BAB II
TEORI DASAR
2.1 Asap Rokok
Rokok merupakan campuran dari tembakau, cengkeh dan bahan lainnya yang
dibungkus oleh kertas. Kandungan zat-zat yang ada pada rokok terdiri dari
nikotin, karbon monoksida (CO), Tar yang bersifat karsinogenikdan radikal bebas, seperti radikal nitric oxide (-NO, -NO2) dan sebagainya. Namun pada aplikasi ini hanya dibatasi dengan mengukur gas-gas yang dianggap mewakili
kandungan asap rokok secara keseluruhan. Gas tersebut adalah Hydrogen dan
Ethanol.
Kebiasaan merokok tidak baik sebab lebih baik tidak merokok. Hal ini
terbukti bahwa merokok bukan saja membahayakan bagi perokok aktif akan tetapi
juga membahayakan kesehatan bagi perokok pasif . Artinya , merokok
mendatangkan penyakit bagi perokok itu sendiri dan juga menggangu kesehatan
orang lain atau lingkungan kesehatan. Pemerintah dan semua elemen masyarakat
harus dapat mencegah jangan terus meluas atau bertambah jumlah perokok aktif
di Indonesia sebab bila semakin banyak jumlah perokok aktif maka bertambah
pula jumlah perokok pasif. Artinya, semakin banyak masyarakat yang terganggu
kesehatannya dan semakin banyak limgkungan yang tidak sehat membuat orang
yang berada pada lingkungan itu menjadi tidak sehat pula.
2.2 Sensor
2.2.1 Pengertian Umum Sensor
Secara umum sensor didefenisikan sebagai alat yang mampu menangkap
fenomena fisika atau kimia kemudian mengubahnya menjadi sinyal elektrik baik
arus listrik ataupun tegangan. Fenomena fisik yang mampu menstimulus sensor
Secara garis besar sensor dapat dibagi menjadi 2 bagian, yaitu :
a) Sensor kimia
b) Sensor fisika
Sensor fisika adalah alat yang mampu mendeteksi besaran suatu besaran
berdasarkan hukum-hukum fisika. Ada beberapa jenis sensor fisika yang kita
kenal seperti sensor suhu, sensor cahaya, sensor gerak dan lain-lain.
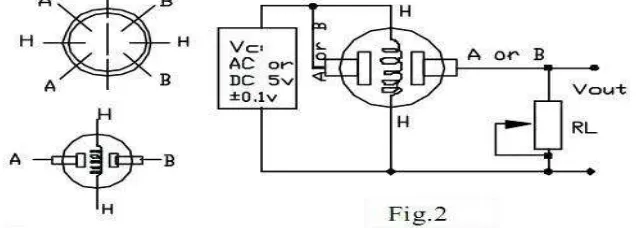
2.2.2 Sensor Asap MQ2
Sensor asap MQ2 merupakan sensor yang biasanya digunakan untuk mengetahui
kualitas udara atau untuk mengetahui kandungan yang terjadi dalam udara. Sensor
MQ2 tersebut terbuat dari bahan peka gas yaitu SnO2 . Jika sensor tersebut
mendeteksi keberadaan gas tersebut di udara dengan tingkat konsentrasi tertentu,
maka sensor akan menganggap terdapat asap rokok di udara. Ketika sensor
mendeteksi keberadaan gas-gas tersebut, maka re-sistansi elektrik sensor akan
turun. Dengan memanfaatkan prinsip kerja dari sensor MQ 2 ini, kandungan gas
tersebut dapat diukur.
Cara mendeteksi asap rokok yaitu dengan meletakkan sensor MQ 2 di
dalam suatu ruangan, bila di dalam ruangan tersebut terdapat asap rokok, maka
sensor akan mengeluarkan sinyal hambatan yang akan diolah oleh komputer.
Gambar berikut menunjukkan dimensi sensor MQ 2 :
Gambar 2.2 Penampang atas sensor MQ 2
2.3 Mikrokontroller
Mikrokontroller adalah computer yang ekonomis yang dikemas dalam satu chip
tetapi sudah mempunyai pengolah mikro, memori dan system I/O.Dengan
demikian mikrokontroller dapat melakukan berbagai tugas , sesuai perintah dan
data yang diisikan pada memorinya.
Dalam mempelajari mikrokontroller , pengetahuan dasar dari satu jenis
mikrokontroller saja sudah cukup untuk mengetahui jenis mikrokontroler jenis
lain, karena pada dasarnya prinsip operasi mikrokontroller adalah relative sama.
Dengan demikian mempelajari mikrokontroller 8 bit sangat menarik, karena
dimulai dari aliran data yang sederhana di dalam bagian – bagian yang jelas hubungannya dengan fungsinya, sehingga akan dapat dibayangkan urutan
pekerjaan bagian – bagian dan aliran data di dalamnya.Program dalam bahasa Assembly dapat dengan jelas menggambarkan proses dan aliran data di dalam
chip sesuai perintah pada program sejak data masuk, kemudian diolah sampai data
dikirimkan keluar dari chip untuk ditampilkan. Di samping bahasa Assembly,
dapat juga dipakai bahasa C dan basic ; tetapi karena kesederhanaan bahsa
Assembly dan juga kecepatan eksekusinya , membuat bahasa ini cukup disenangi.
2.3.1 Mikrokontroler ATmega 8
Mikrokontroler ATMega8 yang merupakan bagian dari keluarga mikrokontroler
CMOS 8-bit buatan Atmel. AVR mempunyai 32 register general-purpose,
Beberapa dari mikrokontroler atmel AVR mempunyai ADC internal dan
PWM internal. AVR juga mempunyai In-Sistem Programmable Flash on-chip
yang mengijinkan memori program untuk diprogram berulang-ulang dalam sistem
menggunakan hubungan serial SPI.
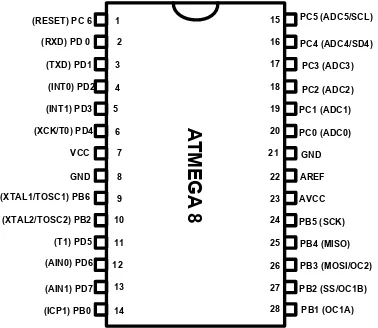
Gambar 2.3 Konfigurasi Pin Mikrokontroler ATMEGA 8
2.3.2 Konfigurasi Pin Mikrokontroler AVR ATMEGA 8
VCC
Suplai tegangan digital. Besarnya tegangan berkisar antara 4,5 – 5,5V untuk ATmega8 dan 2,7 – 5,5V untuk ATmega8L.
GND
Ground. Referensi nol suplai tegangan digital.
(PB7..PB0)
PORTB adalah port I/O dua-arah (bidirectional) 8-bit dengan resistor pull-up
internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang
simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai
input, pin yang di pull-low secara eksternal akan memancarkan arus jika resistor
pull-up-nya diaktifkan. Pin-pin PORTB akan berada pada kondisi tri-state ketika
PORTC(PC5..PC0)
PORTC adalah port I/O dua-arah (bidirectional) 7-bit dengan resistor pull-up
internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang
simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai
input, pin yang di pull-low secara eksternal akan memancarkan arus jika resistor
pull-up-nya diaktifkan. Pin-pin PORTC akan berada pada kondisi tri-state ketika
RESET aktif, meskipun clock tidak running.
PC6/RESET
Jika Fuse RSTDISBL diprogram, maka PC6 berfungsi sebagai pin I/O akan tetapi
dengan karakteristik yang berbeda dengan PC5..PC0. Jika Fuse RSTDISBL tidak
diprogram, maka PC6 berfungsi sebagai masukan Reset. Sinyal LOW pada pin ini
dengan lebar minimum 1,5 mikrodetik akan membawa mikrokontroler ke kondisi
Reset, meskipun clock tidak running.
PORTD (PD7..PD0)
PORTD adalah port I/O dua-arah (bidirectional) 8-bit dengan resistor pull-up
internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang
simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai
input, pin yang di pull-low secara eksternal akan memancarkan arus jika
resistor pull-up-nya diaktifkan. Pin-pin PORTD akan berada pada kondisi tri-state
ketika RESET aktif, meskipun clock tidak running.
RESET
Pin masukan Reset. Sinyal LOW pada pin ini dengan lebar minimum 1,5
mikrodetik akan membawa mikrokontroler ke kondisi Reset, meskipun clock
tidak running. Sinyal dengan lebar kurang dari 1,5 mikrodetik tidak menjamin
terjadinya kondisi Reset.
AVCC
ini harus dihubungkan dengan VCC, meskipun ADC tidak digunakan. Jika ADC
digunakan, VCC harus dihubungkan ke AVCC melalui low-pass filter untuk
mengurangi noise.
AREF
Pin Analog Reference untuk ADC.
ADC7.ADC6
Analog input ADC. Hanya ada pada ATmega8 dengan package TQFP dan
QFP/MLF.
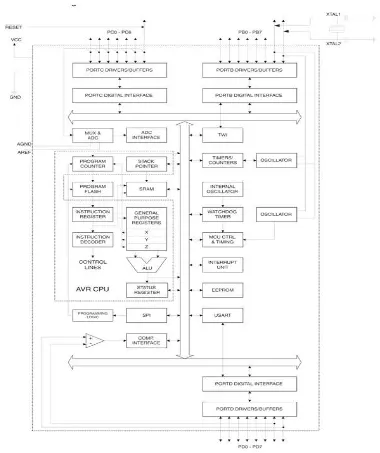
2.3.3 Arsitektur Mikrokontroler ATMega 8
ATmega8 memiliki banyak fitur yang sama dengan ATmega32. Tapi itu telah
mengurangi jumlah fitur dan kemampuan, namun memiliki fitur yang cukup
untuk bekerja. Untuk membuat sebuah proyek lebih baik dengan menggunakan
Gambar 2.4 Arsitektur Atmega 8
Pada AVR status register mengandung beberapa informasi mengenai hasil dari
kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk
altering arus program sebagai kegunaan untuk meningkatkan performa
pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic unit)
hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian
Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang
dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih
sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika
memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah
setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui
software. Berikut adalah gambar status register.
I
T
H
S
V
N
Z
C
Gambar 2.5 Status Register ATMega8
Bit 7(I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua perintah
interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan
pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik
yang individual maupun yang secara umum akan di abaikan. Bit ini akan
dibersihkan atau cleared oleh hardware setelah sebuah interupsi di jalankan dan
akan di-set kembali oleh perintah RETI. Bit ini juga dapat diset dan di-reset
melalui aplikasi dan intruksi SEI dan CLL.
Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and
BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah
dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke
dapat disalin ke dalam bit di dalam register pada Register File dengan
menggunakan perintah BLD.
Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam
beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative
Flag (N) dan two’s Complement Overflow Flag (V).
Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi
aritmatika dua komplemen.
Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di
dalam sebuah fungsi logika atai aritmatika.
Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalam
sebuah fungsi aritmatika atau logika.
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam
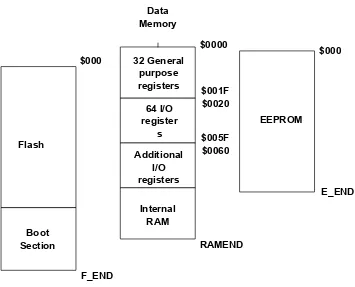
Gambar 2.6 Peta Memori Atmega
Memori atmega terbagi menjadi tiga yaitu :
1. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash
flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian
aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah
bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk
menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui
USART.
2. Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan program.
Memori data terbagi menjadi empat bagian yaitu :32 GPR (General Purphose
Register) adalah register khusus yang bertugas untuk membantu eksekusi program
oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi
harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global
atau nilai balik fungsi dan nilai-nilai yang dapat memperingan kerja ALU. Dalam
istilah processor komputer sahari-hari GPR dikenal sebagai “chace memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk
mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port,
timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontroler
MCS51 dikenal sebagi SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off),
digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu
daya.
2.4 Modulasi
Modulasi adalah suatu proses dimana parameter gelombang pembawa (carrier
signal) frekuensi tinggi diubah sesuai dengan salah satu parameter sinyal
Proses modulasi dilakukan pada bagian pemancar. Proses kebalikannya yang
disebut demodulasi dilakukan pada bagian penerima. Dalam demodulasi, sinyal
pesan dipisahkan dari sinyal pembawa frekuensi tinggi.
Transmisi sinyal adalah proses dimana sebuah sinyal pembawa informasi (
atau pesan) dikirimkan ( dipancarkan ) melewati suatu bentuk kanal
komunikasi.Penyaringan sinyal , disebut juga filtering , adalah proses mengubah
kandungan spectrum sebuah sinyal dengan tujuan mendapatkan kualitas transmisi
dan resepsi ( penerimaan ) sinyal yang lebih baik.Kanal-kanal komunikasi dan
filter sering kali dapat dimodelkan secara matematis sebagai sebuah system linear
yang tidak berubah waktu ( time – invariant). Perpndahan frekuensi dapat diwujudkan melalui proses modulasi. Modulasi didefenisikan sebagai proses
mengubah beberapa karakteristik tertentu dari sebuah sinyal pembawa (carrier), sesuai dengan karakteristik sinyal pemodulasi. Di sini sinyal pemodulasi adalah
sinyal pesan yang akan dibawa , sedangkan hasil dari modulasi ( yaitu, sinyal
pembawa yang telah berubah karakteristiknya ) disebut sebagai sinyal
termodulasi.Untuk mentransmisikan sinyal-sinyal pesan analog harus terlebih
dahulu diubah menjadi sinyal digital , dan prosesnya disebut sebagai konversi
analog ke digital atau dikenal pula dengan nama modulasi pulsa digital.
Dengan modulasi pulsa, sinyal informasi diubah menjadi pulsa-pulsa
persegi dengan frekuensi dan amplitude tetap tapi dengaan lebar pulsa sebanding
dengan amplitude sinyal informasi. Salah satu teknik modulasi pulsa yang
digunakan adalah teknik modulasi durasi atau lebar waktu tunda positif ataupun
tunda negative pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama
Pulse Width Modulation (PWM).
2.4.1 Modulasi Lebar Pulsa
PWM merupakan suatu teknik teknik-dalam mengatur kerja suatu peralatan yang
memerlukan arus pull in yang besar dan untuk menghindari disipasi daya yang berlebihan dari peralatan yang akan dikontrol. PWM merupakan suatu metoda
lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan
periodik yang diberikan ke motor sebagai sumber daya. Semakin besar
perbandingan lama sinyal high dengan perioda sinyal maka semakin cepat motor
berputar.
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah
gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang
merupakan nilai rata-rata dari gelombang tersebut. Salah satu cara untuk dapat
memberikan tegangan masukan yang berbeda pada motor DC adalah dengan
menerapkan teknik Modulasi Lebar Pulsa ( Pulse Width Modulation , PWM ).
Secara umum PWM adalah sebuah cara memanipulasi lebar sinyal atau tegangan
yang dinyatakan dengan pulsa dalam suatu perioda, yang akan digunakan untuk
mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang
konstan untuk mendapatkan tegangan rata – rata yang berbeda. Penggunaan PWM sangat banyak, mulai dari pemodulasian data untuk telekomunikasi, pengontrollan
daya atau tegangan yang masuk ke beban, regulator tegangan , audio effect dan
penguatan, serta aplikasi – aplikasi lainnya.
Modulasi lebar pulsa dapat pula dikatakan sebagai cara memanipulasi
lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam satu perioda.
Modulasi lebar pulsa digunakan untuk mentransfer data pada telekomunikasi
ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan
rata-rata yang berbeda.
Cara lain membangkitkan sinyal PWM adalah dengan menggunakan rangkaian
mikrokontroler. Dengan menggunakan rangkaian mikrokontroler dapat dikirimkan
output ‘1’ dan ‘0’ sesuai dengan periode yang diinginkan melalui aplikasi
pewaktuan atau delay . Untuk mikrokontroler tertentu , seperti Atmega 8 , sudah
terdapat fungsi tertentu di dalamnya untuk membangkitkan sinyal PWM .
Sehingga , penggunaan PWM dalam rangka mengendalikan kecepatan motor DC
2.4.2 Prinsip Dasar PWM
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah
gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang
merupakan nilai rata-rata dari gelombang tersebut.
Modulasi lebar pulsa dapat pula dikatakan sebagai cara memanipulasi lebar sinyal
atau tegangan yang dinyatakan dengan pulsa dalam satu perioda. Modulasi lebar
pulsa digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur
tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang
berbeda.
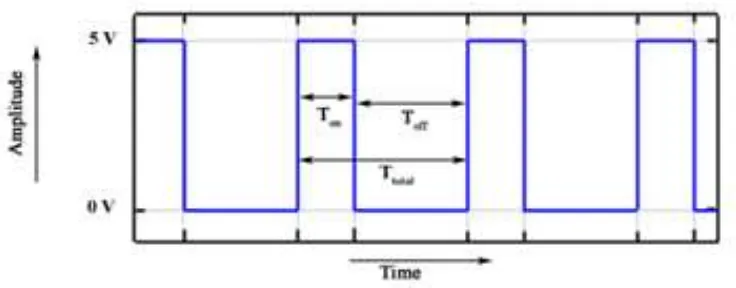
Gambar 2.7 Bentuk gelombang kotak (pulsa) dengan kondisi high 5V dan low 0V
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi (baca: high atau 1) dan,Toff adalah waktu dimana tegangan keluaran berada pada
posisi rendah (baca: low atau 0).Anggap Ttotal adalah waktu satu siklus atau
penjumlahan antara Ton dengan Toff , biasa dikenal dengan istilah “periode satu
gelombang”.
Ttotal = Ton + Toff ………. (2.1)
………... (2.2)
Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai berikut,
sehingga : ... (2.3)
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat
diubah-ubah secara langsung dengan mengubah
nilai Ton.Apabila Ton adalah 0, Vout juga akan 0.Apabila Ton adalah Ttotal maka Vo
ut adalah Vin atau katakanlah nilai maksimumnya.Dengan menghitung duty cycle
yang diberikan , akan didapat tegangan output yang dihasilkan.
...(2.4)
Average voltage merupakan tegangan output pada motor yang dikontrol oleh
sinyal PWM.Dengan menggunakan rumus di atas , maka akan didapatkan
tegangan output sesuai dengan sinyal kontrol PWM yang dibangkitkan. PWM
bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan
dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak
dan saat off menjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka
temperatur (suhu) air yang dikendalikan akan semakin sesuai dengan yang
diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari
sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah
sinyal tegangan dc yang
dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa
tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi
terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi
yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda
positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut.
Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi
timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
2.5 Motor Arus Searah
Motor DC dapat berfungsi sebagai motor apabila didalam motor listrik tersebut
terjadi proses konversi dari energy listrik menjadi energy mekanik. Motor DC itu
sendiri memerlukan suplai tegangan yang searah pada kumparan jangkar dan
kumparan medan untuk diubah menjadi energy mekanik. Pada motor dc kumparan
medan disebut stator (bagian yang tidakberputar) dan kumparan jangkar disebut
rotor (bagian yang berputar).
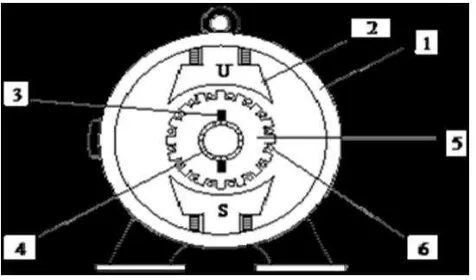
Gambar 2.9 Bagian – Bagian Motor DC
1.Badan Mesin
Badan mesin ini berfungsi sebagai tempat mengalirnya fluks magnet yang
dihasilkan kutub magnet, sehingga harus terbuat dari bahan ferromagnetik.Fungsi
bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar kuat,
seperti dari besi tuang dan plat campuran baja.
2.Inti kutub magnet dan belitan penguat magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan
arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet
dari kutub utara melalui celah udara yang melewati badan mesin.
3.Sikat-sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas,
dan juga memegang peranan penting untuk terjadinya proses komutasi.
4.Komutator
Komutator ini berfungsi sebagai penyearah mekanik yang akan dipakai
bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi
terjadi pada saat sisi kumparan berbeda.
5.Jangkar
Jangkar dibuat dari bahan ferromagnetic dengan maksud agar kumparan jangkar
terletak dalam daerah yang induksi magnetiknya besar, agar ggl induksi yang
dihasilkan dapat bertambah besar.
6.Belitan jangkar
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah,
berfungsi untuk tempat timbulnya tenaga putar motor.
2.5.1 Prinsip Kerja motor DC
Sebatang konduktor yang dialiri listrik dan ditempatkan di dalam suatu magnet
akan mengalami gaya yang sebanding dengan arus dan kekuatan medan
magnetnya. Gaya yang ditimbulkan dapat dirumuskan sebagai berikut:
dalam hal ini,
F = gaya medan magnet (N)
B = kerapatan fluks Magnet (webwer/m2)
I = arus listrik yang mengalir (ampere)
L = panjang kawat penghantar (meter)
Persamaan (2.5) merupakan prinsip dasar sebuah motor, dimana terjadinya proses
perubahan energi listrik (I) akan menimbulkan gaya mekanik (F). Jika motor
mempunyai jari-jari sebesar r, maka akan menimbulkan torsi sebesar :
T = F . r = B . I . L . r ………(2.6) Dalam hal ini,
T = torsi
F = gaya mekanik (newton)
Secara sederhana dikatakan bahwa motor listrik bekerja dengan prinsip bahwa dua
medan magnet dapat dibuat berinteraksi untuk menghasilkan gerakan. Tujuan
motor adalah untuk menghasilkan gaya yang menggerakkan ( torsi ). Motor arus
searah jarang digunakan pada aplikasi industry umum karena semua system utility
diperlengkapi dengan perkakas arus bolak-balik. Meskipun demikian , untuk
aplikasi khusus, adalah menguntungkan jika mengubah arus bolak-balik menjadi
arus searah dengan menggunakan motor dc. Motor arus searah digunakan dimana
control torsi dan kecepatan dengan rentang yang lebar diperlukan untuk
memenuhi kebutuhan aplikasi. Meskipun demikian, susunan sikat- komutator
menimbulkan masalah pada pemeliharaan sikat dan bunga api listrik.
Penyearah mengubah daya ac yang masuk menjadi daya dc dan
memberikan daya tersebut pada rngkaian inverter.Rangkaian inverter mengubah
kecepatan motor.Inverter disusun dari saklar elektronis yang mengatur daya dc
ON dan OFF menghasilkan output daya ac yang dapat dikontrol pada frekuensi dan tegangan yang diinginkan. Regulator memodifikasi inverter karakteristik
penghubungan sehingga frekuensi output dapat dikontrol .Inputnya termasuk
sensor yang mengukur variable control. Saat ini ada tiga jenis desain inverter
utama, yaitu inverter sumber arus, inverter tegangan variable, dan inverter lebar
pulsa termodulasi( inverter PWM). Inverter PWM meyempurnakan baik control
frekuensi maupun tegangan pada bagian output penggerak.Penyearah diode
menyediakan tegangan dc konstan. Karena inverter menerima tegangan tertentu ,
maka amplitude bentuk tegangan output selalu konstan.Inverter mengatur lebar
tegangan output sehingga hamper berbentuk sinus.
Makin baik bentuk gelombang , semakin sedikit penyaringan yang
diperlukan .Inverter PWM adalah yang paling rumit dan paling mahal dari tiga
jenis penggerak kecepatan variable ac lainnya. Penggerak PWM ada dari satu
sampai dengan 1000 hp.
2.6 Transistor sebagai Saklar Elektronik
Transistor daya memiliki karakteristik kontrol untuk menyala dan mati. Transistor
digunakan sebagai elemen saklar, dioperasikan dalam wilayah saturasi,
menghasilkan dalam drop tegangan kondisi-ON yang rendah. Kecepatan
pensaklaran transistor modern lebih tinggi daripada thyristor dan transistor
tersebut sering dipakai dalam konverter DC-DC dan DC-AC, dengan diode
terhubung paralel terbalik untuk menghasilkan aliran arus dua arah. Meskipun
begitu, tingkat tegangan dan arusnya lebih rendah daripada thyristor dan transistor
secara normal digunakan dalam aplikasi daya rendah sampai menengah.
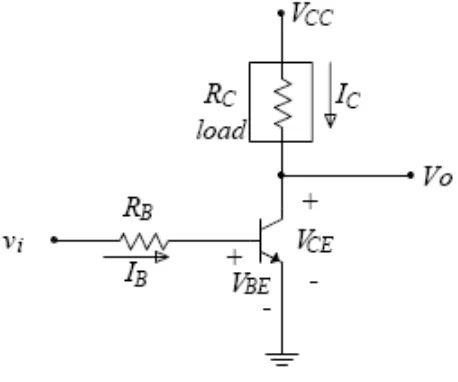
Untuk dapat memahami fungsi dasar Transistor sebagai saklar, maka dapat
diperhatikan sebuah rangkaian seperti yang tampak pada Gambar 2.10 di bawah
ini. Jika tegangan input, vi, memiliki harga kurang dari tegangan yang diperlukan
transistor akan jatuh pada Daerah Potong dan IC = 0. Karena IC = 0, maka
tegangan yang melintas tahanan beban RC adalah nol dan tegangan output VO =
Vcc. Pada kondisi ini, seolah-olah Transistor seperti sebuah saklar yang terputus (off).
Gambar 2.10 Rangkaian Transistor sebagai saklar
Jika tegangan input, vi, terus meningkat sehingga Dioda Emiter diberi prategangan
maju, Transistor akan mulai masuk ke daerah aktif, sehingga:
B
Sekali Transistor mulai aktif, belum diketahui apakah Transistor berada pada
Daerah Aktif atau berada pada Daerah Saturasi. Dengan menggunakan aturan
tegangan Kirchoff (KVL) pada putaran Dioda Kolektor, akan didapat:
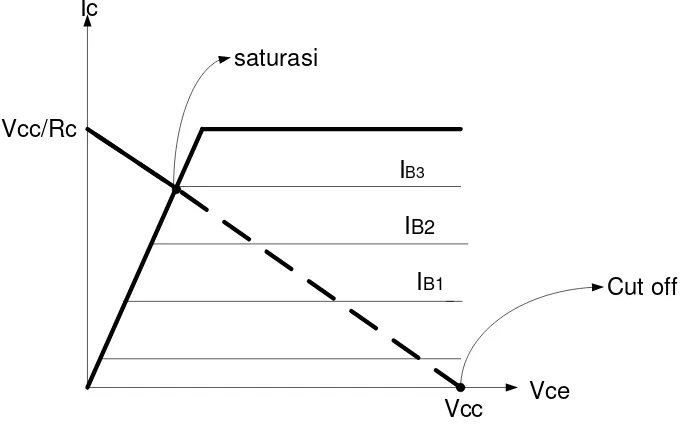
Persamaan (2.9) adalah persamaan Garis Beban Transistor. Dalam bentuk grafik,
garis ini diperlihatkan dalam Gambar 2.11.
Bersamaan dengan terus menaiknya arus Basis, IB, Transistor dapat
beroperasi sepanjang Garis Beban. Hal ini terus terjadi, sehingga arus Basis, IB,
mencapai harga arus yang terbesar, IB3. Arus ini dikenal dengan arus saturasi dan
jika Transistor beroperasi pada kondisi ini, maka dikatakan ia berada pada Daerah
Saturasi. Oleh karena itu, arus Kolektor adalah:
seperti sebuah saklar yang terhubung (on).
saturasi
Gambar 2.11 Garis Beban dan Titik Operasi Transistor
2.7 LCD ( Liquid Crystal Display)
LCD ( Liquid Crystal Display) adalah suatu jenis media tampilan yang
menggunakan Kristal cair sebagai penampil utama. Mikrokontroler sebagai chip
miniature dari system computer , tentunya membutuhkan media penampil output
layaknya sebuah monitor. Kita dapat mengkonfigurasi I/O dari chip mikro pada
kit rangkaian elektronik melalui berbagai bahasa pemrograman yang mampu
mengkompiler menjadi file berekstensi HEX agar dapat diflashing ke chip mikro.
LCD berfungsi menampilkan suatu nilai hasil sensor, menampilkan teks atau
menampilkan menu pada aplikasi mikrokontroler. LCD yang digunakan adalah
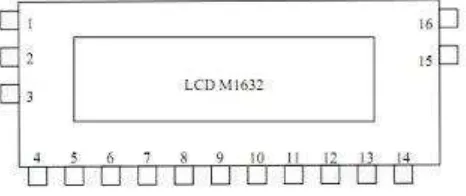
LCD M1632. LCD M1632 merupakan modul LCD dengan tampilan 16 x 2 baris
dengan konsumsi daya rendah.
Adapun fitur yang disajikan dalam LCD adalah :
a. Terdiri dari 16 karakter dan 2 baris
b. Mempunyai 192 karakter tersimpan
c. Terdapat karakter generator terprogram
d. Dapat dialamati dengan mode 4-bit dan 8-bit
e. Dilengkapi dengan blacklight
Modul ini dilengkapi dengan mikrokontroler yang didesain khusus untuk
mengendalikan LCD . Kegunaan LCD banyak sekali di dalam perancangan suatu
system dengan menggunakan mikrokontroler. LCD dapat berfungsi untuk
menampilkan nilai suatu sensor ,menapilkan teks, atau menampilkan menu pada
aplikasi mikrokontroler.
Urutan pin 1 biasanya dimulai dari sebelah kiri ( terletak di pojok kiri atas) dan
untuk LCD yang memiliki 16 pin ,2 pin terakhir adalah anoda dan katoda untuk
backlighting.
Tabel 2.1. Tabel fungsi pin LCD M1632
No. Simbol Level Fungsi
1 Vss -
Power Supply
0V (GND)
2 Vcc - 5V ± 10%
3 Vcc - LCD Drive
4 RS H/L H: Data In L: Instrustion In
5 R/W H/L H: Read L: Write
6 E H,↓ Sinyal Enable
7 DB0 H/L
Data Bus
8 DB1 H/L
9 DB2 H/L
10 DB3 H/L
11 DB4 H/L
12 DB5 H/L
13 DB6 H/L
14 DB7 H/L
15 V+BL - Back light Supply 4-4,2V 50-200mA
16 V-BL - 0V (GND)
Sebagaimana terlihat pada kolom di atas,Interface LCD merupakan sebuah
parallel bus,dimana hal ini sangat memudahkan dan sangat cepat dalam
pembacaan dan penulisan data dari atau ke LCD.Mode 8 bit sangat baik
digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan
setidaknya minimal tersedia 11 pin I/O. Aplikasi dengan LCD dapat dibuat
dengan mudah dan waktu yang singkat, mengingat koneksi parallel yang cukup
mudah antara controller dan LCD. Gambar berikut adalah contoh LCD ( 2 x 16 )
yang umum digunakan :