DATA PRIBADI
Nama : SUGENG
Jenis Kelamin : Laki - laki
Tempat / Tgl Lahir : Boyolali / 27 Juni 1988 Kewarganegaraan : Indonesia
Status Perkawinan : Belum Menikah Tinggi / Berat Badan : 170 / 58
Kesehatan : Sangat Baik
Agama : Islam
Alamat : Jl. Raya Cigadung Timur, Sekemirung No. 49, Cigadung, Cibeunyingkaler – Bandung 40393
Telepon : 085222273079
E-mail : [email protected] / [email protected]
PENDIDIKAN
1994 – 2000 : SD Negeri Kadipaten 2000 – 2003 : SMP Negeri 1 Andong 2003 – 2006 : SMA Negeri 1 Andong
BAB I PENDAHULUAN 1.1.Latar Belakang Masalah
Roket merupakan salah satu wahana dirgantara yang memiliki makna strategis. Suatu bangsa yang mampu mengembangkan dan menguasai teknologi roket akan disegani oleh bangsa-bangsa lain di dunia. Hal ini karena roket sebagai wahana dapat dimanfaatkan untuk berbagai tujuan. Roket dapat dimanfaatkan sebagai wahana mengantarkan satelit ke orbitnya atau sebagai wahana antariksa dengan misi khusus [7].
Negara Indonesia dengan wilayah yang sangat luas sudah saatnya mempercepat penguasaan teknologi kedirgantaraan untuk mendukung kemandirian bangsa di sektor-sektor strategis lainnya seperti telekomunikasi, transportasi, pertanian bahkan pendidikan. Selain itu roket memiliki banyak manfaat, dengan dikembangkannya fungsi roket oleh LAPAN yaitu dengan cara menambahkan sebuah muatan dalam roket tersebut atau biasa disebut payload
roket, maka payload roket ini memiliki beberapa fungsi khusus diantaranya dapat digunakan untuk pemetaan suatu wilayah, pembuat hujan buatan atau juga untuk mengetahui keadaan cuaca suatu wilayah. Untuk dapat mengetahui keadaan cuaca suatu daerah perlu adanya sebuah alat yang mampu mengukur setiap perubahan suhu maupun kelembaban yang ada pada wilayah tersebut, dimana alat pengukuran tersebut dapat digunakan secara efektif. Teknologi roket yang begitu banyak menawarkan kegunaan, diperlukan juga tangan-tangan kreatif dari sumber daya manusianya.
1.2 Maksud dan Tujuan
Adapun maksud dari pembuatan tugas akhir ini adalah:
1. Memaksimalkan fungsi roket untuk pengukuran bidang meteorologi, khususnya mengukur besaran suhu dan kelembaban diudara.
Tujuan dari pembuatan tugas akhir ini adalah:
1. Merancang suatu sistem yang mampu mengetahui besaran suhu dan kelembaban pada suatu daerah tertentu
2. Merancang sistem telemetri suhu dan kelembaban pada payload roket yang handal dan tahan tehadap noise.
1.3 Metodologi Penelitian
Dalam penulisan laporan ini penulis menggunakan beberapa metodologi penelitian diantaranya :
1. Metode perancangan
Mengaplikasikan teori yang didapat dalam perancangan sistem untuk perangkat keras, perangkat lunak dan pengujian sistem.
2. Metode penelitian laboratorium
Melakukan uji coba dan analisi data pada laboratorium. 3. Metode Literatur
Suatu metode pengumpulan data dengan membaca atau mempelajari buku yang berhubungan dengan masalah yang menjadi topik tugas akhir. 4. Metode studi pustaka
Yaitu melakukan penelitian dengan mempelajari hal-hal yang berhubungan dengan pembuatan tugas akhir ini.
1.4Batasan Masalah
Beberapa batasan masalah dalm pengerjakan sistem yang dibuat adalah [7]: 1. Yang disebut sebagai payload adalah beban muatan roket berbentuk
tabung silinder berisi rangkaian elektronik dan sistem aktuator robotik yang berfungsi sebagai perangkat telemetri untuk meteorologi sekaligus memiliki sistem aktuator berbasis robotik.
3. Berat maksimum payload adalah 1000 gr (±1Kg).
4. Dimensi payload dapat berubah dengan ukuran yang tidak terbatas ketika telah terjadi separasi.
5. Payload harus memiliki sensor kompas (sifatnya wajib) yang data kompas ini harus dikirim terus-menerus ke ground segment sekaligus sebagai pemandu arah payload dalam mencapai target pendaratan sejak dari saat peluncuran hingga mendarat.
6. Payload juga harus memuat sensor accelerometer (sifatnya wajib) yang datanya harus dikirim secara terus-menerus ke ground segment untuk mengetahui performance roket RUM sejak dari peluncuran hingga terjadinya separasi (terpisahnya antara roket dan muatan roket setelah beberapa detik dari peluncuran sesuai timer yang diberikan) .
7. Payload dapat memiliki setidak-tidaknya dua macam sensor (sifatnya wajib) dari pilihan tiga macam sensor meteorologi yaitu, suhu, tekanan dan kelembaban.
8. Payload harus bersifat autonomus (self home positioning) sekaligus dapat berkomunikasi dengan sistem kendali operator di ground segmentt. 9. Fungsi payload dalam hal telemetri harus mampu mengukur dan
mengirim data dari sensor akselerasi dan setidak-tidaknya dua macam data dari sensor, suhu, tekanan dan kelembaban mulai dari tanda GO atau
START hingga payload mendarat baik tepat di target ataupun menyentuh bumi atau dalam waktu minimal 120 detik setelah tanda GO.
1.5.Sistematika Penulisan
Untuk mempermudah dalam penyusunan laporan tugas akhir, agar lebih jelas dan sistematis, maka penulis membaginya dalam sistematika penulisan yang terdiri dari beberapa bab pembahasan dengan urutan sebagai berikut :
Bab I Pendahuluan
Dalam bab ini dijelaskan mengenai latar belakang masalah, maksud dan tujuan, metode pengumpulan data, pembatasan masalah serta sistematika penulisan.
Bab II LANDASAN TEORI
Berisi tentang penjelasan teori yang menyangkut penulisan laporan yang dbuat, penjelasan singkat mengenai dasar-dasar teori topik yang ditulis serta teori tentang komponen yang dipakai.
Bab III PERANCANGAN SISTEM
Menjelaskan mengenai tahap-tahap perancangan sistem, mulai dari pemilihan komponen beserta alasannya, perancangan desain hingga menentukan algoritma yang dipakai dalam perancangan sistem.
IV UJI COBA DAN ANALISIS SISTEM
Bab ini akan menjelaskan hasil dan bahasan yang ditekankan pada perumusan masalah yaitu flowchart, listing program, serta prinsip kerja dari keseluruhan rangkaian.
Bab V SIMPULAN DAN SARAN
Dalam bab ini dikemukakan mengenai kesimpulan dari perancangan alat yang dibuat serta saran dari penulis.
DAFTAR PUSTAKA
Berisi referensi yang digunakan dalam penyusunan laporan. Referensi berasal dari buku, internet maupun dari laporan tugas yang sudah ada.
LAMPIRAN
berisi data sheet komponen yang dipergunakan, skematik rangkaian serta
BAB III
PERANCANGAN SISTEM
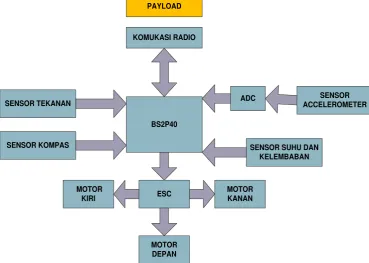
Pada bab ini akan dijelaskan mengenai komponen–komponen apa saja yang membangun sistem telemetri suhu dan kelembaban pada payload roket. Dibawah ini merupakan keseluruhan blok sistem yang dibuat.
BS2P40
ESC MOTOR
KANAN MOTOR
KIRI
SENSOR SUHU DAN KELEMBABAN SENSOR KOMPAS
SENSOR TEKANAN
SENSOR ACCELEROMETER KOMUKASI RADIO
ADC
MOTOR DEPAN PAYLOAD
Gambar III.1 Blok Diagram Sistem Payload
Tabel III.1 Keterangan diagram blok sistem payload
3.1Perancangan Hardware
Perancangan hardware meliputi perancangan desain, pemilihan komponen mikrokontroler, sensor yang digunakan, aktuator serta catu daya yang digunakan. 3.1.1 Rangkaian Matherboard Sensor-Sensor
Mikrokontroler yang digunakan adalah sebuah modul Basic Stamp 2P40 yang telah banyak dipasaran, alasan penggunaan mikrokontroler ini adalah karena jumlah pin pada basic stamp yang mencukupi kebutuhan hardware-nya, kemudahan dalam pemrograman khususnya sebagai pengendali aktuator yang diguanakan, berikut gambar dari basic stamp 2P40 yang digunakan:
No Blok Keterangan
1
Komunikasi radio
Berfungsi sebagai blok komunikasi yang menghubungkan seluruh blok sistem pada ground segment
2 BS2P40
Mengatur seluruh kerja blok sistem, mengolah data, mengambil keputusan kendali gerak aktuator.
3
Sensor Suhu Dan Kelembaban
Mengukur besaran suhu dan kelembaban disekitar
payload
Berfungsi mengukur besaran axelerasi yang dialami payload serta kecepatan payload
6 Sensor Tekanan
Mengukur besaran tekanan udara berdasarkan ketinggian payload.
7 ADC
Mengubah besaran analog dari sensor accelerometer menjadi besaran digital yang dapat dibaca mikrokontroler
8 ESC
(Elektronik Speed control) mengatur kecepatan putar motor.
9 Motor Depan
Mendorong payload setelah menemukan arah yang ditentukan
10 Motor Kanan
Menentukan arah berdasarkan bacaan dari sensor kompas
11 Motor Kiri
Gambar III.2 Basic Stamp 2P40
Untuk mempermudah koneksi antara sensor dengan pin-pin pada basic stamp maka dibuatlah sebuah PCB untuk meletakkan semua sensor yang langsung dapat terkoneksi dengan modul basic stamp
Gambar III.3 Skema Rangkaian Sensor-Sensor
Tabel III.2 Pin – pin yang digunakan pada Basic Stamp 2P40
PIN KETERANGAN
0 RX radio 1 TX radio 2 Data kompas 3 Clock kompas 4 Enable kompas
5 Clock Sht75
6 Data SHT75 7 Status MMA 8 ST MMA 9 Indikator LED 10 Data ADC
11 Clock ADC
12 CS ADC 13 Motor kiri 14 Motor kanan 15 Motor depan
3.1.2 Komunikai Serial
Proses pengiriman data dari mikrokontroler ke ground segment
menggunakan modul radio, dimana dalam perancangan ini pin pada basic stamp harus terhubung pada pin modul radio yang terpakai agar dapat mengirim data maupun menerima data dari ground segment. Pada peraturan KORINDO
baudrate yang harus digunakan adalah 9600. Jadi perlu adanya penyesuaian antara basic stamp dengan modul radio yang digunakan. Untuk penggunaan
baudrate pada basic stamp dapat dilihat pada tabel dibawah ini.
Pin RX pada modul radio digunakan sebagai pin untuk mengirimkan data dengan perintah dari basic stamp yaitu; Serout, Pin, Baudrate,[data yang dikirimkan], sedangkan untuk membaca data yang diterima maka pin TX pada modul radio disambungkan dengan pin basic stamp dan digunakan perintah;
Serin, Pin, Boudrate, variabel penyimpan data.
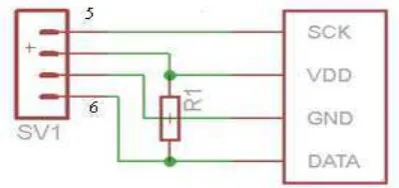
3.1.3 Rangkaian Sensor SHT75
Sensor SHT75 memiliki satu pin untuk mengeluarkan dua data yaitu data suhu dan data kelembaban, untuk mengaktifkan sensor Sht75 perlu diberikan sebuah command awal sebesar 00000101 untuk kelembaban dan 00000011 untuk temperatur. Untuk pin data diberikan sebuah resistor sebesar 10Kohm sebagai
pull-up.
Gambar III.4 Rangkaian Sensor Suhu dan Kelembaban
Untuk mendapatkan nilai besaran suhu dan kelembaban dari keluaran sensor yang berupa data digital digunakan persamaan berikut :
1. Sensor kelembaban
RHlinier=C1+C2.SORH+C3.SORH2 Dengan nilai C1, C2, dan C3:
2. Sensor suhu
Temperature = d1+d2.SOT
Table III.5 Konstanta pengali untuk mencari nilai suhu [9]
3.1.4 Rangkaian Sensor Kompas
Sensor kompas bekerja pada tegangan 5VDC, pin data input dan data output disatukan untuk jalur data keluarannya, diperlukan juga sebuah data clock untuk dapat mengambil data dari kompas karena datanya bersifat serial
Gambar III.5 Skematik Sensor Kompas [4]
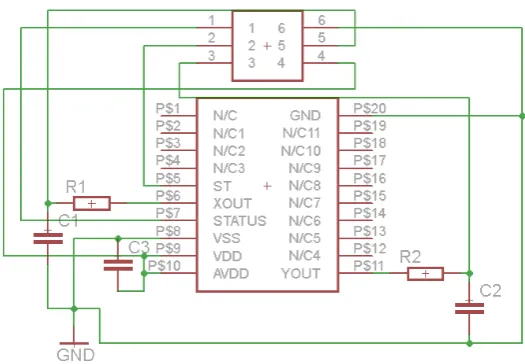
3.1.5 Rangkaian Sensor Percepatan
Sensor ini akan mengukur akselerasi gerak dari payload dengan satuan g. Data yang digunanakan adalah data dari axis X dan juga axis Y, apabila kedua data ini akan dijadikan dalam besaran derajat maka dapat dihitung menggunakan rumus angle= ArcusTAN (X/Y), serta apabila data yang sudah menjadi besaran derajat ingin dirubah menjadi besaran dalam g kembali, maka dapat digunakan rumus x=sinangle dan y=cosangle. Berikut gambar dari rangkaian accelerometer
Gambar III.6 Rangkaian Accelerometer 3201
3.1.6 Catu Daya
Catu daya merupakan faktor yang penting dalam perancangan sebuah sistem telemetri suhu dan kelemababanini, karena tanpa adanya sebuah catu daya maka sistem ini tidak akan mampu untuk bekerja. Catu daya ini berfungsi untuk mencatu mikrokontroler, semua sensor yang digunakan, aktuator serta radio komunikasinya.
Catu daya pada aktuator menggunakan sumber tegangan sebesar 11,1Vdc dan 5Vdc sedangkan pada mikro dan sensor membutuhkan sumber sebesar 5Vdc. Pada mikrokontroler telah tersedia regulator 5V sebagai penurun tegangan sedangkan pada aktuator tidak diperlukan sebuah rangkaian penurun tegangan.
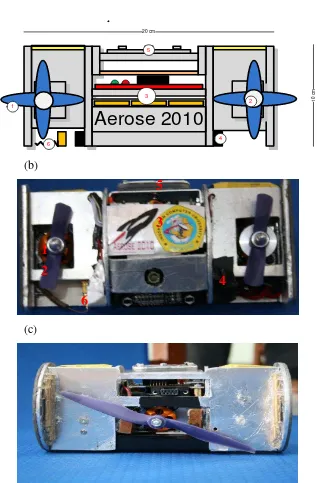
3.1.7 Desain Payload
tiga buah propeller sebagai pengendali gerak payload, propeller kiri dan kanan berfungsi untuk mencari sudut yang telah ditentukan, sedangkan bagian depan berfungsi sebagai pendorong payload jika sudut yang dicari telah ditemukan.
(a)
Aerose 2010
20 cm1
0
cm
1
6
2 3
4 5
(b)
(c)
Gambar III.7 Rancangan Desain Payload, (a)Desain awal, (b) Tampak depan, (c) Tampak belakang
1
2
3
4
5
Keterangan gambar III.7 :
1. Propeller
2. Motor
3. Mikro dan sensor-sensor 4. Baterai
5. Tempat gantungan tali 6. Radio
3.2 Perancangan Software
Perancangan software merupakan hal yang penting dalam perancangan sistem kendali pada payload ini. Pada bagian ini yang nantinya akan dijadikan sebagai algoritma kendali dari keseluruhan kerja payload. Seluruh algoritma dituliskan pada sebuah Basic Stamp Editor v2.2 dan kemudian disimpan pada sebuah IC mikrokontroler BS2p40, maka secara otomatis mikrokontroler BS2p40 akan mengerjakan seluruh program yang dimasukkan kedalamnya.
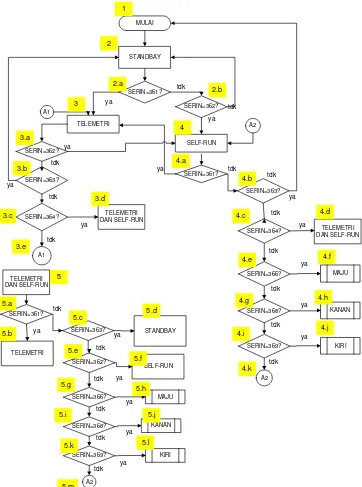
3.2.1 Algoritma Dasar
Merupakan sebuah algoritma yang mendasari seluruh algoritma yang ada dalam payload. Algoritma inilah yag nanti akan dikembangkan menjadi algoritma-agoritma yang lebih spesifik lagi.
MULAI
Gambar III.8 Flowchart Pemrograman
Keterangan gambar dari flowchart diatas dapat dilihat pada tabel III.6 dibawah ini. Tabel ini menerangkan alur program yang ada dalam flowchart
Tabel III.6 Keterangan gambar 3.6
No Keterangan
1 Mulai program dijalankan
2 Rutin standby dimana mikrokontroler tidak mengejakan apapun
a
Jika data = 361 maka lompat ke rutin Telemetri jika tidak lanjut ke b
b
Jika data = 362 maka lompat ke rutin self-run jika tidak balik keawal
3 Rutin Telemetri
a Jika data = 362 maka lompat ke rutin self-run jika tidak lanjut ke c b Jika data = 363 maka lompat ke rutin Standby jika tidak lanjut ke d c Jika data = 364 maka lompat ke d jika tidak lanjut ke e
d Telemetri dan Self-run e Ulangi dari awal Telemetri
4 Rutin self-run
a
Jika data = 361 maka lompat ke rutin Telemetri jika tidak lanjut ke b
b Jika data = 363 maka lompat ke rutin Standby jika tidak lanjut ke c c Jika data = 364 maka lompat ke d jika tidak lanjut ke e
d Telemetri dan Self-run
e Jika data = 366 maka lompat ke f jika tidak lanjut ke g
k Mulai dari awal Program Self-run
5 Rutin telemetri dan self-run
a Jika data = 361 maka lompat ke b jika tidak lanjut ke c b Rutin telemetri
m Mulai dari awal Program Self-run
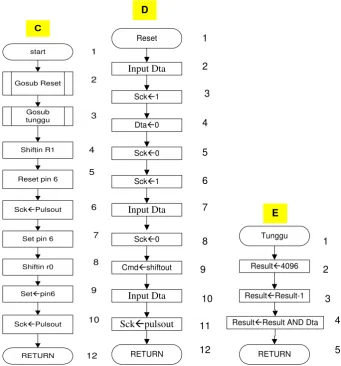
3.2.2 Prosedur Sensor Sht75
ResultßResult AND Dta
E
Gambar III.10 Flowchart Pemrograman Sensor Sht75
Berikut ini adalah tabel keterangan dari flowchart pemrograman Sht75, setiap alur program diceritakan dalam tabel dibawah ini.
Tabel III.7 Keterangan gambar 3.7
No KETERANGAN
A Rutin Menghitung kelembaban
1 Mulai
2 Berikan nilai awal (command) = 5 3 Lompat ke sub ruin start
4 s/d 8 Lakukan perhitungan mencari rh B Rutin Menghitung Suhu
2 Berikan nilai awal (command) = 3 3 Lompat ke sub rutin start
4 s/d 5 lakukan perhitungan mencari nilai suhu C Sub Rutin awal
6 Berikan sebuah pulsa pada pin sck 7 Set pin 6
8
Ambil data dengan sebuah clock dan simpan data pada R0
9 Set pin 6 menjadi 1
10 Berikan pulsa pada pin sck 12 Kembali ke program utama D Sub Rutin Reset
1 Mulai sub rutin
2 Pin data aktif dan dapat diambil data saat nilai hight 3 Set pin sck menjadi 1
4 Set pin data menjadi 1 5 Reset pin sck
6 Set pin sck menjadi 1
7 Pin data aktif dan dapat diambil data saat nilai hight 8 Reset pin sck
9 Beri pulsa pada cmd untuk mengeluarkan data 10 Pin data aktif dan dapat diambil data saat nilai hight 11 Berikan pulsa pada pin sck
12 Kembali keprogram utama
E Delay
1 Sub rutin tunggu 2 Result=4096 3 Result-1
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Teknik Komputer Diploma Tiga (D-III) Jurusan Teknik Komputer
Disusun Oleh :
SUGENG
10807020
Pembimbing : Agus Mulyana, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
Pemanfaatan roket dalam bidang meteorologi menawarkan kemudahan dalam pengerjaannya. Selain lebih efisien juga hemat biaya. Roket yang terisi muatan roket (payload) serta dilengkapi dengan berbagai sensor untuk misi khusus seperti penginderaan cuaca, dilengkapi juga dengan sistem telemetri serta telecommand. Sistem telemetri ini nantinya akan mengirimkan sebuah data secara realtime atau terus menerus dari pembacaaan sensor yang ada. Pengiriman dilakukan melalui sebuah gelombang radio dengan frekuensi antara 128-134 MHz. Sistem komunikasi yang ada dalam payload ini adalah bersifat Half Duplex, dimana dapat melakukan komunikasi dua arah namun secara bergantian. Hasil penginderaan sensor
meteorologi yang ada dalam payload diolah terlebih dahulu kemudian dikirimkan ke
ground segment. Di ground segment data yang telah diterima dianalisis keakurasiannya serta ketelitiannya kemudian data tersebut disajikan dalam bentuk tabel beserta informasi yang didapatkan. Sistem telecommand pada payload berfungsi sebagai pengendali arah gerak payload agar dapat kembali ke home. Pengendalian arah gerak ini mengacu dari sensor kompas yang terpasang pada payload.
BAB II
LANDASAN TEORI
2.1 Pengertian Sistem Telemetri Suhu dan KelembabanKata telemetri berasal dari akar bahasa yunani yaitu tele = jarak jauh, dan
metron = pengukur. Telemetri berarti sebuah teknologi yang memperbolehkan pengukuran jarak jauh dan melaporkan informasi kepada perancang atau operator sistem baik menggunakan kabel maupun tanpa menggunakan kabel (wireless). Selanjutnya data tersebut dapat digunakan secara langsung maupun perlu dianalisi terlebih dahulu. Secara umum telemetri terdiri dari enam bagian umum yaitu obyek ukur, sensor, pemancar, saluran transmisi, penerima dan tampilan. Sistem telemetri yang digunakan dalam komunikasi ini adalah sebuah perangkat komunikasi radio yang bersifat half duplex, dimana komunikasi yang dapat dilakukan adalah komunikasi dua arah namun secara bergantian.
Suhu atau temperatur udara adalah derajat panas dari aktivitas molekul dalam atmosfer. Alat untuk mengukur suhu atau temperatur udara atau derajat panas disebut termometer. Biasanya pengukuran suhu atau temperatur udara dinyatakan dalam skala Celcius (C), Reamur (R), dan Fahrenheit (F).
Kelembaban udara adalah banyaknya uap air yang terkandung dalam massa udara pada saat dan tempat tertentu. Alat untuk mengukur kelembaban udara disebut
psychrometer atau hygrometer. Kelembaban udara dapat dibedakan menjadi: 1. Kelembaban mutlak atau kelembaban absolut, yaitu kelembaban yang
menunjukkan berapa gram berat uap air yang terkandung dalam satu meter kubik udara.
2.2 Metode Transmisi
Ada tiga macam metode transmisi data, tiga metode tersebut adalah [6]:
1. Simplex
a. Sinyal ditransmisi dalam satu arah
b. Stasiun yang satu bertindak sebagai transmiter dan yang lain sebagai
receiver, tugasnya adalah tetap.
c. jarang digunakan untuk sistem komunikasi data
Gambar II.1 Blok metode transmisi simplex
2. Half Duplex
a. Sinyal ditransmisikan ke dua arah secara bergantian
b. Kedua stasiun dapat melakukan transmisi tetapi hanya sekali dalam suatu waktu
Gambar II.2 Blok metode transmisi half duplex
3. Full Duplex
a. Sinyal ditransmisikan ke dua arah secara simultan / bersamaan
Gambar II.3 Blok metode transmisi simplex
2.3 Perangkat Keras
2.3.1 Mikrokontroler Basic Stamp BS2P40
Mikrokontroler merupakan sebuah IC yang berfungsi sebagai pengendali perangkat–perangkat lain yang terhubung dengan mikrokontroler tersebut. Pada perancangan ini mikrokontroler berfungsi sebagai pengendali arah gerak payload
secara manual maupun otomatis. Pada perancangan ini digunakan sebuah modul BS2p40 yang telah banyak tersedia dipasaran.
Alasan pemilihan mikrokontroler BS2p40 [1]:
1. MikrokontrolerBasic Stamp 2p40 interpreter chip (PBASIC48W/40P) 2. 8 x 2Kbyte EEPROM yang mampu menampung hingga 4.000 interuksi 3. Kecepatan prosesor 20MHz turbo dengan kecepatan eksekusi program
hingga 12.000 instruksi perdetik
4. RAM sebesar 38 byte (12 I/O,26 variabel) dengan Scratch Pad sebesar 128 byte
5. Jalur I/O sebanyak 32 pin dengan kemampuan suplai arus sebesar 30mA per pin dan 60 mA per 8 pin
6. Tersedia jalur komunikasi serial UART RS-232 dengan konektor DB-9 7. Tegangan input 9-12 VDC dan tegangan output 5 VDC
2.3.2 Diskripsi Pin Basic Stamp 2P40
Berikut ini merupakan tabel diskripsi pin-pin yang ada dalam BS2P40 beserta keterangannya
Tabel II. 4. Diskripsi pin BS2P40 [1]
Pin Nama Keterangan
1 SOUT
Serial Out untuk pemrograman yang terkoneksi ke PC pada port di pin RX(DB9 PIN2/DB25 PIN3)
2 SIN
Serial input untuk pemrograman yang terkoneksi ke PC pada port di pin TX(DB9 PIN3/DB25 PIN2)
3 ATN
4 VSS
Serial data untuk pemrograman yang terkoneksi ke PC pada port di pin DTR (DB9 PIN5/DB25 PIN7)
5-20 P0-15 PIN I/O dimana logika high = 5 V dan Low= 0V
21-36 X0-15
PIN I/O sekunder (Auxiliary) dimana logika high = 5 V dan Low= 0V
21&37 VDD Pin input tegangan sebesar 5V 22 & 38 RES PIN reset
23 & 39 VSS PIN Ground mikrokontroler
24 & 40 VIN
PIN input tegangan yang dilewatkan regulator 5V, membutuhkan sumber sebesar 5,5 -12VDC
Sedangkan gambar dibawah ini menunjukan konfigurasi pin-pin pada BS2P40
2.3.3 Modul Telemetri
Media telemetri yang digunakan yaitu menggunakan frekuensi radio. Untuk menunjang telemetri tersebut digunakan dua buah modul radio yaitu Hua-Wei YS-1020U. Gambar dari radio tersebut adalah sebagai berikut :
Gambar II.5 YS-1020U
Berikut merupakan tabel keterangan pin pada modul radio YS-1020U yang digunakan dalam perancangan sistem ini:
Tabel II.2 Susunan pin radio YS-1020U [10]
PIN NAMA PIN FUNGSI LEVEL
1 GND Ground
2 VCC Tegangan input +3,3- 5,5V
3 RXD/TTL Input serial data TTL
4 TXD/TTL Output serial data TTL
5 DGND Digital grounding
6 A(TXD) A of RS-485 or TXD of RS-232 7 B(RXD) B of RS-485 or RXD of RS-232
8 SLEEP Sleep control(input) TTL
9 RESET Reset(input) TTL
2.3.4 Sensor Suhu dan Kelembaban
Sensor suhu dan kelembaban yang digunakan adalah SHT75. Sensor ini adalah sebuah chip yang dapat mengukur suhu dan kelembaban sekaligus. Penggunaan sensor ini dengan pertimbangan ukurannya yang kecil dan juga kehandalannya. Keluaran dari sensor ini sudah berupa data digital karena didalam
chip ini telah terdapat sebuah ADC sebesar 14bit. Rentang pengukuran suhu antara -40-123,80C dan kelembaban antara 0-100 %Rh. Keakurasian pengukuran mencapai ±0,3 setiap kenaikan 25ºC untuk temperatur dan ±1,8 %RH untuk kelembaban
Berikut ini gambar sensor suhu dan kelembaban SHT75 :
Gambar II.6 Sensor suhu dan kelembaban
Resolusi pengukuran default dari sensor ini adalah 14 bit untuk sensor suhu dan 12 bit untuk sensor kelembaban, dapat juga menggunakan resolusi hanya 12 bit dan 8 bit. Adapun sensor suhu dan kelembaban berbentuk digital yang digunakan sebagai pembanding saat melakukan percobaan adalah sebagai berikut :
2.3.5 Sensor Accelerometer
Merupakan sebuah sensor yang digunakan untuk mengukur percepatan gerak dari payload ketika payload mulai diluncurkan sampai payload tersebut sampai di home kembali, sensor ini memiliki ketahanan terhadap gaya gravitasi sebesar 20g pada axis X dan axis Y. Keluaran sensor masih berupa data analog sehingga perlu adanya sebuah ADC untuk mengolah datanya. Data yang dikeluarkan bersifat linier berupa axis X dan Y, kedua data ini menentukan akselerasi gerak payload.
Gambar II.8 Accelerometer MMA 3201
2.3.6 Sensor Kompas
Gambar II.9 Sensor kompas HM55B
2.3.7 Modul Sensor Tekanan
Merupakan sebuah sensor yang diguakan untuk mengukur tekanan udara pada tempat tertentu. Sensor ini juga dapat digunakan unutk menentukan ketinggian payload saat payload tersebut diluncurkan. Sensor tekanan yang diggunakan memakai sebuh modul DT-Sense Barometric Pressure and Temperature Sensor yang merupakan modul sensor berbasis sensor HP03 yang dapat diggunakan medeteksi besarnya tekanan dan temperatur udara disekitar sensor. Modul ini dilengkapi dengan antarnuka UART TTL, serta keluaran data yang telah berbentuk digital sehingga tidak perlu melakukan perhitungan yang telalu banyak. Spesifikasi modul tekanan sebagai berikut:
1. Catu daya sebesar 4,8-5,5
2. Range sensor tekanan udara antara 300-1100hpa (ss) hPa = 1milibar 3. Akurasi sensor tekanan udara ±1,5hPa
4. Resulosi sensor tekanan 0,1 hPa 5. Range sensor temperature -20-60 0C 6. Akurasi sensor temperature ±0,8 0C 7. Resulosi sensor temperaure 0,1 0C
Tabel II.3 Konfigurasi pin pada modul DT-sense barometric pressure and temperature sensor
PIN Nama Fungsi
1 GND Titik referensi untuk catu daya input 2 VCC Terhubung ke catu daya (4,8-5,5 v) 3 RX Input serial level TTL ke modul 4 TX Output serial level TTL dari modul
5 MAIN
SDA
I2C-bus data input/ouput
6 MAIN
SCL
I2C bus clock input
Untuk menghitung hasil keluaran dari sensor dapat digunakan rumus tekanan =(data MSB X 256 + data LSB)X10 (dalam satuan hpa)
Tekanan udara dapat dibedakan menjadi 3 macam, yaitu: 1. Tekanan udara tinggi, lebih dari 1013 mb. 2. Tekanan udara rendah, kurang dari 1013 mb. 3. Tekanan di permukaan laut, sama dengan 1013 mb.
Gambar II.10 DT-sense baromatric pressure and temperature sensor
2.3.8 ADC
dapat diterima mikrokontroler pada satu pin saja. ADC ini memiliki resolusi sampai dengan 8 bit dengan 4 chanel analog multiplaxer, dapat bekerja dengan
supply tegangan sebesar 0-5VDC. Berikut gambar dari ADC0833
Gambar II.11 ADC0833
2.3.9 Modul Aktuator
Perancangan sistem telemetri ini dilengkapi juga sistem aktuator sebagai pengendali arah gerak payload. Aktuator dari payload terdiri dari tiga buah motor
brushless yang dilengkapi propeller sebagai pendorongnya. Motor pada bagian kiri dan kanan digunakan sebagai navigasi dan bagian depan sebagai pendorong untuk maju . Motor brushless memiliki sebuah ESC (Elektronic Speed Control)
yang berfungsi sebagai pengatur kecepatan motor, selain itu juga berfungsi untuk menaikan jumlah arus yang diperlukan oleh motor. Kecepatan untuk motor yang keluar dari ESC diatur melalui pulsa dari mikrokontroler
Gambar II.12 Motor Brushless dan Propeller
2.3.10 Catu Daya
mikrokontroler dan komponen lain yang digunakan. Baterai ini memiliki daya sebesar 11,1V dan arus sebesar 1800mA. Baterai LIPO ini memiliki ketahanan pemakaian selama 10 menit, tidak boleh terpasang dengan motor maupun komponen lain selama lebih dari 5jam dan harus segera di-charger sebelum batas minimal dari tegangan baterai itu sendiri. Berikut ini gambar dari baterai yang digunakan.
Gambar II.13 Baterai LIPO (Lithium Polimer)
2.4 Perangkat Lunak
Perangkat lunak digunakan sebagai tempat untuk menulisan program yang mengendalikan seluruh kerja payload. Untuk memasukan program kedalam mikrokontroler maka digunakan basic stamp editor v2.2 yang langsung dapat mengkompail file menjadi bentuk .hex sehingga dapat dimengerti oleh mesin.
2.4.1 Basic Stamp Editor V2.2
Basic Stamp Editor v2.2 adalah program basic compiler berbasis windows
Gambar II.14 Tampilan jendela program Basic Stamp Editor v2.2
Program Basic Stamp Editor v2.2 dilengkapi juga dengan sebuah terminal untuk melihat data komunikasi serial dari perangkat luar. Semua data yang dikirim dari mikrokontroler ke perangkat luar atau dari perangkat luar ke mikrokontroler dapat dilihat langsung dalam terminal ini.
Gambar II.15 Terminal Basic Stamp Editor v2.2
2.4.2 Visual Basic
Visual Basic adalah salah suatu developement tools untuk membangun aplikasi dalam lingkungan Windows. Dalam pengembangan aplikasi, Visual Basic menggunakan pendekatan Visual untuk merancang user interface dalam bentuk
form, sedangkan untuk pemprogramannya menggunakan bahasa basic yang cenderung mudah dipelajari. Visual Basic telah menjadi tools yang terkenal bagi para pemula maupun para pengembang.
berinteraksi dengan User-interface tanpa menyadari bahwa dibelakangnya berjalan instruksi-instruksi program yang mendukung tampilan dan proses yang dilakukan.
Pada pemrograman Visual, pengembangan aplikasi dimulai dengan pembentukkan user interface, kemudian mengatur properti dari objek-objek yang digunakan dalam user interface, dan baru dilakukan penulisan kode program untuk menangani kejadian-kejadian atau event.
Program visual basic yang dibuat berfungsi sebagai ground segment, dimana ground segment ini berfungsi untuk menampung semua data yang dikirimkan dari payload, selain itu ground segment ini juga berfungsi sebagai pengendali arah gerak payload, dimana payload dapat diarahkan sesuai dengan kehendak user.
Berikut merupakan jendela dari visual basic jika dijalankan
Gambar II.16 Jendela pengaktifan program visual basic
Jendela ini akan muncul saat pertamakali membuka program visual basic,
pilih Standard EXE klik tombol “Open” maka akan muncul jendela utama seperti
Gambar II.17 Tampilan jendela visual basic ketika pertama kali dijalankan
BAB IV
UJI COBA DAN ANALISIS SISTEM
Kehandalan dan keberhasilan dari sistem yang dibuat dapat diketahui dengan dilakukannya sebuah pengujian terhadap alat yang telah dibuat terutama pada bagian sensor yang dipergunakan.
4.1 Komunikasi
Peranan modul radio sangat penting dalam perancangan sistem ini karena modul radio inilah yang akan membuat data diterima pada ground segment saat proses telemetri maupun pada payload saat proses telecommand. Untuk mengetahui kinerja dari modul radio ini maka diperlukan sebuah uji transmisi data dari radio satu ke radio yang lain dengan cara mengirimkan data dari jarak terdekat sampai jarak terjauh dari jangkauan frekuensi radio. Pada modul radio telah dilengkapi dengan sebuah software yang mampu mengirimkan data maupun menerima data antar radio, selain itu radio harus mampu berkomunikasi dengan mikrokontroler.
Pada mikrokontroler Basic Stamp 2P40 dilengkapi dengan komunikasi serial untuk dapat berkomuikasi dengan perangkat luar. Untuk dapat membaca data dari luar digunakan perintah Serin dan bila ingin mengirimkan sebuah data keperangkat lain digunakan perintah Serout. Listing program untuk komukasi data serial sebagai berikut :
Serin 1,240,50,next1,a
Serout 1,240,[“data yang akan dikirim”]
Serin/serout = perintah baca/tulis data serial 1 = pin pada basic stamp
240 = baudrate pengganti 9600 50 = waktu tunda
4.2 Sensor Suhu dan Kelembaban
Suhu dan kelembaban pada satu tempat dangan tempat lain pasti sangat berbeda, di dalam ruangan dan di luar ruangan pun pasti ada perbedaanya. Dengan sensor Sht75 pengukuran dapat dilakukan baik didalam ruangan maupun diluar ruangan, hasil pengukuran yang didapat langsung dikirimkan melalui frekuensi radio dan langsung dapat diterima oleh komputer untuk dilihat nilainya. Sebagai pembanding digunakan sebuah sensor suhu dan kelembaban digital yang sudah banyak tersedia dipasaran. Hasil pengujian yaitu sebagai berikut:
4.2.1 Pengujian di Dalam Ruangan
Pengujian ini dilakukan dalam ruangan laboratorium komunikasi data yang ditampilkan dalam sebuah terminal yang ada dalam software Basic Stamp, data yang didapat adalah sebagai berikut :
Gambar IV.I Hasil pengujian sensor suhu dan kelembaban pada terminal BS
Editor V2.2
Tabel IV.1 Hasil pengujian sensor Suhu Dan Kelembaban
NO
DATA SENSOR DATA ALAT UKUR SUHU
Terjadi sedikit perbedaan saat pengujian didalam ruangan dengan sensor pembanding yang digunakan, maka dari data pengukuran tersebut dapat dicari nilai akurasi dari sensor suhu dan kelembaban dengan tabel berikut:
Tabel IV.2 Nilai akurasi sensor suhu dalam persen (%)
No
∑ 19.6381683 980.3618317
Tabel IV.3 Nilai akurasi kelembaban suhu dalam persen (%)
∑ 51.48587618 948.5141238
rata-rata 5.148587618 94.85141238
Dapat dilihat dari tabel IV.2 dan IV.3 bahwa nilai akurasi dari sensor suhu dan kelembaban mencapai lebih dari 90%, artinya bisa dikatakan bahwa sensor ini dapat bekerja dengan baik. Hasil tersebut dihitung menggunakan rumus Error = (Nilai data sensor - nilai data alat pembading)/ nilai hasil data alat
pembading * 100% Akurasi = 100% - Error
4.3 Data Hasil Peluncuran
Data ini merupakan data hasil peluncuran roket dan didalamnya terdapat sebuah payload yang dilakukan pada hari minggu, 27 juni 2010 di pantai Pandansimo, desa Ngentak, kabupaten Bantul, kota Jogjakarta sekitar jam 09.00 WIB.
1000 30 99 112 195
Data diatas merupakan sedikit data yang diambil dari hasil peluncuran, sebelum roket diluncurkan kebanyakan data yang diterima adalah sama, kemudian saat mulai diluncurkan data tersebut mulai berubah sampai data tersebut berhenti karena payload tak dapat megirim data kembali.
Berikut adalah seluruh data yang mengalami error saat proses pegiriman diakukan :
Tabel IV.5 Data sensor SHT 75 yang mengalami error saat pengiriman
No Data suhu yang error No Data kelembaban yang error
139 402002 02y 106 125 189 3 402018 029 q06 125 189
145 40200r 02¹ 106 125 189 17 402018 029 q06 125 189
163 402002 230 100 125 189 90 402002 029 q06 125 189
172 402002 230 100 125 189 261 402926 030 p85 128 244
173 402002 230 100 125 189 262 402932 030 p84 128 243
Terjadi beberapa data error pada pegiriman sensor Sht75 saat semua sensor telah terintegrasi pada payload, pada percobaan pertama sebelum semua sensor diintegrasikan dengan payload, hampir tidak ada data yang error sama sekali dalam pengiriman datanya, dapat dilihat pada tabel pengujian 4.2. Data yang
error kemungkinan karena jarak yang jauh dan pekerjaan mikro yang semakin banyak menggangu proses transmisi data.
Dari data hasil peluncuran didapatkan jumlah data yang diterima pada
ground segment saat peluncuran sebanyak 271 data dengan lama waktu sebesar 5 menit 41 detik, data sensor suhu dan kelembaban yang mengalami error sebanyak 12 data, sehingga dapat dihitung beberapa rumusan yaitu :
Jumlah data = 271 Data baik = 259 Data error = 12
Waktu pengiriman = 341 a. T = Rata-rata pengiriman
T = waktu pengiriman/jumlah data = 341/271
= 1,258s
b. Nilai akurasi pegiriman = 259/271X100= 95,57%
Data yang diterima pada ground segment tidak kontinyu karena dalam
ground segment langsung menerima data tanpa diberi timer. Data mengalami
BAB V
SIMPULAN DAN SARAN
5.1 SimpulanBerdasarkan hasil pengujian dan pelucuran yang telah dilakukan, serta setelah dianalisis datanya, maka dapat disimpulkan beberapa hal, diantaranya:
1. Sensor Sht75 dapat mengukur besaran suhu dan kelembaban dengan nilai akurasi berturut sebesar 98.03% dan 94.85% dari alat ukur digital yang digunakan sebagai pembanding.
2. Telemetri suhu dan kelembaban dapat dilakukan dengan baik pada saat roket diluncurkan maupun sebelum roket diluncurkan dengan kecepatan pengiriman data 1,25s/frame data
3. Pegukuran sensor suhu dan kelembaban SHT75 terbatas pada ruangan, artinya hanya mampu mengukur dalam ruangan dimana sensor tersebut ditempatkan atau dalam ruangan yang menutupinya, namun diluar ruangan sensor dapat bekerja secara optimal.
4. Kesalahan pengiriman data tidak dapat diprediksi karena banyak faktor yang mungkin mempengaruhinya, seperti jarak yang jauh dan noise yang tidak dapat diprekdisi.
5.2 Saran
Bagi rekan mahasiswa yang ingin mengembangkan tugas akhir ini, maka penulis memberikan sedikit saran agar peracangan selanjutnya menghasilkan sebuah sistem yang lebih handal, diantaranya yaitu :
1. Pada bagian pemrograman, perintah serin tidak perlu digunaka delay
2. Penggunaan dua mikrokontroler akan meningkatkan kinerja payload baik dari segi telemetri maupun telecommand serta saat melakukan self-run
Gambar 2.1 Blok metode telmetri simplex ... 6
Gambar 2.2 Blok metode telmetri half duplex ... 6
Gambar 2.3 Blok metode telmetri full duplex ... 6
Gambar 2.4 Konfigurasi Pin Basic Stamp ... 8
Gambar 2.5 Radio YS-1020U ... 9
Gambar 2.6 Sensor suhu dan kelembapan ... 10
Gambar 2.7 Termometer digital ... 10
Gambar 2.8 Sensor MMA 3201 ... 11
Gambar 2.9 Sensor Kompas ... 12
Gambar 2.10 DT-Sesnse barometric pressure ad temperature sesor ... 13
Gambar 2.11 ADC 0833 ... 14
Gambar 2.12 Motor Brushless dan propeller ... 14
Gambar 2.13 Baterai Lipo ... 15
Gambar 2.14 Jendela Basic Stamp ... 16
Gambar 2.15 Terminal Basic Stamp ... 16
Gambar 2.16 Jendela Pengaktifan Viual Basic ... 17
Gambar 2.17 Tampilan form visual Basic ... 18
Gambar 3.1 Blok Diagram sistem Payload ... 19
Gambar 3.2 Basic Stamp 2P40 ... 21
Gambar 3.3 Skematik rangkaian sensor-sensor ... 21
Gambar 3.4 Rangkaian sensor suhu dan kelembapan ... 24
Gambar 3.5 Skematik Sensor Kompas ... 24
Gambar 3.6 Rangkaian sensor accelerometer ... 25
Gambar 3.7 Rancangan Desain Payload ... 26
Gambar 3.8 Flowchart Pemrograman ... 28
Gambar 3.9 Flowchart Pemrograman Sensor SHT75 ... 29
LEMBAR PENGESAHAN ... ii
2.1. Pengertian Sistem Telemetri, Suhu dan kelembapan ... 5
2.1.1 Kelembaban Mutlak... 5
2.3.1. Mikrokontroler Basic Stamp BS2P40 ... 7
2.3.2. Diskripsi Pin Pada Basic Stamp ... 7
2.3.3. Modul Telemetri ... 9
2.3.4. Sensor Suhu dan Kelembaban ... 10
2.3.5. Sensor Accelerometer... 11
2.3.6. Sensor Kompas... 11
2.3.7. Modul Sensor Tekanan... 12
2.3.8. ADC... 13
2.3.9. Modul aktuator... 14
2.3.10. Catu daya……….. 14
2.4. Perangkat Lunak………. 15
2.4.1 Basic Stamp Editor V2.2... 15
3.1. Perancangan Hardware ... 20
3.1.1 .Rangkaian Matherboard Sensor-Sensor... 20
3.1.2. Komunikasi Serial... 22
3.1.3. Rangkaian SHT75... 23
3.1.4. Rangkaian Sesor Kompas... 24
3.1.5. Rangkaian Sensor Percepatan... 24
3.1.6. Catu Daya………... 25
3.1.7. Desain Payload.………... 25
3.2. Perancangan Software………. 27
3.2.1.Algoritma Dasar... 27
3.2.1.Prosedur Sensor Sht75... 30
BAB IV UJI COBA DAN ANALISIS SISTEM ... 33
4.1. Komunikasi ... 33
4.2. Sensor Suhu dan Kelembaban ... 34
4.2.1.Pengujian Dalam Ruangan………..…… 34
4.3. Data Hasil Peluncuran... 36
BAB V SIMPULAN DAN SARAN ... 39
5.1. Simpulan ... 39
5.2. Saran ... 39
DAFTAR PUSTAKA ... 41
38
DAFTAR PUSTAKA
[1] Electronics Innovative, BASIC Stamp Syntax and Reference Manual. Diakses dari http://www.parallax.com
[2] http://forum.parallax.com/Public Forums/stamps In Claa/PID Control Intro whit the Basic Stamp
[3] http://www.freescale.com/support
[4] http://parallax.com/detail.asp?product id=29123(Hitachi HM55B Compass Module Source code.zip)
[5] Ismail Yusuf, 2009, Pengembangan Inkubator Bayi Berbasis ATMEGA 8535, Bandung: UNIKOM
[6] Lamsani , Missa, Komunikassi data. Diakses bulan juni 2010 dari http:// WWW.SolidPDF.com
[7] LAPAN, (2010), Buku Panduan Perlombaan KORINDO 2010. Jakarta: Derektorat Jendral Pendidikan Tinggi.
[8] Nizar Taufiq Nuzwir & Harmoko Tondho, 2008, Perancangan dan Implementasi Robot Cerdas Pemadam Api Expert Swarm (DU 102), Bandung: UNIKOM
Tabel 2.1 Diskripsi Pin Basic Stamp ... 7
Tabel 2.2 Susunan Pin Radio YS-1020U ... 9
Tabel 2.3 Konfigurasi Pin Sensor Tekanan ... 13
Tabel 3.1 Keterangan diagram blok system payload ... 20
Tabel 3.2 Penggunaan Pin Pada Basic Stamp ... 22
Tabel 3.3 Pemakaian baudrate Pada Basic Stamp ... 22
Tabel 3.4 Konstanta pengali untuk mncari nilai kelembaban ... 23
Tabel 3.5 Konstanta pengali untuk mencari nilai suhu ... 24
Tabel 3.6 Keterangan gambar 3.6 ... 29
Tabel 3.7 Keterangan gambar 3.7 ... 31
Tabel 4.1 Uji Sensor Suhu dan Kelembaban ... 35
Tabel 4.2 Nilai akurasi sensor suhu dalam persen(%) ... 35
Tabel 4.3 Nilai akurasi sensor kelembaban dalam persen(%) ... 36
Tabel 4.4 Data hasil peluncuran... 36
KATA PENGANTAR
Assalamu’alaikum Wr.Wb
Puji syukur senantiasa kami panjatkan kehadirat Allah SWT yang telah memberikan rahmat dan hidayah-Nya sehingga tugas akhir dengan judul “Sisitem Telemetri Suhu dan Kelembaban pada Payload Roket” dapat diselesaikan tepat pada waktunya. Tugas akhir ini disusun sebagai salah satu syarat kelulusan mempuh pendidikan program studi diploma tiga (D3) pada Jurusan Teknik Komputer, Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
Tugas akhir ini mencakup perancangan perangkat keras dan implementasi kendali otomatis untuk menuju area yang ditentukan, mengirimkan data telemetri, kendali manual (Telecomand) untuk kendali arah gerak yang diinginkan. Dalam perancangan tugas akhir ini terdapat pembagian pembahasan yang dikerjakan oleh masing–masing pihak sesuai dengan topik yang dikerjakan.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kesempurnaan, mengingat keterbatasan pengetahuan, keilmuan, pengalaman serta referensi yang penulis miliki. Adapun kritik dan saran yang membangun bagi penulis sangat diharapkan. Dalam penulisan laporan ini penulis sangat banyak mendapatkan bantuan dari berbagai pihak, sehinga dengan adanya kesempatan ini penulis mengucapkan banyak terimakasi kepada :
1. Bapak DR. Ir. Eddy Soeryanto Soegoto, M.Si selaku rektor Universitas Komputer Indonesia
2. Bapak Wendi Zarman, M.Si selaku ketua jurusan teknik komputer Universitas Komputer Indonesia.
3. Bapak Agus Mulyana, S. Kom, M. T Sebagai pembimbing tugas akhir sekaligus pembimbing kedua di divisi roket UNIKOM yang telah memberikan banyak saran, arahan, solusi serta semangat yang tidak pernah putus kepada penulis.
5. Bapak Dr. Yeffri Handoko selaku ketua divisi Roket UNIKOM, yang banyak memberi saran dan arahan.
6. Bapak Arya selaku pembimbing tim Arjuna yang banyak bemberikan solusi tentang pengontrolan PID.
7. Seluruh bapak ibu dosen serta stap administrasi Universitas Komputer Indonesia yang telah memberikan banyak ilmu wawasan dan pengalaman selama studi penulis.
8. Kedua orang tua, bapak dan ibu tercinta yang telah banyak berkorban dan membesarkan penulis yang setiap saat memberikan kasih sayang yang ternilai harganya, semoga Allah Swt. Memberikan kemuliaan kepada keduanya baik di dunia maupun di akhirat nanti, Amin....
9. Rekan–rekan tim AEROSE 2010 Pahreza, Anti, Ervin, Tohirun, Kurnia dan tim Arjuna S4D yang tidak dapat disebutkan seluruh namanya yang telah banyak sekali membantu dan bekerja keras untuk devisi roket
10.Semua rekan–rekan Lab ELKA Yudi, Hilman, Andri, teh Santi, kang Hendra, Sely, teh Melvin yang telah banyak membantu dan memberi dukungan, serta rekan-rekan yang tidak dapat disebutkan satu persatu oleh penulis, terimakasih banyak atas bantuannya.
Akhir kata, semoga semua pihak yang telah banyak membantu penulis mendapatkan balasan dari Allah Swt. dan sekaligus meminta maaf sebesar besarnya kepada semua pihak apabila dalam proses pembelajaran penulis sampai akhirnya menulis tugas akhir ini banyak melakukan kesalahan serta berharap semoga tugas akhir ini dapat bermanfaat bagi studi Divisi Roket UNIKOM pada masa yang akan datang maupun pihak– pihak lain yang memerlukan.
![Table III.5 Konstanta pengali untuk mencari nilai suhu [9]](https://thumb-ap.123doks.com/thumbv2/123dok/649072.79092/11.595.190.436.401.540/table-iii-konstanta-pengali-untuk-mencari-nilai-suhu.webp)

![Tabel II. 4. Diskripsi pin BS2P40 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/649072.79092/24.595.120.508.585.744/tabel-ii-diskripsi-pin-bs-p.webp)
