LAMPIRAN I
/*****************************************************
This program was produced by the
CodeWizardAVR V1.25.8 Standard
Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 09/07/2013
Author : F4CG
Company : F4CG
Comments:
Chip type : ATmega8
Program type : Application
Clock frequency : 16,000000 MHz
Memory model : Small
External SRAM size : 0
Data Stack size : 256
*****************************************************/
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x12 ;PORTD
#endasm
#include <lcd.h>
#include <stdio.h>
int kipas1, kipas2, kipas3, pwm, pwm1, pwm2, pwm3, sensor1, sensor2, sensor3;
int hit1, hit2, hit3, st1, st2, st3, ht1, ht2, ht3;
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Place your code here
pwm++;
if (pwm==2000)
{pwm=0;}
if(pwm<kipas1) {PORTC.3=1;}
else {PORTC.3=0;}
if(pwm<kipas2) {PORTC.4=1;}
else {PORTC.4=0;}
if(pwm<kipas3) {PORTC.5=1;}
else {PORTC.5=0;}
}
#define FIRST_ADC_INPUT 0
#define LAST_ADC_INPUT 2
unsigned int adc_data[LAST_ADC_INPUT-FIRST_ADC_INPUT+1];
#define ADC_VREF_TYPE 0x40
// ADC interrupt service routine
// with auto input scanning
interrupt [ADC_INT] void adc_isr(void)
{
register static unsigned char input_index=0;
// Read the AD conversion result
adc_data[input_index]=ADCW;
// Select next ADC input
if (++input_index > (LAST_ADC_INPUT-FIRST_ADC_INPUT))
input_index=0;
ADMUX=(FIRST_ADC_INPUT | (ADC_VREF_TYPE & 0xff))+input_index;
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
}
// Declare your global variables here
int data_adc1, data_adc2, data_adc3;
void c3tutup()
{
PORTB.5=1;
delay_ms(300);
PORTB.5=0;
delay_ms(300);
}
void c3buka()
{
PORTB.4=1;
delay_ms(300);
PORTB.4=0;
delay_ms(300);
PORTD.3=1;
}
void c2tutup()
{
PORTB.3=1;
delay_ms(300);
PORTB.3=0;
}
void c2buka()
{
PORTB.2=1;
delay_ms(300);
PORTB.2=0;
delay_ms(300);
PORTD.3=1;
}
void c1tutup()
{
PORTB.1=1;
delay_ms(300);
PORTB.1=0;
delay_ms(300);
}
void c1buka()
{
PORTB.0=1;
delay_ms(300);
PORTB.0=0;
PORTD.3=1;
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTB=0x00;
DDRB=0xFF;
// Port C initialization
// Func6=In Func5=Out Func4=Out Func3=Out Func2=In Func1=In Func0=In
// State6=T State5=0 State4=0 State3=0 State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x38;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=0 State2=T State1=T State0=T
DDRD=0x08;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: 2000,000 kHz
TCCR0=0x02;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x01;
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 125,000 kHz
// ADC Voltage Reference: AVCC pin
ADMUX=FIRST_ADC_INPUT | (ADC_VREF_TYPE & 0xff);
ADCSRA=0xCF;
// LCD module initialization
lcd_init(16);
// Global enable interrupts
#asm("sei")
lcd_gotoxy(0,0);
lcd_putsf("My Project");
lcd_gotoxy(0,1);
lcd_putsf("Sensor Asap");
delay_ms(1000);
lcd_clear();
hit1=0;
hit2=0;
st1=0;
st2=0;
st3=0;
ht1=0;
ht2=0;
ht3=0;
c1buka();
while (1)
{
// Place your code here
data_adc1=adc_data[2];
data_adc2=adc_data[0];
data_adc3=adc_data[1];
sensor1=data_adc1-200;
sensor3=data_adc2-200;
sensor2=data_adc3-200;
if(sensor1<=0){sensor1=0;}
if(sensor2<=0){sensor2=0;}
if(sensor3<=0){sensor3=0;}
sprintf(data,"%d",sensor1);
lcd_gotoxy(0,0);
sprintf(data,"%d",sensor2);
lcd_gotoxy(5,0);
lcd_puts(data);
sprintf(data,"%d",sensor3);
lcd_gotoxy(10,0);
lcd_puts(data);
if(ht1>=10 && st1==0) {c1buka(); ht1=0; st1=1;}
pwm1=sensor1*3;
if(pwm1==0){kipas1=0;}
else {if(pwm1<=800){kipas1=800;} else {kipas1=pwm1;}}
sprintf(data,"%d",kipas1);
lcd_gotoxy(0,1);
lcd_puts(data);
if(ht2>=10 && st2==0) {c2buka(); ht2=0; st2=1;}
pwm2=sensor2*3;
if(pwm2==0){kipas2=0;}
else {if(pwm2<=800){kipas2=800;} else {kipas2=pwm2;}}
sprintf(data,"%d",kipas2);
lcd_gotoxy(5,1);
lcd_puts(data);
if(ht3>=10 && st3==0) {c3buka(); ht3=0; st3=1;}
pwm3=sensor3*3;
else {if(pwm3<=800){kipas3=800;} else {kipas3=pwm3;}}
sprintf(data,"%d",kipas3);
lcd_gotoxy(10,1);
lcd_puts(data);
if(sensor1==0){hit1=hit1+1;} else{hit1=0;}
if(sensor2==0){hit2=hit2+1;} else{hit2=0;}
if(sensor3==0){hit3=hit3+1;} else{hit3=0;}
if(hit1>=10 && st1==1) {c1tutup(); hit1=0; st1=0;}
if(hit2>=10 && st2==1) {c2tutup(); hit2=0; st2=0;}
if(hit3>=10 && st3==1) {c3tutup(); hit3=0; st3=0;}
if(sensor1>=1){ht1=ht1+1;} else{ht1=0;}
if(sensor2>=1){ht2=ht2+1;} else{ht2=0;}
if(sensor3>=1){ht3=ht3+1;} else{ht3=0;}
if(sensor1==0 && sensor2==0 && sensor3==0) {PORTD.3=0;}
delay_ms(300);
lcd_clear();
};
LAMPIRAN II
Sensitive material of MQ-2 gas sensor is SnO2, which with lower conductivity in clean air. When the
target combustible gas exist, The sensor’s conductivity is more higher along with the gas concentration rising. Please use simple electrocircuit, Convert change of conductivity to correspond output signal of gas concentration.
MQ-2 gas sensor has high sensitity to LPG, Propane and Hydrogen, also could be used to Methane and other combustible steam, it is with low cost and suitable for different application.
Character Configuration
*Good sensitivity to Combustible gas in wide range * High sensitivity to LPG, Propane and Hydrogen
* Long life and low cost * Simple drive circuit
Application
* Domestic gas leakage detector * Industrial Combustible gas detector * Portable gas detector
Technical Data Basic test loop
T
The above is basic test circuit of the sensor. The sensor need to be put 2 voltage, heater voltage VH and test voltage VC . VH used to supply certified working temperature to the sensor, while VC used to detect voltage (VRL) on load resistance RL whom is in series with sensor. The sensor has light polarity, Vc need DC power. VC and VH could use same power circuit with precondition to assure
performance of sensor. In order to make the sensor with better performance,
Model No. MQ-2
Sensor Type Semiconductor Standard Encapsulation Bakelite (Black Bakelite)
Detection Gas Combustible gas and smoke
Concentration 300-10000ppm ( Combustible gas) Loop Voltage Vc ≤24V DC Heater Voltage VH 5.0V±0.2V ACorDC Circuit
Load
Resistance RL Adjustable Heater
Resistance RH 31Ω±3Ω Room Tem. Heater
consumption PH ≤900mW Sensing
Resistance Rs 2KΩ-20KΩ(in 2000ppm C3H8 ) Sensitivity S Rs(in air)/Rs(1000ppm
isobutane)≥5 Character
Slope α ≤0.6(R5000ppm/R3000ppm CH4) Tem. Humidity 20℃±2℃ 65%±5%RH
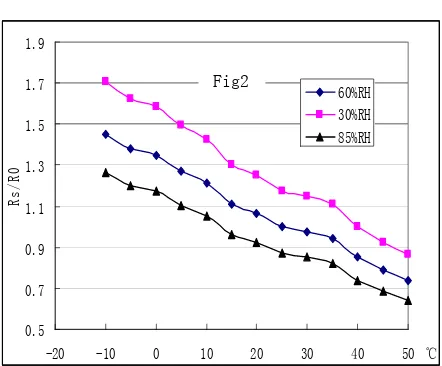
Sensitivity Characteristics Influence of Temperature/Humidity
Fig.1 shows the typical sensitivity characteristics of Fig.2 shows the typical temperature and humidity the MQ-2, ordinate means resistance ratio of the sensor characteristics. Ordinate means resistance ratio
(Rs/Ro), abscissa is concentration of gases. Rs means of the sensor (Rs/Ro), Rs means resistance of sensor resistance in different gases, Ro means resistance of in 1000ppm Butane under different tem. and humidity. sensor in 1000ppm Hyrogen. All test are under standard Ro means resistance of the sensor in environment of
test conditions. 1000ppm Methane, 20℃/65%RH
Structure and configuration
Structure and configuration of MQ-2 gas sensor is shown as Fig. 3, sensor composed by micro AL2O3 ceramic tube, Tin Dioxide (SnO2) sensitive layer, measuring electrode and heater are fixed into a crust made by plastic and stainless steel net. The heater provides necessary work conditions for work of sensitive components. The enveloped MQ-2 have 6 pin, 4 of them are used to fetch signals, and other 2 are used for providing heating current.
Fig1
0.5 0.7 0.9 1.1 1.3 1.5 1.7 1.9
-20 -10 0 10 20 30 40 50 ℃
Rs
/R0
1 Following conditions must be prohibited
1.1 Exposed to organic silicon steam
Organic silicon steam cause sensors invalid, sensors must be avoid exposing to silicon bond, fixature, silicon latex, putty or plastic contain silicon environment
1.2 High Corrosive gas
If the sensors exposed to high concentration corrosive gas (such as H2Sz, SOX,Cl2,HCl etc), it will not only result in corrosion of sensors structure, also it cause sincere sensitivity attenuation.
1.3 Alkali, Alkali metals salt, halogen pollution
The sensors performance will be changed badly if sensors be sprayed polluted by alkali metals salt especially brine, or be exposed to halogen such as fluorin.
1.4 Touch water
Sensitivity of the sensors will be reduced when spattered or dipped in water. 1.5 Freezing
Do avoid icing on sensor’surface, otherwise sensor would lose sensitivity. 1.6 Applied voltage higher
Applied voltage on sensor should not be higher than stipulated value, otherwise it cause down-line or heater damaged, and bring on sensors’ sensitivity characteristic changed badly.
1.7 Voltage on wrong pins
For 6 pins sensor, if apply voltage on 1、3 pins or 4、6 pins, it will make lead broken, and without signal when apply on 2、4 pins
2 Following conditions must be avoided
2.1 Water Condensation
Indoor conditions, slight water condensation will effect sensors performance lightly. However, if water condensation on sensors surface and keep a certain period, sensor’ sensitivity will be decreased.
2.2 Used in high gas concentration
No matter the sensor is electrified or not, if long time placed in high gas concentration, if will affect sensors characteristic.
2.3 Long time storage
The sensors resistance produce reversible drift if it’s stored for long time without electrify, this drift is related with storage conditions. Sensors should be stored in airproof without silicon gel bag with clean air. For the sensors with long time storage but no electrify, they need long aging time for stbility before using.
2.4 Long time exposed to adverse environment
No matter the sensors electrified or not, if exposed to adverse environment for long time, such as high humidity, high temperature, or high pollution etc, it will effect the sensors performance badly.
2.5 Vibration
Continual vibration will result in sensors down-lead response then repture. In transportation or assembling line, pneumatic screwdriver/ultrasonic welding machine can lead this vibration.
2.6 Concussion
If sensors meet strong concussion, it may lead its lead wire disconnected.
2.7 Usage
For sensor, handmade welding is optimal way. If use wave crest welding should meet the following conditions:
DAFTAR PUSTAKA
Andriansyah,Andi.2007. Mekatronika.Pusat Pengembangan Bahan Ajar-UMB Baharuddin.2012. Sistem Kendali Kecepatan Motor DC berbasis
PWM.Universitas Hasanuddin.
Briliant Adhi Prabowo. 2011. Pemodelan Sistem Kontrol Motor DC dengan Temperatur Udara sebagai Pemicu.LIPI : Jakarta.
Fajri Septria Agung. 2012. Sistem Deteksi Asap Rokok pada Ruangan Bebas Asap Rokok dengan Keluaran Suara.Teknik Komputer : AMIK GI MDP. Hsu,Hwei.2006.Komunikasi Analog dan Digital.Jakarta : Erlangga.
Ibna Usuman. 2010. Sistem Pendeteksi Suhu dan Asap pada Ruangan Tertutup Memanfaatkan Sensor LM 35 dan Sensor AF 30.Universitas Gajah Mada : Yogjakarta.
Manik Alif Wastharini. 2010. Perancangan dan Implementasi Sistem Telemetri Suhu Ruangan Berbasis Mikrokontroler.IT Telkom : Bandung
Oppenheim, Alan V.1988.Sinyal dan Sistem. Jakarta : Erlangga
Petruzella,Frank D.2001.Elektronik Industri.Yogjakarta : Penerbit Andi Harian Kompas .Diakses pada tanggal 11 Maret 2013
http://www.atmel.com. Diakses pada tanggal 2 Maret 2013
http://www.ari-sty.cz.cc/2010/02/pulse-width-modulation-pwm-pengenalan.html
BAB III
PERANCANGAN DAN SISTEM KERJA RANGKAIAN
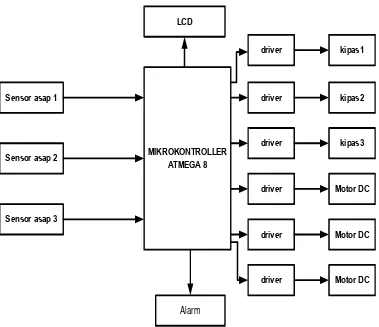
3.1 Diagram Blok
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang mempunyai fungsi masing - masing. Diagram blok dari rangkaian sistem yang dirancang adalah seperti pada gambar 3.1 dibawah ini:
MIKROKONTROLLER ATMEGA 8
driver
driver
driver Sensor asap 1
Sensor asap 2
Sensor asap 3
kipas1
kipas2
kipas3 LCD
Alarm
driver Motor DC
driver Motor DC
driver Motor DC
Desain sistem rangkaian terdiri dari:
1. Sensor asap berfungsi sebagai pendeteksi asap. Sensor yang digunakan pada penelitian ini adalah sensor MQ 2.
2. Output sensor asap dihubungkan ke port ADC pada mikrokontroller, pada penelitian ini digunakan mikrokontroller ATMEGA 8. Perubahan nilai pada sensor akan dikenali oleh mikrokontroller, selanjutnya mikrokontroller akan menampilkan nilai hasil pengukuran pada display LCD.
3. Display LCD berfungsi untuk menampilkan nilai hasil pengukuran, yaitu nilai dari kadar asap yang terdeteksi di ruangan.
4. Alarm berfungsi sebagai alat penanda adanya asap terdeteksi. 5. Kipas berfungsi sebagai output dari data yang dihasilkan pada LCD
Prinsip kerja dari rangkaian ini adalah jika di dalam ruangan terdeteksi asap rokok oleh sensor MQ 2 maka mikrokontroler akan menampilkan data sesuai dengan kadar asap pada LCD.Mikrokontroler akan mengaktifkan alarm dan mengaktifkan kipas, supaya asap yang terdeteksi bisa dikendalikan dan akan dikeluarkan melalui sebuah ventilasi.
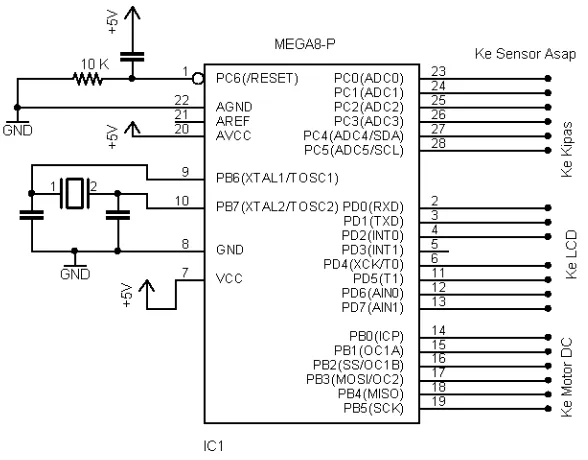
3.2 Rangkaian Mikrokontroler ATMEGA8
Gambar 3.2 Rangkaian Mikrokontroller ATMEGA8
Mikrokontroler ini memiliki 20 port I/O, yaitu port B, port C dan port D. Pin 14 sampai 19 adalah port B. Pin 23 sampai 28 adalah port C. Dan Pin 2 sampai 6 dan 11, 12 dan 13 adalah port D. Pin 7 dihubungkan ke sumber tegangan 5 volt. Dan pin 8 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
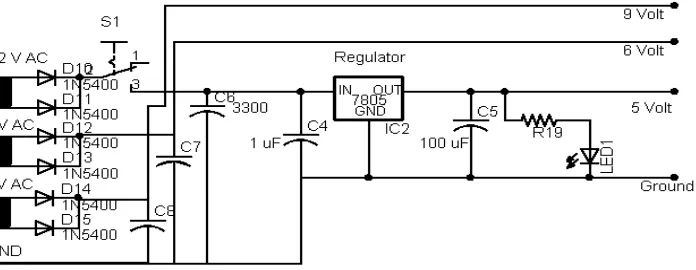
3.3 Rangkaian Power Supply
Rangkaian power supply berfungsi untuk mensuppli arus ke tegangan ke seluruh rangkaian yang digunakan. Rangkaian power supply ini terdiri dari tiga keluaran, yaitu 5 Volt, 6 Volt dan 9 Volt.Keluaran 5 Volt digunakan untuk mensuppli tegangan ke rangkaian sensor ,mikrokontroler, ddan LCD. Keluaran 6 Volt digunakan untuk mensuppli tegangan pada motor DC untuk membuka dan menutup jendela.Keluaran 9 volt untuk mengaktifkan relay.
Berikut ini adalah skema rangkaian power supply yang dibuat:
Gambar 3.3 Skematik Rangkaian Catu Daya
Transformator yang digunakan adalah transformator CT Stepdown yang akan menurunkan tegangan 220 Volt AC menjadi 12 Volt AC. Kemudian, tegangan 12 Volt AC ini disearahkan oleh 3 buah dioda 1N5400 sehingga menjadi
12 Volt DC. Kemudian tegangan ini diratakan menggunakan kapasitor 3300 μF.
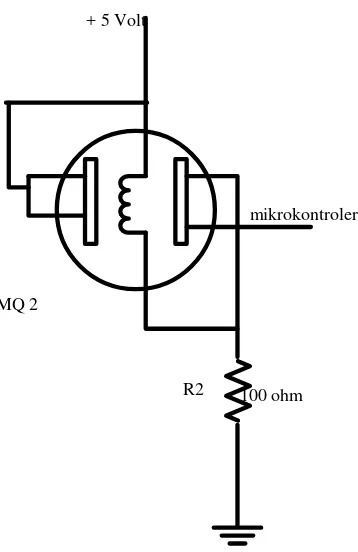
3.4 Rangkaian Sensor MQ 2
Sensor MQ 2 digunakan untuk mendeteksi kadar asap yang terdapat dalam ruangan. Sensor ini memiliki 1 keluaran, dimana tegangan keluaran akan berubah sesuai dengan perubahan kadar asap di ruangan. Rangkaian sensor ditunjukkan oleh gambar dibawah ini:
MQ 2
R2 100 ohm + 5 Volt
mikrokontroler
Gambar 3.4 Rangkaian Sensor MQ 2
Output rangkaian ini akan dihubungkan dengan mikrokontroller pada port C, yaitu ADC0,ADC1 dan ADC2. Dengan demikian saat terjadi perubahan nilai tegangan pada output sensor, maka mikrokontroller akan mengetahui nilai perubahan tersebut, dan dapat menampilkannya pada display LCD.
3.5 Rangkaian LCD (Liquid Crystal Display)
dengan mikrokontroler terdiri atas 8 saluran data ( D0 – D7 ) dan control yang terdiri atas Enable ( E,Clock) untuk memalangkan data ke buffernya , sinyal Read/Write (R/W), Register Select ( RS) : RS = 0 modus komando, RS = 1 modus data, ditambah jalur catu daya : Vss ( ground ), Vdd ( Vcc,+5 Volt), Vee ( contrast control). Pada umumnya , Vee ini dihubungkan ke pembagi tegangan ( potensiometer) antara Vcc dan ground. Karena LCD yang digunakan mempunyai backlamp, maka ditambahkan 2 pin yaitu pin-15 berfungsi untuk catu daya + 5 Volt.
Rangkaian skematik konektor yang dihubungkan dari LCD (liquid crystal display) ke mikrokontroler dapat dilihat pada gambar dibawah ini :
Gambar 3.5 Rangkaian Skematik Konektor yang dihubungkan dari LCD ke mikrokontroler
gelap/terangnya karakter yang ditampilkan pada LCD. Konektor JP3 dihubungkan ke power supply 5 Volt DC dan Ground.
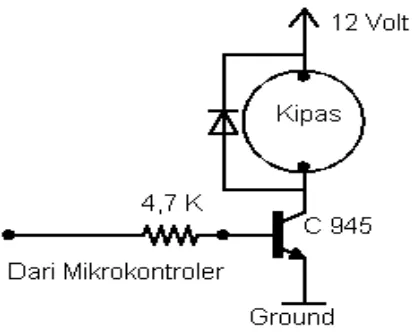
3.6 Rangkaian Driver Kipas
Rangkaian driver spreyer ini berfungsi sebagai saklar elektronik untuk menghubungkan spreyer dengan sumber tegangan positif. Pada perancangan ini digunakan kipas 12 Volt dan sebuah rangkaian transistor sebagai saklar.Pada rangkaian driver ini kipas sebagai output data yang ditampilkan pada LCD.Rangkaian driver ditunjukkan oleh gambar di bawah ini :
Gambar 3.6 Rangkaian Driver Kipas
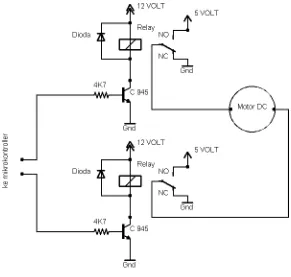
3.7 Rangkaian Relay Untuk motor DC
Rangkaian relay ini berfungsi untuk menggerakkan motor DC searah atau berlawanan arah dengan jarum jam. Rangkaian relay sebagai driver motor DC tampak seperti gambar di bawah ini ,
Gambar 3.7 Rangkaian relay
Kumparan pada relay akan menghasilkan tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut. Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
Saat relay yang terhubung ke PortB.0 pada mikrokontroler diaktifkan, maka common relay akan terhubung ke Normally Open (NO) pada relay pertama, sehingga motor mendapat tegangan positif pada satu kutupnya, sedangkan kutub yang lain terhubung ke tegangan negative, dengan demikian maka motor akan berputar ke satu arah.
Sebaliknya saat relay yang terhubung ke PortB.1 pada mikrokontroller diaktifkan, maka common relay akan terhubung ke Normally Open (NO) pada relay kedua, sehingga motor mendapat tegangan positif pada satu kutub, sedangkan kutub yang lain terhubung ke tegangan negative, dengan demikinan maka motor akan berputar ke arah yang lain. Berputarnya motor akan menyebabkan kunci terbuka atau tertutup.
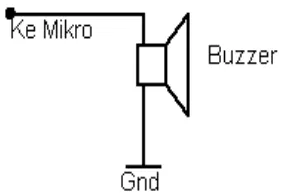
3.8 Rangkaian alarm
Rangkaian alarm sebagai alat penanda adanya asap terdeteksi dalam sebuah ruangan.
Gambar 3.8 Rangkaian alarm
3.9 Rangkaian Lengkap
3.10 Flow Chart (Diagram Alir Program)
START
Baca Sensor Asap 1
Kadar asap = 0
Ventilasi 1 tutup
Ventilasi 1 terbuka
PWM1 = sensor1*3
Hidupkan kipas 1 berdasarkan nilai
PWM
Baca sensor asap 2
Kadar asap = 0
Ventilasi 2 tutup
Ventilasi 2 terbuka
PWM2=sensor2*3
Hidupkan kipas 2 berdasarkan nilai
PWM
Baca sensor asap 3
Kadar asap = 0
Ventilasi 3 tutup
Ventilasi 2 terbuka
PWM3=sensor3*3
Hidupkan kipas 3 berdasarkan nilai
PWM
Kadar asap 1 = 0 Atau Kadar asap 2 = 0
Atau Kadar asap 3 = 0
Alarm ON Alarm OFF
Tampilkan nilai dari ketiga sensor Pada
[image:30.595.122.540.109.695.2]LCD End tidak ya tidak ya ya tidak tidak ya
Pada saat power dihidupkan mikrokontroler akan langsung membaca sensor asap.
Jika pada suatu ruangan tersebut terdapat asap rokok maka sensor tersebut akan
mendeteksi asap tersebut dan kadar asap yang terdeteksi akan ditampilkan pada
LCD. Jika kadar asap = 0 maka ventilasi akan tertutup.Dan jika kadar asap yang
terdeteksi tidak sama dengan nol maka Lebar pulsa high akan sebanding dengan
kadar asap yang terdeteksi dan kipas akan berputar berdasarkan nilai
BAB IV
HASIL DAN ANALISIS
Pada bab ini, akan dibahas pengujian alat dan analisis pengujian.
4.1 Pengujian Alat
Rangkaian pengujian alat secara keseluruhan dimuat pada lampiran 3
4.1.1 Pengujian LCD
Selain percobaan I/O port (Port A) juga dilakukan percobaan terhadap LCD. Pada tahap ini dilakukan percobaan untuk mengaktifkan LCD system. Pengaktifan LCD ini dilakukan dengan cara menampilkan beberapa karakter pada LCD.Untuk menampilkan beberapa karakter tersebut digunakan listing program sebagai berikut:
while (1)
{
// Place your code here
lcd_gotoxy(4,0);
lcd_putsf("MY PROJECT");
delay_ms(30);
lcd_clear();
};
}
Jika program di atas dijalankan maka di layar LCD akan tampil ‘MY
system dan LCD dapat berjalan dengan baik.
4.1.2 Pengujian LCD dengan MQ 2
Pengujian berikutnya, dengan cara menghubungkan MQ2 ke PORTC.0, PORTC.1 dan PORTC.2 selanjutnya membaca nilainya dan ditampilkan ke LCD. Programnya sebagai berikut:
while (1)
{
// Place your code here
lcd_gotoxy(0,0);
lcd_putsf("My Project");
lcd_gotoxy(0,1);
lcd_putsf("Sensor Asap");
delay_ms(1000);
lcd_clear();
};
}
Program di atas akan membaca nilai dari PORTC.0, PORTC.1 dan PORTC.2 yang dihubungkan ke MQ2 .kemudian akan ditampilkan ke LCD pada koordinat x=0 dan y=1 malalui perintah lcd_gotoxy(0,1); lcd_putsf("Sensor Asap");.
4.1.3 Pengujian Rangkaian Motor DC
Pengujian Motor DC dengan menghubungkan motor DC ke PORTB.0 , PORTB.1 , PORTB.2 , PORTB.3 , PORTB.4 , PORTB.5.
{
// Place your code here
PORTB.5=1;
delay_ms(300);
PORTB.5=0;
delay_ms(300); }
Berdasarkan program di atas, maka lamanya logika low (0) pada PORTB.5 adalah 300 milidetik dan lamanya logika high (1) adalah 300 milidetik. Dimana 0,3 detik untuk motor DC berputar dengan membuka ventilasi dan 0,3 detik untuk motor DC berhenti dengan menutup ventilasi .
4.1.4 Pengujian Rangkaian Kipas
Pengujian dilakukan dengan menghubungkan kipas ke PORTC.3 , PORTC.4 , PORTC.5.
// Place your code here
pwm++;
if (pwm==2000)
{pwm=0;}
if(pwm<kipas1) {PORTC.3=1;}
else{PORTC.3=0;}
4.2 Analisis Pengujian
4.2.1 Pengukuran kadar asap terhadap PWM
Pengujian yang dilakukan berdasarkan kadar asap yang diperoleh dan PWM yang yg ditampilkan pada LCD akan diperlihatkan pada table 4.1,table 4.2 dan table 4.3.
[image:35.595.170.451.275.470.2]Untuk sensor 1
Table 4.1 Pengamatan Sensor asap terhadap Asap rokok
NO Kadar Asap ( ppm ) Lebar Pulsa ( ms )
1 2 3 4 5 260 265 270 275 280 800 805 810 825 840
[image:35.595.176.450.524.715.2]Untuk sensor 2
Tabel 4.2 Pengamatan Sensor asap terhadap Asap rokok
NO Kadar Asap ( ppm ) Lebar Pulsa ( ms )
Untuk Sensor 3
Table 4.3 Pengamatan sensor Asap terhadap Asap rokok
NO Kadar Asap ( ppm ) Lebar Pulsa ( ms )
1
2
3
4
5
260
265
270
275
280
800
800
810
825
840
4.2.2Hubungan Lebar pulsa vs Kadar Asap
Berdasarkan data pengukuran hubungan PWM terhadap kadar asap pada tabel 4.1, tabel 4.2, tabel 4.3, dan tabel 4.4 maka dapat dibuat grafik hubungan PWM vs Kadar Asap seperti gambar 4.5, gambar 4.6, gambar 4.7, dan gambar 4.8 berikut ini :
Untuk Sensor 1
Gambar 4.5 Hubungan antara Lebar Pulsa dengan Kadar asap
Untuk Sensor 2
Gambar 4.6 Hubungan antara Lebar Pulsa dengan Kadar asap
790 800 810 820 830 840 850
255 260 265 270 275 280 285
Leb ar Pu lsa ( m s )
[image:37.595.190.460.250.423.2] [image:37.595.173.451.499.698.2]Kadar Asap ( ppm )
Grafik Lebar Pulsa vs Kadar
Asap
780 800 820 840 860255 260 265 270 275 280 285
Leb ar Pu lsa ( m s )
Kadar Asap ( ppm )
Untuk Sensor 3
Gambar 4.7 Hubungan antara Lebar Pulsa dengan Kadar asap
4.2.3 Menghitung nilai Perioda (Toff)
Berdasarkan pengujian pulsa/sinyal yang dilakukan maka diperoleh sinyal-sinyal PWM dengan duty cycle 25%, 50%,75% dan 100% seperti pada table tabel 4.1, tabel 4.2 fan tabel 4.3.Maka dapat diperoleh Ton dari masing-masing duty cycle yang ditentukan.
Dimana : Ton = lebar pulsa (ms)
A. Menghitung Ton dari sensor 1
Duty cycle 100%
1.
2.
3.
780
800 820 840 860
255 260 265 270 275 280 285
Leb
ar
Pu
lsa(
m
s )
[image:38.595.161.461.159.339.2]Kadar Asap ( ppm )
4.
5.
Duty cycle 75%
1.
2.
3.
4.
5.
Duty cycle 50%
1.
2.
3.
4.
5.
Duty cycle 25%
1.
2.
3.
4.
5.
B. Menghitung Ton dari sensor 2
Duty cycle 100%
6.
7.
8.
9.
10.
Duty cycle 75%
6.
7.
8.
9.
10.
Duty cycle 50%
6.
7.
8.
9.
10.
Duty cycle 25%
6.
7.
8.
9.
10.
C. Menghitung Ton dari sensor 3
Duty cycle 100%
11.
12.
13.
14.
15.
Duty cycle 75%
11.
12.
13.
14.
15.
Duty cycle 50%
11.
12.
13.
14.
15.
Duty cycle 25%
11.
12.
13.
14.
15.
4.2.4 Perhitungan Average voltage berdasarkan persamaan 2.5
[image:43.595.115.586.155.412.2]Sensor 1
Table 4.4 Perhitungan Average voltage
NO Vmax
( V )
Duty cycle Average Voltage (V)
Ton/( Ton + Toff) x Vmax
25 % 50% 75% 100%
Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton
(ms) 25% 50% 75% 100%
1 2 3 4 5 12 2400 2415 2430 2475 2520 800 805 810 825 840 800 805 810 825 840 800 805 810 825 840 266,66 268,33 270 275 280 800 805 810 825 840 0 0 0 0 0 800 805 810 825 840 3 3 3 3 3 6 6 6 6 6 9 9 9 9 9 12 12 12 12 12 Sensor 2
Table 4.5 Perhitungan Average voltage
NO Vmax
( V )
Duty cycle Average Voltage (V)
Ton/( Ton + Toff) x Vmax
25 % 50% 75% 100%
Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton
(ms) 25% 50% 75% 100%
[image:43.595.112.586.483.739.2]Sensor 3
Table 4.6 Perhitungan Average voltage
NO Vmax
( V )
Duty cycle Average Voltage (V)
Ton/( Ton + Toff) x Vmax
25 % 50% 75% 100%
Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton (ms) Toff (ms) Ton
(ms) 25% 50% 75% 100%
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian ini maka dapat disimpulkan sebagai berikut :
1. Berdasarkan data dan analisis yang diperoleh maka dapat disimpulkan bahwa pengaturan kecepatan kipas dapat dikendalikan dengan menggunakan metode PWM, dimana semakin banyak kadar asap yang terdeteksi maka semakin lebar pulsa high dan kecepatan kipas juga akan semakin cepat.
2. Dari data uji coba dan pengukuran menyatakan bahwa sensor MQ-2 yang digunakan dapat mendeteksi kadar asap. Dimana kadar asap yang terdeteksi sebanding dengan tegangan keluaran.
5.2 Saran
1. Berdasarkan data dan analisis dari alat yang telah dirancang disarankan untuk pengembangan selanjutnya, menggunakan asap selain asap rokok sebagi hasil perbandingan .
2. Berdasarkan data dan analisis dari alat yanga telah dirancang disarankan menggunakan sensor yang sensitifitasnya lebih bagus dari sensor MQ2 untuk mendapatkan data perubahan kadar asap yang lebih akurat.
BAB II
TEORI DASAR
2.1 Asap Rokok
Rokok merupakan campuran dari tembakau, cengkeh dan bahan lainnya yang dibungkus oleh kertas. Kandungan zat-zat yang ada pada rokok terdiri dari
nikotin, karbon monoksida (CO), Tar yang bersifat karsinogenikdan radikal bebas, seperti radikal nitric oxide (-NO, -NO2) dan sebagainya. Namun pada aplikasi ini hanya dibatasi dengan mengukur gas-gas yang dianggap mewakili kandungan asap rokok secara keseluruhan. Gas tersebut adalah Hydrogen dan
Ethanol.
Kebiasaan merokok tidak baik sebab lebih baik tidak merokok. Hal ini terbukti bahwa merokok bukan saja membahayakan bagi perokok aktif akan tetapi juga membahayakan kesehatan bagi perokok pasif . Artinya , merokok mendatangkan penyakit bagi perokok itu sendiri dan juga menggangu kesehatan orang lain atau lingkungan kesehatan. Pemerintah dan semua elemen masyarakat harus dapat mencegah jangan terus meluas atau bertambah jumlah perokok aktif di Indonesia sebab bila semakin banyak jumlah perokok aktif maka bertambah pula jumlah perokok pasif. Artinya, semakin banyak masyarakat yang terganggu kesehatannya dan semakin banyak limgkungan yang tidak sehat membuat orang yang berada pada lingkungan itu menjadi tidak sehat pula.
2.2 Sensor
2.2.1 Pengertian Umum Sensor
Secara garis besar sensor dapat dibagi menjadi 2 bagian, yaitu : a) Sensor kimia
b) Sensor fisika
Sensor fisika adalah alat yang mampu mendeteksi besaran suatu besaran berdasarkan hukum-hukum fisika. Ada beberapa jenis sensor fisika yang kita kenal seperti sensor suhu, sensor cahaya, sensor gerak dan lain-lain.
2.2.2 Sensor Asap MQ2
Sensor asap MQ2 merupakan sensor yang biasanya digunakan untuk mengetahui kualitas udara atau untuk mengetahui kandungan yang terjadi dalam udara. Sensor MQ2 tersebut terbuat dari bahan peka gas yaitu SnO2 . Jika sensor tersebut mendeteksi keberadaan gas tersebut di udara dengan tingkat konsentrasi tertentu, maka sensor akan menganggap terdapat asap rokok di udara. Ketika sensor mendeteksi keberadaan gas-gas tersebut, maka re-sistansi elektrik sensor akan turun. Dengan memanfaatkan prinsip kerja dari sensor MQ 2 ini, kandungan gas tersebut dapat diukur.
[image:47.595.171.491.550.664.2]Cara mendeteksi asap rokok yaitu dengan meletakkan sensor MQ 2 di dalam suatu ruangan, bila di dalam ruangan tersebut terdapat asap rokok, maka sensor akan mengeluarkan sinyal hambatan yang akan diolah oleh komputer. Gambar berikut menunjukkan dimensi sensor MQ 2 :
Gambar 2.2 Penampang atas sensor MQ 2
2.3 Mikrokontroller
Mikrokontroller adalah computer yang ekonomis yang dikemas dalam satu chip tetapi sudah mempunyai pengolah mikro, memori dan system I/O.Dengan demikian mikrokontroller dapat melakukan berbagai tugas , sesuai perintah dan data yang diisikan pada memorinya.
Dalam mempelajari mikrokontroller , pengetahuan dasar dari satu jenis mikrokontroller saja sudah cukup untuk mengetahui jenis mikrokontroler jenis lain, karena pada dasarnya prinsip operasi mikrokontroller adalah relative sama. Dengan demikian mempelajari mikrokontroller 8 bit sangat menarik, karena dimulai dari aliran data yang sederhana di dalam bagian – bagian yang jelas hubungannya dengan fungsinya, sehingga akan dapat dibayangkan urutan pekerjaan bagian – bagian dan aliran data di dalamnya.Program dalam bahasa Assembly dapat dengan jelas menggambarkan proses dan aliran data di dalam chip sesuai perintah pada program sejak data masuk, kemudian diolah sampai data dikirimkan keluar dari chip untuk ditampilkan. Di samping bahasa Assembly, dapat juga dipakai bahasa C dan basic ; tetapi karena kesederhanaan bahsa Assembly dan juga kecepatan eksekusinya , membuat bahasa ini cukup disenangi.
2.3.1 Mikrokontroler ATmega 8
Mikrokontroler ATMega8 yang merupakan bagian dari keluarga mikrokontroler CMOS 8-bit buatan Atmel. AVR mempunyai 32 register general-purpose,
Beberapa dari mikrokontroler atmel AVR mempunyai ADC internal dan PWM internal. AVR juga mempunyai In-Sistem Programmable Flash on-chip
yang mengijinkan memori program untuk diprogram berulang-ulang dalam sistem menggunakan hubungan serial SPI.
(RESET) PC 6 (RXD) PD 0
[image:49.595.216.406.169.333.2](TXD) PD1 (INT0) PD2 (INT1) PD3 (XCK/T0) PD4 VCC GND (XTAL1/TOSC1) PB6 (XTAL2/TOSC2) PB2 (T1) PD5 (AIN0) PD6 (AIN1) PD7 (ICP1) PB0 PC5 (ADC5/SCL) PC4 (ADC4/SD4) PC3 (ADC3) PC2 (ADC2) PC1 (ADC1) PC0 (ADC0) GND AREF AVCC PB5 (SCK) PB4 (MISO) PB3 (MOSI/OC2) PB2 (SS/OC1B) PB1 (OC1A) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 A T M E G A 8
Gambar 2.3 Konfigurasi Pin Mikrokontroler ATMEGA 8
2.3.2 Konfigurasi Pin Mikrokontroler AVR ATMEGA 8
VCC
Suplai tegangan digital. Besarnya tegangan berkisar antara 4,5 – 5,5V untuk ATmega8 dan 2,7 – 5,5V untuk ATmega8L.
GND
Ground. Referensi nol suplai tegangan digital.
(PB7..PB0)
PORTC(PC5..PC0)
PORTC adalah port I/O dua-arah (bidirectional) 7-bit dengan resistor pull-up internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai input, pin yang di pull-low secara eksternal akan memancarkan arus jika resistor pull-up-nya diaktifkan. Pin-pin PORTC akan berada pada kondisi tri-state ketika RESET aktif, meskipun clock tidak running.
PC6/RESET
Jika Fuse RSTDISBL diprogram, maka PC6 berfungsi sebagai pin I/O akan tetapi dengan karakteristik yang berbeda dengan PC5..PC0. Jika Fuse RSTDISBL tidak diprogram, maka PC6 berfungsi sebagai masukan Reset. Sinyal LOW pada pin ini dengan lebar minimum 1,5 mikrodetik akan membawa mikrokontroler ke kondisi Reset, meskipun clock tidak running.
PORTD (PD7..PD0)
PORTD adalah port I/O dua-arah (bidirectional) 8-bit dengan resistor pull-up internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai input, pin yang di pull-low secara eksternal akan memancarkan arus jika resistor pull-up-nya diaktifkan. Pin-pin PORTD akan berada pada kondisi tri-state ketika RESET aktif, meskipun clock tidak running.
RESET
Pin masukan Reset. Sinyal LOW pada pin ini dengan lebar minimum 1,5 mikrodetik akan membawa mikrokontroler ke kondisi Reset, meskipun clock tidak running. Sinyal dengan lebar kurang dari 1,5 mikrodetik tidak menjamin terjadinya kondisi Reset.
AVCC
ini harus dihubungkan dengan VCC, meskipun ADC tidak digunakan. Jika ADC digunakan, VCC harus dihubungkan ke AVCC melalui low-pass filter untuk mengurangi noise.
AREF
Pin Analog Reference untuk ADC.
ADC7.ADC6
Analog input ADC. Hanya ada pada ATmega8 dengan package TQFP dan QFP/MLF.
2.3.3 Arsitektur Mikrokontroler ATMega 8
Gambar 2.4 Arsitektur Atmega 8
dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
I
T
H
S
V
N
Z
C
7
6
5
4
3
2
1
[image:53.595.120.486.211.344.2]SREG
Bit
Read/
Write
R/W
Initial
Value
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
0
Gambar 2.5 Status Register ATMega8
Bit 7(I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi di jalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat diset dan di-reset melalui aplikasi dan intruksi SEI dan CLL.
Bit 6(T)
dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative
Flag (N) dan two’s Complement Overflow Flag (V).
Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi
aritmatika dua komplemen.
Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atai aritmatika.
Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalam
sebuah fungsi aritmatika atau logika.
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika.
2.3.4 Memori AVR Atmega
Flash
Boot Section
F_END $000
Data Memory
32 General purpose registers
Additional I/O registers
64 I/O register
s
Internal RAM
EEPROM $0000
$001F $0020
$005F $0060
RAMEND
$000
[image:55.595.131.486.282.569.2]E_END
Gambar 2.6 Peta Memori Atmega
Memori atmega terbagi menjadi tiga yaitu : 1. Memori Flash
flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
2. Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan program. Memori data terbagi menjadi empat bagian yaitu :32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik fungsi dan nilai-nilai yang dapat memperingan kerja ALU. Dalam istilah processor komputer sahari-hari GPR dikenal sebagai “chace memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontroler MCS51 dikenal sebagi SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu daya.
2.4 Modulasi
Proses modulasi dilakukan pada bagian pemancar. Proses kebalikannya yang disebut demodulasi dilakukan pada bagian penerima. Dalam demodulasi, sinyal pesan dipisahkan dari sinyal pembawa frekuensi tinggi.
Transmisi sinyal adalah proses dimana sebuah sinyal pembawa informasi ( atau pesan) dikirimkan ( dipancarkan ) melewati suatu bentuk kanal komunikasi.Penyaringan sinyal , disebut juga filtering , adalah proses mengubah kandungan spectrum sebuah sinyal dengan tujuan mendapatkan kualitas transmisi dan resepsi ( penerimaan ) sinyal yang lebih baik.Kanal-kanal komunikasi dan filter sering kali dapat dimodelkan secara matematis sebagai sebuah system linear yang tidak berubah waktu ( time – invariant). Perpndahan frekuensi dapat diwujudkan melalui proses modulasi. Modulasi didefenisikan sebagai proses mengubah beberapa karakteristik tertentu dari sebuah sinyal pembawa (carrier), sesuai dengan karakteristik sinyal pemodulasi. Di sini sinyal pemodulasi adalah sinyal pesan yang akan dibawa , sedangkan hasil dari modulasi ( yaitu, sinyal pembawa yang telah berubah karakteristiknya ) disebut sebagai sinyal termodulasi.Untuk mentransmisikan sinyal-sinyal pesan analog harus terlebih dahulu diubah menjadi sinyal digital , dan prosesnya disebut sebagai konversi analog ke digital atau dikenal pula dengan nama modulasi pulsa digital.
Dengan modulasi pulsa, sinyal informasi diubah menjadi pulsa-pulsa persegi dengan frekuensi dan amplitude tetap tapi dengaan lebar pulsa sebanding dengan amplitude sinyal informasi. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar waktu tunda positif ataupun tunda negative pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama
Pulse Width Modulation (PWM).
2.4.1 Modulasi Lebar Pulsa
lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya. Semakin besar perbandingan lama sinyal high dengan perioda sinyal maka semakin cepat motor berputar.
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut. Salah satu cara untuk dapat memberikan tegangan masukan yang berbeda pada motor DC adalah dengan menerapkan teknik Modulasi Lebar Pulsa ( Pulse Width Modulation , PWM ). Secara umum PWM adalah sebuah cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam suatu perioda, yang akan digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata – rata yang berbeda. Penggunaan PWM sangat banyak, mulai dari pemodulasian data untuk telekomunikasi, pengontrollan daya atau tegangan yang masuk ke beban, regulator tegangan , audio effect dan penguatan, serta aplikasi – aplikasi lainnya.
Modulasi lebar pulsa dapat pula dikatakan sebagai cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam satu perioda. Modulasi lebar pulsa digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda.
Cara lain membangkitkan sinyal PWM adalah dengan menggunakan rangkaian mikrokontroler. Dengan menggunakan rangkaian mikrokontroler dapat dikirimkan
output ‘1’ dan ‘0’ sesuai dengan periode yang diinginkan melalui aplikasi
2.4.2 Prinsip Dasar PWM
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut.
[image:59.595.132.502.325.470.2]Modulasi lebar pulsa dapat pula dikatakan sebagai cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam satu perioda. Modulasi lebar pulsa digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda.
Gambar 2.7 Bentuk gelombang kotak (pulsa) dengan kondisi high 5V dan
low 0V
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi
(baca: high atau 1) dan,Toff adalah waktu dimana tegangan keluaran berada pada
posisi rendah (baca: low atau 0).Anggap Ttotal adalah waktu satu siklus atau
penjumlahan antara Ton dengan Toff , biasa dikenal dengan istilah “periode satu gelombang”.
Ttotal = Ton + Toff ………. (2.1)
………... (2.2)
Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai berikut,
sehingga : ... (2.3)
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat
diubah-ubah secara langsung dengan mengubah
nilai Ton.Apabila Ton adalah 0, Vout juga akan 0.Apabila Ton adalah Ttotal maka Vo
ut adalah Vin atau katakanlah nilai maksimumnya.Dengan menghitung duty cycle
yang diberikan , akan didapat tegangan output yang dihasilkan.
...(2.4)
Average voltage merupakan tegangan output pada motor yang dikontrol oleh sinyal PWM.Dengan menggunakan rumus di atas , maka akan didapatkan tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan. PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off menjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka temperatur (suhu) air yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah
sinyal tegangan dc yang
dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut.
Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
2.5 Motor Arus Searah
[image:61.595.194.432.425.565.2]Motor DC dapat berfungsi sebagai motor apabila didalam motor listrik tersebut terjadi proses konversi dari energy listrik menjadi energy mekanik. Motor DC itu sendiri memerlukan suplai tegangan yang searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energy mekanik. Pada motor dc kumparan medan disebut stator (bagian yang tidakberputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
Gambar 2.9 Bagian – Bagian Motor DC
1.Badan Mesin
bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar kuat, seperti dari besi tuang dan plat campuran baja.
2.Inti kutub magnet dan belitan penguat magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan mesin.
3.Sikat-sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas, dan juga memegang peranan penting untuk terjadinya proses komutasi.
4.Komutator
Komutator ini berfungsi sebagai penyearah mekanik yang akan dipakai bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi terjadi pada saat sisi kumparan berbeda.
5.Jangkar
Jangkar dibuat dari bahan ferromagnetic dengan maksud agar kumparan jangkar terletak dalam daerah yang induksi magnetiknya besar, agar ggl induksi yang dihasilkan dapat bertambah besar.
6.Belitan jangkar
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah, berfungsi untuk tempat timbulnya tenaga putar motor.
2.5.1 Prinsip Kerja motor DC
Sebatang konduktor yang dialiri listrik dan ditempatkan di dalam suatu magnet akan mengalami gaya yang sebanding dengan arus dan kekuatan medan magnetnya. Gaya yang ditimbulkan dapat dirumuskan sebagai berikut:
dalam hal ini,
F = gaya medan magnet (N)
B = kerapatan fluks Magnet (webwer/m2) I = arus listrik yang mengalir (ampere) L = panjang kawat penghantar (meter)
Persamaan (2.5) merupakan prinsip dasar sebuah motor, dimana terjadinya proses perubahan energi listrik (I) akan menimbulkan gaya mekanik (F). Jika motor mempunyai jari-jari sebesar r, maka akan menimbulkan torsi sebesar :
T = F . r = B . I . L . r ………(2.6)
Dalam hal ini,
T = torsi
F = gaya mekanik (newton)
Secara sederhana dikatakan bahwa motor listrik bekerja dengan prinsip bahwa dua medan magnet dapat dibuat berinteraksi untuk menghasilkan gerakan. Tujuan motor adalah untuk menghasilkan gaya yang menggerakkan ( torsi ). Motor arus searah jarang digunakan pada aplikasi industry umum karena semua system utility diperlengkapi dengan perkakas arus bolak-balik. Meskipun demikian , untuk aplikasi khusus, adalah menguntungkan jika mengubah arus bolak-balik menjadi arus searah dengan menggunakan motor dc. Motor arus searah digunakan dimana control torsi dan kecepatan dengan rentang yang lebar diperlukan untuk memenuhi kebutuhan aplikasi. Meskipun demikian, susunan sikat- komutator menimbulkan masalah pada pemeliharaan sikat dan bunga api listrik.
kecepatan motor.Inverter disusun dari saklar elektronis yang mengatur daya dc
ON dan OFF menghasilkan output daya ac yang dapat dikontrol pada frekuensi dan tegangan yang diinginkan. Regulator memodifikasi inverter karakteristik penghubungan sehingga frekuensi output dapat dikontrol .Inputnya termasuk sensor yang mengukur variable control. Saat ini ada tiga jenis desain inverter utama, yaitu inverter sumber arus, inverter tegangan variable, dan inverter lebar pulsa termodulasi( inverter PWM). Inverter PWM meyempurnakan baik control frekuensi maupun tegangan pada bagian output penggerak.Penyearah diode menyediakan tegangan dc konstan. Karena inverter menerima tegangan tertentu , maka amplitude bentuk tegangan output selalu konstan.Inverter mengatur lebar tegangan output sehingga hamper berbentuk sinus.
Makin baik bentuk gelombang , semakin sedikit penyaringan yang diperlukan .Inverter PWM adalah yang paling rumit dan paling mahal dari tiga jenis penggerak kecepatan variable ac lainnya. Penggerak PWM ada dari satu sampai dengan 1000 hp.
2.6 Transistor sebagai Saklar Elektronik
Transistor daya memiliki karakteristik kontrol untuk menyala dan mati. Transistor digunakan sebagai elemen saklar, dioperasikan dalam wilayah saturasi, menghasilkan dalam drop tegangan kondisi-ON yang rendah. Kecepatan pensaklaran transistor modern lebih tinggi daripada thyristor dan transistor tersebut sering dipakai dalam konverter DC-DC dan DC-AC, dengan diode terhubung paralel terbalik untuk menghasilkan aliran arus dua arah. Meskipun begitu, tingkat tegangan dan arusnya lebih rendah daripada thyristor dan transistor secara normal digunakan dalam aplikasi daya rendah sampai menengah.
transistor akan jatuh pada Daerah Potong dan IC = 0. Karena IC = 0, maka tegangan yang melintas tahanan beban RC adalah nol dan tegangan output VO =
[image:65.595.195.424.183.374.2]Vcc. Pada kondisi ini, seolah-olah Transistor seperti sebuah saklar yang terputus (off).
Gambar 2.10 Rangkaian Transistor sebagai saklar
Jika tegangan input, vi, terus meningkat sehingga Dioda Emiter diberi prategangan maju, Transistor akan mulai masuk ke daerah aktif, sehingga:
B BE i B
R V v
I (2.7)
Sekali Transistor mulai aktif, belum diketahui apakah Transistor berada pada Daerah Aktif atau berada pada Daerah Saturasi. Dengan menggunakan aturan tegangan Kirchoff (KVL) pada putaran Dioda Kolektor, akan didapat:
CE C C
CC I R V
V (2.8)
sehingga:
C CE CC C
R V V
Persamaan (2.9) adalah persamaan Garis Beban Transistor. Dalam bentuk grafik, garis ini diperlihatkan dalam Gambar 2.11.
Bersamaan dengan terus menaiknya arus Basis, IB, Transistor dapat beroperasi sepanjang Garis Beban. Hal ini terus terjadi, sehingga arus Basis, IB, mencapai harga arus yang terbesar, IB3. Arus ini dikenal dengan arus saturasi dan jika Transistor beroperasi pada kondisi ini, maka dikatakan ia berada pada Daerah Saturasi. Oleh karena itu, arus Kolektor adalah:
C CE CC C
R sat V V sat
I ( ) ( ) (2.10)
Biasanya, harga VCE(sat) adalah 0.2 volt. Pada kondisi ini, Transistor bekerja seperti sebuah saklar yang terhubung (on).
saturasi
Cut off Vcc/Rc
Vcc Vce
Ic
IB3
IB2
[image:66.595.141.481.359.573.2]IB1
Gambar 2.11 Garis Beban dan Titik Operasi Transistor
2.7 LCD ( Liquid Crystal Display)
LCD ( Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan Kristal cair sebagai penampil utama. Mikrokontroler sebagai chip miniature dari system computer , tentunya membutuhkan media penampil output layaknya sebuah monitor. Kita dapat mengkonfigurasi I/O dari chip mikro pada kit rangkaian elektronik melalui berbagai bahasa pemrograman yang mampu mengkompiler menjadi file berekstensi HEX agar dapat diflashing ke chip mikro. LCD berfungsi menampilkan suatu nilai hasil sensor, menampilkan teks atau menampilkan menu pada aplikasi mikrokontroler. LCD yang digunakan adalah LCD M1632. LCD M1632 merupakan modul LCD dengan tampilan 16 x 2 baris dengan konsumsi daya rendah.
Adapun fitur yang disajikan dalam LCD adalah : a. Terdiri dari 16 karakter dan 2 baris b. Mempunyai 192 karakter tersimpan c. Terdapat karakter generator terprogram d. Dapat dialamati dengan mode 4-bit dan 8-bit e. Dilengkapi dengan blacklight
[image:67.595.200.434.568.667.2]Modul ini dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD . Kegunaan LCD banyak sekali di dalam perancangan suatu system dengan menggunakan mikrokontroler. LCD dapat berfungsi untuk menampilkan nilai suatu sensor ,menapilkan teks, atau menampilkan menu pada aplikasi mikrokontroler.
Urutan pin 1 biasanya dimulai dari sebelah kiri ( terletak di pojok kiri atas) dan untuk LCD yang memiliki 16 pin ,2 pin terakhir adalah anoda dan katoda untuk backlighting.
Tabel 2.1. Tabel fungsi pin LCD M1632
No. Simbol Level Fungsi
1 Vss -
Power Supply
0V (GND)
2 Vcc - 5V ± 10%
3 Vcc - LCD Drive
4 RS H/L H: Data In L: Instrustion In
5 R/W H/L H: Read L: Write
6 E H,↓ Sinyal Enable
7 DB0 H/L
Data Bus
8 DB1 H/L
9 DB2 H/L
10 DB3 H/L
11 DB4 H/L
12 DB5 H/L
13 DB6 H/L
14 DB7 H/L
15 V+BL - Back light Supply 4-4,2V 50-200mA
16 V-BL - 0V (GND)
Sebagaimana terlihat pada kolom di atas,Interface LCD merupakan sebuah parallel bus,dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD.Mode 8 bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O. Aplikasi dengan LCD dapat dibuat dengan mudah dan waktu yang singkat, mengingat koneksi parallel yang cukup mudah antara controller dan LCD. Gambar berikut adalah contoh LCD ( 2 x 16 ) yang umum digunakan :
BAB I
PENDAHULUAN
1.1
Latar Belakang
Asap rokok sangat berbahaya bagi kesehatan manusia karena mengandung zat yang mematikan, seperti nikotin salah satunya. Walaupun asap rokok ini berbahaya,kebutuhan akan rokok tidak dapat dihentikan karena besarnya permintaan konsumen dan kebanyakan orang tidak peduli akan efek negatif asap rokok. Saat ini, jumlah manusia pecandu rokok semakin meningkat. Dengan demikian, produktivitas perusahaan semakin meningkat juga melihat jumlah kosumen yang semakin banyak. Beberapa negara khususnya Indonesia, devisa terbesar diperoleh dari perusahaan rokok. Karena itu, perusahaan rokok semakin agresif untuk meningkatkan daya tarik konsumen, perusahaan menghubungkan rokok dengan gaya hidup modern, tanpa harus memikirkan dampak negatif dari rokok tersebut. Sasaran yang paling mudah terpengaruh dengan agresi itu adalah anak remaja.
Banyak cara yang dilakukan untuk meminimalisir bahaya asap rokok bagi perokok pasif, salah satunya dengan cara membuat stiker atau pun larangan untuk tidak merokok. Namun ternyata cara ini kurang efektif karena masih ada orang yang merokok walaupun sudah mengetahui larangan tersebut.Untuk mengefektifkan larangan merokok dalam ruangan tertentu, pada skripsi ini penulis bermaksud membuat suatu alat pengendali asap rokok dalam suatu ruangan dengan menggunakan metode PWM ( Pulse Width Modulation) berbasis mikrokontroler.
Mikrokontroler adalah alat elektronika digital yang mempunyai masukan, keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus. Cara kerja mikrokontroler sebenarnya membaca dan menulis data. Secara
elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung. PWM merupakan suatu metode untuk mengatur kecepatan perputaran motor dengan cara mengatur lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor DC sebagai sumber daya. Semakin besar perbandingan lama sinyal high dengan perioda sinyal maka semakin tinggi laju motor DC.
Dengan keadaan seperti yang telah dijelaskan, maka penulis membuat alat
yaitu : ‘SISTEM PENGENDALIAN ASAP ROKOK MULTIKANAL DENGAN MENGGUNAKAN PWM BERBASIS MIKROKONTROLER
ATMEGA 8’. Alat tersebut dirancang agar dapat diaplikasikan pada ruangan tertentu . System pada detector ini bertujuan untuk mempercepat laju kipas seiring dengan bertambahnya kadar asap rokok dalam suatu ruangan.
1.2
Rumusan Masalah
Yang menjadi rumusan masalah dalam penelitian ini adalah : 1. Bagaimana merancang suatu alat untuk mendeteksi dan mengendalikan asap rokok pada sebuah ruangan?
2. Bagaimana prinsip kerja sensor asap dalam mengendalikan dan mendeteksi asap rokok?
1.3
Batasan Masalah
Adapun batasan masalah yang akan dibahas dalam penelitian ini adalah :
1.Sistem detector yang dirancang adalah untuk mendeteksi dan mengendalikan asap rokok dalam ruangan
2.Sensor yang digunakan adalah sensor asap MQ 2.
3. Pemrograman dilakukan dengan mikrokontroler ATMega 8. 4. Bahasa pemrograman untuk mikrokontroler ini adalah bahasa C. 5. Ruangan yang digunakan hanya dibuat dalam bentuk simulasi
1.4
Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah:
1. Merancang suatu alat yang dapat mendeteksi dan mengendalikan asap secara otomatis dengan menggunakan metode PWM
2. Memanfaatkan sensor asap MQ2 sebagai sensor pendeteksi asap
1.5
Manfaat Penelitian
Adapun manfaat yang diperoleh dari penelitian ini adalah:
1. Untuk menetralisir udara dalam ruangan sehingga kesehatan orang yang tidak merokok tidak terganggu.
SMOKE CONTROL SYSTEM MULTICHANNEL PWM USING MICROCONTROLLER ATMEGA 8
ABSTRACT
Has been designed and realized a series of control and smoke detector in the room Smoke Control Systems Using Multi-Channel PWM-Based Microcontroller Atmega 8. Skema is designed based on microcontroller Atmega 8 and using MQ 2 sensor as an input to detect smoke in the room. Sensor is have a high level of sensitivity to the two gases are Hydrogen and Ethanol is considered to represent the gases contained in smoke. When smoke is detected the sensor resistance will decline, and rise again if smoke is detected density decreases. Once smoke is detected smoke concentrations measured values are displayed on the LCD and will drop proportional to the decline in cigarette smoke also detected. Fan speed will be proportional to the pulse width high is already in the program in accordance with microcontroller smoke levels were detected in room. This system has been tested and construction tool is only in the form of simulation.
SKRIPSI
VALENTINA BR GINTING 090801024
PROGRAM STUDI SARJANA FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
SISTEM PENGENDALIAN ASAP ROKOK MULTIKANAL DENGAN MENGGUNAKAN PWM BERBASIS MIKROKONTROLER ATMEGA 8
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains