i ABSTRAK
Kemajuan teknologi di bidang kedirgantaraan di dunia sangatlah pesat. Contohnya adalah roket. Roket merupakan wahana dirgantara yang banyak memiliki fungsi, di antaranya sebagai pengorbit satelit dan pembawa muatan roket (payload). Pada penelitian ini payload dirancang agar dapat melakukan penginderaan dinamik (attitude monitoring) dan dapat melakukan pemetaan (surveillance). Payload ini menggunakan mikrokontroler basic stamp 2p40 sebagai control unit, MMA7260Q untuk mengetahui percepatan gravitasi yang dialami payload, modul kamera CMUcam3 untuk melakukan pengambilan gambar, serta mikro switch sebagai sensor separasi. Hasil pengukuran sensor-sensor tersebut akan dikirim ke komputer melalui jalur udara (wireless) dengan menggunakan modul radio HwaWei YS-1020UB.Hasil pengujian menunjukkan semua sensor dan kamera dapat bekerja dengan baik,Tingkat keberhasilan pengujian sensor percepatan dengan melakukan tiga kali pengujian yaitu g-force, g-shock, dan vibrasi yaitu 100%. Data yang dikirimkan tidak mengalami cacat dan tidak terputus selama pengujian dilakukan. Pengujian pemetaan (surveillance) dilakukan dengan melakukan pengambilan gambar dengan berbagai kondisi. Pengambilan gambar dinyatakan berhasil apabila dapat melakukan pengiriman gambar dengan resolusi 200x200 pixel B/W. Tingkat keberhasilan pengambilan gambar, yaitu 100% berhasil dimana dalam pengambilan gambar tersebut data yang dikirim tidak cacat dan bergeser. Dalam keadaan cuaca cerah perlu dipasang sebuah filter pada lensa kamera agar cahaya dari sinar matahari tidak terlalu banyak yang terserap.
ii ABSTRACT
Advances in the field of aerospace technology in the world is leaps and bounds. An example is the rocket. Aerospace rocket is a vehicle that has many functions, such as the orbiter satellite and carrier rocket payload. In this research, the payload is designed to perform dynamic sensing (Attitude monitoring) and can do the mapping (surveillance). The payload uses a microcontroller basic stamp 2p40 as a control unit, MMA7260Q to know the acceleration of gravity experienced by the payload, CMUcam3 camera modules to perform image capture, as well as micro-switches as sensors separation. The results of measurements of the sensors is sent to the computer through the air (wireless) using the radio module YS-1020UB HwaWei. Test results show all the sensors and cameras can work well, the success rate of acceleration sensors testing by doing three times the test is g-force, g-shock, and vibration that is 100%. Transmitted data do not have disabilities and are not isconnected during the test performed. Testing mapping (surveillance) is done by shooting with a variety of conditions. Shooting declared a success if it can make sending pictures with a resolution of 200x200 pixels B / W. The success rate of shooting, that is 100% successful in shooting where the data sent is not disabled and shifted. In sunny weather conditions need to be installed a filter on the camera lens so that light from the sun is not too much is absorbed. .
iii
KATA PENGANTAR
Dengan menyebut nama Allah Yang Maha Pengasih lagi Maha Penyayang, puji dan syukur penulis panjatkan kehadirat Allah Subhannahu Wata’ala yang telah melimpahkan rahmat serta hidayah-Nya kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir yang diberi judul ”Perancangan Attitude Monitoring and Surveillance Payload”. Adapun maksud dari penyusunan tugas akhir ini adalah bertujuan untuk menyelesaikan studi program S1 dan merupakan salah satu syarat dalam menempuh ujian sarjana program studi Teknik Elektro Universitas Komputer Indonesia (UNIKOM) Bandung.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kata sempurna, dikarenakan keterbatasan penulis, baik dalam penyajian materi, maupun dalam sistematika penulisan, sumber bacaan, pengetahuan dan pengalaman penulis. Walaupun demikian, penulis telah berusaha dan mencoba memberikan karya tulis yang bermanfaat bagi penulis khusunya dan bagi pembaca umumnya.
Pada kesempatan ini, tidak lupa penulis ucapkan terimakasih kepada semua pihak yang telah membantu kelancaran dalam penyelesaian laporan ini, terutama kepada : UNIKOM Bandung dan pembimbing penulis tugas akhir ini.
iv
5. Bapak dan Ibu Dosen Jurusan Teknik Elektro UNIKOM Bandung yang telah membekali ilmu pengetahuan kepada penulis selama menuntut ilmu di UNIKOM Bandung.
6. Ibu Mery selaku sekretaris Jurusan Program Studi Teknik Elektro UNIKOM Bandung.
7. Keluarga besar Divisi Roket UNIKOM tim Arjuna S4D dan RTS X2, terima kasih atas kebersamaannya selama ini.
8. Kedua Orang Tuaku serta Keluargaku yang selalu memberikan dorongan moril dan materi serta do’a kepada penulis selama mengikuti perkuliahan di UNIKOM Bandung.
9. Keluarga besar laboratotium kendali dan sistem cerdas, Dedi, Aulia, Syukri, Deco, Rayung, Ervin, Leo yang menjadi keluarga penulis di lab dalam suka dan duka selama mengikuti perkuliahan di Jurusan Teknik Elektro UNIKOM Bandung.
10.My beloved girl, YULIANI yang telah mendukung dan memberikan support agar cepat lulus.
Akhir kata dengan kerendahan hati, penulis memanjatkan do’a kehadirat Allah Subhanahu Wata’ala semoaga amal dan baik budi yang telah mereka berikan kepada penulis mendapat paha dari-Nya. Amin.
Bandung, Agustus 2011
BAB I PENDAHULUAN
1.1 Latar Belakang
Kemajuan teknologi di bidang kedirgantaraan di dunia sangatlah pesat.
Contohnya adalah roket. Roket merupakan wahana dirgantara yang banyak memiliki
fungsi, di antaranya sebagai pengorbit satelit dan pembawa muatan roket (payload). Indonesia sebagai negara yang mempunyai batas wilayah yang sangat luas sudah
seharusnya bisa menguasai teknologi roket tersebut. Suatu negara yang dapat
menguasai teknologi roket maka Negara tersebut akan disegani oleh Negara lainnya.
Roket terdiri dari bermacam – macam jenis. Ukuran dan kegunaan roket
berbeda pula. LAPAN (Lembanga Penerbangan dan Antariksa) merupakan
satu-satunya lembaga di Indonesia yang diperbolehkan untuk membuat roket. Pihak diluar
LAPAN boleh mempelajari tentang roket, namun tidak boleh membuat roket. Muatan
roket (payload) merupakan suatu bagian dari roket yang diperbolehkan untuk dipelajari dan membuatnya.
Muatan roket (payload) mempunyai berbagai macam fungsi, di antaranya adalah sebagai pengukur Co2, pengukur suhu dan kelembaban, atau pengukuran
lainnya. Fungsi lainnya adalah sebagai pemetaan suatu wilayah atau bisa juga sebagai
surveillance.
tugas akhir. Sesuai dengan topik yang diangkat, maka penulis memberi judul pada tugas akhir ini, yaitu :”Perancangan Atitude Monitoring and Surveilance Payload”.
1.2 Rumusan Masalah
Adapun permasalahan yang didapat dari penelitian ini adalah sebagai berikut.
1. Bagaimana mengukur percepatan payload pada koordinat ground station menggunakan accelerometer.
2. Bagaimana mendeteksi separasi.
3. Bagaimana agar citra B/W yang diambil Payload dari udara memiliki kualitas yang baik (tidak ada cacat dalam pengiriman).
4. Bagaimana agar Payload sekurang-kurangnya dapat mengirim sebuah citra ke ground station dalam waktu 60 detik.
5. Bagaimana merancang software ground station yang dapat menampilkan attitude monitoring, citra hasil RF dan pengontrolan Payload.
1.3 Tujuan
Tujuan tugas akhir ini adalah untuk merancang muatan roket (payload) yang dapat melakukan penginderaan dinamik roket, pengambilan dan pengiriman data
Adapun rincian dari tujuan tersebut adalah sebagai berikut.
1. Melalui percepatan dapat mengukur ketinggian pada koordinat ground station berdasarkan data accelerometer.
2. Melalui pengukuran percepatan, payload dapat mendeteksi separasi. 3. Citra yang dikirim oleh payload tidak cacat.
4. Citra dapat selesai dikirim dalam waktu kurang dari 60 detik.
5. Software Ground Station memiliki akusisi data yang cepat.
6. Membangun software ground station yang dapat menampilkan attitude monitoring, citra hasil RF & pengontrolan Payload.
1.4 Batasan Masalah
1. RF yang digunakan radio Hwa Wei YS-1020UA secara half duplex. 2. Ukuran dan berat payload yang dibuat, yaitu: diameter (100 ± 1) mm,
tinggi (200 ± 1) mm dan berat (1000 ± 10) g.
3. Mikrokontroler yang digunakan adalah Basic Stamp 2p40.
4. Software yang digunakan untuk membuat ground station berbasis LabView.
5. Sensor-sensor yang digunakan pada payload, yaitu:
1.5 Metode Penelitian
Metode penelitian yang akan dilaksanakan untuk mengerjakan tugas akhir ini
adalah sebagai berikut.
1.5.1 Studi Literatur
Studi pustaka yang berkaitan dengan Inertia Navigation System (INS), image enhacement, lembar data sensor-sensor serta manual mikrokontroller Basic Stamp dan perangkat lunak LabVIEW.
1.5.2 Pemilihan dan Pengadaan Komponen
Melakukan pengamatan dan memeriksa kesediaan dari
komponen-komponen dari segi biaya, dimensi, serta kinerja dari masing-masing
komponen yang digunakan dalam pembuatan payload di pasaran.
1.5.3 Desain Payload
Perancangan desain payload yang dapat memuat sistem catu daya, mikrokontroller, sensor-sensor dan kamera.
1.5.4 Perancangan Hardware
Pembuatan rangka dengan mempertimbangkan berat dari komponen
yang akan dipakai dan rangkaian elektronik payload.
1.5.5 Perancangan Software Mikrokontroller
1.5.6 Perancangan Software Ground Station
Pembuatan software ground station untuk memantau dan mengendalikan payload serta menampilkan data dalam bentuk grafik.
1.5.6 Pengujian Payload cara membawa payload dengan berlari.
4. Uji coba hasil image enhacement pada beberapa kondisi citra. 5. Uji coba pengiriman citra menggunakan modul RF.
6. Uji coba trajectory payload.
1.6 Sistematika penulisan
Sistematika pembahasan penyusunan laporan menggunakan bab-bab, dimana
pada setiap bab membahas suatu permasalahan. Guna memperoleh gambaran umum
mengenai permasalahan dan pembahasan dari program ini, maka disusun
BAB I PENDAHULUAN, membahas tentang latar belakang, tujuan dan kegiatan tugas akhir, perumusan masalah, metode pembahasan, lokasi dan waktu
tugas akhir dan sistematika penulisan.
BAB II DASAR TEORI, memaparkan tentang teori – teori dasar yang menjadi acuan untuk mengerjakan tugas akhir ini..
BAB III PERANCANGAN,membahas tentang konsep desain yang akan dibuat, pemilihan komponen, blok diagram serta system pendukung dalam perancangan
payload.
BAB IV PENGOLAHAN DAN ANALISA DATA mengupas dengan mengolah dan menganalisa data yang ada.
BAB II DASAR TEORI
2.1 Mikrokontroler (Basic Stamp 2p40)
BASIC Stamp merupakan mikrokontroler yang dikembangkan oleh Parallax Inc. Bahasa pemrograman yang dipakai pada basic stamp adalah bahasa pemrograman basic. Program dibuat pada software basic stamp editor 2,4. Program
yang telah dibuat selanjutnya bisa diunduh melalui port serial. Mikrokontroler BASIC Stamp membutuhkan power supply saat mengunduh program dan program yang sudah diunduh tidak akan hilang meskipun baterai atau power supply dilepas.
Mikrokontroler basic stamp memiliki versi yang berbeda-beda. Basic stamp memiliki versi, yaitu basic stamp 1, BASIC Stamp 2, BASIC Stamp 1e, BASIC Stamp 2P, BASIC Stamp 2Pe dan BASIC Stamp 2sx. Pada modul BASIC Stamp terdapat IC regulator LM7805 dengan output 5 volt yang mengubah input 6 hingga 15 volt (pada pin VIN) turun menjadi 5 volt yang dibutuhkan komponen.
BASIC Stamp 2p40 berfungsi sebagai otak dalam proyek elektronik dan
aplikasi yang membutuhkan mikrokontroler. BS2p40 dapat mengontrol dan
memonitor timer, keypad, motor, sensor, switch, relay, lampu, dan banyak lagi.
Semua komponen penting seperti prosesor, sumber clock, memori, dan power
Berikut ini adalah tampilan BASIC Stamp BS2P40:
Gambar 2.1 Modul basic stamp (BS2P40)
Gambar 2.2 Alokasi pin basic stamp
Fungsi dari masing-masing pin adalah sebagai berikut:
Table 2.1 Fungi konfigurasi pin
GND Ground
Basic stamp mempunyai spesifikasi hardware sebagai berikut:
2.2 BASIC Stamp Editor
BASIC Stamp editor adalah sebuah software buatan parallax inc yang
berfungsi sebagai mediator pada pemrograman BASIC Stamp dan untuk menulis,
mengcompile, dan mendownload program pada mikrokontroler BASIC Stamp. Bahasa yang digunakan dalam pemrograman ini menggunakan bahasa basic. Berikut
adalah langkah-langkah untuk memulai menggunakan BASIC Stamp editor.
a. Menjalankan,BASIC Stamp editor V 2.4
Gambar 2.3 Mejalankan BASIC Stamp Editor V 2.4
Setelah memulai untuk menjalankan BASIC Stamp editor tersebut,
maka selanjutnya BASIC Stamp editor siap digunakan. Berikut adalah tampilan
utama dari BASIC Stamp editor V 2.4.
b. Pemilihan tipe mikrokontroler
Gambar 2.5 Pemilihan Tipe Mikrokontroler Melalui Menu Utama
Dari gambar diatas terlihat bahwa beberapa tipe mikrokontroler
BASIC Stamp, pemilihan tipe digunakan sesuai dengan mikrokontroler yang
akan dipakai.
c. Menjalankan Program
Untuk menjalankan atau mendownload program pada BASIC Stamp sudah semestinya dilakukan penulisan program minimal satu intruksi.
Pemrograman BASIC Stamp bisa dikatakan mudah dibandingkan dengan
pemrograman mikrokontroller lainya. Pada menu help,lalu index telah terdapat
beberapa sintak yang disediakan untuk membuat program pada BASIC Stamp.
Beberapa sintak yang sering digunakan dalam pembuatan tugas akhir ini adalah
sebagai berikut.
a. DO, merupakan perintah untuk memulai suatu program yang diakhir program harus ditutup dengan perintah LOOP
c. DEBUG, merupakan perintah utuk menampilkan informasi pada layar PC atau laptop. Seluruh informasi dapat ditampilkan
termasuk iforasi dari sensor ataupun informasi yang diketik dengan diberi awalah dan akhiran tanda kutip dua (“ informasi”).
Informasi akan muncul apabila baudrate pada BASIC Stamp telah
disesuaikan. Berikut adalah tabel baudrate untuk DEBUG. Table 2.3 Tabel penyesuaian baudrate
d. PAUSE, merupakan perintah untuk memberikan delay pada program dalam satuan milidetik.
Gambar 2.6 Tampilan Debug terminal
e. SEROUT, merupakan perintah komunikasi untuk mengirimkan data secara serial.
f. SERIN, merupakan perintah komunikasi untuk menerima data secara serial.
g. FOR & NEXT, merupakan perintah pengulangan yang lebih spesifik. Pengulangan dapat dibatasi sesuai dengan kebutuhan
program. Contoh pengulangan program sebanyak tiga kali adalah
sebagai berikut.
Gambar 2.8 Tampilan debug pengulangan
h. GOTO, merupakan perintah untuk lompat menuju subroutine
Gambar 2.9 Contoh perintah “GOTO”
i. GOSUB, merupakan perintah untuk lompat menuju subroutine. Fungsi GOSUB hampir sama dengan GOTO. GOSUB merupakan kependekan dari GO to a SUBroutine. GOSUB biasaya diakhiri oelh fungsi RETURN.
j. RETURN, merupakan fungsi yang berdampingan dengan GOSUB dimana setelah eksekusi dari subroutine selesai maka program
Gambar 2.10 Contoh Program GOSUB
Gambar 2.11 Tampilan debug program GOSUB
Program yang telah di tulis melalui BASIC Stamp Editor selanjutnya
akan didownload, namun sebelum program didownload sebaikya diperiksa terlebih dahulu. Untuk memeriksa sintaknya maka tinggal menekan CTRL+T.
berikut adalah tampilan untuk memeriksa sintak yang sudah benar.
Untuk mengcompile dan mendownload program bisa dilakukan dengan menekan CTRL+R. Berikut adalah tampilan jika pendownloadan program sukses.
Gambar 2.13 Tampilan Pendownloadan Program
2.3 Komunikasi Basic Stamp
Komunikasi Basic Stamp ke Basic Stamp biasanya dilakukan apabila suatu
alat diharuskan mengguakan lebih dari satu buah mikrokontroler. Komunikasi ini
pada dasarya sama dengan komunikasi Basic Stamp ke mikrokontoler lain. Perlu
diperhatikan baudrate pada masing masing mokrokontroler. Pada umumya baudrate yang dipakai adalah 9600. Apabila terdapat perbedaan baudrate pada mikrokontroler
yang lain, maka dapat disesuaikan dengan baudrate antara mikrokontroler yang satu
dengan yang lainnya. berikut adalah gambar rangkaian komunikasi Basic Stamp ke
Gambar 2.14 Komunikasi Basic Stamp ke Basic Stamp
Adapun alternatif lain dari komunikasi Basic Stamp ke Basic Stamp
diperlihatkan pada gambar diawah ini.
Gambar 2.15 Komunikasi Basic Stamp ke Basic Stamp 2
Contoh program dalam komunikasi Basic Stamp adalah sebagai
berikut.
Gambar 2.17 Contoh program SERIN
Gambar 2.18 Tampilan debug program SERIN
Perintah serout merupakan perintah pengiriman data, dan dilanjutkan
dengan pin yang akan dipakai, kemudian dilanjutkan dengan baudrate, selajutnya data yang akan dikirim.
Perintah serin merupakan perintah menerima data,dan dilanjutkan dengan pin yang akan dipakai, kemudian dilanjutkan dengan baudrate, selanjutnya data yang akan diterima. Data yang akan diterima sebelumnya
dilakukan penginisialisasian. Inisialisasi biasanya menggunakan variable bit
Seperti yang telah dijelaskan sebeumnya, bahwa dalam komunikasi
antara mikrokontroler Basic Stam dengan Mikrokontroler Basic Stamp atau
dengan Mikrokontroler lainnya perlu diperhatikan baudrate yang akan dipakai. Berikut adalah baudrate yang bisa digunakan dalam komunikasi Basic Stamp.
Table 2.3 Baudrate Basic Stamp BS2P40
Tabel 2.4 Perhitungan Baudrate BS2
2.4 Port Serial/RS-232
Protokol standar yang mengatur komunikasi melalui serial port disebut
RS-232 yang dikembangkan oleh EIA (Elektronic industries Association). Enkoding yang digunakan dala komuikasi serial adalah NRZ (Non-Return-to-Zero),dimana bit 1 dikirim sebagai high value dan bit 0 dikirimkan sebagai low value. Dalam interfacing RS-232,tegangan negatif mempresentasikan bit 1 dan tegangan positif
komunikasi antara mikrokontroler ke PC atau sebaliknya. PC memiliki high logic 5V – 12V dan untuk low logic (-5V) – (-12V), sedangkan mikrokotroler mempunyai
level TTL low logic 0-1.8V dan high logic 2.2 – 5V, sehigga diperlukan converter.
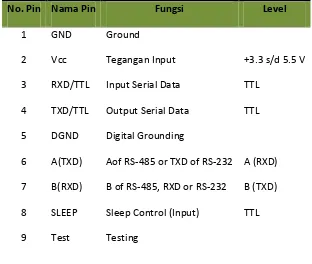
DB-9 adalah konektor yang digunakan untuk menghubungkan perangkat keras
luar komputer (eksternal) dengan komputer pada komunikasi serial. Pada komputer IBM PC kompatibel biasanya terdapat satu atau dua buah konektor DB-9 yang biasa
dinamai COM 1 dan COM 2.
Gambar 2.19Konektor DB-9 pada bagian belakang CPU
Tabel 2.5Konfigurasi pin dan nama sinyal konektor serial DB-9
Nomor Pin Nama Sinyal Fungsi Keterangan
1 DCD Input Data Carrier Detect/Received Line Signal Detect
Keterangan mengenai saluran RS232 pada konektor DB-9 sebagai berikut :
1. Received Line Signal Detect, dengan saluran ini DCE memberitahukan ke DTE bahwa pada terminal masukan ada data masuk.
2. Receive Data, digunakan DTE menerima data dari DCE. 3. Transmite Data, digunakan DTE mengirimkan data ke DCE.
4. Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan sinyalnya.
5. Signal Ground, saluran Ground.
6. Ring Indicator, pada saluran ini DCE memberitahukan ke DTE bahwa sebuah stasiun menghendaki hubungan dengannya.
7. Clear to Send, dengan saluran ini DCE memberitahukan bahwa DTE
2.4.1 Komunikasi RS232 Mengunakan HyperTerminal
Aplikasi RS232 dalam komunikasi data dapat dilakukan menggunakan
Gambar 2.20a Pengkabelan konektor DB9 female to female
Gambar 2.20b pengkabelan konektor DB9 female to male Pengkabelan diatas dilakukan untuk menjalankan komunikasi data
menggunakan dua buah komputer ke hyperteminal, namun untuk memastikan komputer tersebut dapat mengirimkan data sebaiknya dikakukan pengiriman
data secara loopback. Berikut adalah cara untuk melakukan loopback test. 1. Merubah pengkabelan pada konektor DB9
2. Mengaktifkan HyperTerminal
Gambar 2.22 Mengaktifkan HyperTerminal 3. Membuat nama project
4. Memilih saluran yang akan digunakan
Gambar 2.24 Memilih saluran pada komputer 5. Setting parameter port
6. Mengetik data yang akan dikirim
Gambar 2.26 Tampilan HyperTerminal
2.4.2 Komunikasi RS232 ke Basic Stamp
RS232 dapat berkomunikasi dengan berbagaimacam device, salah satunya adalah dengan menggunakan mikrokontroler Basic
Stamp. Komunikasi ini tidak memerlukan pengubah level tegangan, yang diperlukan hanya sebuah resisitor 22kΩ. Dalam beberapa
permasalahan pengubah level tegangan akan diperlukan. Berikut
adalah gambar komunikasi RS232 ke Basic Stamp.
2.5 Pengubah Level Digital ke RS232 (MAX232)
Komunikasi serial RS232 sering digunakan sebagai antar muka antara
computer dengan mikrokontroler. Agar level tegangan data serial dari mikrokontroler
setara dengan level tegangan komunikasi port serial PC, diperlukan MAX232 untuk mengubah ke tegangan TTL/CMOS logic level RS232.
Kegunaan IC MAX232 adalah sebagai driver, yang akan mengkonversi nilai tegangan atau kondisi logika TTL dari mikrokontroler agar sesuai dengan level tegangan pada modem komunikasi yang digunakan. IC yang dipakai pada sistem ini
memiliki 16 pin dengan tegangan sebesar 5 Volt. Pada dasarnya IC ini memerlukan
komponen tambahan berupa kapasitor ekternal yang dipasangkan pada pin-pin
tertentu. Kapasitor ini merupakan rangkaian baku yang berfungsi sebagai charge pump untuk menyuplai muatan ke bagian pengubah tegangan, dimana nilai setiap kapasitor yang dipakai bernilai 1uF.
Berikut ini adalah konfigurasi pin IC MAX232 pada gambar 2.5.
Gambar 2.29 Konfigurasi pin IC MAX232
Adapun alternatif lain untuk mengubah level tegangan dengan menggunakan
transistor adalah sebagai berikut.
2.6 Radio Frekuensi (Modul Radio YS-1020UB)
YS1020UB merupakan modem komunikasi yang dapat digunakan sebagai
modulator atau demodulator. Untuk menggunakan modul sebagai modulator maka
hanya digunakan satu pin saja, pin 7 (RXD) adalah pin masukan dengan level RS232.
Sebaliknya untuk menggunakan modul sebagai demodulator maka digunakan pin 6
(TXD) dengan level RS232.
Baudrate memiliki peranan penting agar proses komunikasi dapat berjalan dengan baik. Modul YS1020UB menyediakan berbagai pilihan baudrate yang dapat dengan mudah dipilih dengan menggunakan software Huawei Transceiver. Pada sistem komunikasi digunakan baudrate 9600 yang bertujuan untuk menyelaraskan kecepatan pengiriman data dari semua modul yang digunakan.
Modem radio ini mempunyai spesifikasi sebagai berikut :
Mempunyai 8 kananl untuk pengiriman/penerimaan data
Tipe modulasi yang dipakai adalah Gaussian Frequensy Shift Keying (GFSK) dengan menggunakan Gaussian filter untuk memperhalus penyimpangan frekuensi yang terjadi.
Dapat menggunakan level Transistor-Transistor Logic (TTL) dan RS232.
Integrasi antara receiver dan transmitter memerlukan waktu 10 ms antara pengiriman dan penerima.
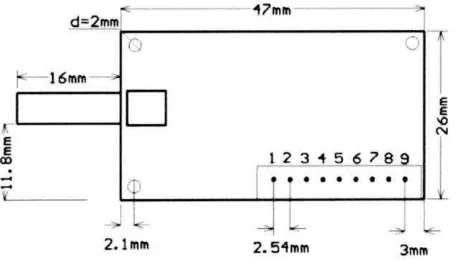
Berikut ini adalah gambar dimensi dan susunan pin, serta tabel yang
menjelaskan konfigurasi pin-pin pada radio YS-1020UB yang diperlihatkan
pada gambar 2.23 dan tabel 2.2.
Tabel 2.6 Pin-Pin Modul Radio YS-1020UB
5 DGND Digital Grounding
6 A(TXD) Aof RS-485 or TXD of RS-232 A (RXD)
7 B(RXD) B of RS-485, RXD or RS-232 B (TXD)
8 SLEEP Sleep Control (Input) TTL
9 Test Testing
2.7 Modul Kamera (CMUcam3)
Modul kamera CMUcam3 merupakan modul kamera yang dapat diprogram.
Pemrograman dilakukan dengan menggunakan bahasa C. Modul kamera CMUcam3
telah terintegrasi oleh beragai macam komponen penting, diantaraya adalah
mikrokotroler ARM7TDMI. Mikrokontroller ARM7TDMI tersebut memiliki
berbasiskan prosesor Philips LPC216. Didalam Mikrokontroller ARM7TDMI telah
terintegrasi IC MAX232 yang berfungsi sebagai converter. CMUcam3 dapat
Bentuk dari modul kamera CMUcam3 dapat dilihat pada gambar 2.33.
Gambar 2.33 Modul Kamera CMUcam3
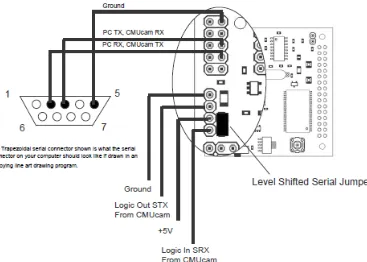
Berikut adalah kofigurasi pin dari modul CMUcam3.
Gambar 2.33b Konfigurasi Pin Modul Kamera CMUcam3
Gambar 2.33d Konfigurasi Pin Modul Kamera CMUcam3
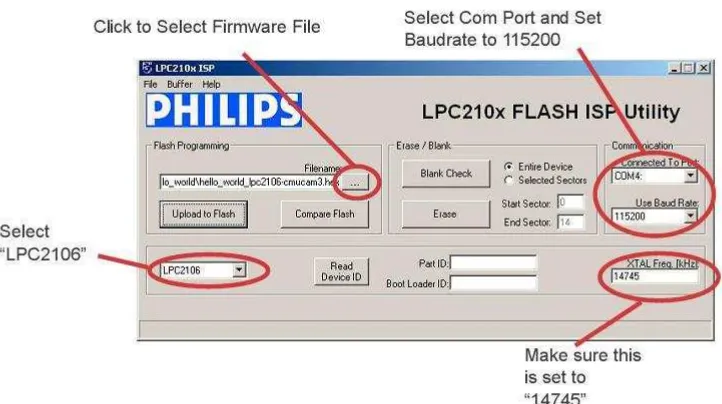
2.7.1 Pemrograman Modul Kamera (CMUcam3)
CMUcam3 merupaka modul kamera yang dapat diprogram. Langkah
utama dalam pemrogramannya adalah dengan cara menginstal software Philips
LPC210x FLASH utility. Berikut adalah langkah – langkah dalam mengistal
Philips LPC210x FLASH utility.
a. Mendownload software Philips LPC210x FLASH utility di http://www.semiconductors.philips.com/files/markets/microcontoll
ers/Philips_utility_Flash.zip.
b. Menginstall software Philips LPC210x FLASH
c. Menghubungkan serial port pada CMUcam ke komputer
Gambar 2.35 Pengkabelan Serial Port
d. Mengeksekusi LPC210x ISP. Berikut adalah gambar
mengeksekusi program pada LPC210x ISP.
Gambar 2.36 Setting parameter LPC210x ISP e. Memasukan parameter sesuai dengan datasheet
Gambar 2.37 Pesan Untuk Mereset CMUcam3
f. Menekan tombol reset kemudian nyalakan power suply dan melepaskan tombol reset satu detik setelah power suplai
dinyalakan.
Gambar 2.38 Power Switch dan ISP button
2.7.2 Compile Program
Berbeda dengan pemrograman BASIC Stamp, pemrograman pada
CMUcam bisa ditulis pada wordpad, tapi butuh software tambahan untuk
mengcompile program yang telah ditulis pada wordpad untuk dirubah dalam bentuk heksa. Software compiler tersebut adalah Cygwin bash shell. Software
Cigwin bash shell telah tersedia pada CD driver CMUcam. Berikut adalah
1. Menjalankan program cygwin bash shall yang sebelumnya telah di
install.
Gambar 2.39 Tampilan utama Cygwin Bash Shell 2. Memasukan alamat file yang akan dicompile
Gambar 3.40 Tampilan alamat file yang akan dicompile 3. Mengcompilefile telah dibuat dengan member perintah “make”
Gambar 2.41 Tampilan berhasil mengcompile
2.8 Sensor Accelerometer
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan
akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk
mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan
kecepatan dengan ataupun tanpa pengaruh gravitasi bumi.
Prinsip kerja dari tranduser ini berdasarkan hukum fisika bahwa apabila suatu
konduktor digerakkan melalui suatu medan magnet, atau jika suatu medan magnet
digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada
konduktor tersebut. Accelerometer yang diletakan di permukaan bumi dapat mendeteksi percepatan 1g (ukuran gravitasi bumi) pada titik vertikalnya, untuk
sesuai dengan tipe dan jenis sensor accelerometer yang digunakan karena setiap jenis sensor berbeda-beda sesuai dengan spesifikasi yang dikeluarkan oleh perusahaan
pembuatnya. Berikut adalah accelerometer yang digunakan.
Gambar 2.42 Accelerometer MMA7260Q
skema rangkaian dari modul MMA726Q akan diperlihatkan pada gambar 2.43.
Gambar 2.43 Skema Rangkaian Accelerometer MMA7260Q
diset sesuai dengan kebutuhan, mulai dari 1.5g, 2g, 4g, dan 6g dengan tigkat
sensitivitas yang berbeda-beda. Berikut adalah table 2.7 sebagai g-select.
Table 2.7 g-select dan sensitivisas sensor
2.9 Pengubah Sinyal Analog menjadi Digital
Analog to Digital Converter (ADC) adalah sebuah piranti yang dirancang untuk mengubah sinyal-sinyal analog menjadi sinyal-sinyal digital. ADC sendiri
memiliki berbagai macam tipe diantaraya ADC 0821, 0832, 0833 dan 0834. IC ini
bekerja dengan baik, namun perlu disesuaikan antara type dan kebutuhan. Hal-hal
yang perlu diperhatikan dalam penggunaan ADC adalah tegangan maksimum yang
dapat dikonversikan oleh ADC dari rangkaian pengkondisi sinyal, resolusi, pewaktu
eksternal ADC, tipe keluaran, ketepatan dan waktu konversinya.
Jenis ADC yang dipakai pada kesempatan kali ini adalah ADC 0833. .
Berikut ini bentuk fisik IC ADC0832 seperti yang terlihat pada gambar 2.44.
Gambar 2.44 ADC0833
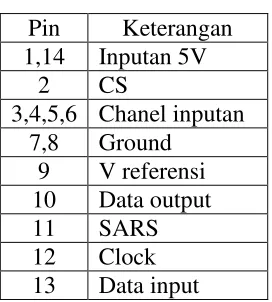
Berikut ini adalah konfigurasi pin IC ADC0833 seperti yang terlihat pada
gambar 2.45.
Gambar 2.45 Konfigurasi Pin ADC0833
Tabel 2.8 fungsi pin Pin Keterangan 1,14 Inputan 5V
2 CS
3,4,5,6 Chanel inputan 7,8 Ground
9 V referensi 10 Data output
11 SARS
Fitur yang dimiliki ADC0833, yaitu:
Mudah interface untuk semua mikroprosesor.
TTL/MOS input/output compatible TTL/MOS input/output yang kompatibel.
Beroperasi dengan link data serial.
Mudah untuk digunakan bersama rangkaian mikroprosessor.
Tidak diperlukan penyesuaian yang rumit.
mempunyai 4 channelmultiplexer dengan 2 buah alamat logika. Jangkauan input berkisar 0-5 volt dengan satu buah catu daya 5 volt. Berikut adalah contoh program pada Basic Stamp untuk program
ADC.
2.10 Perangkat Lunak LabView
LabVIEW adalah bahasa pemrograman berbasis grafis atau blok diagram
sementara bahasa pemrograman lainnya seperti C++, Matlab atau Visual Basic
menggunakan basis text.
Program LabVIEW terdiri dari tiga komponen utama yaitu front panel, block diagram dan icon. Front panel adalah user interface antara pengguna dengan program. Gambar 2.47 menunjukkan contoh dari sebuah front panel. Front panel dibuat dengan menggunakan controls dan indicators. Controls adalah simulasi dari instrument masukan seperti knobs, push buttons, dials dan peralatan input lainnya. Sedangkan indicators adalah adalah simulasi dari instrument keluaran seperti graphs, LEDs dan peralatan displays lainnya.
Gambar 2.48 Contoh dari sebuah block diagram yang mengatur program LabVIEW pada Gambar 2.47.
Salah satu keunggulan dari LabVIEW adalah setelah suatu program VI
dibuat, maka user dapat menggunakan program VI tersebut sebagai subVI pada block diagram dari VI lainnya. Suatu program VI yang mengandung subVI dapat digunakan lagi sebagai subVI pada program VI lainnya sehingga dapat membentuk suatu lapisan-lapisan hirarki. Tidak ada batasan jumlah lapisan hirarki pada LabVIEW.
2.11 Catu Daya
Catu daya memegang peranan yang sangat penting dalam hal perancangan
Penentuan sistem catu daya yang akan digunakan ditentukan oleh banyak
faktor, diantaranya:
1. Tegangan
Payload memiliki rangkaian elektronika dengan berbagai macam karakteristik
yang membutuhkan power suplai yang berbeda. Payload yang akan dirancang
membutuhkan 9V power suplai untuk memberikan daya pada mikrokontroler
dan modul kamera
2. Arus
Arus memiliki satuan Ah (Ampere-hour). Semakin besar Ah, semakin lama daya tahan baterai bila digunakan pada beban yang sama.
3. Teknologi Baterai
Baterai isi ulang ada yang dapat diisi hanya apabila benar-benar kosong, dan
ada pula yang dapat diisi ulang kapan saja tanpa harus menunggu baterai
tersebut benar-benar kosong.
Baterai yang digunakan pada perancangan payload ini berjenis lithium polymer (LiPo). Baterai ini dapat diisi ulang (rechargeable). Baterai yang digunakan memiliki tegangan 11,1 Volt dan arus sebesar 2200 mAh dengan 3 cell di dalamnya. Cell merupakan teknologi konversi energi elektrokimia yang mampu mengubah senyawa hidrogen dan oksigen menjadi air, dan dalam prosesnya menghasilkan
turun mendekati batas tegangan 11,1 Volt, sehingga harus diisi ulang agar melebihi
tegangan 11,1 Volt. Berikut ini adalah contoh sebuah baterai lithium polymer.
Gambar 2.49 Baterai lithium polymer
Selain jenis baterai lithium polymer (LiPo), masih banyak lagi jenis baterai yang tersedia di pasaran dengan spesifikasi yang beragam dan dapat digunakan untuk
catu daya. Diantaranya baterai Ni-Cd, Alkaline, Lead Acid dan sebagainya.
2.12 Multiplexer
Multiplexing adalah Teknik menggabungkan beberapa sinyal untuk dikirimkan secara bersamaan pada suatu kanal transmisi. Dimana perangkat yang
melakukan Multiplexing disebut Multiplexer atau disebut juga dengan istilah Transceiver / Mux. Dan untuk di sisi penerima, gabungan sinyal - sinyal itu akan kembali di pisahkan sesuai dengan tujuan masing – masing. Proses ini disebut dengan
Gambar 2.50 IC multiplexer 4051
Konfigurasi pin IC multiplexer 4051 dapat dilihat pada gambar 2.49.
Gambar 2.51 konfigurasai pin IC multiplexer 4051
Tabel 2.9 Fungsi pin multiplexer 4051
11,10,9 S1,S2,S3 Input control biner 12,13,14,15,1,2,4,5 Y0~Y7 Input / output data
16 VDD Suplai 5V
Tabel 2.10 tabel kebenaran IC 4051
BAB III
PERANCANGAN SISTEM
Pada bab ini akan membahas tentang perancangan sistem pengiriman data
accelerometer sebagai attitude monitoring serta pengambilan citra sebagai surveilance. Pada perancangan sistem ini dibagi menjadi tiga bagian penting, yaitu:
a. Perancangan mekanik.
b. Perancangan perangkat keras.
c. Perancangan perangkat lunak.
3.1 Perancangan Mekanik
Perancangan mekanik payload, dirancang berdasarkan ketentuan KOMURINDO 2011. Berat harus sesuai karena beban yang terlalu berat atau
ringan,dapat menyeabkan pergerakan roket yang tidak stabil. Ukuran payload harus sesuai juga dikarenakan kompartemen roket yang tersedia memiliki diameter 110 mm
dan memiliki tinggi 210mm. Ukuran dan berat payload yang dirancang adalah sebagai berikut:
Gambar 3.1 Dimensi dan Susunan Komponen Payload Gambar diatas merupakan gambar sketsa 3D payload dan penempatan komponen yang akan diintegrasikan pada payload. Berikut adalah rician penempatan komponen pada payload.
a. Pada kompartemen bagain atas terdapat komponen sensor dan
mikrokontroler. Komponen mikrokontroler dan sensor accelerometer dibuat dalam satu rangkaian terintegrasi agar tidak terlalu banyak
c. Pada kompartemen bagain bawah terdapat modul CMUcam3 dan
terdapat modul radio yang berfungsi sebagai transceiver.
d. Pada bagian belakang terdapat baterai yang berfungsi sebagai catu daya
dari seluruh rangkain elektronika.
3.1.1 Pemilihan Komponen
Bahan dan komponen dipilih berdasarkan kebutuhan, perancangan,
kualitas, dan harga. Bahan dan komponen utama dalam penyusunan payload ditampilkan pada Tabel 1 berikut.
Tabel 3.1. Daftar material dan komponen payload
Bagian payload Material/Komponen Keterangan Kerangka utama Akrilik, spacer,
Alumunium
Kuat, cukup ringan dan mudah dibentuk
Sistem
pengiriman data Radio modem Huawei
Disesuaikan dengan aturan Komurindo
Sensor wajib AccelerometerMMA7260Q
Kinerja kerja sangat
Processor Basic Stamp BS2p40 Bahasa pemrogramannya mudah dan sederhana
3.2 Perancangan Perangkat Keras
Perancangan perangkat keras dapat digambarkan dalam diagram blok diawah ini.
Gambar 3.2 Diagram blok sistem Payload
Berikut adalah penjelasan dari diagram blok sistem payload. a. Mikrokontroler Basic Stamp
Bagian blok ini memuat Mikrokontroler Basic Stamp 2p40. Bagian blok ini berfungsi sebagai pengolah data yang diterima dari sensor
accelerometer, Blok ini juga berfungsi sebagai pengatur komunikasi data antara mikrokontroler dan modul CMUcam3 serta untuk
b. Modul CMUcam3
berfungsi sebagai pengukur percepatan geravitasi yang dialami
payload yang kemudian datanya akan dikonvert pada blok ADC diolah pada mikrokontroler Basic Stamp.
d. Modem
Blok ini memuat modul radio YS-1020UB yang berfungsi mengubah
mengirimkan data mikrokontroller dan dari modul kamera.
e. Power
Bagian blok ini berfungsi sebagai pencatu daya dati semua komponen
elektronika.
3.2.1 Mikrokontroler (Basic Stamp 2p40)
Mikrokontroler yang digunakan pada perancangan payload ini adalah mikrokontroler jenis basic stamp2P40 dengan 32 port yang dapat digunakan sebagi input atau output. Pemilihan mikrokontroler jenis ini didasari kemampuannya yang cukup handal dan pemrograman yang tidak terlalu sulit.
Perancangan software pada mikrokontroler mengguaka bahasa basic
dengan menggunakan mikrokontroler BASIC Stamp editor V 2.4 dimana hasilnya akan disimpan dalam bentuk file yang erekstensikan bsp (*bsp). File
inilah yang nantinya akan dimasukan kedalam mikrokontroler.
Berikut ini merupakan konfigurasi port yang digunakan mikrokontroler , seperti yang terlihat pada tabel 3.1.
Tabel 3.2 Konfigurasi port yang digunakan pada mikrokontroler BS2p40. Nama Pin No. Pin Fungsi Keterangan
Mikrokontroler BS2p40 berfungsi sebagai pengolah data sensor
percepatan yang akan dikirim ke ground station yang disebut sistem telemetri. Mikrokontroler ini pun berfungsi sebagai penerima data dari ground station atau disebut sistem telecommand. Mikrokontroler BS2p40 ini berperan sebagai jantung dari payload yang dibuat dikarenakan mikrokontroler ini sekaligus menjadi komando atas mikrokontroler ARM yang terdapat pada
3.2.2 Pendeteksi Separasi (Rangkaian Mikro Switch)
Mikrokontroler melakukan pengecekan kondisi pada sesor separasi
dengan membaca nilai output dari rangkaian yang dibuat untuk mengetahui kondisi separasi. Pada saat posisi sensor separasi dalam keadaan low, maka mikrokontroler akan mengerjakan proses pembacaan accelerometer. Ketika sensor separasi dalam keadaan high maka tugas mikrokontroler dalam membaca sensor accelerometer selesan dan kemudian dilajutkan dengan memberi perintah pada CMUcam3 untuk mengirimkan data citra ke ground station. Rangkaian Pendeteksi separasi akan diperlihatkan pada gambar berikut.
Gambar 3.3 Rangkaian Pendeteksi Separasi
3.2.3 Pengubah Sinyal Analog ke Digital (ADC0833)
ADC yang digunakan pada perancangan payload ini, yaitu menggunakan ADC0833. Pemilihan ADC jenis ini disesuaikan dengan
ADC0833 memiliki tegangan referensi (VREF) sebesar 2.5V, maka diperlukan system pembagi tegangan dengan menggunakan dua buah resistor
yang memiliki nilai yang sama,kemudian kedua resistor terseut dihubungkan
secara parallel sehingga mendapatkan tengangan keuluaran sebesar 2.5V.
Channel 0 digunakan sebagai sinyal input untuk membaca data keluaran dari sensor accelerometer x axis dan channel 1 sebagai sinyal input untuk membaca data keluaran dari sensor accelerometer y axis serta channel 2 sebagai sinyal input untuk membaca data keluaran dari sensor accelerometer z axis. Pada dasarnya Analog To Digital Converter (ADC) memiliki 2 bagian, yaitu bagian multiplexer dan bagian converter. Bagian multiplexer ini mempunyai 4 buah masukan, setiap masukan memilki alamat sendiri sehingga
dapat dipilih secara terpisah melalui address A0 dan A3.
3.2.4 Sensor Percepatan (MMA7260Q)
Pada perancangan payload ini menggunakan sensor MMA7260Q yang digunakan sebagai sensor accelerometer, yaitu pengukur data percepatan gravitasi yang terjadi pada payload. Sensor tersebut ekerja pada tegangan 2,2V – 3,6V DC,dan menggunakan arus yang sangat kecil yaitu 500uA.
Akselerasi pada masing-masing sumbu menghasilkan tegangan dari 0 sampai
3,3V. Saat tidak bekerja, tegangan yang keluar dari masing – masing
sumbunya yaitu sekitar 1,65V. Jika diberikan akselerasi pada sumbu positif
Sebaliknya jika diberi akselerasi pada sumbu negative, maka tegangan
keluaran dari sumbu tersebut akan turun. Artinya:
a. Pada saat berheti, tegangan keluarannya ditengah
b. Pada saat akselerasi ke atas, tegagannya akan naik
c. Pada saat akselerasi ke bawah, tegangan akan turun.
3.2.5 Modul CMUcam3
Modul CMUcam3 digunakan pada payload sebagai alat untuk pengambilan citra yang nantinya akan dikirim melalui RF. Pemilihan modul
CMUcam3 ini dikarenakan modul kamera ini dapat diprogram sesuai dengan
keinginan. Dalam hal ini CMUcam3 diprogram agar dapat mengirimkan data
citra digital 200x200 pixel B/W.
Mikrokontroler yang terintegrasi dalam modul tersebut
memungkinkan untuk bisa berkomunikasi dengan mikrokontroler BS2p40
dengan komunikasi serial pada baudrate 9600. Baudrate modul CMUcam3
maksimal mencapai 15200bps, namun dapat disetting menjadi 9600bps sesuai
dengan peraturan KOMURINDO 2011. Berikut adalah Gambar komunikasi
mikrokontroler BS2p40 dengan modul CMUcam3.
Berikut adalah gambar skema rangkaian keseluruhan dari payload.
Gambar 3.6 Skema rangkaian seluruh sistim payload 3.2.5 Sistem Transmisi
Media komunikasi yang digunakan pada perancangan alat yang dibuat,
yaitu melalui frekuensi radio (RF) dengan menggunakan modul radio
YS-1020UB. YS-1020UB merupakan modul komunikasi yang sangat aman. Modul
radio YS-1020UB mempunyai 8 kanal dengan frekuensi yang berbeda.
Jarak jangkauan komunikasi maksimal sekitar 800 meter pada baudrate 9600bps.
Dari konfigurasi pin-pin radio YS-1020UB, pin yang digunakan pada
perancangan payload hanya terdiri dari GND, Vcc, RXD/TTL dan TXD/TTL yang dihubungkan langsung pada pin di mikrokontroler.
Gambar 3.7 Rangkaian RF YS-1020UB
Gambar diatas merupakan gambar rangkaian ground station penerima yang telah terintegrasi RF YS-1020UB serta rangkaian MAX232 sebagai
converter dari level TTL ke UART. Data yang diterima melalui RF tersebut
akan disalurkan PC atau laptop dan akan di oleh menggunakan software ground station.
3.2.5.1 Pengubah level TTL ke UART (MAX232)
Rangkaian RS232 berfungsi untuk komunikasi antara modem
dengan komputer. Dikarenakan berbeda level antara PC dan
mikrokontroler,maka dibutuhka suatu converter. Komponen utamanya adalah menggunakan IC MAX232, yaitu sebuah IC yang dapat
sampai +25 V. Diantara -3 dan +3 merupakan tegangan invalid. Rangkaian RS232 ditunjukkan pada gambar 3.7.
Gambar 3.8 Rangkaian RS232
3.2.5.2 Format Pengiriman Data
Tabel 3.3 Format pengiriman data 12 detik pertama
3.3 Perancangan Perangkat Lunak
Perancangan software ground station dibangun dengan menggunakan LabVIEW. Software ground station dirancang sesuai dengan format data yang dikirim oleh Basic Stamp. Berikut adalah gambar software ground station yang dibuatbeserta keterangan dari masing – masing fungsi-fitur yang ada.
Keterangan:
1. Panel dimana gambar yang dikirim akan ditampilkan secara realtime
2. Panel utuk mengontrol kamera dimana terdapat tombol utuk mengambil
gambar dan tombol untuk menggerakan kamera sampai 180 derajat.
3. Indikator yang akan menghitung jumah baris gambar.
4. Indikator data mentah yang masuk ke ground station. 5. Header kode.
6. Delay telekontrol.
7. Format data yang akan dikirim.
8. Tombol ON / OFF telemetri dan telecomand.
9. Tombol mengurangi setpoint.
10.Tombol untuk menaikan kecepatan motor.
11.Tombol untuk menambah setpoint.
12.Tombol untuk menaikan kecepatan motor dengan tiga kecepatan yang
berbeda.
13.Indikator kompas
14.Indikator antara grafik kompas dan setpoint.
15.Grafik dari data accelerometer. 16.Panel untuk video sender.
Berikut adalah format data telecommand yang dikirim oleg ground station ke payload.
Tabel 3.5 format data telecommad
Byte-1 Byte-2 Byte-3,4,5 Byte- 6 Byte-7
Header (R) Flag Command Posisi servo kamera
Berikut adalah cara menggunakan software ground station berbasis LabView.
1. Dengan menekan tombol run pada pojok kiri atas maka program akan jalan.
Gambar 3.11 Menjalankan program ground station 2. Merubah port I/O yang terletak diatas tombol start telemetri.
3. Merubah system yang akan digunakan (Homing atau nonhoming)
Gambar 3.12 Menentukan system payload
4. mengaktifkan telemetri dengan menekan tombol start telemeti.
Gambar 3.13 Start telemetri
5. Data akan muncul setelah tombol telemetri on dan akan tampil pada panel string yang disediakan dan akan dibuat grafik pada panel grafik.
Gambar 3.14b Tampilan data telemetri berupa grafik
6. Dengan menekan tombol grab picture maka sistem telemetri akan menerima data gambar dan mengehentikan telemetri data accelerometer (grab picture bisa dilakukan apabila payload berhasil separasi).
Gambar 3.15a Tombol grab picture
7. Tombol “control on” berfungsi sebagai telecommand separasi apabila sensor separasi pada payload mengalami kerusakan.
Gambar 3.16 tombol telecommad separasi
8. Telemetri accelerometer kembali dikirim apabila proses pengiriman data gambar telah selesai.
9. Dengan menekan tombol “start telemetri” maka semua telemetri dihentikan
dan file bisa disave.
3.4 Perancangan Program Mikrocontroller
Perancangan program mikrocontroller dibuat pada software Basic Stamp editor 2.4. perancangan yang akan dibuat merupakan algoritma pemrograman yang
Cek separasi
Gambar 3.17a Flow Chart diagram payload
Gambar 3.17b Flow chart diagram payload (sambungan)
C
Tunggu command dari ground station
Kamera = 0
B
end Kirim data gambar
T
BAB IV
PENGUJIAN DAN ANALISIS
4.1 Pengujian Radio Frekuensi (Modul Radio YS-1020UB)
Modul radio YS-1020UB merupakan modul radio yang berfungsi sebagai
modem yang diproduksi oleh HwaWei. Modul ini pada dasarnya memiliki jarak
pancar sampai 800 meter line of sight. Jarak pancar radio terseut akan mengalami fluktuasi apabila terdapat suatu halangan yang terdapat diantara radio pengirim dan
radio penerima. Pengujian yang dilakukan pada radio tersebut adalah menguji daya
pancar yang dilakukan di lapang terbuka.
Tabel 4.1 Hasil pengujian komunikasi modul radio YS-1020UB Jarak
(meter) Data yang dikirim
Data yang
diterima Kondisi
Keterang an
10 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
20 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
30 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
40 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
50 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
60 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
70 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
80 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
90 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
100 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
110 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
120 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
130 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
140 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
150 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
160 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
170 Counter 1~10 Counter 1~10 Baik (data continue) Berhasil
180 Counter 1~10 Counter 1~10 Kurang Baik (data tidak continue) Berhasil
Pengujian komunikasi modul radio YS-1020UB dilakukan dengan
mengirimkan data counter pada penerima. Dengan mengirimkan data counter maka akan terlihat data yang terlewat sebagai data error atau pengirim terhambat. Dilihat
dari tabel 4.1, pengujian jarak telemetri hanya dapat mencapai jarak kurang dari
200m. Jarak yang ditempuh oleh payload harus lebih dari 500 meter, maka diperlukan antena penerima dengan gain yang lebih besar.
4.2 Pengujian Sensor Accelerometer
Sensor accelerometer merupakan sensor wajib yang berfungsi sebagai attitude monitoring pada payload roket. Sebelum payload diluncurkan maka perlu dilakukan pengujian yang melibatkan sensor accelerometer. Pengujian akan dilakukan dengan empat tahap penggujian. Pengujian tersebut adalah sebagai berikut.
a. Uji g-force
Uji g-force merupakan pengujian dengan memberi putaran pada payload maksimal sebesar 6g.
b. Uji g-shock
Uji g-shock merupakan pengujian dengan memberi hentakan pada payload maksimal sebesar 6g.
c. Uji vibrasi
Uji vibrasi merupakan pengujian dengan memberi goncangan pada
d. Uji trajectory
Uji trajectory dilakukan dengan cara payload digerakan menuju daerah tertentu dan dilakukan perhitungan data accelerometer sehingga didapatkan jarak yang ditempuh oleh payload.
4.2.1 Uji g-force
Sensor MMA7201Q digunakan untuk mengukur percepatan yang
dialami payload. Pengujian g-force menggunakan sensor MMA7201Q dilakukan menggunakan sebuah pemutar dengan cara menempatkan payload pada alat pemutar yang telah dibuat diukur percepatannya. Sensor
MMA7260Q yang terdapat pada payload akan mengukur percepatan pada pemutar tersebut. Hasil pengukuran percepatan akan dikirim ke ground station melalui radio frekuensi.
Pengujian g-force dilakukan pada alat pemutar yang telah dibuat
sebelumnya dengan percepatan maksimal 4g. Berikut adalah tabel pengujian
g-force.
Tabel 4.1 Data pengukuran g-force selama 12 detik
Tabel 4.1 merupakan tabel hasil pengukuran uji g-force dalam skala
lab menggunakan alat pemutar. Data pada tabel 4.1 merupakan data 12 detik
pada saat pengujian yaitu pada detik ke 70 sampai 82.
4.2.2 Uji g-shock
Pengujian g-shock menggunakan sensor MMA7201Q dilakukan menggunakan palu dengan cara menempatkan payload dibawah palu yang kemudian palu tersebut akan menghentak payload. Sensor MMA7260Q yang terdapat pada payload akan mengukur percepatan yang menghentak payload. Hasil pengukuran uji g-shock akan dikirim ke ground station melalui radio frekuensi.
4.2.3 Uji Vibrasi
Pengujian vibrasi dilakukan dengan memberikan goncangan pada
payload. Goncangan tersebut bisa dilakukan dengan menggunakan alat Vibrator atau diberikan goncangan manual yaitu digoncangakan oleh tangan dengan kuat. Alternatif lain dalam pengujian vibrasi ini adalah dengan
membawa payload yang dipegang oleh seseorang yang sedang berlari. Sensor accelerometer akan mendeteksi goncangan tersebut dan data yang diterima oleh sensor accelerometer dikirimkan ke ground station menggunakan radio frekuensi.
Tabel 4.3 Data pengujian vibrasi
Uji trajectory dilakuakan agar payload sebelum dimasukan ke dalam roket sudah mampu melakukan penginderaan didarat yaitu denga pengujian
trajectory darat. Pengujan ini dilakukan dengan cara payload dipegang oleh seseorang lalu dibawa menggunakan sepeda motor. Paylaod akan mendetekesi
percepatan pada sepeda motor dan data percepatan dari MMA7260Q akan
4.3 Pengujian Kamera
Modul kamera CMUcam3 yang terpasang pada payload merupakan suatu system payload yang berfungsi sebagai surveillance. Modul kamera CUMcam3 dipakai dikarenakan modul ini dapat diprogram sesuai dengan ketentuan
KOMURINDO 2011 yaitu 200x200 pixel. Adapun pengujian yang akan dilakukan
adalah sebagai berikut.
1. Pengujian pengambilan citra di lab (static dan diamik).
2. Pengujian pengambilan citra di ruang terbuka (static dan dinamik).
4.3.1 Pengujian Lab
Pada pengujian ini payload mengambil citra di ruangan lab. Pengujian lab akan diperlihatkan pada ganbar 4.4a dan gambar 4.4b.
Gambar 4.4b Pengujian pegambilan citra di lab (dinamik)
Pengujian di lab dilakukan sebanyak dua kali yaitu pengujian pada
saat static dimana payload dalam kodisi diam saat pengamilan citra dan dinamik dimana payload dalam kondisi bergerak pada saat pengambilan citra.
4.2.1 Pengujian di Ruang Terbuka
Pada pengujian kali ini payload melakukan pengamilan citra di ruang terbuka. Pengujian payload di ruang terbuka akan diperlihatkan pada gambar 4.5a dan gambar 4.5b serta 4.5c.
Gambar 4.5b pengambilan citra di luar ruangan menggunakan filter (statik)
Gambar 4.5c pengambilan citra di luar ruangan menggunakan filter (dinamik)
Pengujian di luar ruangan dilakukan sebanyak tiga kali yaitu pengujian
pada saat tanpa eggunakan filter ,pada saat mengguakan filter static dimana
4.4 Analisa Pengujian
4.4.1 Analisa Radio Frekuensi (Modul Radio YS-1020UB)
Berdasarkan hasil data-data yang didapat dari pengujian modul radio
YS-1020UB seperti yang terlihat pada tabel 4.1 pada jarak 10m sampai
dengan 170m komunikasi dapat berlangsung dengan baik, data yang
diterima sesuai dengan data yang dikirim dan tidak ada data yang
terlewatkan. Pada jarak diatas 170m sampai dengan 180m data dapat
diterima tetapi komunikasi dianggap gagal dikarenakan adanya data yang
terlewatkan, hal ini dipengaruhi karena adanya gangguan (penghalang)
seperti adanya beberapa kendaraan roda empat (mobil) melintas pada saat
pengujian sedang berlangsung. Pada jarak diatas 180m data tidak dapat
diterima, hal ini dipengaruhi karena diluar jangkauan jarak kerja dari modul
radio YS-1020UB.
Pada dasarya modul radio YS-1020UB dapat mengirimkan data
dengan maksimal jarak 800m. pada pengujian diatas terlihat bahwa jarak
yang bisa diterima maksimal sekitar 180m. Jarak YS-1020UB dapat
4.4.2 Analisa g-force
Pengujian g-force dilakukan dengan cara meletakan payload pada sebuat pemutar dan diberi putaran maksimal 6g. Sensor percepatan
MMA7260Q yang terdapat pada payload akan dikirimkan secara realtime. Grafik pengujian g-force akan ditampilkan pada gambar 4.6.
Gambar 4.6 Grafik uji g-force
Grafik diatas diambil dari data hasil pegujian g-force. Data tersebut merupakan data hasil kalibrasi. Data hasil kalibrasi harus dirubah menjadi
data dalam betuk satuan gravitasi dengan menggunkanan persamaan 4.1.
a= ...(persamaan 4.1)
Data maksimal dari grafik diatas adalah 125. Untuk mendapatkan hasil
pengukuran dalam satuan grafitasi maka data grafik diatas dimasukan dalam
a=
a= 2.5g ………....(persamaan 4.2) hasil dari uji g-force yang dilakukan menunjukan maksimal adalah
sebesar 2.5g.
4.4.3 Analisa g-shock
Pengujian g-shock dilakukan dengan cara meletakan payload diawah palu yang berfungsi sebagai penghentak payload. Sensor percepatan MMA7260Q yang terdapat pada payload mendeteksi percepatan dari hentakan payload. Data tersebut akan dikirimkan secara realtime. Grafik pengujian g-shock akan ditampilkan pada gambar 4.7.
Data maksimal dari grafik diatas adalah 113. Untuk mendapatkan hasil
pengukuran dalam satuan gravitasi maka data grafik diatas dimasukan dalam
persamaan 4.1.
a=
a= 1.3g ………....(persamaan 4.3) hasil dari uji g-shock yang dilakukan menunjukan maksimal shock pada payload adalah sebesar 1.3g.
4.4.4 Analisa Vibrasi
Pengujian vibrasi dilakukan dengan cara menggoncangkan payload dengan kedua tangan sehingga dihasilkan getaran pada payload. Payload akan mengirimkan data getaran yang dihasilkan oleh tangan lalu dikirimkan ke
ground station secara realtime.
Data maksimal dari grafik uji vibrasi adalah 150. Untuk mendapatkan
hasil pengukuran dalam satuan grafitasi maka data grafik diatas dimasukan
dalam persamaan 4.1.
a=
a= 5g ………....(persamaan 4.4) hasil dari uji vibrasi yang dilakukan secara manual menunjukan
maksimal vibrasi yang diterima oleh payload adalah sebesar 5g.
Dari ketiga hasil pengujian yang telah dilakukan yaitu,shock, g-force, dan vibrasi, data yang dikirimkan secara realtime tidak mengalami error atau cacat. Dengan demikian ketiga pengujian telemetri diatas berhasil
mengirimkan data 100% tanpa cacat.
4.4.4 Analisa Trajectory
Uji trajectory yang dikakukann adalah dengan membawa payload yang dipegang oleh seseorang lalu dibawa menggunakan sepeda motor
dengan membentuk bujur sangkar. Trajectory yang dilakukan berupa 2
dimensi, yaitu menghitung percepatan hanya pada sumbu x dan sumbu y. data
Gambar 4.9 Trajectory payload
pada grafik trajectory diatas terlihat bahwa trajectory berhasil ditampilkan. Trajectory yang dilakukan dalam pengujian menggunakan sepda
otor berupa bujur sangkar. Dilihat dari grafik diatas hampir menyerupai bujur
sangkar, simpangan yang terjadi dikarenakan saat megendarai sepeda motor,
sepeda motor pun tidak tetap berjalan membentuk bujur sangkar.
4.4.4 Analisa Pengambilan Citra
Pengambilan citra dilakukan pada beberapa kondisi. 1. Di dalam lab (statik)
2. Di dalam lab (dinamik)
3. Di ruang terbuka (statik)
4. Diruang terbuka (dinamik)
Pada gambar 4.4a terdapat gambar pengujian citra di lab (statik). Pada
kondisi statik payload dapat mengirimkan data citra sebanyak 200x200pixel tanpa ada cacat. Waktu pengiriman citra sekitar 43 detik. Kualitas citra bisa
dibilang baik tanpa ada pergeseran data.
Pada gambar 4.4b terdapat pengujian citra di lab(dinamik). Pada
kondisi dinamik payload dapat mengirimkan data citra sebanyak 200x200pixel tanpa ada cacat. Waktu pengiriman citra sekitar 43 detik.
Kualitas gambar yang dihasilkan kurang baik karena mengalami blur.
Pada gambar 4.5 terdapat pengujian citra di luar ruangan. Hasil yang
diterima baik yaitu 200x200pixel berhasil diterima pada ground station, namun kualitas gambar yang dihasilkan buruk. Semua gambar terlihat putih.
Pada gambar 4.6 terdapat pengujian citra di luar ruangan. Hasil yang
diterima baik yaitu 200x200pixel berhasil diterima ground station. Kualitas gambar yang dihasilkan lebih baik dari gambar 4.5 dikarenakan pada lensa
kamera dipasang sebuah filter.
Pada gambar 4.7 terdapat pengujian citra di luar ruangan. Hasil yang
diterima baik yaitu 200x200pixel berhasil diterima ground station. Kualitas gambar yang dihasilkan lebih baik dari gambar 4.5 dikarenakan pada lensa
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari pembahasan pada bab-bab sebelumnya, maka akhirnya penelitian pada tugas
akhir ini dapat diambil beberapa simpulan antara lain:
1. Berdasarkan tabel 4.1 modul radio YS-1020UB yang digunakan pada sistem
ini dapat berkomunikasi dengan jarak 170m, hal itu terjadi karena sinyal radio
mengalami pelemahan sinyal.
2. Berdasarkan tabel 4.2 pengujian g-force berhasil dilakukan karena pada saat pengirim data, data yang diterima di ground station tidak mengalami putus transmisi. Gravitasi yang dihasilkan oleh g-force tersebut adalah sebesar 2.5g 3. Berdasarkan tabel 4.3 pengujian g-shock berhasil dilakukan karena pada saat
pengirim data, data yang diterima di ground station tidak mengalami putus transmisi. Gravitasi yang dihasilkan oleh g-shock tersebut adalah sebesar 1.3g 4. Berdasarkan tabel 4.4 pengujian vibrasi berhasil dilakukan karena pada saat
pengirim data, data yang diterima di ground station tidak mengalami putus transmisi. Gravitasi yang dihasilkan oleh vibrasi tersebut adalah sebesar 5g