ANALISA TORSI, LENTUR, LENDUTAN DAN LINTANG
PADA TAMPANG I
TUGAS AKHIR
Diajukan untuk Melengkapi tugas-tugas dan Memenuhi Syarat untuk
Menempuh Ujian Sidang Sarjana Teknik Sipil
Disusun oleh
DAPOT H MALAU
03 0303 060
SUB JURUSAN STRUKTUR
JURUSAN TEKNIK SIPIL
FAKULTAS TEKNIK
KATA PENGANTAR
Puji syukur penulis ucapkan atas kehadirat Tuhan Yang Maha Esa yang telah
memberikan rahmat dan hidayat-Nya hingga selesainya tugas akhir ini dengan judul
“ANALISA TORSI, LENTUR, LENDUTAN DAN LINTANG PADA PROFIL I”
Tugas akhir ini disusun untuk diajukan sebagai syarat dalam ujian sarjana
teknik sipil bidang studi struktur pada Fakultas Teknik Universitas Sumatera Utara
Medan. Penulis menyadari bahwa isi dari tugas akhir ini masih banyak kekurangannya
dan jauh dari kata sempurna. Hal ini penulis akui karena keterbatasan pengetahuan dan
kurangnya pemahaman penulis. Untuk penyempurnaannya, saran dan kritik dari bapak
dan ibu dosen serta rekan mahasiswa sangatlah penulis harapkan.
Penulis juga menyadari bahwa tanpa bimbingan, bantuan dan dorongan dari
berbagai pihak, tugas akhir ini tidak mungkin dapat diselesaikan dengan baik. Oleh
karena iu pada kesempatan ini penulis menyampaikan rasa terimakasih yang
sebesar-besarnya kepada kedua orang tua yang senantiasa penulis muliakan yang dalam
keadaan sulit telah mau memperjuangkan hingga penulis dapat menyelesaikan
perkuliahan dan sampai saat ini.
Penulis juga tidak lupa mengucapkan terima kasih kepada :
1. Bapak Prof.Dr. Ing. Johannes Tarigan, IPU selaku ketua jurusan departemen teknik
sipil Universitas Sumatera Utara.
2. Bapak Ir. Terunajaya M.Sc. selaku wakil ketua jurusan departemen teknik sipil
Universitas Sumatera Utara.
3. Bapak Prof.Dr. Ing. Johannes Tarigan, dan Bapak Ir. Sanci Barus M.T, selaku
tenaga dan pikiran untuk memberikan bimbingan dalam menyelesaikan tugas akhir
ini.
4. Bapak Ir. Syahrizal M.T, selaku dosen wali sekaligus dosen pengajar selama
menempuh studi.
5. Bapak/ Ibu dosen pengajar departemen teknik sipil Universitas Sumatera Utara.
6. Seluruh pegawai administrasi yang telah memberikan bantuan dalam kemudahan
penyelesaian administrasi.
7. Rekan-rekan mahasiswa departemen teknik sipil Universitas Sumatera Utara
khususnya buat Himsar, Ronald, Tony, Masana, Ganda, Marshal dan lain lain yang
telah membantu penulis didalam mencari bahan untuk menyelesaikan tugas akhir
ini.
Sekali lagi penulis memohon maaf yang sebesar-besarnya apabila terdapat
kesalahan penulisan dan penyusunan tugas akhir ini. Akhir kata penulis berharap tugas
akhir ini berguna bagi semua pihak yang memerlukan.
Medan, Februari 2009
Tugas akhir ini aku persembahkan kepada
Ayah dan Ibu
Sebagai tanda hormat dan terima kasih
Atas segala kasih sayang dan doa
ABSTRAK
Pada bangunan teknik sipil banyak dijumpai struktur balok bersilang/grid. Struktur Grid adalah struktur yang elemen batangnya hanya menerima gaya dalam lentur satu arah (dengan arah vektor, momen lentur searah bidang grid), lintang dan torsi. Keadaan istimewa pada struktur grid adalah beban yang bekerja mengarah tegaklurus bidang grid, deformasi aksial pada elemen grid diabaikan dan tidak terjadi twisting (putaran) dengan arah vektor yang tegak bidang grid. Struktur grid biasanya ditemui pada struktur jembatan, rangka pelat lantai dan sejenisnya. biasanya struktur balok bersilang ini dikombinasikan dengan pelat beton sehingga merupakan satu kesatuan struktur.
Pada struktur balok bersilang/grid tersebut dapat terjadi gaya torsi sebagai akibat dari gaya luar yang bekerja di samping juga gaya lentur dan gaya geser, Gaya torsi tersebut dapat menimbulkan tegangan torsi dan tegangan warping, Tegangan torsi pada balok bersilang dapat terjadi di badan profil dan pada sayap atau flens profil sedangkan untuk tegangan warping terjadi pada flens akibat dari flens yang melintir ke arah lateralnya. Tegangan-tegangan yang terjadi ini harus diperhitungkan karena dapat mengakibatkan kelebihan tegangan (overstress) pada struktur apabila dikombinasikan antara tegangan yang satu dengan yang lainnya sehingga dapat melampaui tegangan baja yang diijinkan.
Dari hasil perhitungan balok bersilang maka dapat dilihat akibat beban terpusat maka akan timbul momen torsi dimana momen torsi pada batang utama (main girder) merupakan momen lentur pada batang pengaku (stiffner), harga momen torsi maksimum yang terjadi sekitar 0.1%-0.2 % dari momen lentur maksimum. Akibat momen torsi maka akan timbul tegangan torsi pada badan dan flens serta tegangan warping akibat flens melentur ke arah lateral, tegangan warping dikombinasikan dengan tegangan lentur dan geser akibat lentur murni. Pertambahan tegangan akibat torsi dibandingkan akibat lentur murni untuk tegangan geser pada badan profil sekitar 20% sedangkan pada flens sekitar 50-100%, tegangan geser pada flens akibat warping < 1% sedangkan tegangan lentur akibat warping sekitar 5-10 %,
DAFTAR ISI
KATA PENGANTAR ...i
ABSTRAK ...iv
DAFTAR ISI...vi
DAFTAR NOTASI ...ix
BAB I. PENDAHULUAN ...11
1.1. Latar belakang ...11
1.2. Permasalahan ...12
1.3. Tujuan ...13
1.4. Pembatasan Masalah ...13
1.5. Metodologi... ...14
BAB II. TEORI DASAR ...15
2.1 Jenis-jenis Struktur pada Bangunan Teknik Sipil ... 15
2.1.1 Truss (rangka) ... 15
2.1.2. Grid (Balok Silang) ... 15
2.1.3. Frame (Portal) ... 16
2.2 Jenis-jenis balok bersilang ... 16
2.3 Struktur pada balok bersilang ... 17
2.4 Gaya-gaya pada balok bersilang ... 17
2.5 Bidang Torsi ... 18
2.5.1 Perletakan Torsi ... 18
2.5.2 Penggambaran bidang Torsi ... 19
2.6 Momen Primer dan Sekunder Akibat Torsi Pada Tampang I ... 21
2.6.2 Torsi pada tampang I ... 21
2.7 Gaya torsi pada penampang I pada balok bersilang ... 22
2.8 Torsi Murni ... 23
2.9 Torsi terpilin ... 23
2.10 Tegangan geser akibat torsi ... 32
2.10.1 Akibat torsi murni ... 32
2.10.2 Akibat warping ... 33
BAB III. METODE ANALISA ... 35
3.1.Dasar-dasar Metode Elemen Hingga... 35
3.2 Metode Element Hingga berdasarkan usaha Virtual ... 36
3.3 Fungsi dan Bentuk dan Peralihan Umum ... 43
3.4. Struktur Balok (Beam Element) ... 51
3.4.1 Fungsi bentuk dan koefisien kekakuan ... 51
3.4.2 Matriks kekakuan elemen ... 54
3.5 Rangka batang bidang (Plane truss) ... 56
3.5.1 Matriks kekakuan pada koordinat lokal ... 56
3.5.2 Matriks kekakuan elemen pada koordinat global ... 60
3.6 Portal Bidang (Plane Frame) ... 62
3.6.1 Matriks kekakuan elemen portal (frame) ... 63
3.6.2 Matriks kekakuan elemen ... 66
3.6.3 Transformasi koordinat ... 69
3.7 Struktur Grid (Grid Element) ... 72
3.7.1 Pengaruh torsi ... 72
3.7.3 Transformasi koordinat ... 75
3.8 Kompatibilitas, Keseimbangan, Penentuan Dari Matriks Kekakuan... 78
3.9 Syarat keseimbangan ... 82
3.10 Beban Nodal Ekuivalen ... 83
BAB V. APLIKASI... 86
4.1 Contoh balok silang/grid ... 86
4.2 Beban yang dipikul oleh bekerja/dipikul grid baja ... 86
4.3 Perhitungan ... 87
BAB V. KESIMPULAN DAN SARAN ... 120
5.1. Kesimpulan... ... 120
5.2. Saran... ... 121
DAFTAR NOTASI
E = Modulus elastis bahan (Modulus Young)
G = Modulus geser bahan
µ = Poisson ratio
x,y,z = Koordinat kartesian
σ = Tegangan
τ = Tegangan geser
M = Momen lentur
Mz = Momen torsi total Ms = Momen torsi murni
W
M = Momen torsi akibat warping
J = Konstanta torsi
w
C = Konstanta torsi terpilin
s
τ = Tegangan geser akibat torsi murni
P = Beban terpusat
L = Panjang bentang
{u} = Matriks perpindahan
[T] = Matriks Transformasi
[B] = Matriks regangan-perpindahan
[K] = Matriks kekakuan
= Lendutan
BAB
I PENDAHULUAN1.1Latar Belakang.
Suatu balok dibebani akan timbul resultante tegangan yang secara umu tediri dari
tiga gaya dan tiga kopel. Gaya gaya tersebut adalah gaya aksial Nx,gaya geser Dy, Dz
dan kopelnya adalah momen punter Mx dan momen lentur My dan Mz..Deformasi
batang dapat dianalisa dengan meninjau masing-masing resultante tegangan secara
terpisah dan menentukan pengaruhnya pada elemen batang.
Saat ini sangat dibutuhkan ruangan yang relatif luas pada bangunan
bertingkat.Sehingga untuk memenuhi hal ini maka dibutuhkan balok silang untuk
menahan beban luar, dan juga terkadang untuk memperindah nilai arsitektur maka
diperlukan balok silang. Dan balok silang ini mengalami gaya gaya dalam yang akan
mengakibatkan deformasi struktur.
Untuk profil yang simetris maka tidak akan mengalami torsi jika tidak ada gaya
luar.Jadi dalam hal ini balok silang digunakan profil I yang simetris.
Balok silang adalah struktur bidang yang dibentuk oleh balok menerus yang saling
bertemu atau bersilang dimana pertemuan dari sambungan tersebut adalah
kaku.Berbeda dari portal bidang yang gaya luarnya berada dalam bidang struktur, gaya
luar pada balok silang tegak lurus bidang struktur, dan vektor momen semua kopel
berada dalam bidang balok. Arah beban seperti ini dapat mengakibatkan puntir dan
lenturan pada sejumlah batang. Penampang lintang setiap batang memiliki dua sumbu
simetri, sehingga lenturan dan puntir tidak saling bergantungan.
Gbr 1.1 Balok silang yang mengalami beban terpusat
Bila suatu struktur diberi beban , batangnya akan mengalami deformasi (perubahan
bentuk yang kecil)sehingga titik titik pda struktur akan berpindah keposisi yang
baru.Umumnya semua titik kecuali tumpuan yang tidak dapat bergerak akan
mengalami perpindahan. Deformasi tersebut menimbulkan respons gaya dalam.
1.2Permasalahan
Pada struktur balok bersilang/grid dapat terjadi gaya torsi sebagai akibat dari
gaya luar P yang bekerja, juga gaya lentur dan gaya geser.Gaya torsi tersebut dapat
menimbulkan tegangan torsi dan warping.Tegangan torsi pada balok bersilang I
dapat terjadi dibadan profil dan pada sayap atau flens profil, sedangkan untuk
lateralnya.Tegangan-tegangan yang terjadi ini harus diperhitungkan karena dapat mengakibatkan
kelebihan tegangan (over stress) pada struktur apabila dikombinasikan antara ysng
satu dan yang lainnya sehingga dapat melampaui tegangan baja yang diijinkan.
Gbr 1.2 Profil I yang mengalami torsi
1.3.Tujuan
Adapun tujuan penulisan dari tugas akhir ini adalah untuk mengetaui tegangan
torsi dan tegangan warping pada flens dan badan pada balok bersilang dengan
menggunakan profil I sebagai akibat dari gaya dalam.
1.4 Pembatasan Masalah
Yang menjadi batasan masalah adalah :
1. Perletakan yang dipakai adalah jepit-jepit
2. Profil yang digunakan adalah satu jenis
3. Menentukan lendutan maksimum pada grid
4. Menentukan besar gaya gaya dalam pada balok bersilang
6. Menentukan tegangan torsi
7. menentukan tegangan warping
8. Contoh perhitungan dilakukan terhadap balok bersilang
1.1.Metodologi
Metode yang digunakan dalam penulisan tugas akhir ini adalah literatur yaitu
dengan mengumpulkan data-data dan keterangan dari buku-buku yang berhubungan
dengan pembahasan pada tugas akhir ini serta masukan-masukan dari dosen
pembimbing. Untuk perhitungan dilakukan dengan metode elemen hingga,dengan
BAB II
TEORI DASAR
2.1 Jenis-jenis Struktur pada Bangunan Teknik Sipil 2.1.1 Truss (rangka)
Definisi truss (rangka) adalah konstruksi yang tersusun dari batang-batang tarik
dan batang-batang tekan saja, umumnya dari baja, kayu, atau paduan ringan guna
mendukung atap atau jembatan, umumnya dapat menahan gaya aksial saja.
Truss 2 dimensi adalah truss yang dapat menahan beban pada arah datar saja
(sumbu x, y) umumnya beban yang bekerja adalah beban terpusat nodal.
Truss 3 dimensi adalah truss yang dapat menahan beban pada semua arah
(sumbu x, y dan z) umumnya beban yang bekerja adalah beban terpusat nodal.
2.1.2. Grid (Balok Silang)
Definisi grid (balok silang) adalah kerangka yang terdiri dari dua atau lebih
bagian konstruksi yang disambungkan secara kaku (guna stabilitas) pada arah
mendatar, umumnya dapat menahan gaya yang bekerja tegak lurus (sumbu y) terhadap
bidang datarnya (sumbu x), struktur seperti sistem lantai, sistem atap dan lantai
2.1.3. Frame (Portal)
Definisi frame (portal) adalah kerangka yang terdiri dari dua atau lebih bagian
konstruksi yang disambungkan guna stabilitas, umumnya dapat menahan gaya momen,
gaya geser dan aksial.
Frame 2 dimensi adalah frame yang dapat menahan beban pada arah datar saja
(sumbu x, y) umumnya beban yang bekerja adalah beban terpusat nodal dan beban
batang. Frame 3 dimensi adalah frame yang dapat menahan beban pada semua arah
(sumbu x, y dan z) umumnya beban yang bekerja adalah beban terpusat nodal dan
beban batang.
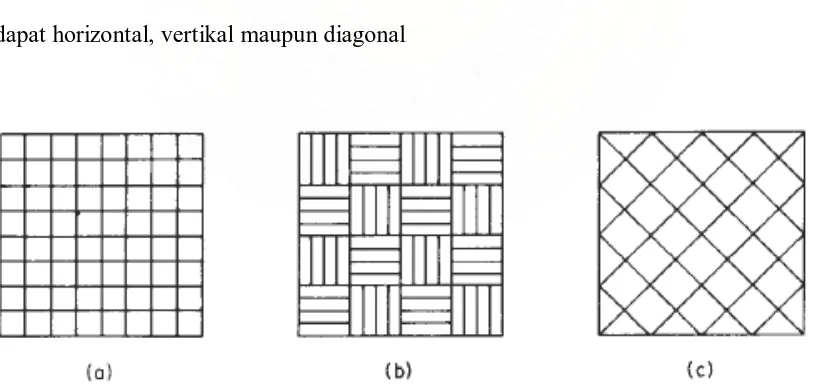
2.2 Jenis-jenis balok bersilang
Balok bersilang/grid banyak terdapat pada struktur bangunan sipil seperti pada
bangunan gedung, rangka atap, pelat lantai, jembatan dan lain-lain Beberapa jenis atau
pola pada balok bersilang dapat dilihat pada gambar 2.1 dimana arah balok bersilang
dapat horizontal, vertikal maupun diagonal
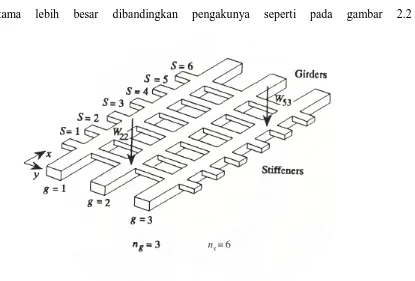
2.3 Struktur pada balok bersilang
Pada balok bersilang strukturnya terdiri dari 2 bagian dimana terdapat balok
utama (main girder) dan pengaku (stiffner), biasanya penampang pada balok bersilang
dapat mempunyai ukuran yang sama ataupun berbeda dalam hal ini ukuran balok
utama lebih besar dibandingkan pengakunya seperti pada gambar 2.2
Gambar 2.2 Struktur balok bersilang
2.4 Gaya-gaya pada balok bersilang
Pada balok bersilang karena bebannya pada arah sumbu z maka gaya-gaya yang terjadi
adalah momen akibat lentur murni, gaya geser serta torsi . Untuk momen dan geser
2.5 Bidang Torsi 2.5.1 Perletakan Torsi
Pada jenis perletakan tanpa torsi dikenal dengan sendi, jepit dan rol (lihat gambar
2.3). Khusus pada torsi maka diadakan simbol perletakan seperti pada gambar 2.3. d.
Y
X
x = 0
y = 0
Y
X
x = 0
y = 0
= 0
a. sendi b. jepit
Y
X
Y
X
y = 0 v = 0
c. rol d. sudut puntir
pada perletakan = 0
x = 0
y = 0
v = 0 Y
X Z
y = 0
v = 0 Y
X Z
x = 0 y = 0
= 0 v = 0 Y
X Z
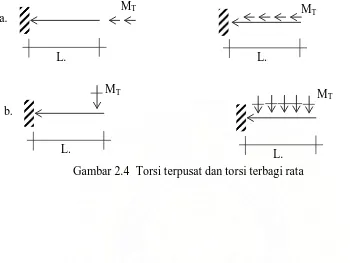
2.5.2 Penggambaran bidang Torsi
Momen torsi dapat dibuat dengan simbol seperti pada gambar 2.4 (a), tetapi dapat juga
dibuat analog dengan gambar 2.4 b (seperti gaya terpusat atau beban terbagi rata).
Dalam penggambaran bidang torsi dapat dilakukan seperti penggambaran gaya lintang
seperti pada gambar 2.5.
a.
MT
L.
MT
L.
b.
MT
L.
MT
L. Gambar 2.4 Torsi terpusat dan torsi terbagi rata
a
MT
A B
MT (-) MT
QA = MT
QB = MT
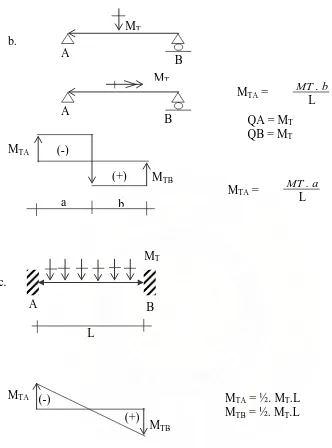
Gambar 2.5. Gambar bidang Torsi
Penggambaran tanda bidang momen sama seperti menutup dan membuka skrup. Kalau
arah Momen Torsi kearah menutup maka digambarkan negatif dan kalau kearah
membuka maka digambar positif. MT
A B
c.
L
(-)
(+) MTA
MTB
MTA = ½. MT.L
MTB = ½. MT.L
MT
A
B b.
QA = MT
QB = MT
MTA = MT . b
L
MTA
MTB
(-)
(+)
a b
MTA = MT . a
L MT
A
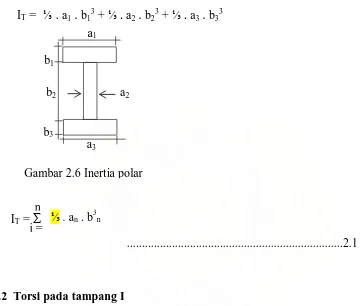
2.6 Momen Primer dan Sekunder Akibat Torsi Pada Tampang I 2.6.1 Inertia Polar pada tampang I
Inertia polar pada tampang I adalah seperti pada gambar 2.9, inersia torsi didapat
dihitung :
...2.1
2.6.2 Torsi pada tampang I
Jika suatu konstruksi dengan profil dibebani dengan MT seperti pada gambar 2.7a,
maka bidang torsinya adalah paa gambar 2.7.b, IT =
n
i = . an . b
3 n
A B C
a. GIT
2 MT
(-)
(+)
b. MT
MT
L/2 L/2
Gambar 2.7. Bidang torsi
.
a1.
b13 +.
a2.
b23 +.
a3.
b33IT =
a1
a2
a3
b1
b2
b3
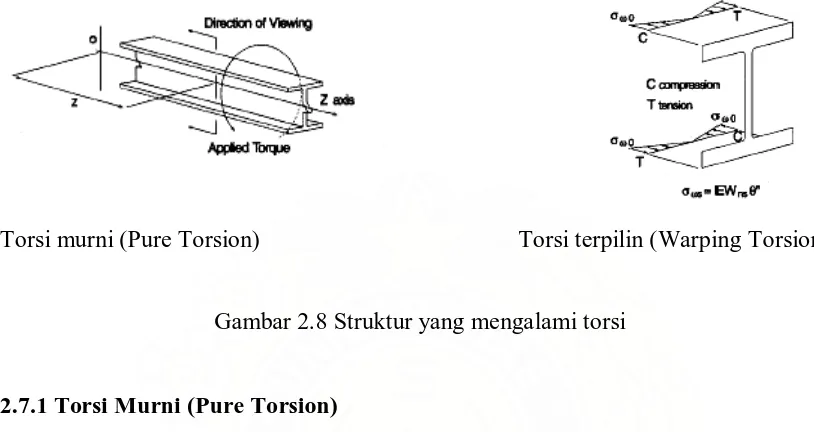
2.7.Gaya torsi pada penampang I pada balok bersilang
Gaya torsi pada penampang I terdiri dari dua jenis :
Torsi murni (Pure Torsion) Torsi terpilin (Warping Torsion)
Gambar 2.8 Struktur yang mengalami torsi
2.7.1 Torsi Murni (Pure Torsion)
Terjadi jika penampang melintang yang rata tetap menjadi rata setelah torsi bekerja
dan penampang hanya mengalami rotasi selama torsi bekerja.dengan kata lain torsi
murni hanya mengakibatkan perputaran profil karena tidak adanya penahan profil
Misalkan pada balok memikul torsi murni sebesar Ms maka besarnya torsi tersebut
adalah
dz d GJ
Ms= φ ...(2.2) dimana Ms = momen torsi murni
G = modulus geser =
) 1 (
2 +µ
E
dimana J = konstanta torsi
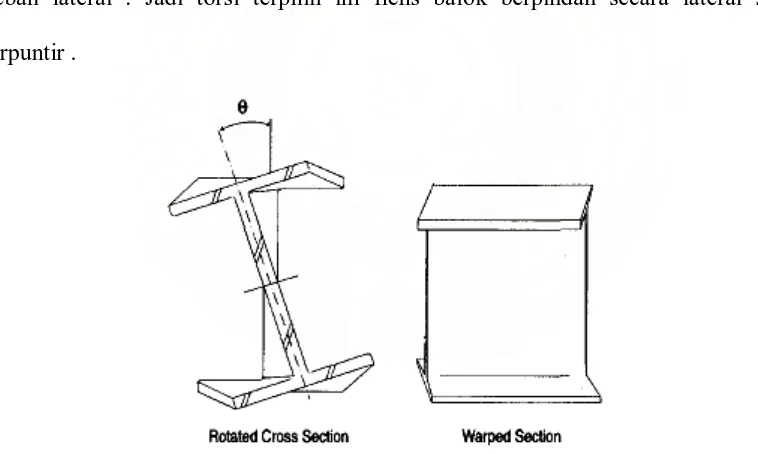
2.7.2 Torsi terpilin (Warping Torsion)
Keadaanya sama dengan balok yang mengalami lentur ke luar bidang gambar akibat
beban lateral . Jadi torsi terpilin ini flens balok berpindah secara lateral selama
terpuntir .
Jika balok memikul torsi terpilin, maka flens tekan balok akan melengkung ke salah
satu arah lateral dan flens tariknya akan melengkung ke arah lateral lainnya
Penampang balok menjadi tidak rata lagi, flens akan melendut sebesar uf , lendutan ini menimbulkan tegangan lentur dan geser pada flens tersebut.
Torsi terpilin/warping terdiri atas 2 bagian yaitu :
1. Torsi murni (Pure Torsion), menyebabkan rotasi elemen (=φ).
2. Translasi yang menyebabkan balok melentur secara lateral (akibat warping).
Penurunan persamaan diferensial untuk torsi penampang I
Vf = gaya geser yang bekerja pada flens akibat balok melendut secara lateral, pada saat balok melendut lateral badan balok tetap datar.
untuk φ sangat kecil maka tanφ ≈φ
φ =
2 h Uf
maka
2
h
Uf =φ ...(2.3)
dz d h dz
dUf φ
2
= ...(2.4)
2 2
2 2
2 dz d h dz
U
d f φ
= ...(2.5)
3 3
3 3
2 dz d h dz
U
d f φ
= ...(2.6)
Dari mekanika teknik diketahui
f f f
EI M
dz U d
− =
2 2
...(2.7)
f
f
M = Momen lentur lateral pada flens
Gaya lintang f f f EIf
dz U d
dz dM
V 3
3
− =
= ...(2.8)
atau
f f f
EI V dz
U d
− =
3 3
dimana 3
3
3 3
2 dz d h dz
U
d f φ
= . ...(2.9)
atau )
2
( 3
3
dz d h EI
Vf =− f φ . ...(2.10)
Kita mengetahui bahwa komponen momen torsi M yang menimbulkan lenturan w
pada flens = Vf.h
= 3
3 2
2 dz d h
EIf φ
− ...(2.11)
dengan
2 .h2 I
Cw = f C = konstanta torsi terpilin (warping coefficient) w
Momen torsi total = momen torsi akibat rotasi (MS)+ momen toris akibat lentur
lateral (MW)
W S
Z M M
M = + ...(2.12)
3 3
dz d EC dz d GJ
MZ = φ − W φ ...(2.13)
Persamaan diferensial dari akan dicari penyelesaiannya, ruas kiri dan kanan dibagi
dengan E.CW maka
dz d C E
GJ dz
d C E
M
W W
Z φ φ
.
. 3
3
− =
misalkan 2
.CW =λ
E GJ sehingga W Z C E M dz d dz d . 2 3 3 − = −λ φ
φ ...(2.15)
Persamaan diferensial tersebut adalah homogen maka ada 2 jawaban yaitu jawaban
umum PD homogen dan jawaban khusus PD non homogen
Jawaban PD homogen 3 2 0
3 = − dz d dz d φ λ
φ ...(2.16)
Misalkan φ = A.emz
mz e m A dz d . . =
φ .. ...(2.17)
mz e m A dz d . . 2 2 2 =
φ . ...(2.18)
mz e m A dz d . . 3 3 3 =
φ ...(2.19)
0 .
. .
.m3emz − 2Amemz =
A λ ...(2.20) 0
) (m2 −λ2 =
m m1 =0
m2 =0 dan m3 =−λ
Jadi A1.e A2.e A3
Z Z
+ +
= λ −λ
φ . ...(2.21)
Dalam fungsi hiperbolikus dapat ditulis :
C z B
z
A + +
= λ λ
φ1 .sinh .cosh ...(2.22)
Jawaban khusus dari
W Z
C E
M dz
d dz
d
.
2 3 3
− = −λ φ
φ ...(2.23)
) (
1
2 = f z
φ dan MZ = f(z)
) ( .
1 )
( )
( 2 1
3 1 3
z f C E dz
z df dz
z f d
W − =
−λ ...(2.24)
diperoleh f1(z)
Maka jawaban total φ =φ1+φ2 dengan φ = sudut torsi
Sekarang kita tinjau balok 2 perletakan dengan profil I dimana ujung-ujung berupa
sendi. Momen torsi bekerja di tengah bentang, maka akan ditentukan persamaan untuk
sudut torsi φ dan besar tegangan geser akibat torsi murni dan warping serta tegangan
normal yang terjadi akibat lendutan arah lateral, di sini langkah –langkahnya adalah
sebagai berikut : Distribusi momen torsi total MZ =MS +MWyang menyebabkan
geser pada flens. Distribusi momen torsi M akibat torsi murni Z
dz d GJ MS = φ.
Distribusi momen torsi 3
3
. dz d C E
MW =− W φ
Karena M bernilai konstan maka Z φ dapat berbentuk A+B.z
A adalah jawaban umum persamaan diferensial homogen sedangkan B jawaban khusus
persamaan diferensial homogen
Kembali ke persamaan diferensialnya
w Z
w EC
M dz
d EC
GJ dz
d
.
3 3
− =
− φ
φ ...(2.25)
Bz A+
=
B dz d = φ 0 2 2 = dz d φ Maka w w EC T EC GJ
B /2
0− =− . ...(2.26)
GJ T B
2
=
Jadi jawaban umum PD homogen adalah
z GJ T C z B z A 2 . cosh .
sinh + + +
= λ λ
φ ...(2.27)
Syarat batas
1 φ =0 pada z=0 dan z=L
0
=
φ
0
=
z maka 0=B+C. ...(2.28)
2. 2 0
2
=
dz
d φ
pada z=0 dan z=L
GJ T z B z A dz d 2 . sinh . . . cosh . . + +− =λ λ λ λ φ z B z A dz d cosh . . sinh . . 2 2 2 2 λ λ λ φ =− + B + =0
0 diperoleh B =0 . ...(2.29)
Harga 2.29 disubstitusikan ke 2.28 diperoleh C= 0
0
=
dz dφ
pada z=L/2 ...(2.30)
GJ T L A
2 2 cosh
0= λ +
)
2 cosh
1 (
2GJ L
T A
λ λ
−
= ...(2.31)
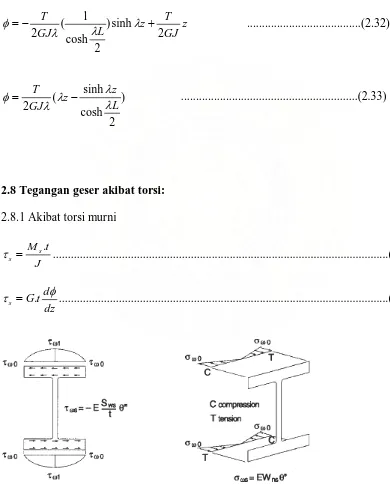
Dari harga A, B dan C diperoleh persamaan untuk jawaban total
z GJ T z L
GJ T
2 sinh )
2 cosh
1 (
2 +
−
= λ λ λ
φ ...(2.32)
)
2 cosh
sinh (
2 L
z z
GJ T
λ λ λ
λ
φ = − ...(2.33)
2.8 Tegangan geser akibat torsi:
2.8.1 Akibat torsi murni
J t Ms
s
.
=
τ ...(2.34)
dz d t G
s
φ
τ = . ...(2.35)
2.8.2 Akibat warping
Pada gambar 2.6 penampang yang mengalami warping maka
f f f t b b t b Q . 8 4 . . 2 2 = = ...(2.36) f f f f s t I Q V . . = τ ...(2.37) f f f f w t I dz d h EI t b . / ). 2 / .( ).( . 8 /
( 2 3φ 3
τ = − ...(2.38)
3 3 2 16 dz d h b E w ϕ
τ = ...(2.39)
f f bw I E M . = σ ...(2.40) f f f I E M dz U d . 2 2 = ...(2.41) dimana 2 .h
Uf =φ
2 2 2 2 2 dz d h dz U
d f φ
= f f I E M dz d h . 2 2 2 − = φ 2 2 . dz d h C E M w
f = φ ...(2.42)
dimana
2 .h2 If
Tegangan normal maksimum terjadi pada x=b/2
) 2 ( ) 2 (
. 2
2
f f
bw
I b dz d h I
E φ
σ = ...(2.43)
2 2
4 dz
d Ebh
bw φ
BAB III
METODE ANALISA
3.1 Dasar-dasar Metode Elemen Hingga
Struktur dalam istilah teknik sipil adalah rangkaian elemen-elemen yang
sejenis maupun yang tidak sejenis. Elemen adalah susunan materi yang mempunyai
bentuk relatif teratur. Elemen ini akan mempunyai sifat-sifat tertentu yang tergantung
kepada bentuk fisik dan materi penyusunnya. Bentuk fisik dan materi penyusun elemen
tersebut akan menyebutkan totalitas element tersebut. Totalitas sifat elemen inilah
disebut dengan kekakuan elemen. Jika diperinci maka sebuah struktur mempunyai
Modulus elastis (E), Modulus geser (G), Luas penampang (A), Panjang (L) dan Inersia
(I). Hal inilah yang salah satu yang perlu dipahami didalam pemahaman elemen hingga
nantinya, bahwa kekakuan adalah fungsi dari E,G,A,L,I.
Sebagaimana telah didefinisikan para pendahulu-pendahulu, bahwa energi itu
adalah kekal dan jika aksi (energi) dilakukan terhadap suatu materi, maka materi akan
melakukan suatu reaksi sebesar aksi tersebut. Reaksi dari materi ini akan disebut
dengan gaya dalam.”GAYA DALAM “ yang ada dalam struktur didefinisikan yaitu,
Gaya Normal, Gaya Lintang, dan Gaya Momen yang akan mempengaruhi bentuk
fisik materi tersebut. Perubahan bentuk fisik materi ini disebut dengan peralihan
perjalanan aksi hingga timbul reaksi dalam materi, atau metode untuk meramal besar
reaksi dan reaksi apa yang timbul dari materi tersebut.
3.2 Metode Element Hingga berdasarkan usaha Virtual
Ambil contoh sebuah elemen tiga dimensi yang terletak pada salib sumbu
Cartesius dalam kordinat X,Y dan Z peralihan umum (generic displacement) yang
terjadi pada sembarangan titik dalam elemen dinyatakan dalam vektor kolom u :
u =
{
u ,,v w}
...(3.1)dimana u,v dan w berturut-turut merupakan translasi dalam arah x,y dan z
Bila pada elemen dikerjakan gaya tubuh (Body force), gaya-gaya ini akan
dimasukkan kedalam vektor b, seperti sebagai berikut :
b =
{
bx,by,bz}
………(3.2)Notasi b ,x by, dan b mewakili kokponen-komponen gaya (persatuan volume, z luas atau panjang) yang bekerja pada sembarangan titik sesuai dengan arah x,y dan z.
Sementara ini, peralihan titik nodal (nodal displacement) q yang
diperhitungkan hannyalah berupa translasi dalam arah x,y dan z. Bila n = jumlah en
titik nodal elemen , maka:
q =
{ }
q ( i = 1,2,3,... 1 n ) en ...(3.3) dimana :i
q =
{
qxi,qyi,qzi}
={
ui,vi,wi}
...(3.3b)Demikian pula untuk gaya titik nodal ( nodal action) p sementara ini hanya
diambil dalam arah x,ydan z saja
i
q =
{
pxi,pyi,pzi}
Hubungan antara peralihan umum dan peralihan titik nodal dinyatakan oleh
fungsi bentuk peralihan (displacement shape function) dalam tulisan ini digunakan
persamaan:
u = fq ...(3.5)
dalam hal ini notasi f adalh matriks segiempat yang menunjukan bahwa u sepenuhnya
tergantung pada q. Hubungan regangan-peralihan diperoleh dengan menurunkan
matriks peralihan umum.proses ini ditunjukkan dalam pembentukan matriks d yang
disebut diferensial linier dan dapat dibentuk dalam perkalian matriks:
= d u ...(3.6)
dalam persamaan ini operator d menyatakan hubungan antra vektor regangan dngan
vertor peralihan umum (vektor u). Dengan mensubsitusikan persamaan (3.5) kedalam
persamaan (3.6) akan diperoleh:
= b q ...(3.7)
dimana B = d f ...(3.8)
Matriks B menunjukan regangan yang terjadi pada sembarangan titik dalam elemen
akibat satu satuan peralihan tititk nodal.
Dari persamaan (2.3) dalam bab II.2 telah diperoleh hubungan
tegangan-regangan dalam bentuk sebagai berikut.
= E ...(3.9)
dimana E adalah matrik yang menghubungkan antara vektor tegangan dan regangan
. Jika persamaan (3.7) disubsitusikan kedalam persamaan (3.9) menghasilkan:
dimana perkalian matriks E B menunjukan tegangan pada sembarang titik bila terjadi
satu-satun peralihan titik nodal.
Prinsip usaha virtuil : bila ada struktur dalam keadaan setimbang,
dikerjakan suatu peralihan virtual yang kecil dalam batas-batas devormasi yang masih
dapat diterima , maka usaha virtual dari beban luar tadi sama dengan enegi regangan
virtual dari tegangan dalamnya.
Bila perinsip diatas kita terapkan pada elemen hingga, akan diperoleh:
Ue= We ...(3.11a)
dimana U adalah energi regangan virtual dari regangan dalam dan W merupakan
usaha virtual beban luar yang bekerja pada elemen. Untuk memperoleh kedua nilai
tersebut, kita asumsikan adanya peralihan virtual kecil yang dinyatakan dalm vektor
q. Jadi,
q = { qi} ( i = 1,2,3,... n ) en ...(3.11b) kemudian peralihan umum virtual akan menjadi [lihat persamaan (3.5)]
u = f q ...(3.11c) Dengn menggunakan hubungan regangan-peralihan dalam persamaan (3.7) didapat:
= B q ...(3.11d)
Maka enegi regangan virtual dalam U dapat ditulis sebagai berikut:
Ue=
∫
vT
dv .
σ
δε ...(3.11e)
selanjutnya usaha virtual dari gaya titik nodal dan gaya tubuh menjadi :
we = d qTp +
∫
vuTb dv ...(3.11f)
∫
v Tdv = d qTp +
∫
vuTb dv ...(3.11g)
kemudian persamaan (3.9) disubsitusikan kedalam persamaan (h), yaitu menggantikan
menjadi E
qT
∫
v BTE dv = d qTp + qT∫
v fTb dv ...(3.11h)selanjutnya, subsitusikan persamaan (3.7) untuk nilai serta bagilah ruas kiri dan
kanan dengan dqT sehingga persamaan (i) menjadi :
∫
∫
= +
v T
v T
dv d b f p q dv EB
B . . . . ………(3.11i)
persamaan ( j ) dapat dituliskan kembali menjadi :
K q = p - pb ...(3.12)
Dimana K =
∫
v
BTE B dv ...(3.13)
Dan pb =
∫
v
fTb dv ………..(3.14)
Matriks K dalam persamaan (3.13) adalah matriks kekakuan elemen, yaitu gaya yang
terjadi pada titik nodal akibat adanya satu-satuan peralihan titik nodal. Sedangka n titik
vektor Pb pada persamaan (3.14) menunjukan gaya nodal ekuivalen akibat bekerjanya
gaya tubuh dalam vektor b.
Tegangan dan regangan yang diturunkan diatas hanya bergantung pada
peralihan titik nodal. Bila terjadi regangan awal εo, maka regangan total dapat
dituliskan sebagai berikut :
= εo+ C ...(3.15)
dimana C adalah matriks hubungan regangan-tegangan. Dari persamaan terdahulu
C = E−1 ...(3.16)
Dengan menyelesaikan vektor tegangan pada persamaan (3.13) akan diperoleh :
= E ( -εo) ...(3.17)
bila persamaan ini digunakan untuk menggantikan s dalam persamaan (h), maka
akhirnya rumus tersebut menghasilkan:
K q = p + pb + p0 ...(3.18)
Dimana p0 =
∫
v
BTE εodv ...(3.19a)
Kita dapat menganggap vektor p0merupakan beban titik nodal ekivalen akibat
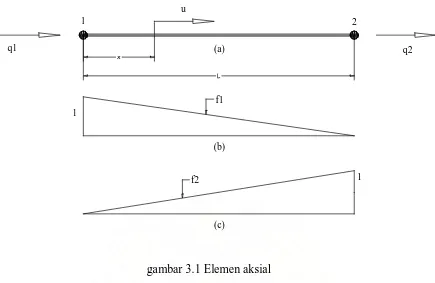
[image:37.595.129.514.232.303.2]regangan awal, sama halnya dengan yang ditimbulkan oleh perubahan temperatur.
gambar 2.2 melakiskan sebuah sebuah elemen aksial , yang kini akan diselesaikan
dengan metode elemen hingga. Dalam gambar hanya ditunjukkan hanya ada satu
peralihan umum, yaitu u dalam arah x. jadi persamaan (3.1) akan diperoleh :
u = u
Gaya tubuh yang memungkinkan adalah komponen tunggal bx
Peralihan titik nodal q1 dan q2 menunjukan translasi arah x pada nodal 1 dan 2
(gambar 2.2). Jadi persamaan (3.3) menjadi :
q = { q1,q2} = { u1,u2 }
gaya nodal yang terjadi pada titik 1 dan 2 adalah (persamaan 3.4)
p = {p1,p2} = (px1,px2}
diasumsikan peralihan u disembarangan titik pada elemen merupakan fungsi linier dari
x, seperti berikut:
q2 q1
2 1
u
1
1
(c) (b) (a)
f2 f1
[image:38.595.91.526.87.370.2]L x
gambar 3.1 Elemen aksial
persamaan ini dikenal sebagai fungsi peralihan. Persamaan ini dapat dinyatakan dalam
fungsi bentuk peralihan [ persamaan (3.5)], dengan mencari kedua konstanta, yaitu c 1
dan c . Pada x = 0 didapat 2 c = 1 q ; dan untuk x = L akan diperoleh 1 q = 2 c + 1 c L. 2
Jadi
2
c = q - 2 q /L. Bila konstanta ini disubsitusikan ke dalam persamaan (k), akan 1
diperoleh :
− −
= x
L q q q
u 2 1
1 ...( 3.19c)
sekarang persamaan ini bukan lagi merupakan merupakan fungsi dari konstanta,
melainkan fungsi dari peralihan titik nodal. Bila persamaan digabungkan dengan
persamaan (3.5),maka akan didapat :
− =
L x L
x
dimana f =
[
]
−
L x L x f
f1 2 1
kedua fungsi bentuk peralihan ini diperlihatkan dalam gambar2.2 b dan c
Hubungan regangan peralihan [persamaan 3.6, 3.7 dan 3.8] untuk elemen aksial hanya
terdiri dari turunan saja:
= εx= d u =
dx du
= q dx df
= Bq
maka B =
dx df
= 1
[
−1 1]
L ...( 3.19e)
dengan cara yang sama kita dapatkan hubungan tegangan-regangan [persamaan 3.9 dan
3.10] sebagai berikut:
= σx = E = Eεx = E Bq
jadi E = E dan E B =
[
−1 1]
[image:39.595.90.511.330.427.2]L E
...(3.19f)
kemudian kekakuan elemen dapat dihitung dari persamaan 3.13 sebagai berikut :
K =
∫
v
BTE B DV =
[ ]
−∫
∫
−
A L
dx dA L
E
. 1
. 1 1
1
0
2 ...(3.19g)
=
L EA
− −
1 1
1 1
dengan mengasumsikan luas penampang A besarnya konstan.
Gambar 2.5 (a) dan (b) melukiskan beban merata b yang bervariasi secara x
linier (beban persatuan panjang) dan didefinisikan sebagai berikut:
x
b = b + 1
(
)
L x b b2 − 1
akibat gaya tubuh ini, persamaan 3.14 akan menghasilkan beban titik nodal ekivalen
(
)
+ + =
+ −
− =
=
∫
∫
2 1
2 1 1
2 1
0 0 2
2
6 . 1
.
b b
b b L dx L
x b b b
L x L x
dx b f p
L L
x T
b ...(3.19g)
2 1
u
(a)
L
bx
Pb2 Pb1
x b1
b2
(b) dx
[image:40.595.94.546.86.454.2]bx
Gambar 3.2 Beban merata aksial
Sebaliknya, jika elemen dibebani perubahan temperatur yang serangan T , regangan
awal akibat ini besarnya :
3.3 Fungsi dan Bentuk dan Peralihan Umum
Asumsikan bahwa fungsi peralihan dinyatakan sebagai perkalian antara
matrik geometri q dengan matrik vektor dari konstanta sembarang c sebagai berikut :
U = g c ...(3.20)
Kemudian dicari operator g untuk setiap titik nodal sehingga :
dimana h = {g} ( i = 1,2,3,…n ) en ………(3.22) dan g menunjukkan matriks g yang dihitung pada titik nodal i, dengan mengasumsikan
bahwa matriks h adalah matriks bujur sangkar dan non singula, kemudian konstanta c
dapat dicari
c = h−1q ...(3.23a) subsitusikan persamaan 4.3 kedalam persamaan 4.1, sehingga diperoleh :
u = g c = h−1q ...(3.23b )
jika persamaan ( b ) ini dibandingkan dengan persamaan (3.5), dapat dilihat bahwa
fungsi bentuk yang diinginkan adalah :
f = g h−1 ... (3.24a) untuk elemen aksial, pertama kali dipasang fungsi peralihan asumsi [ persamaan (k)
dari bab II.3 ] kedalam persamaan (4.1)
jadi
u =
[ ]
2 1
1 c c
x ... ( 3.24b)
diperoleh
g =
[ ]
1 x ... (3.24c)perkatikan, matriks h terdiri dari dua bahagian yang dipisahkan oleh garis pembagi
seperti pada persamaan dibawah ini:
h =
2 1
1 0 1
g g
L ...(3.24d)
invers dari h adalah:
h−1=
−
L x L x
kemudian dari persamaan terdahulu kita peroleh :
f = g h−1=
[
1−x L x L]
... ( 3.24f) dengan koefisien sembarang c , 1 c , 2 c , ... 3 c , dengan fungsi peralihan asumsi tadi ndapat dianggap sebagai peralihan umum ( generalized displacement ), kemudian dapat
pula diturunkan hubungan antara peralihan titik nodal, gaya ( aksi ), kekakuan, dengan
besaran-besaran “umum“-nya. Akhirnya, persamaan dapat dituliskan tanpa tergantung
kepada gaya tubuh ataupun regangan awal :
K q = p ...(3.24g) Dengan menguraikan matriks K dalam fungsi matriks g dan h akan dihasilkan:
h−T
∫
( )
−v T
q h dv dg E q
d. ( ). . 1 = p ...(3.24h)
dimana
Bc = d g ... (3.25)
Jika kedua ruas persamaan (j) dikalikan dengan h−T serta d g dan Bc, maka diperoleh :
∫
v BTcE Bc dv h−1q = hTp ...(3.25b)persamaan ini dapat lebih disederhanakan lagi menjadi :
Kcc = pc ... ( 3.26 ) Dimana
c = h−1q
juga :
pc = hTp ... (3.27 ) dan
Kc=
∫
vBT
Gambar 2.6(a) melukiskan sebuah elemen torsi yang dapat berupa tongkat
pada mesin atau batang pada struktur grid. Elemen ini juga memiliki peralihan umum
tunggal θx, yaitu rotasi kecil dalam arah x. Jadi,
u = θx
akibat adanya peralihan elastis ini ( rotasi kecil tadi ) akan dihasilkan gaya tubuh:
b = m x
berupa momen ( persatuan panjang ) yang bekerja dalam arah x positif.
Peralihan titik nodal [lihat gambar 3.6 (a)] terdiri dari rotasi aksial yang kecil pada titik
pada nodal 1 dan 2. maka:
q =
{
q1,q2} {
+ φx1,θx2}
Gaya titik nodal yang dihasilkan pada titik 1 dan 2 adalah:
p =
{
p1,p2} {
= Mx1,Mx2}
berupa momen ( atau torsi ) dalam arah xf2 f1
q1
(c)
Pb1
q2
(b)
(a) x
L
1 2
z
[image:43.595.90.568.306.769.2]x
Karena hanya ada dua peralihan titik nodal pada elemen torsi ini, maka dapat
digunakan fungsi peralihan yang linier yaitu :
2
1 c
c
x = +
φ ... ( 3.28b)
seperti halnya pada elemen aksial, fungsi bentuk peralihan pada elemen torsi ini akan
menjadi:
f = g h−1 =
[
]
−
L x L x f
f1 2 1 ... ( 3.28c)
seperti yang diperlihatkan gambar 3.3(b) dan (c).
Kita dapat menurunkan hubungan regangan-peralihan untuk elemen torsi
dengan penampang lingkaran seperti yang terlihat pada gambar 3.4. Asumsikan bahwa
jari-jari penampang tetap lurus selama terjadi deformasi torsi. Disini dapat kita
simpulkan bahwa regangan geser akan bervariasi linier terhadap panjang jari-jari r
seperti berikut:
ω φ
γ r
dx d
r x =
= ... ( 3.28d )
dimana ω adalah putaran (twist), yaitu besarnya perubahan dari putaran sudut, jadi :
dx dθx
z y
dx
T
ymax
x
[image:45.595.92.526.94.368.2]R r
gambar 3.4 Deformasi Torsi
dari persamaan (s) dapat dibuktikan bahwa nilai maksimum regangan geser terjadi
pada permukaan. Jadi,
ω γmax =R
dimana R adalah jari-jari penampang (lihat gambar 3.4). selanjutnya, pada persamaan
(s)jelas terlihat bahwa operator diferensial d yang menghubungkan denganθx adalah
d =
dx d
r ... (3.28f) maka, matriks regangan-peralihan B akan menjadi:
B = d f =
[
−1 1]
L r
... ( 3.29g)
Yang mirip dengan matriks B pada elemen aksial, kecuali muncul nilai r.
Pada elemen torsi, hubungan antara tegangan geser ( lihat gambar 3.4)
dengan regangan gesernya dinyatakan dengan
dimana simbol G menunjukka n modulus geser material. Jadi,:
E = G dan E B = G B ... (3.29i ) Kekakuan torsi sekarang dapat diperoleh dengan menurunkan persamaan (3.13)
sebagai berikut:
K =
∫
Ε vT
BdV
B ... (3.29j)
[
]
rdrd dxL Gr L R . . . 1 1 1 1 0 2 0 0 2 2 θ π − − =
∫ ∫∫
= − − 1 1 1 1 L GJdengan GJ konstan. Momen inersia polar J didefenisikan sebagai berikut:
J =
∫∫
=π π θ 2 0 0 4 3 2 . . . R R d dr
r ... (3.29k )
Untuk penampang yang bukan lingkaran, momen inersia polar digantikan oleh
[image:46.595.198.514.560.653.2]konstanta torsi.
Gambar 2.8 menunjukkan elemen torsi dengan dua jenis penampang lingkaran; sengah
bentang yang lain mempunyai jari-jari R. Untuk memperoleh kekakuan struktur ini,
kita dapat menggunakan persamaan (3.13), hasilnya:
K = x
L R L
L R d dx dr r dx dr r L G θ π
∫ ∫ ∫
∫ ∫
+ − − 2 0 2 0 20 2 0
3 3
2 . . .
1 1 1 1 = − 1 1 1 1 2 17 L GJ
... (3.30)
jika persamaan (3.30) dibandingkan dengan (3.31); disini terlihat bahwa perbedaan
beban titik nodal ekivalen akibat torsi terpusat M yang berjarak x = L/G dari titik x
nodal 1 [gambar 3.8(a)] menjadi:
( )
=
− =
= =
1 5
6 6
1 6 1 1
6
x x
L x T x x
M M
f M
P ... (3.31 )
untuk masalah tersebut hasilnya dapat diperoleh dengan menghitung besarnya fungsi
bentuk peralihan pada titik sejauh x = L/G . perhitungan ini sama sekali tidak
membutuhkan proses integrasi [pada persamaan (3.13)]. Selanjutnya, hasil perhitungan
dari elemen torsi dengan penampang kombinasi ini akan sama dengan elemen biasa
(ukan kombinasi) karena kedua elemen ini menggunakan fungsi bentuk yang sama.
Gambar 2.8(b) memperlihatkan torsi aksial merata berbentuk parabolik (persatuan
panjang) yang ditentukan sebagai berikut:
2 2
2 L x m
mx = x ... (3.32 )
( b )
mx
mx2
dx x
Mx
( a )
L 2 L
2 L
5
2 1
Pb1
4R 2R Pb
2 x
[image:47.595.92.527.339.709.2]akibat pengaruh torsi ini, beban titik nodal ekivalen yang dihitung dari persamaan
(3.14) adalah :
∫
= dx
L x m f
Pb T x 2 .
2
2 ………. (3.33)
∫
− = x L
L x L x L
m
0 2
1
12
=
3 1
12
2L
mx
yang sekali lagi tidak tergantung kepada perbedaan luas penampang.
3.4. Struktur Balok (Beam Element)
Balok adalah struktur yang dimodelkan secara bidang datar dimana beban yang bekerja
pada arah longitudinalnya.
3.4.1 Fungsi bentuk dan koefisien kekakuan
Pada Gambar 3.6 kita mengambil satu elemen dari balok. titik koordinat pada kedua
ujung dari elemen ini ditandai dengan δ1,δ2,δ3dan δ4(perpindahan linier dan sudut).
perpindahan titik elemen δi Koordinat sistem elemen atau lokal x ,ydan zyang dikekang pada titik awal di sebelah kiri ujung
Gambar 3.6 Balok dengan koordinat titik δ1 sampai δ1 dan gaya titik P 1
Koefisisen kekakuan kij didefinisikan sebagai gaya pada titik koordinat i ketika satu satuan perpindahan diberikan pada titik koordinat j . Gambar 3.10 menunjukkan
koefisien kekakuan untuk elemen balok akibat satu satuan perpindahan pada koordinat
Gambar 3.7 Koefisien kekakuan balok akibat satu satuan perpindahan pada titik
koordinat
Perhitungan dari koefisien ki,jdan fungsi bentuk N1(x), N2(x),N3(x)dan )
(
4 x
N untuk kurva seperti yang ditunjukkan pada gambar 3.10 maka
EI x w dx
y
d ( )
4 2
= ………...………....…. (3.34)
dimana w(x)= gaya luar persatuan panjang.
E= modulus elastisitas
I = momen inersia penampang
Untuk balok seperti pada gambar 3.10 dengan tidak ada beban untuk w(x)= 0, maka persamaan menjadi
0
4 4
=
dx y d
………. ...…. (3.35)
Dengan mengintegralkan persamaan 3.35 empat kali, persamaan untuk perpindahan
pada balok pada suku dari keempat konstanta integrasi, C ,1 C ,C2 3danC 4
4 3 2 2 3
1
2 1 6
1
C x C x C x
C
y= + + + ………...…. (3.36)
Konstanta integrasi dari C sampai 1 C dihitung dari syarat batas . Untuk balok seperti 4
Pada x=0 y(0)=1 dan (0) =0
dx dy
………...……… (3.37)
Pada x=L y(L)=1 dan ( ) =0
dx L dy
…………....………. (3.38)
Dengan mensubstitusikan syarat batas pada persamaan untuk memperoleh
1
C ,C ,C2 3dan C maka hasil persamaan dari fungsi bentuk untuk balok adalah 4
3 2
1( ) 1 3 2
+ − = L x L x x
N ………...…...…. (3.39)
dimana N1(x) sebagai pengganti dari y(x)akibat kondisi δ1 =1 terhadap balok. Kita memperoleh untuk fungsi bentuk yang lain adalah
2
2( ) 1
− = L x x x
N ………...………..…. (3.40)
3 2
3( ) 3 2
− = L x L x x
N ………...………. (3.41)
− = 1 ) ( 2 4 L x L x x
N ………...………. (3.42)
Total perpindahan y(x)pada koordinat x akibat perpindahan δ1,δ2,δ3dan δ4 pada titik koordinat dari elemen balok dapat dituliskan :
4 4 3 3 2 2 1
1( ). ( ). ( ). ( ).
)
(x N x δ N x δ N x δ N x δ
y = + + + ……….…………...…. (3.43)
3.4.2 Matriks kekakuan elemen
dx x N x N EI k j i L j
i ( ) ( )
0
, =
∫
″ ″ ………..………. (3.44)dimana Ni″(x)dan Nj″(x) adalah turunan kedua dari fungsi bentuk persamaan 3.39
sampai 3.42 yang berhubungan dengan x , Eadalah modulus elastisitas dan Iadalah momen inersia penampang balok, sebagai contoh untuk menghitung k , kita 12
memasukkan persamaan 3.39 dan 3.40 ke persamaan 3.44 kita peroleh :
2 12
6
L EI
k = ………...………. (3.45)
4 14 3 13 2 12 1 11
1 k δ k δ k δ k δ
P = + + + …..………..………. (3.46)
Secara analog maka untuk koordinat lain diperoleh
4 24 3 23 2 22 1 21
2 k δ k δ k δ k δ
P = + + + …..………. (3.47)
4 34 3 33 2 32 1 31
3 k δ k δ k δ k δ
P = + + + …..………. (3.48)
4 44 3 43 2 42 1 41
4 k δ k δ k δ k δ
P = + + + …..………. (3.49)
atau dalam bentuk matiks dapat ditulis
= 44 43 42 41 43 33 32 31 42 32 22 21 14 13 12 11 4 3 2 1 k k k k k k k k k k k k k k k k P P P P
…..………... (3.50)
Dengan menggunakan persamaan 3.42 ke dalam persamaan 3.43 maka koefisien
kekakuan dapat diperoleh sebagai berikut :
− − − − − − = 4 3 2 1 2 2 2 2 3 4 3 2 1 4 6 2 6 6 12 6 12 2 6 4 6 6 12 6 12 δ δ δδ L L L L L L L L L L L L L EI P P P P
atau dalam bentuk sederhana
( )
P =[ ]
k( )
δ ………...……... (3.52)3.5 Rangka batang bidang (Plane truss)
Rangka batang bidang adalah struktur rangka batang yang dimodelkan dan dianalisis
secara bidang datar dengan beban yang bekerja terletak pada bidang datar tersebut,
Arah beban yang bekerja :
1. Beban terpusat arah vertikal yang bekerja di titik buhul.
[image:53.595.88.455.359.559.2]2. Beban terusat arah horizontal yang bekerja di titik buhul.
Gambar 3.11 Rangka batang bidang dengan perpindahan titik dan gaya
3.5.1 Matriks kekakuan pada koordinat lokal
Suatu batang truss (rangka batang) bidang mempunyai empat titik koordinat
dengan dua titik koordinat pada masing-masing titik hubungnya seperti pada Gambar
Gambar 3.8 Perpindahan penampang pada rangka batang bidang
dan perpindahan untuk titik koordinat sepanjang sumbu batang (koordinat 1 dan 3
pada gambar 3.11, tidak bergantung pada perpindahan transversal sepanjang
koordinat. Asumsi ini adalah ekivalen untuk menyatakan bahwa perpindahan
sepanjang titik koordinat 1 dan 3 tidak menghasilkan gaya sepanjang titik koordinat 2
dan 4. Seperti pada gambar 3.12 jika u=u(x) adalah perpindahan pada potongan x , perpindahan pada potongan x+dxakan menjadi u+du. Elemen dx pada posisinya
yang baru telah berubah panjangnya sebesar du dan karena itu regangan menjadi
dx du
.,
karena hukum Hooke maka rasio tegangan terhadap regangan sama dengan modulus
elastisitas E , dapat ditulis menjadi
AE P dx du
= ………...……... (3.53)
Dengan mengintegralkan persamaan terhadapx diperoleh
C x AE
P x
u( )= + ………...……... (3.54) dimana C adalah konstanta integrasi. Dengan syarat batas u =1 pada x=0 dan u =0
L x x
u1( )=1− ………...…...…... (3.55)
Secara analog maka fungsi perpindahan
L x x
u2( )= ………...…...…... (3.56)
Koefisien kekakuan akibat aksial di titik koordinat mungkin diperoleh menggunakan
persamaan dx x u x u AE k j i L j
i, =
∫
0 ′( ) ′( ) ...…...….... (3.57)Penggunaan dari persamaan ini untuk elemen menghasilkan koefisien sebagai berikut :
L AE k
k11 = 33 = dan
L AE k
k13 = 31 =− …...…... (3.58)
dimana
E= modulus elastisitas
I = momen inersia penampang
L= panjang batang
Koefisien kekakuan untuk ujung sendi elemen, akibat titik koordinat 2 dan 4 semua
sama dengan nol, karena gaya tidak menghasilkan perpindahan pada titik ini. Karena
itu dengan menyusun koefisien pada persamaan 3.56 kita memperoleh persamaan
kekakuan untuk batang truss menjadi
− − = 3 3 2 1 4 3 2 1 0 0 0 0 0 1 0 1 0 0 0 0 0 1 0 1 δ δ δδ L AE P P P P
atau dengan notasi yang sederhana
( )
P =[ ]
K( )
δ …...…... (3.60)Matriks kekakuan pada persamaan 3.57 diperoleh pada arah ke titik koordinat sesuai
dengan sumbu lokal atau sistem koordinat elemen. Transformasi perpindahan gaya dan
gaya pada titik koordinat adalah
− −
=
4 3 2 1
4 3 2 1
cos sin
0 0
sin cos
0 0
0 0
cos sin
0 0
sin cos
P P P P
P P P P
θ
θ θ
θ θ
θ θ
θ
... (3.61)
dimana θ adalah sudut antara sumbu global x dan lokal x seperti pada gambar
Persamaan dapat ditulis kembali dengan
( )
P =[ ]
T( )
P ... (3.62)dimana
( )
P dan( )
P adalah gaya titik yang sesuai dengan sumbu lokal dan sumbuglobal koordinat dan
[ ]
T adalah transformasi matriks seperti pada persamaanTransformasi matriks
[ ]
T juga membuat transformasi dari vektor perpindahan titikδ pada koordinat global sistem ke perpindahan titik
( )
δ pada koordinat lokal.( )
δ =[ ]
T( )
δ ... (3.63)Substitusi persamaan 3.62 dan persamaan 3.63 ke dalam persamaan kekakuan 3.60
akan menghasilkan
Karena
[ ]
T adalah matriks ortogonal[ ] [ ]
T −1 = T Tmaka( )
P =[ ]
T T[ ]
K[ ]
T( )
δ ... (3.65)atau
( )
P =[ ]( )
K δ ... (3.66)dimana
[ ] [ ]
K = T T[ ][ ]
K T ... (3.67) [image:57.595.93.466.289.622.2]Adalah matriks kekakuan pada sistem koordinat global
3.5.2 Matriks kekakuan elemen pada koordinat global
Substitusi kekakuan matriks
[ ]
k ke persamaan 3.57 dan matriks transformasi sertatransposenya dari persamaan 3.59 ke dalam persamaan 3.65 menghasilkan matriks
kekakuan elemen pada sistem koordinat global :
[ ]
− −
− −
− −
− − =
2 2
2 2
2 2
2 2
s cs s cs
cs c
cs c
s cs s
cs
cs c
cs c
L AE
k ... (3.68)
Pada persamaan 3.68c dan s menunjukkan cos dan θ sin θ
Gaya ujung pada elemen atau batang truss pada koordinat sumbu global ditentukan
sebagai berikut :
( )
P =[ ]
k( )
δ ... (3.69)dimana
( )
P dan( )
δ adalah vektor gaya titik dan vektor perpindahan titik dan( )
kadalah matriks kekakuan elemen atau batang. Vektor
( )
P dan( )
δ dan juga matriks( )
k adalah pada sistem sumbu global koordinatGaya ujung P pada sistem sumbu lokal kemudian dihitung dengan persamaan 3.62. Akan tetapi dapat juga menghitung gaya elemen (tekan dan tarik) dengan menentukan
Perpindahan dari elemen ini sepanjang sumbu x longitudinal dapat dituliskan sebagai
berikut :
θ δ δ θ δ
δ )cos ( )sin ( 3 − 1 + 4 − 2
=
∆ ... (3.70)
Regangannya menjadi
L
∆ =
ε dan tegangan σ =Eε =E∆/Ldan gaya aksial
L EA A
P = σ = ∆/ ... (3.71)
atau dengan menggunakan persamaan
[
(δ3 −δ1)cosθ +(δ4 −δ2)sinθ]
=L EA
P ... (3.72)
Dimana
E= modulus elastisitas
I = momen inersia penampang
L= panjang batang
θ = sudut antara sumbul global X dan sumbu lokal x
3.6 Portal Bidang (Plane Frame)
Portal bidang adalah struktur portal yang dimodelkan dan dianalisa secara bidang datar
dengan beban yang bekerja terletak pada bidang tersebut. Struktur portal bidang dapat
pula berbentuk balok menerus terletak di atas beberapa tumpuan dan sering disebut
1. Beban terpusat /terbagi rata arah vertikal (berat sendiri, beban gerak sesuai dngen
peraturan muatan).
2. Beban terpusat/terbagi rata arah horizontal (beban angin, beban gempa dengan
statis ekivalen).
3. Beban terpusat arah putaran se arah atau berlawanan arah jarum jam.
3.6.1 Matriks kekakuan elemen portal (frame)
Matriks kekakuan pada koordinat titik dari suatu elemen dari portal bidang diperoleh
dari kombinasi antar matriks kekakuan akibat pengaruh aksial dan matriks kekakuan
akibat pengaruh lentur. Hasil matriks dari kombinasi hubungan P dan perpindahan i δi
[image:60.595.102.461.360.548.2]pada koordinat titik adalah seperti pada Gambar 3.14 :
Gambar 3.10 Elemen portal bidang
Pada Gambar 3.14 kita mengambil satu elemen dari portal .dengan titik koordinat pada
kedua ujung dari elemen ini ditandai dengan δ1,δ2,δ3dan δ4(perpindahan linier dan
sudut). Pada gambar ini juga menunjukkan gaya (atau momen) P ,1 P ,2 P dan 3 P akibat 4
perpindahan titik elemen δi Koordinat sistem elemen atau lokal x ,ydan zyang
dikekang pada titik awal di sebelah kiri ujung seperti pada Gambar 3.14. Koefisisen
perpindahan diberikan pada titik koordinat j . Gambar menunjukkan koefisien
[image:61.595.86.488.140.551.2]kekakuan untuk elemen balok akibat satu satuan perpindahan pada koordinat 1
Gambar 3.11 Koefisien kekakuan portal bidang akibat satu satuan perpindahan pada
titik koordinat
Perhitungan dari koefisien ki,jdan fungsi bentuk N1(x), N2(x),N3(x)dan N4(x)
EI x w dx
y
d ( )
4 2
= ... (3.73)
dimana w(x)= gaya luar persatuan panjang.
E= modulus elastisitas
I = momen inersia penampang
Untuk balok seperti pada gambar 3.15 dengan tidak ada beban untuk w(x)= 0, persamaan menjadi :
0
4 4
=
dx y d
... (3.74)
Dengan menintegralkan persamaan empat kali, persamaan untuk perpindahan pada
balok pada suku dari keempat konstanta integrasi, C ,1 C ,C2 3dan C 4
4 3 2 2 3
1
2 1 6
1
C x