ... 49
3.5.1. Setting Wizard Pada CodeVision AVR ... 49
3.5.2. Perancangan Program Pada Mikrokontroler ... 55
BAB IV HASIL PENGUJIAN DAN PENGAMATAN... 58
4.1 Pengujian Mikrokontroler ... 58
4.1.1. Tujuan Pengujian ... 58
4.1.2. Alat yang Dibutuhkan ... 58
4.1.3. Prosedur Pengujian ... 58
4.1.4. Hasil Pengujian ... 59
4.2 Pengujian Ayunan Bayi ... 60
4.2.1. Tujuan Pengujian ... 60
4.2.2. Alat yang Dibutuhkan ... 60
4.2.3. Prosedur Pengujian ... 60
4.2.4. Hasil Pengujian ... 61
xiii
4.3.1. Tujuan Pengujian ... 61
4.3.2. Alat yang Dibutuhkan ... 61
4.3.3. Prosedur Pengujian ... 61
4.3.4. Hasil Pengujian ... 62
4.4 Pengujian Motor... 62
4.4.1. Tujuan Pengujian ... 62
4.4.2. Alat yang Dibutuhkan ... 62
4.4.3. Prosedur Pengujian ... 63
4.4.4. Hasil Pengujian ... 63
4.5 Pengujian Motor Driver ... 63
4.5.1. Tujuan Pengujian ... 63
4.5.2. Alat yang Dibutuhkan ... 63
4.5.3. Prosedur Pengujian ... 64
4.5.4. Hasil Pengujian ... 65
4.6 Pengujian Rangkaian Musik ... 65
4.6.1. Tujuan Pengujian ... 65
4.6.2. Alat yang Dibutuhkan ... 66
4.6.3. Prosedur Pengujian ... 66
4.6.4. Hasil Pengujian ... 66
4.7 Pengujian Sensor Suara... 67
4.7.1 Tujuan Pengujian ... 67
4.7.2 Alat yang Dibutuhkan ... 67
4.7.3 Prosedur Pengujian ... 67
4.8 Pengujian Sensor Amonia... 70
4.8.1. Tujuan Pengujian ... 70
4.8.2. Alat yang Dibutuhkan ... 71
4.8.3. Prosedur Pengujian ... 71
4.8.4. Hasil Pengujian ... 72
4.9 Pengujian Sensor Kelambaban ... 88
4.9.1 Tujuan Pengujian ... 88
4.9.2 Alat yang Dibutuhkan ... 88
4.9.3 Prosedur Pengujian ... 88
4.9.4 Hasil Pengujian ... 89
4.10 Pengujian Sistem... 89
4.10.1 Tujuan Pengujian ... 89
4.10.2 Alat yang Dibutuhkan ... 90
4.10.3 Prosedur Pengujian ... 90
4.10.4 Hasil Pengujian ... 91
4.11 Hasil Analisa Keseluruhan Sistem... 101
BAB V PENUTUP... 103
5.1 Kesimpulan ... 103
5.2 Saran ... 103
DAFTAR PUSTAKA ... 105
LAMPIRAN ... 108
1 BAB I PENDAHULUAN
1.1 Latar Belakang Masalah
Di zaman sekarang ini, perkembangan dalam bidang teknologi terus
dikembangkan agar memberikan kemudahan untuk meringankan pekerjaan
manusia serta memberikan keuntungan dalam menghemat tenaga dan waktu
dalam melakukan suatu kegiatan. Selain itu perkembangan teknologi tersebut juga
diharapkan memiliki nilai lebih dari teknologi sebelumnya. Perkembangan
teknologi salah satunya terjadi pada peralatan atau perlengkapan bayi yang
bertujuan meringankan pekerjaan para ibu.
Sering sekali ibu rumah tangga kelelahan dalam menimang untuk
menidurkan anaknya dan setelah itu meninggalkan anaknya dalam keadaan
tertidur di ranjang untuk melakukan aktivitas yang lain. Dan akibatnya bila anak
tersebut terjaga dan menangis, tidak ada seorang pun yang bisa menghiburnya.
Untuk membantu meringankan tugas ibu maka perlu adanya alat yang otomatis
dapat menghibur sementara anak menangis tersebut. Salah satunya adalah alat
penimang otomatis. (Purba,2013)
Penelitian sebelumnya yang berhubungan dengan teknologi peralatan
otomatis untuk kebutuhan bayi (Purba,2013) membahas hal yang berhubungan
dengan pendeteksian menggunakan sensor suara dan sensor kelembaban yang
akan mengayun bayi jika hasil input suara mendeteksi bayi menangis dan
meyalakan alarm jika bayi buang air jika terdeteksi dari input sensor kelembaban.
(Rachmadyanti,2010) mengembangkan penelitian pada gerak motor ayunan bayi
yang menggunakan metode kontrol PID (Proportional Integral Derivative) controller.
Berdasarkan beberapa permasalahan yang berhubungan dengan ibu bayi
diatas dan penelitian yang telah dilakukan sebelumnya, maka penyusun mencoba
untuk merancang sebuah alat pengayun bayi otomatis untuk mengayun sementara
bayi yang terbangun atau bersuara, diikuti dengan penanda musik ketika bayi
terbangun atau bersuara serta informasi pada layar LCD (Liquid Crystal Display) jika bayi tidak tertidur kembali. Alat ini dapat mengayun secara otomatis untuk
sementara sampai ibu bayi datang dan memberikan penanda kepada ibu bayi.
Penanda pada alat ini bertujuan agar bayi tidak terlalu lama menangis jika bayi
terbangun kemudian menangis. Tujuan lain dari alat ini adalah untuk memberikan
informasi/alasan yang menyebabkan bayi bersuara/menangis dari hasil proses
deteksi sensor suara, kelembaban dan amonia pada alat pengayun tersebut.
1.2 Rumusan Masalah
Berdasarkan latar belakang diatas maka dapat dirumuskan permasalahan :
1. Bagaimana cara mendeteksi secara benar atau mendekati keadaan bayi saat
terbangun dari tidur atau bersuara berdasarkan hasil deteksi sensor-sensor
yang digunakan pada alat pengayun bayi?
2. Bagaimana cara menjalankan pengayun secara otomatis dan memberikan
penanda dini pada ibu bayi ketika bayi terbangun dan informasi dari perkiraan
3
1.3 Batasan Masalah
Dalam perancangan alat pengayun bayi otomatis ini, terdapat beberapa
batasan masalah untuk menghindari pembahasan yang lebih luas terkait dengan
alat, batasan masalah tersebut antara lain:
1. Ayunan digunakan hanya untuk 1 bayi.
2. Bayi dalam keadaan sehat.
3. Bayi tidak menggunakan popok bayi.
4. Berat maksimal bayi 8 kg.
5. Pengujian dilakukan di tempat yang minimnoise.
6. Sistem bekerja setelah mendapat sinyal berupa suara bayi.
1.4 Tujuan
Berdasarkan rumusan masalah yang diuraikan diatas, maka tujuan
penelitian ini adalah sebagai berikut :
1. Mengolah secara benar atau mendekati untuk hasil deteksi sensor-sensor yang
digunakan pada alat pengayun bayi.
2. Alat dapat mengayun secara otomatis untuk menenangkan sementara bayi
hingga ibu bayi datang dan memberikan penanda dini pada ibu bayi dan juga
informasi dari perkiraan alasan bayi terbangun atau bersuara.
1.5 Sistematika Penulisan
Pembahasan Tugas Akhir ini secara garis besar tersusun dari 5 (lima)
bab, yaitu diuraikan sebagai berikut:
1. BAB I PENDAHULUAN
Pada bab ini akan dibahas mengenai latar belakang masalah, batasan
2. BAB II LANDASAN TEORI
Pada bab ini akan dibahas teori penunjang dari permasalahan, yaitu
mengenai Ayunan Bayi, Urine (Air Kencing), Amonia Pada Urin,
Mikrokontroler ATMega32, Downloader USBAsp, ADC (Analog to Digital Converter), Sensor Suara, Desibel, Sensor Kelembaban, Kelembaban Nisbi, Sensor MQ-137, PPM (Parts per Millon), LCD (Liquid Crystal Display), Motor DC (Direct Current), IC L298 dan PWM (Pulse Width Modulation). 3. BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM
Pada bab ini akan dibahas tentang blok diagram sistem serta metode
yang digunakan dalam pembuatan rancang bangun. Perancangan dilakukan
dengan melakukan perancangan perangkat keras yang meliputi perancangan
minimum sistem ATMega32, perancangan sensor kelembaban, perancangan
sensor amonia, perancangan sensor suara, perancangan LCD (Liquid Crystal Display), perancangan motor driver dan perancangan musik/alarm. Kemudian dilanjutkan dengan perancangan alat, yaitu perancangan yang
berhubungan dengan mekanik pada rancang bangun. Perancangan alat yang
dilakukan meliputi perancangan motor pengayun, LCD (Liquid Crystal Display), sensor suara, sensor gas amonia, sensor kelembaban dan output musik/alarm. Terakhir dilakukan perancangan perangkat lunak yang akan
menjalankan seluruh sistem dengan pusat kendali pada mikrokontroler
dengan pembahasan tentang setting wizard pembuatan program dan diagram
5
4. BAB IV HASIL DAN PEMBAHASAN
Pada bab ini akan dibahas mengenai hasil dari pengujian
masing-masing komponen pendukung dalam pembuatan rancang bangun yang
nantinya hasil dari pengujian masing-masing komponen akan menentukan
apakah komponen bekerja dengan baik. Selain itu data dari pengujian sensor
dapat digunakan sebagai dasar pembuatan program pada sistem keseluruhan
yang mengambil nilai penentuan kondisi yang tepat dan dapat digunakan
sebagai dasar penentuan letak posisi tiap komponen. Kemudian akan
dibahas dari hasil pengujian perancangan seluruh sistem yang nantinya
dapat diperoleh hasil nilai-nilai kondisi yang tepat agar sistem dapat bekerja
dengan baik sesuai dengan ide perancangan.
5. BAB V KESIMPULAN DAN SARAN
Berisi kesimpulan yang didapat dari hasil penelitian berdasarkan
6 2.1 Ayunan Bayi
Salah satu jenis ayunan bayi otomatis terutama yang digunakan pada
perancangan adalah babyelle swing. Ayunan bayi elektrik ini merupakan ayunan yang dapat mengayun secara otomatis menggunakan sumber tegangan dari baterai
atau adaptor pada saat ayunan dinyalakan. Ayunan ini menggunakan rangkaian
mikrokotroler yang berasal dari pabrik pembuatan ayunan tersebut.
Mikrokontroler yang digunakan telah terintegrasi dengan bagian motor, rotary,
musik dan speaker pada ayunan. Kecepatan pada ayunan dihasilkan dari analisa
rotary oleh mikrokontroler untuk kecepatan pada ayunan sesuai dengan input
kecepatan yang diinginkan. Berikut spesifikasi pada ayunan bayi tersebut :
1. Kecepatan bisa diatur.
2. Bisa 2 posisi (posisi tidur atau posisi duduk).
3. Ayunan bisa diatur sampai 6 jenis kecepatan.
4. Dilengkapi dengan musik untuk menenangkan bayi.
5. Terdapat mainan pada ayunan.
6. Bisa menahan berat bayi sampai 11 kilogram.
7. Berat ayunan 6 kilogram.
2.2 Urine (Air Kencing)
Urin dibentuk oleh ginjal dalam menjalankan sistem homostatik. Sifat dan
susunan urin dipengaruhi oleh faktor fisiologis (misalkan masukan diet, berbagai
7
patologis (seperti pada gangguan metabolisme misalnya diabetes mellitus dan
penyakit ginjal). Oleh karena itu pemeriksaan urin berguna untuk menunjang
diagnosis suatu penyakit. Pada penyakit tertentu, dalam urin dapat ditemukan
zat-zat patologik antara lain glukosa, protein dan zat-zat keton (Probosunu, 1994).
Jumlah urin yang dihasilkan seseorang dipengaruhi oleh jumlah air yang
diminum, anti-diuretika hormon (ADH) saraf dan banyaknya garam yang harus
dikeluarkan. Unsur sedimen dibagi atas 2 golongan : golongan organik yang
berasal dari organ / jaringan, golongan anorganik yang tidak berasal dari organ
atau jaringan (Dahelmi, 1991).
Urine memiliki sifat kimia dan fisik diantaranya adalah jumlah rata-rata
1-2 liter/hari tergantung banyaknya cairan yang dimasukan, berwarna
bening/orange pucat tanpa endapan, mempunyai bau yang menyengat, dan reaksi
sedikit asam terhadap lakmus dengan pH rata-rata 6. Sedangkan komposisi urine
adalah 96% air, Natrium, Pigmen Empedu,, 1,5% garam,Kalium, Toksin,, 2,5% urea, kalsium, Bikarbonat, Kreatinin N, Magnesium, Kreatini, Khlorida, Asam urat N, Sulfat anorganik,Asam urat, Fosfat anorganik, Amino N, Sulfat, Amonia N dan Hormon. (Armstrong, 1998).
2.3 Amonia Pada Urin
Amonia merupakan senyawa yang ada didalam urin, yang bersifat basa
bila terkena sinar atau panas akan menimbulkan bau menyengat. Bau amonia
tersebut berasal dari peruraian urea sebagai komponen bahan organik terbanyak
dalam urin oleh jasad renik menjadi energi dan gas NH3. Urin mengandung
amonium sianat (NH4CNO), dan jika terkena sinar atau panas akan menjadi urea
(CO2) dan amonia (NH3). Selanjutnya amonia (NH3) bereaksi dengan air (H2O)
yang akan terhidrolisis menjadi amonium (NH4+) dan ion hidroksida (OH-).
(Mukaromah, dkk., 2010).
Amonia merupakan limbah cair yang berasal dari limbah domestik
(rumah tangga), dari industri, dan buangan lainnya. Komposisi dan karakteristik
limbah cair sebagian besar terdiri dari air (99,9%) dan sisanya zat padat. Sifat air
limbah dibedakan menjadi 3 bagian yaitu sifat fisika, kimia, dan biologis. Sifat
fisika seperti kandungan zat padat, bau misalnya bau amonia dari limbah yang
berasal dari kamar mandi dan WC (toilet) merupakan hasil peruraian urea dari
komponen urin oleh bakteri, warna dan temperatur. Sifat kimia meliputi bahan
kimia organik seperti fenol, protein, karbohidrat, lemak, minyak, dan surfaktan,
dan sifat biologis seperti mikroorganisme bakteri, jamur, ganggang, protozoa,
virus dan sebagainya. (Sugiharto,2005).
Efek Amoniak (NH3) terhadap kesehatan dan lingkungan adalah
mengganggu pernapasan, iritasi selaput lendir hidung dan tenggorokan pada
konsentrasi 5000 sebagai Parts Per Million (ppm) dapat menyebabkan ederma
laryng, paru, dan akhirnya dapat menyebabkan kematian, iritasi mata (mata
merah, pedih, dan berair) dan bisa menyebabkan kebutaan total, iritasi kulit dapat
menyebabkan terjadinya luka bakar (frostbite), bersifat teratogenik pada paparan
yang menahun. (Mukono, 2005).
2.4 Mikrokontroler
2.4.1 Mikrokontroler ATMega32
9
Semiconductor) 8-bit buatan Atmel. AVR (Alf and vegard’s Risc processor) memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16-bit dan
sebagian besar instruksi dieksekusi dalam 1 siklus clock. Mikrokontroler AVR
(Alf and vegard’s Risc processor) memiliki arsitektur Havard, yaitu memisahkan memori untuk kode program dan memori data. AVR (Alf and vegard’s Risc processor) berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing). AVR (Alf and vegard’s Risc processor) dapat dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATmega dan AT86RFxx. Pada
dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan
fungsinya. (Sunardi, dkk., 2009). Fitur-fitur yang dimiliki oleh microcontroller AVR (Alf and vegard’s Riscprocessor) ATmega32 adalah sebagai berikut:
1. Dapat bekerja pada tegangan 4,5 Volt–5,5 Volt.
2. Merupakan mikrokontroler AVR (Alf and vegard’s Risc processor) 8 bit berkemampuan tinggi dengan daya yang rendah.
3. Memiliki 32 x 8general purpose working register.
4. Kecepatan eksekusi program yang dimiliki cepat karena sebagian besar instruksi dieksekusi dalam 1 clock dengan arsitektur RISC (Reduced Instruction Set Computing) hamper mencapai 16 MIPS (Million Instruction Per Second) pada frekuensi 16 MHz (MegaHertz).
5. Memori data dan program yang tidak mudah hilang (Nonvolatile Programand Data Memories) dengan pemrograman flash memiliki kapasitas 8 KB (KiloBytes).
7. Fasilitastimer/counteryang ada pada mikrokontroler ini terdiri dari dua buah Timer/Counter8 bit dan satu buahTimer/Counter16 bit.
8. Memiliki 4 kanal PWM (Pulse Width Modulation) dan memiliki 6 kanal ADC (Analog to Digital Converter) 10 bit.
9. Memiliki pemrograman serial USART (Universal Serial Asyncronous and Syncronous Receiver Transmitter), On-chip Analog Comparator, dan interrupt. (Madhawirawan, 2012)
Gambar 2.1KonfigurasipinATmega32
Sumber : (Atmel, 2009)
2.4.2 Downloader USBAsp
11
dalam chip. Programer ini hanya menggunakan firmware Universal Serial Bus driver dan tidak diperlukan USB (Universal Serial Bus) kontroler khusus.(Stevanus, 2012).
USBAsp juga merupakan programmer mikrokontroler yang sudah
menggunakan USB (Universal Serial Bus) secara langsung sebagai sarana komunikasinya. USBAsp sudah tidak lagi menggunakan komunikasi berstandar
serial RS-232, sehingga tidak lagi memerlukan berbagai macam converteruntuk berkomunikasi dengan perangkat komputasi modern. USBAsp umumnya
dipergunakan untuk melakukan pemrograman mikrokontoller ATMEL AVR (Alf and vegard’s Risc processor). Termasuk yang sudah umum dipergunakan di Indonesia seperti attiny2313, atmega8, atmega8535, atmega16 dan atmega32.
(Stevanus, 2012).
2.4.3 ADC (Analog to Digital Converter)
ATMega32 memiliki fitur ADC (Analog to Digital Converter) 10 bit dengan metode successive approximation. ADC (Analog to Digital Converter) dikoneksikan ke 8 kanal multiplekser analog dimana mengizinkan 8 buah
tegangan masukan single-ended yang dibangun dari pin-pin pada port A. Tegangan masukan single-ended mempunyai referensi titik 0 Volt atau Ground. Piranti ini juga mendukung 16 kombinasi tegangan masukan diferensial. Dua dari
masukan diferensial (ADC1,ADC0 dan ADC3,ADC2) dilengkapi dengan penguat
terprogram, menyediakan penguatan 0 desibel (dB) (1x), 20 desibel (dB) (10x),
atau 46 desibel (dB) (200x) pada tegangan masukan diferensial sebelum konversi
Tujuan kanal masukan analog diferensial mempunyai terminal negative
bersama, yaitu ADC1, di mana masukan ADC(Analog to Digital Converter) yang lain dapat dipilih sebagai terminal masukan positif. Jika penguatan 1x atau 10x
digunakan, resolusi 8 bit dapat bekerja sesuai dengan yang diharapkan, tetapi jika
penguatan 200x digunakan, resolusi 7 bit yang dapat diharapkan. (Susilo, 2010).
Berikut dijelaskan hasil konversi ADC (Analog to Digital Converter): a. Setelah proses konversi selesai (bit ADIF berlogika “1”), hasil konversi
dapat ditemukan dalam Analog to Digital Converter Result Register (ADCL, ADCH). Untuk konversisingle-ended, hasilnya adalah :
= × 1024
Dimana VIN adalah tegangan pada pin masukan yang dipilih dan VREF
adalah tegangan refrensi yang diberikan. 0x000 merepresentasikan ground
analog, dan 0x3FF merepresentasikan tegangan referensi dikurangi satu
LSB (Least Significant Bit).
b. Jika kanal diferensial digunakan, hasilnya adalah :
= ( − ) × × 512
Dimana VPOSadalah tegangan masukan pin positif, VNEGadalah tegangan
masukan pin negatif, GAIN dalah faktor penguatan yang dipilih, dan VREF
adalah tegangan referensi. Hasilnya disimbolkan dalam bentuk
komplemen 2, dari 0x200 (-152 desimal) sampai 0x1FF (+511 desimal).
13
2.5 Sensor
2.5.1 Sensor Suara
Sensor suara adalah sebuah alat yang mampu mengubah gelombang
Sinusoidal suara menjadi gelombang sinus energi listrik. Sensor suara bekerja
berdasarkan besar/kecilnya kekuatan gelombang suara yang mengenai membran
sensor yang menyebabkan bergeraknya membran sensor yang juga terdapat
sebuah kumparan kecil di balik membran sensor naik dan turun. Oleh karena
kumparan tersebut sebenarnya adalah ibarat sebuah pisau berlubang-lubang, maka
pada saat ia bergerak naik-turun, ia juga telah membuat gelombang magnet yang
mengalir melewatinya terpotong-potong. Kecepatan gerak kumparan menentukan
kuat-lemahnya gelombang listrik yang dihasilkannya.(Purba,2013)
Salah satu komponen yang termasuk dalam sensor ini adalah Microphone atau Mic. Microphone adalah komponen elektronika dimana cara kerjanya yaitu membran yang digetarkan oleh gelombang suara akan menghasilkan sinyal listrik
dan lain-lain. Secara umum ada dua jenis microphone yaitu condenser microphonedandynamic microphone. Microphonetipecondensertersusun atas 2 keping plat tipis yang berfungsi untuk menangkap gelombang suara. Cara
kerjanya sederhana, gelombang suara yang masuk akan menggetarkan kedua plat
ini sehingga membentuk sinyal-sinyal audio yang kemudian diteruskan ke
pre-amplifier untuk dikuatkan. Karena hanya menggunakan 2 plat yang bisa
disesuaikan ukuranya, maka mic condenser ini memiliki ukuran yang kecil dan ringan. Mic tipe ini harus menggunakan daya dalam pengoperasiannya. Jika tidak
2.5.2 Desibel
Desibel adalah satuan yang digunakan untuk menyatakan kuantitas
elektrik dari perubahan kuat-lemahnya amplitudo gelombang sinyal suara yang di
dengar oleh telinga manusia. Jangkauan kuantitas yang ada pada ilmu akustik
seperti tekanan akustik, intensitas, daya, kepadatan energi sangatlah besar.
Contohnya, telinga manusia yang sehat bisa mendeteksi suara bertekanan sekecil
20mPa dan bisa bertahan selama beberapa menit dengan suara yang bertekanan
sebesar 20Pa. Akibat dari besarnya lebar jangkauan nilai tersebut maka
dikembangkan skala yang dapat mewakili kuantitas ini dengan cara yang tidak
menyusahkan. Dalam perkembangannya, ditemukan bahwa respon telinga
manusia terhadap suara lebih bergantung kepada rasio intensitas dua suara yang
berbeda dari pada perbedaan dalam intensitas.
Dengan alasan ini, skala logaritma atau bisa disebut skala level ditetapkan.
Level kuantitas ditetapkan sebagai logaritma basis 10 dari rasio kuantitas energi
dengan nilai kuantitas referensi standard. Walaupun level sebenarnya adalah
kuantitas yang tak berdimensi, tetapi diberikan unit bel sebagai penghormatan
kepada Alexander Graham Bel. Pada umumnya penggunaannya lebih praktis
dengan desibel (dB), dimana 1 desibel nilainya sama dengan 0,1 bel. Level
biasanya disimbolkan dengan huruf L dangan huruf subscriptdisebelah kanannya untuk menunjukan kuantitas level yang disimbolkan.(Tuwaidan, 2015).
2.5.3 Sensor Kelembaban
Sensor DHT11 terdiri dari elemen polimer kapasitif digunakan untuk mengukur kelembaban dan sensor temperatur. Didalamnya juga terdapat memori
15
sensor. Data hasil pengukuran dari DHT11 ini berupa digital logic yang diakses secara serial.
DHT11 merupakan sensor digital untuk temperature dan kelembaban
sekaligus yang memiliki kisaran pengukuran dari 2 – 90 persen RH (Relative Humidity) dan 0–50 derajat celcius. Data yang diperoleh berupa data pengukuran temperatur dari lingkungan. Jika, sensor membaca temperatur makin rendah maka
tegangan pull down yang dialirkan menjadi lebih besar, sehingga akan menghasilkan Vcc data yang semakin besar, data yang dihasilkan dari sensor ini
adalah sudah berupa data digital. (Mardani,2015).
Sensor DHT11 memiliki 4 pin, yaitu pin VCC, Groud, NC dan Data. Pada
perancangan ini menggunakan sensor DHT11 yang telah dilengkapi dengan
modul seperti pada gambar 2.2, sehingga menggunakan 3 pin. Pin yang digunakan
adalah VCC, Ground dan Data.
Gambar 2.2Sensor DHT11
DHT11 memiliki fitur kalibrasi yang sangat akurat. Koefisien kalibrasi ini
disimpan dalam OTP (One Time Programming) program memori, sehingga ketika internal sensor mendeteksi sesuatu suhu atau kelembaban, maka module ini
membaca koefisien sensor tersebut. Ukurannya yang kecil dengan transmisi sinyal
hingga 20 meter, membuat produk ini cocok digunakan untuk banyak aplikasi
Gambar 2.3Rangkaian DHT11
Sumber: (http://www.sunrom.com)
2.5.4 Kelembaban Nisbi
Kelembaban udara nisbi memiliki pengertian sebagai nilai perbandingan
antara tekanan uap air yang ada pada saat pengukuran (e) dengan nilai tekanan
uap air maksimum (em ) yang dapat dicapai pada suhu udara dan tekanan udara
saat pengukuran. Persamaan untuk kelembaban udara relative adalah seperti
berikut:
= × 100%
Dengan:
RH = kelembaban udara relative (%),
e = tekanan uap air pada saat pengukuran (mb),
em = tekanan uap air maksimum yang dapat dicapai pada suhu udara dan tekanan
udara saat pengukuran (mb).
Berbagai ukuran dapat digunakan untuk menyatakan nilai kelembaban
udara. Salah satunya adalah kelembaban udara relative (nisbi). (Swarinoto, dkk. ,
2011).
2.5.5 Sensor Amonia
Sensor Amonia yang digunakan adalah sensor MQ137. Materi sensitif dari
17
bersih. Konduktivitas sensor akan lebih tinggi seiring dengan meningkatnya
konsentrasi gas. Menggunakan electro circuit sederhana, Convert perubahan konduktivitas untuk menyesuaikan sinyal output konsentrasi gas. Sensor gas
MQ137 memiliki sensitivitas tinggi terhadap Amonia, juga untuk amina organik
lainnya. Sensor ini dapat digunakan untuk mendeteksi gas yang mengandung
Amonia dan cocok untuk aplikasi yang berbeda. Sensor gas MQ137 memiliki
konfigurasi sensitivitas yang baik untuk amonia, tahan lama dan memiliki sirkuit
drive circuit sederhana.
Kondisi yang tidak boleh dialami oleh sensor :
1. Terkena uap silikon organik
Uap silikon organik menyebabkan sensor tidak valid, sensor harus
menghindari kontak silikon, fixature, silikon lateks, dempul atau plastik
mengandung lingkungan silikon.
2. Gas Korosif Tinggi
Jika sensor terkena konsentrasi tinggi gas korosif (seperti H2Sz, SOX, Cl2,
HCl dll), itu tidak hanya akan mengakibatkan korosi sensor struktur, juga
menyebabkan pelemahan sensitivitas.
3. Alkali, Alkali logam garam, polusi halogen
Kinerja sensor akan berubah buruk jika sensor akan disemprot tercemar oleh
logam alkali garam terutama garam, atau terkena halogen seperti fluorin.
4. Terkena air
Sensitivitas sensor akan berkurang bila terpercik atau dicelupkan ke dalam
air.
Tegangan yang diberikan pada sensor tidak harus lebih tinggi dari nilai yang
ditetapkan, jika tidak maka menyebabkan down-lineatau pemanas rusak, dan membuat karakteristik sensitivitas sensor berubah buruk.
6. Tegangan pada pin yang salah
Untuk sensor 6 pin, jika menerapkan tegangan pada pin 1 dan pin 3 atau pin 4
dan pin 6, ketika diterapkan pada pin 2 dan pin 4 akan membuat led rusak dan
tanpa sinyal.
Kondisi berikut harus dihindari dalam penggunaan sensor :
1. Kondensasi Air
Kondensasi air pada ruangan yang sedikit akan mempengaruhi kinerja sensor
ringan. Namun, jika kondensasi air di permukaan sensor tetap pada periode
tertentu, sensitivitas sensor akan menurun.
2. Digunakan pada konsentrasi gas yang tinggi
Sensor yang ditempatkan dalam konsetrasi gas yang tinggi pada waktu yang
lama akan mempengaruhi karakteristik sensor, tidak peduli sensor listrik atau
bukan.
3. Terkena lingkungan yang merugikan dalam waktu yang lama
Sensor yang terkena lingkungan yang merugikan seperti kelembaban tinggi,
suhu tinggi, polusi yang tinggi atau alasan lain pada waktu yang lama akan
mempengaruhi kinerja sensor menjadi buruk. Hal tersebut berpengaruh
terhadap sensor listrik atau bukan.
4. Getaran
19
peneumatik obeng/ultrasonik mesin las dapat menjadi penyebab getaran.
(china-total.com)
Gambar 2.4Sensor MQ-137 2.5.6 PPM (Parts per Million)
Kebanyakan kontaminan dinyatakan sebagai Parts Per Million (ppm). Ini
berarti bahwa konsentrasi substansi tertentu sangat rendah meskipun badan
pengawas dapat mempertimbangkan itu jumlah yang signifikan. Satu ppm adalah
1 part dalam 1 million atau nilai ini setara dengan jumlah pecahan dikalikan
dengan satu juta. Cara yang lebih baik untuk memikirkan ppm adalah untuk
memvisualisasikan menempatkan empat tetes tinta di barel 55 galon air dan
pencampuran secara menyeluruh. Parts per million juga bisa dinyatakan sebagai
miligram per liter (mg / L). Pengukuran ini adalah massa dari bahan kimia atau
mencemari per satuan volume air. Karena ppm atau mg / L pada laporan
laboratorium merupakan satuan yang sama. University of Minnesota memberikan
beberapa analogi lainnya yang dapat membantu memvisualisasikan skala terlibat
dengan ppm dan ppb. Satu ppm adalah seperti: satu inci di 16 mil, satu menit
dalam dua tahun. (Satterfield, 2004)
Unit sistem metrik masuk dalam langkah 10, 100, dan 1.000. untuk
Misalnya, miligram adalah seperseribu gram (memindahkan koma desimal tiga
tempat ke kiri) dan gram adalah seperseribu dari kilogram (memindahkan koma
dari seperseribu, atau kesejuta dari kilogram bergerak enam tempat titik desimal.
Jadi, miligram adalah satu ppm dari kilogram. Oleh karena itu, satu ppm adalah
sama dengan satu miligram per kilogram. Satu miligram dalam kg adalah 1 ppm
(massa). Satu liter (L) air murni pada 4ºC dan 1 tekanan atmosfer standar berat
tepat 1 kg, jadi 1 mg / L adalah 1 ppm. Cara lain untuk mengatakan itu adalah satu
liter air beratnya 1.000 gram atau 1 juta miligram.Oleh karena itu,1 mg dalam 1
liter adalah l mg dalam 1 juta miligram atau 1 parts per million. (Satterfield,
2004).
2.6 Aktuator
2.6.1 LCD(Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama. LCD (Liquid Crystal Display) sudah digunakan diberbagai bidang, misalnya dalam alat-alat elektronik, seperti kalkulator ataupun layar komputer. Pada LCD (Liquid Crystal Display) berwarna semacam monitor, terdapat banyak sekali titik cahaya (pixel) yang
terdiri dari satu buah kristal cair sebagai suatu titik cahaya. Walaupun disebut
sebagai titik cahaya, namun kristal cair ini tidak memancarkan cahaya sendiri.
LCD (Liquid Crystal Display) LMB162A merupakan modul LCD (Liquid Crystal Display) buatan Top way dengan tampilan 2 x 16 karakter (2 baris x 16 kolom) dengan konsumsi daya rendah, sekitar 5 Volt DC (Direct Current). Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk
21
Gambar 2.5LCD (Liquid Crystal Display) 2.6.2 Motor DC (Direct Current)
Motor listrik merupakan perangkat elektro magnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk
memutar impellerpompa, fan ataublower, menggerakan kompresor, mengangkat bahan, dll. Motor listrik digunakan juga dirumah (mixer, bor listrik,fanangin) dan di industri. Motor listrik kadang kala disebut “kuda kerja” nya industri sebab
diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di
industri.
Motor DC (Direct Current) memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada
motor DC (Direct Current) disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada
kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan GGL
(Gaya Gerak Listrik) yang berubah-ubah arah pada setiap setengah putaran,
sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah
membalik fasa tegangan dari gelombang yang mempunyai nilai positif dengan
menggunakan komutator, dengan demikian arus akan berbalik arah dari kumparan
jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana
memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub
Gambar 2.6Motor DC (Direct Current) Sederhana
Sumber : (Renreng, 2012)
2.6.3 IC L298
Driver motor yang digunakan adalah L298 H-bridge. Pada IC (Integrated Circuit) L298 ini tedapat rangkaian H-bridge transistor NPN (Negative Positive Negative). Transistor-transistor ini digunakan sebagai switching yang berfungsi untuk mengatur arah putar motor. Gerbang logika pada rangkaian digunakan
untuk mengaktifkan transistor dari sinyal input masing-masing pin. (Antoni, 2008).
23
Rangkaian H-bridge adalah rangkaian untuk mengendalikan motor yang menghasilkan keluaran putaran motor yang dapat berputar searah jarum jam dan
berlawanan arah jarum jam. (Herisaputra, dkk., 2011).
IC (Integrated Circuit) L298 merupakan IC (Integrated Circuit) buatan SG5 Thomson Microelectron Inc. yang digunakan untuk mengontrol motor. L298
menggunakan prinsip kerja H-Bridge motor drive. Didalam L298 terdapat dual
full bridge sehingga dapat mengontrol 2 motor DC (Direct Current) sekaligus dengan kemampuan arah motor bolak-balik (bidirectional). (Rudiyanto, 2009).
Konfigurasi pin-pin pada L298 dapat dilihat pada gambar 2.8 berikut :
Gambar 2.8Konfigurasi Pin-Pin L298
Sumber : (Herisaputra, dkk., 2011)
2.6.4 Pulse Width Modulation Motor DC (Direct Current)
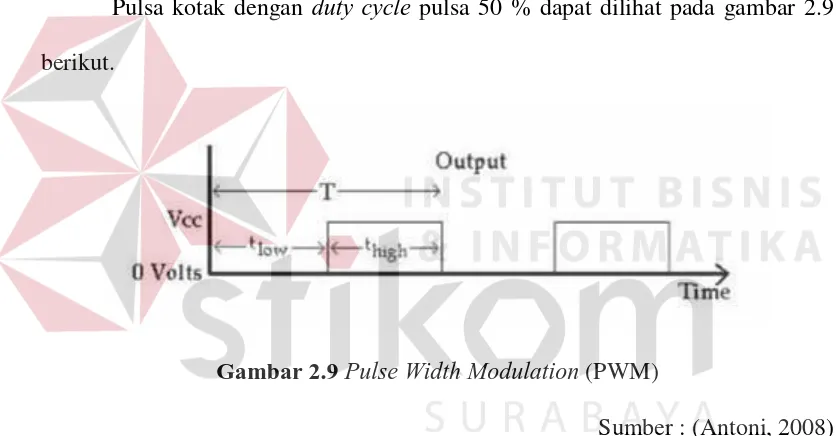
Cara pengaturan kecepatan yang digunakan adalah dengan menggunakan
pengaturan kecepatan motor adalah, pengaturan kecepatan motor dengan cara
merubah-rubah besarnyaduty cyclepulsa.
Pulsa yang berubah-ubah duty cycle-nya inilah yang menentukan kecepatan motor. Besarnya amplitudo dan frekuensi pulsa adalah tetap, sedangkan
besarnya duty cycle berubah-ubah sesuai dengan kecepatan yang diinginkan, semakin besar duty cycle maka semakin cepat kecepatan motor, dan sebaliknya semakin kecil duty cycle maka semakin pelan pula kecepatan motor. (Antoni, 2008)
[image:30.595.93.511.309.527.2]Pulsa kotak dengan duty cycle pulsa 50 % dapat dilihat pada gambar 2.9 berikut.
Gambar 2.9 Pulse Width Modulation(PWM)
25 BAB III
METODE PENELITIAN DAN PERANCANGAN SISTEM
3.1 Model Penelitian
Pada metode penelitian tugas akhir ini dilakukan untuk memberikan
penanda dini kepada ibu bayi ketika bayi yang ada di dalam ayunan terbangun
atau bahkan menangis selain itu juga agar bayi tidak terlalu lama terbangun atau
menangis. Perancangan rancang bangun ini berbasis mikrokontroler yang
memperoleh input dari sensor-sensor yang digunakan, data input akan diolah oleh
mikrokontroler, kemudian akan menentukan hasil output yang sesuai dengan data
input dan hasil proses mikrokontroler.
Sistem rancangan ini akan mulai bekerja jika terdeteksi suara bayi. Ketika
hasil sensor suara terdeteksi suara bayi dari alat akan mengayun secara otomatis
untuk mengayun sementara bayi. Selanjutnya setelah alat mengayun beberapa
saat, sensor amonia akan mendeteksi apakah bayi buang air. Hasil deteksi akan di
sempurnakan dengan sensor kelembaban. Sensor kelembaban untuk mendeteksi
apakah bayi benar-benar buang air atau tidak dengan mendeteksi apakah kasur
ayunan bayi benar-benar basah atau tidak. Alasan digunakan sensor kelembaban
adalah menghindari kesalahan hasil deteksi ketika kasur bayi pada pengayun
kering namun masih terdetaksi amonia pada kasur bayi sehingga dapat
meminimalisir kesalahan hasil deteksi sensor. Dari hasi pengolahan sensor-sensor
pada rancang bangun ini akan diberikan penanda berupa musik ketika bayi
Sensor Suara (Mendeteksi Suara
bayi)
Sensor Kelembaban (Mendeteksi Kondisi Pasti Kasur
Ayunan)
Sensor Gas Amonia (Mendeteksi gas
amonia)
Mikrokontroler
penanda yang diberikan tidak mengganggu bayi serta informasi yang ditampilkan
pada layarLCD (Liquid Crystal Display).
Untuk kondisi bayi buang air, maka hasil diperoleh dari hasil akhir deteksi
sensor kelembaban menyatakan kasur ayunan tidak kering kemudian akan
memberikan informasi pada layar LCD (Liquid Crystal Display)bahwa bayi telah buang air. Selain itu untuk kondisi bayi tidak buang air, maka akan dinyatakan
bayi terbangun karena alasan haus atau alasan lain yang juga akan diberikan
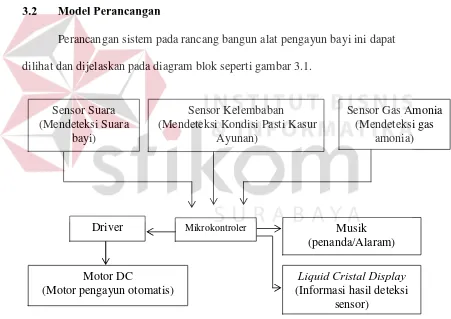
informasi kondisi bayi pada layarLCD (Liquid Crystal Display). 3.2 Model Perancangan
Perancangan sistem pada rancang bangun alat pengayun bayi ini dapat
[image:32.595.91.542.303.622.2]dilihat dan dijelaskan pada diagram blok seperti gambar 3.1.
Gambar 3.1Blok Diagram Perancangan
Dari gambar 3.1 di atas dapat diperjelas bahwa fungsi dari sensor suara
adalah untuk mendeteksi suara bayi, fungsi dari sensor kelembaban adalah
mendeteksi apakah kondisi kasur ayunan bayi kering dan fungsi sensor amonia Driver
motor
Musik (penanda/Alaram)
Motor DC
(Motor pengayun otomatis)
Liquid Cristal Display (Informasi hasil deteksi
27
adalah mendeteksi gas amonia terutama dari kencing bayi. Seluruh sensor
merupakan komponen input dari mikrokontroler yang merupakan kendali kontrol
yang nantinya akan mengontrol kerja dari motor DC (Direct Current) sebagai komponen output untuk mengayun secara otomatis. Selain itu juga memberikan
output musik dan informasi pada layar LCD (Liquid Crystal Display) sesuai dengan kondisi bayi dari hasil pengolahan deteksi sensor-sensor input.
3.3 Perancangan Perangkat Keras
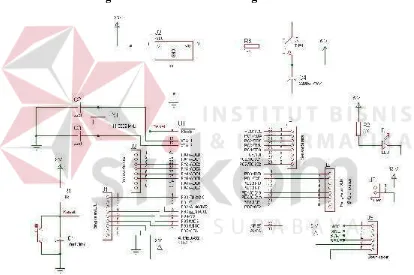
[image:33.595.92.506.291.566.2]3.3.1 Perancangan Minimum Sistem ATMega32
Gambar 3.2Minimum Sistem Mikrokontroler Atmega32
Minimum sistem milrokontroler adalah sistem elektronika sederhana yang
terdiri dari komponen-komponen dasar yang dirangkai menjadi satu karena
dibutuhkan suatu mikrokontoler agar dapat berfungsi dengan baik. Suatu
mikrokontroler membutuhkan dua komponen tambahan selain power untuk dapat
RESET, kedua rangkaian tersebut pada umumnya selalu ada pada minimum
sistem mikrokontroler. Rangkaian tambahan lain yang digunakan pada minimum
sistem terutama yang digunakan pada perancangan ini adalah rangkaian power,
rankaian led indikator dan konektor ISP (In System Chip Program) untuk mengunduh (download) program ke mikrokontroler. Bagian inti yaitu mikrokontroler yang digunakan adalah ATMega 32 yang merupakan otak dari
minimum sistem. Pengujian terhadap Minimum Sistem dilakukan dengan
mendownload progam pada mikrokontroler, jika proses download program berhasil maka Minimum Sistem dapat bekerja dengan baik dan dapat digunakan
pada perancangan.
a. Kristal Oscillator (XTAL)
Gambar 3.3Rangkaian KristalOscillatorpada Minimum Sistem
Kristal Oscillator adalah bagian dari rangkaian minimum sistem diumpamakan seperti jantung pada manusia yang memompa darah dan seluruh
kandungannya. Namun kerja kristal pada minimum sistem berguna untuk
memompa data yaitu bersifat timer (semacam clock)/pulsa digital oleh karena itu
kristal memiliki sebuah frekuensi dengan satuan MHz (MegaHertz).
Karena kristaloscillatordiumpamakan sebagai jantung, maka komponen ini adalah bagian yang paling penting pada rangkaian minimum sistem
milkrokontroler agar mikrokontroler dapat digunakan. Sebenarnya pada
29
oscillator internal, namun oscillator internal ini besar frekuensi maksimalnya hanya 8 MHz (MegaHertz) sehingga jika ingin menggunakan frekuensi diatas 8 Mhz (MegaHertz) harus menggunakan oscillator external. Rangkaian oscillator externalini terdiri dari sebuah kristal dan dua buah kapasitor.
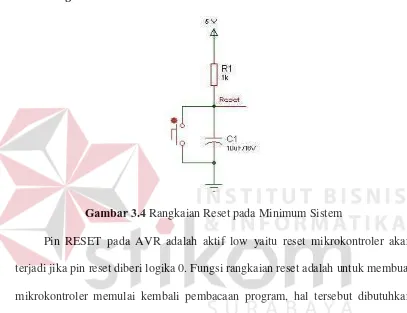
[image:35.595.98.505.209.522.2]b. Rangkaian Reset
Gambar 3.4Rangkaian Reset pada Minimum Sistem
Pin RESET pada AVR adalah aktif low yaitu reset mikrokontroler akan
terjadi jika pin reset diberi logika 0. Fungsi rangkaian reset adalah untuk membuat
mikrokontroler memulai kembali pembacaan program, hal tersebut dibutuhkan
pada saat mikrokontroler mengalami ganguan dalam meng-eksekusi program.
Dengan sistem kerja membuat semua pin dalam kondisi tri-state (High Impedance) kecuali pin XTAL, menginisialisasi register I/O, dan meng-set counterprogram kembali ke NOL.
Resistor pada rangkaian reset adalah sebagai pull-up eksternal yang
digunakan untuk menjaga agar pin reset tidak berlogika 0 secara tidak sengaja.
Kapasitor pada rangkaian yang terhubung dengan pin reset dan ground berfungsi
c. Rangkaian Inidikator
Gambar 3.5Rangkaian Indikator pada Minimum Sistem
Indikator pada rangkaian minimum sistem menggunakan led yang berfungsi
untuk mengetahui status alat/detektor. Dari penanda led indikator dapat diketahui
apakah rangkaian mikrokontroler telah terhubung dengan baik untuk menghindari
kegagalan dalam proses pengiriman data. Pada rangkaian indikator juga
dilengkapi dengan komponen resistor yang berfungsi untuk menurunkan tegangan
dari input tegangan 5 Volt, komponen ini dibutuhkan karena led memiliki
tegangan input sebesar 3 Volt, led akan rusak jika menerima tegangan lebih dari 3
Volt.
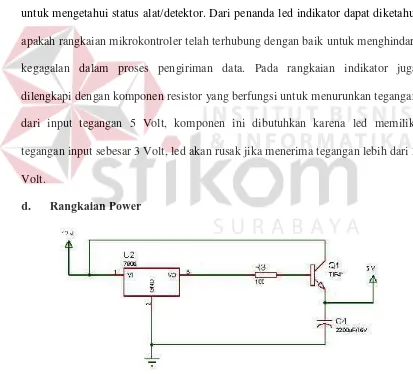
d. Rangkaian Power
Gambar 3.6Rangkaian Power pada Minimum Sistem
Pada rangkaian minimum sistem juga ditambahkan rangkaian power
31
kelebihan tegangan tidak melebihi 5,5 Volt. Hal ini bertujuan agar mikrokontroler
ATMega32 tidak rusak, karena ATMega32 bekerja pada tegangan input 4,5 –5,5
Volt. Dengan sistem kerja sumber tegangan input dari batrai 12 Volt masuk ke
transistor, tegangan akan diturunkan menjadi 5,5 Volt dan arus 1 Ampere dengan
transistor 7806.
Output dari transistor masuk ke resistor untuk mengurangi nilai arusnya,
selanjutnya arus masuk ke input kaki base Tip 41. Pada kaki collector Tip 41 dihubungkan ke tegangan 12 Volt. Kemudian kaki emitter akan menghasilkan output 5 Volt dan menaikkan arus sebesar 4 Ampere. Kapasitor di rangkaian
power berguna untuk menyimpan daya saat baterai dari sumber tegangan mati.
e. Konektor ISP (In- System chip Program)
In-System chip Program(ISP) adalah sebuah fitur bagi mikrokontroler agar dapat di download dengan program tanpa harus mencabut mikrokontroler dari sistemnya. Sehingga mikrokontroler tetap pada kedududukannya dan
dihubungkan dengan ISP (In-System chip Program) untuk melakukan proses download. Begitu pula saat memutuskan hubungan antara downloader dan mikrokontroler, cukup dengan memutuskan kabel penguhubung antara
downloaderdengan mikrokontroler dari sistemnya.
Untuk melakukan proses download program, yaitu file dengan extensi “.hex” digunakan perangkat bantu ATMEL USB ISP (USBasp) seperti pada
gambar 3.7 yang akan dihubungkan denganportUSB (Universal Serial Bus) pada komputer. Sebelum downloader dapat digunakan perlu dilakukan instalasi driver terlebih dahulu. Kemudian perlu dilakukan instalasi aplikasi Khazama AVR
Gambar 3.7 DownloaderATMEL USB ISP (USBasp)
ATMEL USB ISP merupakanin-circuit programmer untuk mikrokontroler Atmel AVR (Alf and vegard’s Risc processor). Rangkaiannya menggunakan ATMega48 atau ATMega8 dan beberapa komponen pasif lainnya. Downloader ini hanya menggunakan sebuah penggerak USB (Universal Serial Bus) firmware, tidak memerlukan pengontrol USB (Universal Serial Bus) khusus. Fitur pada ATMEL USB ISP (USBasp) antara lain bisa digunakan untuk berbagai macam
platform, tidak memerlukan pengontrol atau komponen SMD (Surface Mount Device) khusus, kecepatan pemrograman bisa mencapai 5 kilobyte/detik dan Opsi SCK (Serial Clock) untuk mendukung mikrokontroler target yang berkecepatan rendah (< 1.5 MegaHertz). Konfigurasi pinout terdapat pada gambar 3.8 dan keterangan daridownloaderterdapat pada Tabel 3.1.
33
Tabel 3.1Tabel KeteranganPinoutATMEL USB ISP (USBasp)
No Nama No PIN I/O Keterangan
1. VTG 2 - Catu daya dari project
board (2.7–5.5 V)
2. GND 4,6,8,10 - Titik referensi
3. NC 3 - Tidak digunakan
4. MOSI 1 Output
Command dan data dari USBasp ke target
AVR
5. MISO 9 Input Data dari target AVR
ke USBasp
6. SCK 7 Output Serial clock
7. RESET 5 Output Fungsi Reset
3.3.2 Perancangan Sensor Kelembaban
Sensor yang digunakan pada perancangan ini menggunakan sensor
DHT11. Pada perancangan sensor kelembaban akan digunakan port pin PORTD
pada mikrokontroler. Tepatnya pada pin PORTD.3 pada mikrokontroler dengan
diberi rangkaianpull upantara sensor dan PORTD.3.
DHT11 termasuk ke dalam kategori sensor yang mudah digunakan, baik
dalam hal protokol komunikasi maupun wiring hardware. DHT11 hanya membutuhkan 1 jalur pertukaran data dengan mikrokontroler (one-wire interface), dimana proses pertukaran data tersebut dilakukan menggunakan metode PWM (Pulse Width Modulation) sederhana.
Proses pengambilan data dari sensor DHT11 dilakukan dengan melakukan
perulangan dari pengambilan data tiap bit. Pengambilan data tiap bit ini akan
dikelompokkan menjadi 5 segmen. Perulangan dari pengambilan data tiap bit ini
sebanyak 8 kali sesuai dengan jumlah bit pada 1 byte. 1 segmen/ 1 byte dari data
yang diperoleh berasal dari penjumlahan bit 0 dan 1 yang dihasilkan. Nilai bit
delay respon 70 µs. Data segmen yang di peroleh yang pertama menghasilkan nilai integer kelembaban, kedua menghasilkan nilai desimal kelembaban, ketiga
menghasilkan nilai integer suhu, keempat menghasilkan nilai desimal suhu dan
kelima menghasilkan nilai total kelembaban dan suhu. Maka perulangan
pengambilan data yang dilakukan adalah 8 kali untuk mengambil data per bit pada
tiap segmen yaitu 8 perulangan dalam 5 perulangan pengambilan data. Sehingga
terdapat 40 data bit yang diperoleh dari poses pengambilan data.
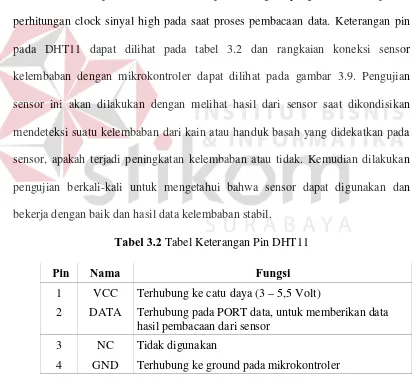
Hasil dari pembacaan sudah berupa data digital yang berasal dari proses
perhitungan clock sinyal high pada saat proses pembacaan data. Keterangan pin
pada DHT11 dapat dilihat pada tabel 3.2 dan rangkaian koneksi sensor
kelembaban dengan mikrokontroler dapat dilihat pada gambar 3.9. Pengujian
sensor ini akan dilakukan dengan melihat hasil dari sensor saat dikondisikan
mendeteksi suatu kelembaban dari kain atau handuk basah yang didekatkan pada
sensor, apakah terjadi peningkatan kelembaban atau tidak. Kemudian dilakukan
pengujian berkali-kali untuk mengetahui bahwa sensor dapat digunakan dan
[image:40.595.100.518.293.678.2]bekerja dengan baik dan hasil data kelembaban stabil.
Tabel 3.2Tabel Keterangan Pin DHT11
Pin Nama Fungsi
1 VCC Terhubung ke catu daya (3–5,5 Volt)
2 DATA Terhubung pada PORT data, untuk memberikan data hasil pembacaan dari sensor
3 NC Tidak digunakan
35
Gambar 3.9Rangkaian Koneksi Sensor Kelembaban Dengan Mikrokontroler 3.3.3 Perancangan Sensor Amonia
Pada perancangan ini digunakan sensor MQ 137 yang merupakan sensor
analog, sehingga memiliki nilai output berupa sinyal analog. Untuk sensor analog
akan digunakan port ADC (Analog to Digital Converter) pada mikrokontroler, yaitu port A pada mikrokontroler. Dengan menggunakan port ADC (Analog to Digital Converter) maka nilai dari kadar amonia yang ingin dideteksi akan diketahui nilainya, karena data yang akan ditampilkan berupa nilai digital. Satuan
nilai kadar amonia yang dideteksi adalah ppm (part per milion). Untuk rangkaian
Circuit Drive MQ 137 dapat dilihat pada gambar 3.10. Pengujian sensor ini akan dilakukan dengan melihat hasil penguapan gas amonia dengan membedakan
kondisi saat terpapar atau tidak terpapar oleh bau amonia, serta konsistensi sensor
dengan pengujian berkali-kali untuk mengetahui bahwa sensor dapat digunakan
Gambar 3.10RangkaianCircuit DriveMQ 137 3.3.4 Perancangan Sensor Suara
Gambar 3.11Rangkaian Sensor Suara
Gambar 3.11 merupakan perancangan hubungan antara port sensor dengan
mikrokontroler. Sensor suara dapat bekerja dengan tegangan masuk antara 4 Volt
DC (Direct Current) sampai dengan 6 Volt DC (Direct Current). Tegangan masukan telah disesuaikan dengan spesifikasi tegangan sensor. Sensor suara
memiliki 3 pin yang dihubungkan pada mikrokontroler. Pin pada sensor berupa
input tegangan 5 Volt DC (Direct Current), Ground dan Output. Output pada sensor dihubungkan pada mikrokontroler yang digunakan sebagai input data dari
sensor. Chip utama pada sensor menggunakan LM393 dengan perangkat input
adalah mic kondensator. Sensor bekerja dengan sinyal aktif low, jadi ketika
mikrokontroler mendapat logika 0 dari output sensor maka dapat dikatakan suara
input dapat terdeteksi. Sedangkan ketika mikrokontroler mendapat logika 1 atau
37
Jarak maksimal penerimaan input suara adalah 0,5 meter atau 50 cm. Gambar 3.12
adalah sensor yag digunakan pada perancangan.
Gambar 3.12Sensor Suara
Untuk mengetahui rangkaian sensor suara bekerja dengan baik dan dapat
digunakan, secara sederhana dapat dilakukan dengan melihat led pada modul
sensor menyala atau tidak. Ketika terdapat input suara dan terdeteksi oleh sensor
maka led pada modul sensor akan menyala,sedangkan ketika input suara tidak
terdeteksi maka led tidak menyala. Selain itu akan dilakukan pengujian terhadap
jarak input sensor sehingga dapat diketahui jarak maksimal input suara yang
nantinya berguna dalam tata letak perancangan alat yang juga dilakukan
pengukuran desibel dari suara input.
3.3.5 Perancangan LCD (Liquid Cristal Display)
LCD (Liquid Cristal Display)yang digunakan adalah LCD (Liquid Cristal Display) dengan karakter 16x2 dengan fungsi untuk menampilkan informasi yang dibutuhkan pada perancangan alat. Pada perancangan digunakan port B untuk
(Liquid Cristal Display) dapat menampilkan kalimat sesuai dengan instruksi program, maka dapat dikatakan LCD (Liquid Cristal Display) dapat digunakan dan bekerja dengan baik.
Gambar 3.13Rangkaian LCD (Liquid Cristal Display) 3.3.6 Perancangan Motor Driver
Motor driver yang digunakan pada perancangan ini adalah rangkaian
motor driver dengan IC (Integrated Circuit) L298. IC (Integrated Circuit) driver L298 memiliki kemampuan menggerakan motor DC (Direct Current) sampai arus 4 Ampere dan tegangan maksimum 12 Volt. Pada rangkaian pin Enable A dan B untuk mengendalikan kecepatan motor yang diinputkan dari minimum sistem
berupa sinyal PWM (Pulse Width Modulation). Input 1 dan 2 pada rangkaian berguna sebagai pengendali arah putar, yaitu searah atau berlawanan arah jarum
jam sesuai dengan cara kerja motor yang digunakan pada perancangan. Kemudian
output 1 dan 2 pada motor driver dihubungkan pada rangkaian diode bridge
39
DC (Direct Current). H-Bridge driver motor DC (Direct Current) L298 masing -masing dapat mengantarkan arus 2 Ampere. Namun, dalam penggunaannya,
H-Bridge driver motor DC (Direct Current) L298 hanya diggunakan 1 buah H-Bridge driver motor DC (Direct Current) L298 karena hanya membutuhkan 2 buah output untuk mengendalikan 1 buah motor DC (Direct Current). Pada gambar 3.14 dapat dilihat rangkaian motor driver yang digunakan pada
perancangan.
Gambar 3.14Rangkaian Motor Driver 3.3.7 Perancangan Output Musik/Alaram
Pada perancangan ini output musik digunakan sebagai penanda bahwa
bayi telah terbangun. Musik ini akan diaktifkan jika motor pengayun menyala
yang menandakan bahwa bayi terbangun. Musik akan terus diaktifkan jika sistem
masih berjalan. Kemudian musik akan nonaktif jika selesai melakukan deteksi
semua sensor dan kemudian sensor suara tidak mendeteksi inputan suara yang
menandakan tidak ada input suara bayi. Jika motor perngayun berhenti bekerja
melakukan proses kerja. Pada gambar 3.15 dapat dilihat rangkaian output musik
yang digunakan pada perancangan.
Gambar 3.15Rangkaian Output Musik 3.4 Perancangan Mekanik
Selain perancangan hardware, dilakukan juga perancangan mekanik dari rancang bangun yang tentunya berguna untuk pengujian keseluruhan sistem pada
kondisi yang dibutuhkan sesuai dengan ide perancangan. Karena ini berhubungan
dengan pengembangan teknologi terutama pada perlengkapan bayi. Pada gambar
3.16 berikut merupakan mekanik dari keseluruhan sistem rancang bangun yang
berasal dari kerangka asli ayunan bayi (baby swing).
41
Mekanik dari rancang bangun menggunakan kerangka ayunan bayi
otomatis. Ayunan bayi otomatis ini memiliki komponen rangkaian mikrokontroler
ayunan otomatis, sensor rotary, motor DC (Direct Current) dan speaker. Karena terdapat komponen motor DC (Direct Current) pada ayunan, maka motor DC pada ayunan dapat dimanfaatkan dalam pembuatan perancangan. Ayunan bayi
otomatis ini untuk mengatur kecepatannya menggunakan rangkaian
mikrokontroler yang sudah terintegrasi dan dalam hal tingkat kecepatan motor
digunakan sensor rotary yang diawali dengan input tombol sesuai dengan tingkat
kecepatan yang nantinya akan diolah pada mikrokontroler yang telah terpasang
[image:47.595.95.506.319.540.2]pada ayunan otomatis dalam pengoperasiannya.
Gambar 3.17Design Asli Ayunan Bayi
Dalam pembuatan rancang bangun, penelis hanya memanfaatkan motor
pada mekanik dari ayunan bayi otomatis tersebut yang nantinya akan
diintegrasikan dengan sistem mikrokontroler ATMega32 yang telah dirancang
oleh penulis. Gambar 3.18 berikut menunjukkan motor pada mekanik yang
Gambar 3.18Motor Pada Ayunan Bayi
Motor DC ini terletak pada bagian sisi kanan penyangga bagian atas yang
dapat dilihat dari gambar 3.16. Kemudian sisi yang lainnya dari ayunan bayi
menggunakan as agar bagian sisi yang tidak terdapat motor DC (Direct Current)/motor pengayun dapat ikut bergerak sama dengan arah ayun dari sisi bagian yang terdapat motor DC (Direct Current)/motor pengayun.
Gambar 3.19Bagian As Pada Sisi Penyangga Atas Tanpa Motor DC (Direct Current) Selanjutnya untuk meyempurnakan gerak dari ayunan maka digunakan
penghubung yang sudah terdapat pada mekanik yang dimanfaatkan sekaligus
sebagai tempat menggantung mainan bayi. Lengkungan yang digunakan sebagai
penghubung antara penyangga atas sisi kanan dan sisi kiri dapat dilihat secara
jelas pada gambar 3.20. Lengkungan tersebut berguna untuk menyamakan gerak
penyangga sisi kanan dan sisi kiri agar dapat benar-benar bergerak bersamaan
43
Gambar 3.20Penghubung Sisi Kanan & Kiri Penyangga Atas Dari bagian mekanik yang telah dijelaskan, akan dilakukan perancangan
sistem pada mekanik alat pengayun bayi yang telah ada.
3.4.1 Perancangan Motor Pengayun
Pada perancangan motor pengayun digunakan motor DC (Direct Current) yang telah ada pada alat pengayun yang menggunakan rangkaian motor driver
L298 untuk menjalankan motor. Rangkaian motor driver L298 ini akan
dihubungkan dengan mikrokontroler ATMega32. Sistem kerja dari rancangan
diawali dari kontrol mikrokontroler yang memberikan nilai PWM (Pulse Width Modulation) dan direction pada rangkaian motor driver. Dari rangkaian motor driver L298 yang mendapat input 12 Volt dan ground pada port input power.
Kemudian pada port input L298 yang dihubungkan dengan mikrokontroler adalah
input direction, PWM (Pulse Width Modulation), 5 Volt dan Ground. Selanjutnya pada output rangkaian motor driver dari rangkaian H-Bridge dihubungkan pada
motor DC (Direct Current)/motor pengayun yang nantinya akan bekerja berdasarkan kontrol dari mikrokontroler. Untuk pengaturan besar PWM (Pulse Width Modulation) untuk perancangan software dapat dilakukan dengan pengujian langsung yang akan disesuaikan dengan berat beban pada alat
Tabel 3.3TabelAllocation ListMotor Driver
No Alamat IN/OUT Keterangan
1. PORTD.0 Output Direction
2. PORTD.1 Output Direction
3. PORTD.4 (OCR1B) Output PWM
4. VCC VCC 5 V
5. GND Ground Ground
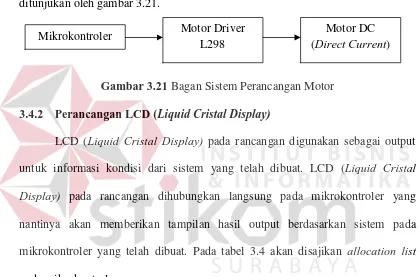
Untuk gambaran sistem kerja dari rancangan dapat dilihat pada bagan yang
[image:50.595.94.514.252.529.2]ditunjukan oleh gambar 3.21.
Gambar 3.21Bagan Sistem Perancangan Motor 3.4.2 Perancangan LCD (Liquid Cristal Display)
LCD (Liquid Cristal Display) pada rancangan digunakan sebagai output untuk informasi kondisi dari sistem yang telah dibuat. LCD (Liquid Cristal Display) pada rancangan dihubungkan langsung pada mikrokontroler yang nantinya akan memberikan tampilan hasil output berdasarkan sistem pada
mikrokontroler yang telah dibuat. Pada tabel 3.4 akan disajikan allocation list pada mikrokontroler.
Tabel 3.4TabelAllocation ListLCD (Liquid Cristal Display)
No Alamat IN/OUT Keterangan
1. PORTB.0 Output RS
2. PORTB.1 Output RD
3. PORTB.2 Output EN
4. PORTB.4 Output D4
5. PORTB.5 Output D5
6. PORTB.6 Output D6
7. PORTB.7 Output D7
8. VCC VCC 5 V
9. GND Ground Ground
Mikrokontroler Motor Driver L298
45
Pada rancangan LCD (Liquid Cristal Display) akan diletakan pada bagian penyangga atas ayunan dengan tujuan agar infomasi yang di tampikan pada LCD
(Liquid Cristal Display)mudah untuk diketahui. 3.4.3 Perancangan Sensor Suara
Sensor suara adalah sensor yang digunakan sebagai input pada rancangan
untuk mendeteksi apakah terdeteksi suara bayi yang terbangun. Input sensor ini
nantinya sebagai input awal untuk menentukan kerja motor dan komponen lain
yang digunakan pada rancangan oleh mikrokontroler. Sensor ini juga digunakan
sebagai penentu apakah sistem yang telah berjalan akan dilanjutkan atau berhenti
karena sensor tidak mendeteksi adanya input suara. Pada tabel 3.5 akan disajikan
allocation listpada mikrokontroler.
Tabel 3.5TabelAllocation ListSensor Suara
No Alamat IN/OUT Keterangan
1. PORTC.2 Input Data Input
2. VCC VCC 5 V
3. GND Ground Ground
Pada rancangan sensor suara akan diletakan dekat dengan kasur ayunan
tepatnya dekat dengan sisi kepala bayi yang bertujuan agar suara dari bayi yang
terbangun dapat benar-benar terdeteksi dan memberikan input sesuai dengan
kondisi yang diharapkan.
3.4.4 Perancangan Sensor Gas Amonia
Sensor gas amonia adalah sensor pada rancangan yang digunakan sebagai
input untuk mendeteksi bau amonia yang berasal dari kencing bayi. Sensor
amonia akan bekerja untuk menganalisa hasil kadar amonia setelah sistem bekerja
memperoleh nilai ADC (Analog to Digital Converter) dari hasil deteksi sensor, sistem akan berlanjut untuk mengaktifkan sensor kelembaban. Hasil dari analisa
sensor amonia yang dilanjutkan dengan hasil analisa sensor kelembaban akan
memberikan informasi kondisi dari alasan bayi terbangun berdasarkan hasil
deteksi sensor-sensor dan analisa hasil dari mikrokontroler.
Pada mikokontroler output sensor di inputkan pada PORT A, karena
sensor yang di gunakan adalah sensor MQ-137 yang merupakan sensor dengan
output analog. Alasan penggunaan PORT A adalah untuk mengubah hasil deteksi
sensor menjadi data digital, karena PORT A merupakan PORT ADC (Analog to Digital Converter) pada mikrokontroler. Hasil dari pembacaan ADC (Analog to Digital Converter) ini akan menjadi dasar kondisi untuk menentukan apakah sensor gas amonia mendeteksi bau amonia pada ayunan bayi atau tidak. Pada
rancangan sensor gas amonia akan diletakan pada bagian bawah kasur ayunan
dekat dengan bagian ompol bayi namun bagian yang tidak sampai mengenai
ompol bayi agar sensor tidak terkena air, sensor akan berkurang sensitifitasnya
jika terkena air. Penempatan sensor pada tempat itu bertujuan agar sensor dapat
benar-benar mendeteksi bau amonia yang berasal dari kencing bayi.
3.4.5 Perancangan Sensor Kelembaban
Sensor kelembaban pada rancangan digunakan sebagai input untuk
menentukan hasil pasti dari hasil deteksi sensor gas amonia. Sensor ini digunakan
dengan tujuan memastikan bahwa tempat bayi pada ayunan benar-benar basah
atau tidak. Sensor ini akan memberikan kondisi pasti agar tidak terjadi kesalahan
hasil saat sensor gas amonia mendeteksi bau amonia namun tempat bayi dalam
47
informasikan pada layar LCD (Liquid Cristal Display). Sensor kelembaban pada rancangan menggunakan sensor DHT11 yang merupakan sensor modul yang
sudah dapat langsung terintegrasi dengan mikrokontroler. Pada port output dari
sensor terdapat 4 pin, yaitu pin VCC, pin DATA, pin NC dan pin GND. Namun
pada perancangan hanya menggunakan 3 pin, yaitu VCC, DATA dan GND. Pin
DATA akan dihubungkan pada pin mikrokontroler yang telah diberi rangkaian
pull up. Pembacaan data berasal dari perhitungan nilai clock saat pembacaan tiap
bit data. Pada perancangan akan digunakan PORTD.3 pada mikrokontroler.
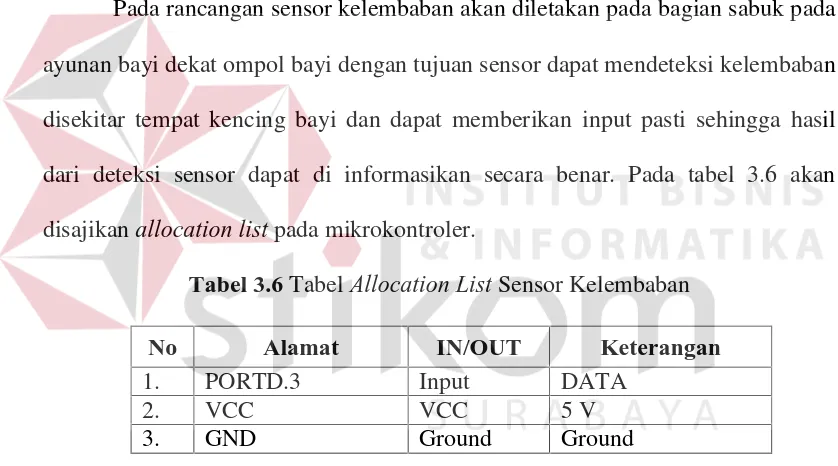
Pada rancangan sensor kelembaban akan diletakan pada bagian sabuk pada
ayunan bayi dekat ompol bayi dengan tujuan sensor dapat mendeteksi kelembaban
disekitar tempat kencing bayi dan dapat memberikan input pasti sehingga hasil
dari deteksi sensor dapat di informasikan secara benar. Pada tabel 3.6 akan
[image:53.595.92.511.310.543.2]disajikanallocation listpada mikrokontroler.
Tabel 3.6TabelAllocation ListSensor Kelembaban
No Alamat IN/OUT Keterangan
1. PORTD.3 Input DATA
2. VCC VCC 5 V
3. GND Ground Ground
3.4.6 Perancangan Output Musik/Alaram
Musik pada rancangan merupakan komponen output yang berfungsi untuk
memberikan penanda bahwa bayi terbangun. Rangkaian ini akan aktif jika sistem
mulai berjalan yang ditandai dengan adanya input suara yang terdeteksi oleh
sensor suara kemudian mengaktifkan motor pengayun pertanda bayi terbangun.
Musik akan terus aktif sampai seluruh sensor selesai mendeteksi hingga kembali
suara yang terdeteksi maka motor pengayun dan musik akan nonaktif pertanda
sistem telah berhenti berjalan. Pada gambar 3.22 berikut merupakan rangkaian
output musik yang digunakan pada perancangan.
Gambar 3.22Rangkaian Musik
Pada rangkaian mikrokontroler output musik dihubungkan pada PORTC.6
dan PORTC.7. Pada PORTC.6 akan dijadikan sebagai input positif dan pada
PORTC.7 akan dijadikan input negatif pada rangkaian IC (Integrated Circuit) musik. Komponen speaker serta rangkaian IC (Integrated Circuit) musik akan diletakan pada bagian penyangga atas ayunan dengan tujuan agar hasil suara dari
speaker dapat terdengar dengan jelas. Pada tabel 3.7 berikut akan disajikan
[image:54.595.96.510.308.592.2]allocation listpada mikrokontroler.
Tabel 3.7TabelAllocation ListRangkaian Musik
No Alamat IN/OUT Keterangan
1. PORTC.6 Output Input Positif
2. PORTC.7 Output Input Negatif
Untuk gambaran sistem kerja dari rancangan dapat dilihat pada bagan yang
ditunjukan oleh gambar 3.23.
Gambar 3.23Bagan Sistem Perancangan Output Musik Mikrokontroler IC (Integrated
49
3.5 Perancangan Perangkat Lunak
3.5.1 Setting Wizard Pada CodeVision AVR
Sebelum membuat listing program pada CodeVision AVR dilakukan
pembuatan project baru untuk chip tipe ATMega. Setting awal ini dilakukan untuk
langkah awal dalam penulisan listing program sebelum membuat listing program
untuk proses pada bagian main. Setting wizard yang dilakukan, disesuaikan
dengan kebutuhan komponen yang digunakan pada perancangan. Setting
dilakukan pada bagian :
1. Chip
Setting pada bagian chip dilakukan pada pengaturan chip yang digunakan dan
clock yang digunakan pada rangkaian minimum sistem. Pada perancangan
[image:55.595.92.508.299.643.2]digunakan chip ATMega32 dan clock 11,0592 MegaHertz. Setting wizard chip dapat dilihat pada gambar 3.24.
Gambar 3.24Setting Chip Pada CodeVision AVR 2. Port
Setting pada bagian port dilakukan hanya pada PORT C dari setting awal
wizard. Dengan mengganti data direction pada PORTC.6 dan PORTC.7
komponen rangkaian musik. Setting wizard PORTC dapat dilihat pada
[image:56.595.95.524.139.508.2]gambar 3.25.
Gambar 3.25Setting PORTC Pada CodeVision AVR 3. Timer
Setting pada bagian timer dilakukan hanya pada timer 0 dan timer 1. Pada
timer 0 setting dilakukan hanya pada clock value, gunakan clock value dengan nilai yang paling besar pada rancangan menggunakan nilai
110.592,200 kiloHertz. Setting ini berguna untuk menghitung nilai clock sinyal high dari sensor kelembaban, digunakan nilai clok paling besar agar
jarak anatara nilai clock bernilai 1 dan 0 cukup jauh. Setting wizard timer 0
51
Gambar 3.26Setting Timer 0 Pada CodeVision AVR
Pada timer 1 lakukan setting pada clock value, atur clock yang di butuhkan. Kemudian setting mode menjadi “Ph. Correct PWM top=0x00FF” dan OutA
beserta OutB menjadi “Non-Inv”. Setting ini berguna untuk pengaturan
PWM (Pulse Width Modulation)