SISTEM PENGENDALIAN POSISI MODEL PANEL SURYA
BERBASIS MIKROKONTROLER ATMega8535
ABSTRAK
Oleh
Agus Susanto
Pada penelitian tugas akhir telah dilakukan perancangan dan realisasi model panel surya dengan suatu sistem yang mampu mendapatkan posisi ideal sehingga nantinya diperoleh sistem yang lebih baik dari sebelumnya. Menggunakan bahan kaca akrilik untuk model panel surya yang terhubung dengan dc motor servo, memasukkan input dari keypad 4x4 untuk mendapatkan posisi yang diinginkan dan menampilkan pada LCD 2x16 karakter besar sudut yang dicapai.
Hasil yang diperoleh dalam tugas akhir ini adalah posisi sudut dari model panel surya dengan cara memasukkan atau menekan tombol keypad, dc motor servo akan bergerak ke posisi sudut sesuai dengan pemrograman pada mikrokontroler ATMega8535, begitu juga dengan tampilan LCD sesuai dengan program pada mikrokontroler.
Perangkat sistem menggunakan model panel surya dengan desain yang dapat bergerak untuk mendapatkan posisi yang diinginkan, yaitu ke posisi sudut 300, 450, 600, 750, 900, 1050, 1200, 1350 dan 1500. Dari hasil yang diperoleh didapatkan kesimpulan yaitu untuk mendapatkan sudut posisi yang diinginkan, model panel surya diposisikan ke posisi mula yaitu pada sudut 1500 dengan pendekatan nilai ADC ~ 22. Setelah itu, dengan cara menekan tombol 1 – 8 akan diperoleh sudut-sudut 300– 1350.
POSITION CONTROL SYSTEM FOR SOLAR PANEL MODEL
BASED ATMega8535 MICROCONTROLLER
ABSTRACT
By
Agus Susanto
In this research the design and realization a model of solar panels with a system that is able to get the ideal position so that later obtained a better than old system. Using acrylic glass materials for solar panel models that are connected with the dc servo motor, inserting input from the keypad 4x4 to get the desired position and 2x16 character LCD display on a large angle is reached.
Results obtained in this research is the angular position solar panel model by entering of input or pressing the keypad keys, dc servo motor will move to an angular position in accordance with ATMega8535 microcontroller programming, as well as the LCD display in accordance with the program on the microcontroller. Device model using a solar panel system with a design that can be engaged to obtain the desired position, to the angular position 300, 450, 600, 750, 900, 1050, 1200, 1350 and 1500. From the results obtained it was concluded that to obtain the desired angle position, the model solar panel that is positioned to the first position at an angle of approach in 1500 with ADC values ~ 22. After that, by pressing the 1-8 will get the angles 300-1350.
I. PENDAHULUAN
A. Latar Belakang
Kondisi bumi kita kian lama kian mengenaskan karena tercemarnya lingkungan dari efek rumah kaca (green house effect) yang menyebabkan global warming, hujan asam, rusaknya lapisan ozon, hingga hilangnya hutan tropis. Semua jenis polusi itu rata-rata akibat dari penggunaan bahan bakar fosil seperti minyak bumi, uranium, plutonium, batu bara dan lainnya yang tiada hentinya. Padahal kita tahu bahwa bahan bakar dari fosil tidak dapat diperbaharui, tidak seperti bahan bakar non-fosil.
Dengan kondisi yang sudah sedemikian memprihatinkan gerakan hemat energi sudah merupakan keharusan di seluruh dunia. Salah satunya dengan hemat bahan bakar dari non-fosil yang dapat diperbaharui seperti tenaga angin, tenaga air, energi panas bumi, tenaga surya dan lainnya. Duniapun sudah merubah tren produksi dan penggunaan bahan bakarnya dari bahan bakar fosil beralih ke bahan bakar non-fosil terutama tenaga surya yang tidak terbatas.
Untuk mendapatkan energi listrik yang optimal, sistem panel surya itu masih harus dilengkapi pula dengan rangkaian controller optional untuk mengatur arah permukaan panel surya agar selalu menghadap surya sedemikian rupa sehingga sinar surya jatuh hampir tegak lurus pada panel surya. (Hermansyah, 2008)
B. Rumusan Masalah
Perolehan energi listrik menggunakan panel surya agar lebih optimal salah satunya ditentukan dengan kemiringan sudut penerimaan sinar langsung dari surya. Pasokan energi akan lebih optimal jika datangnya sinar surya tegak lurus dengan panel surya. Karena penerimaan sinar yang langsung tegak lurus dengan surya, akan meningkatkan jumlah intensitas sinar yang jatuh pada panel surya. Sehingga pada akhirnya akan meningkatkan nilai energi listrik yang dihasilkan oleh panel surya tersebut.
Model panel surya digerakkan oleh sistem dc motor servo continous yang akan bergerak sesuai dengan sudut kemiringan yang diinginkan, sudut kemiringan model panel surya akan bergerak sesuai masukan dari keypad, hal tersebut karena sistem pengendalian ini dilakukan secara manual.
C. Batasan Masalah
Hal-hal yang dilakukan dalam tugas akhir ini dibatasi pada masalah:
1. Pemodelan sistem pengendalian panel surya berdasarkan masukan keypad
sesuai kemiringan sudut rotasi bumi.
2. Perancangan sistem elektronik dan mekanik model sistem pengendalian panel surya secara keseluruhan.
3. Tidak membahas pengukuran energi yang diperoleh dari sistem pengendalian yang telah dibuat.
D. Tujuan Penelitian
Penulisan tugas akhir ini bertujuan untuk:
1. Mengatur model sistem panel surya agar mendapatkan sudut yang optimal dan efektif dalam perolehan energi listrik.
2. Pengendali model panel surya dikendalikan dengan Mikrokontroler ATMega8535.
E. Manfaaat Penelitian
Manfaat yang didapat dari penulisan tugas akhir ini adalah:
1. Sebagai bahan penunjang untuk diaplikasikan pada instrumentasi dalam meningkatkan perolehan energi listrik menggunakan panel surya.
F. Hipotesis
Hipotesis dari penelitian tugas akhir ini diharapkan model sistem panel surya yang menggunakan bahan kaca akrilik dapat bekerja manual sesuai dengan pengendali mikro. Model kaca akrilik sebagai simulasi panel surya akan bergerak untuk mencapai sudut ideal. Masukan akan dimasukkan melalui keypad 4x4 dan ditampilkan ke LCD 2x16 karakter.
G. Sistematika Penulisan
Sistematika penulisan tugas akhir ini terdiri dari beberapa bab, yaitu: BAB I PENDAHULUAN
Bab ini menguraikan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, hipotesis dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini berisi mengenai teori-teori yang menunjang penulisan tugas akhir, yaitu mengenai panel surya, mikrokontroler ATMega8535, motor dc servo continous,
Liquid Crystal Display (LCD), keypad dan potensiometer.
BAB III METODE PENELITIAN
Memuat langkah-langkah yang dilakukan pada penelitian ini diantaranya waktu dan tempat penelitian, alat dan bahan, dan prosedur alur penelitian,
BAB IV HASIL DAN PEMBAHASAN
BAB V SIMPULAN DAN SARAN
Bab ini berisi tentang kesimpulan dari tugas akhir yang telah dibuat dan juga saran-saran yang sekiranya diperlukan untuk menyempurnakan tugas akhir.
DAFTAR PUSTAKA
II. TINJAUAN PUSTAKA
A. Sejarah Panel Surya
Sejarah perkembangan industri Photovoltaic (PV) telah berjalan sekitar 50 tahun, dan telah banyak pula penelitian dilakukan dengan harapan suatu saat dapat menghasilkan panel surya yang murah dan layak dibandingkan dengan tenaga listrik buatan (hidro atau nuklir) untuk memecahkan masalah kebutuhan tenaga listrik yang ramah terhadap lingkungan hidup diseluruh lapisan dunia ini.
Pada sekitar akhir abad 19, aliran listrik surya diketemukan oleh ahli fisika Jerman bernama Alexandre Edmond Becquerel secara kebetulan dimana berkas cahaya surya jatuh pada larutan elektro kimia bahan penelitian, sehingga muatan elektron pada larutan meningkat, tidak ada penjelasan ilmiah pada peristiwa tersebut. Baru pada awal abad 20, Albert Einstein menamakan penemuan peristiwa listrik alami ini dengan sebutan photoelectric effect, yang kemudian merupakan pengertian dasar pada photovoltaic effect (Albert Einstein mendapat Nobel Prize Fisika).
Photoelectric Effect didapat dari pengamatan Einstein pada sebuah lempeng metal yang melepaskan foton partikel energi cahaya ketika terkena cahaya surya. Foton-foton terus menerus mendesak atom-atom metal dan terjadi partikel Energi Foton bersifat gelombang energi cahaya.
bermuatan energi foton rendah dan dalam bentuk gelombang panjang. Kemudian sekitar tahun 1930, penelitian berlanjut dan berhubungan dengan penemuan konsep Quantum Mechanics untuk menciptakan teknologi baru dimana kemudian perusahaan Bell Telephone Research Laboratories menciptakan panel surya padat yang pertama. Tahun 1950 - 1960, teknologi disain dan efisiensi panel surya terus berlanjut dan di aplikasikan ke pesawat ruang angkasa. Tahun 1970-an, dunia menggalakkan sumber energi alternatif yang terbarukan dan ramah lingkungan, maka PV mulai diaplikasikan ke sistem peringatan daya rendah (low power warning systems) tetapi produksi PV tidak dapat banyak karena masih handmade.
Baru pada tahun 1980-an, perusahaan-perusahaan PV bergabung dengan instansi energi pemerintah agar dapat lebih memproduksi PV panel dalam jumlah besar, sehingga harga per panel-surya dapat lebih ditekan serendah mungkin. (Hermansyah, 2008)
B. Energi Surya
1. Dasar Panel Surya
2. Perkembangan Panel Surya
Pengembangan panel surya semakin banyak menggunakan bahan semikonduktor yang bervariasi dan silikon yang secara individu (chip) banyak digunakan diantaranya :
a. Mono-crystalline
Dibuat dari silikon kristal tunggal yang didapat dari peleburan silikon dalam bentuk bujur. Sekarang Mono-crystalline dapat dibuat setebal 200 mikron dengan nilai efisiensi sekitar 24%.
b. Polycrystalline/Multi-crystalline
Dibuat dari peleburan silikon dalam tungku keramik, kemudian pendinginan perlahan untuk mendapatkan bahan campuran silikon yang akan timbul diatas lapisan silikon. Panel ini kurang efektif dibanding dengan panel Monocrystalline
(efektivitas 18%), tetapi biaya lebih murah.
c. Gallium Arsenide (GaAs)
Panel surya Galium Arsenide pada unsur periodik III-V berbahan semikonduktor ini sangat efisien dan efektif dalam menghasilkan energi listrik sekitar 25%. Banyak digunakan pada aplikasi pemakaian panel surya.
3. Energi Listrik
konstan akan menghasilkan energi berkisar ± 0.5 V maksimum 600 mV, dengan kekuatan radiasi surya 1000 W/m2 = ”1 Sun” akan menghasilkan arus listrik (I) sekitar 30 mA/cm2 per panel surya.
Pada grafik I-V Curve (gambar 2.1) yang menggambarkan keadaan sebuah panel surya beroperasi secara normal. Panel surya akan menghasilkan energi maksimum jika nilai Vm dan Im juga maksimum. Sedangkan Isc adalah arus listrik maksimum
pada nilai volt = nol; Isc berbanding langsung dengan tersedianya sinar surya. Voc
adalah volt maksimum pada nilai arus nol; Voc naik secara logaritma dengan
peningkatan sinar surya, karakteristik ini yang memungkinkan panel surya untuk mengisi accu.
Gambar 2.1. Kurva karakteristik I – V
(Hermansyah, 2008)
wilayah khatulistiwa mempunyai potensi energi surya yang cukup besar sepanjang tahunnya.
Selain menjadi sumber energi bagi sumber energi lainnya, energi surya sangat berpotensi untuk dimanfaatkan secara langsung sebagai sumber energi alternatif. Pemanfaatan energi surya ini dapat dilakukan secara termal maupun melalui energi listrik. Pemanfaatan secara termal dapat dilakukan secara langsung dengan membiarkan objek pada radiasi surya, atau menggunakan peralatan yang mencakup panel surya.
Berikut intensitas cahaya surya per hari :
Tabel 2.1. Intensitas Cahaya Surya per hari
Waktu Watt-jam/m2
06.00 – 07.00 25 07.00 – 08.00 25 08.00 – 09.00 50 09.00 – 10.00 300 10.00 – 11.00 1000 11.00 – 12.00 1200 12.00 – 13.00 1000 13.00 – 14.00 300 14.00 – 15.00 50 15.00 – 16.00 25 16.00 – 17.00 25 17.00 – 18.00 0
C. Mikrokontroler ATMega8535
Mikrokontroler yang digunakan sebagai pengendali utama sistem model panel surya adalah 8 bit mikrokontroler dari keluarga AVR, yaitu ATMega8535. Alasan penggunaan mikrokontroler ini adalah karena harga yang relatif murah, mudah diperoleh, kemudahan dalam pemrograman, dan fitur-fitur menarik yang dimilikinya.
Mikrokontroller AVR memiliki arsitektur Reduced Instruction Set Computing
(RISC) 8 Bit, sehingga semua instruksi dikemas dalam kode 16-bit (16-bitsword) dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. Dan ini sangat membedakan sekali dengan instruksi MCS-51 yang berarsitektur Complex Instruction Set Computing (CISC) yang membutuhkan siklus 12 clock.
AVR dikelompokkan kedalam 4 kelas, yaitu ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT86RFxx. Dari kesemua kelas yang membedakan satu sama lain adalah ukuran onboard memori, on-board peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan mereka bisa dikatakan hampir sama.
1. Arsitektur Mikrokontroler ATMega8535
Arsitektur dari mikrokontroler ATMega8535 yaitu :
a. Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D b. ADC 10 bit sebanyak 8 Channel
c. Tiga buah timer / counter
e. Watchdog Timer dengan oscilator internal f. SRAM sebanyak 512 byte
g. Memori Flash sebesar 8 kb
h. Sumber Interrupt internal dan eksternal i. PortSerial Pheriperal Interface (SPI) j. EEPROM on board sebanyak 512 byte k. Komparator analog
l. PortUniversal Shynchronous Ashynchronous Receiver Transmitter (USART)
2. Fitur Mikrokontroler ATMega8535
Fitur-fitur dari mikrokontroler ATMega8535 yaitu :
a. Sistem processor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz b. Ukuran memori flash 8 KB, SRAM sebesar 512 byte, EEPROM sebesar 512
byte
c. ADC internal dengan resolusi 10 bit sebanyak 8 channel
d. Port komunikasi serial USART dengan kecepatan maksimal 2.5 Mbps e. Mode Sleep untuk penghematan penggunaan daya listrik
3. Konfigurasi PIN ATMega8535
Konfigurasi dari mikrokontroler ATMega8535 yaitu :
a. VCC merupakan Pin yang berfungsi sebagai pin masukan catudaya b. GND merupakan Pin Ground
d. Port B (PB0...PB7) merupakan pin I/O dan pin yang mempunyai fungsi khusus yaitu Timer/Counter, komparator Analog dan SPI
e. Port C (PC0...PC7) merupakan port I/O dan pin yang mempunyai fungsi khusus, yaitu komparator analog dan Timer Oscillator
f. Port D (PD0...PD7) merupakan port I/O dan pin fungsi khusus yaitu komparator analog dan interrupt eksternal serta komunikasi serial
g. RESET merupakan pin yang digunakan untuk mereset mikrokontroler h. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal
i. AVCC merupakan pin masukan untuk tegangan ADC
j. AREF merupakan pin masukan tegangan referensi untuk ADC
Gambar 2.3. DT AVR Low Cost System
ATMega8535 memiliki empat buah port (terminal) masukan/keluaran yaitu Port
A, Port B, Port C, dan Port D. Port A selain berfungsi sebagai port I/O digital, pin-pinnya juga dapat difungsikan sebagai saluran masukan sinyal analog yang akan diubah menjadi sinyal digital oleh ADC internal. Port B terdapat pada pin nomor 1 hingga 8. Selain sebagai pin I/O digital biasa, pin-pin yang ada port B juga memiliki fungsi khusus.
Pin PB0 dan PB1 memiliki fungsi lain yaitu sebagai masukan sinyal clock
eksternal untuk timer/counter 0dan1. Pin PB5 (MOSI), PB6 (MISO), dan PB7(SCK) memiliki fungsi lain sebagai sebagai saluran untuk sinyal in sistem programming (ISP).
Port D terdapat pada pin nomor 14 hingga 21. Selain berfungsi sebagai pin I/O digital biasa, pin-pin yang terdapat pada port D juga memiliki fungsi khusus. Pin PD2 (INT0) dan PD3 (INT1) berfungsi sebagai masukan untuk sinyal interrupt
(OC2) juga berfungsi sebagai pin untuk keluaran sinyal clock/Pulse Width Modulation (PWM) yang dihasilkan oleh timer 2 yang ada di dalam mikrokontroler. Pin RESET merupakan pin aktif rendah untuk mereset mikrokontroler. Dalam keadaan reset, alur program akan kembali ke alamat 0x0. Pin VCC dan GND adalah pin yang digunakan untuk penyedia tegangan mikrokontroler. Beda tegangan yang dapat diberikan berkisar antara 4,5–5,5 V.
4. Peta Memori Mikrokontroler ATMega8535
Mikrokontroler ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu : 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM internal.
Gambar 2.4. Memori Data AVR ATMega8535
Gambar 2.5. Memori Program AVR ATMega8535
Selain itu AVR ATMega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
5. Status Register
Gambar 2.6. Status Register ATMega8535
1. Bit7 --> I (Global Interrupt Enable), Bit harus di Set untuk mengenable semua jenis interupsi.
2. Bit6 --> T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bit5 --> H (Half Cary Flag)
4. Bit4 --> S (Sign Bit) merupakan hasil operasi EOR antara flag -N (negatif) dan
flag V (komplemen dua overflow).
5. Bit3 --> V (Two's Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
6. Bit2 --> N (Negative Flag) Flag N akan menjadi Set, jika suatu operasi matematis menghasilkan bilangan negatif.
7. Bit1 --> Z (Zero Flag) Bit ini akan menjadi Set apabila hasil operasi matematis menghasilkan bilangan 0.
8. Bit0 --> C (Cary Flag) Bit ini akan menjadi set apabila suatu operasi menghasilkan carry.
D. DC Motor Servo Continous
Motor servo merupakan sebuah motor dc kecil yang diberi sistem gear dan potensiometer sehingga dapat menempatkan horn servo pada posisi yang dikehendaki. Motor servo ini jelas menggunakan sistem close loop sehingga posisi horn yang dikehendaki bisa dipertahanakan. Horn pada servo ada dua jenis, yaitu horn X (seperti pada gambar 2.7) dan horn berbentuk bulat.
Secara umum terdapat 2 jenis motor servo. Yaitu motor servo standar dan motor servo continous. Motor servo standar sering dipakai pada sistem robotika misalnya untuk membuat Robot Arm (Robot Lengan) sedangkan motor servo
continous sering dipakai untuk Mobile Robot. Pada badan servo tertulis tipe servo yang bersangkutan.
Gambar 2.7. Servo Parallax
kontrol untuk motor servo relatif sedikit (diperlukan hanya 1 jalur data saja). Hal ini tentu berbeda misalnya jika kita menggunakan motor stepper yang memerlukan jalur kontrol lebih dari 1 jalur. Untuk mengontrol motor servo, maka digunakan teknik PWM.
Gambar 2.8. Hubungan lebar pulsa dengan posisi horn servo
E. Keypad 4x4 dan LCD
1. Keypad 4x4
Angka hexa pada keypad hanya untuk ilustrasi. Tekanan pada keypad dapat diterjemahkan sebagai perintah apapun, tergantung program yang dimasukkan ke mikrokontroler.
Gambar 2.9. Keypad
Dasar Pemindaian Keypad 4X4
1. Pada kondisi awal, tidak ada penekanan, P1.0 s.d. P1.3 (kolom 0 s.d. 3) sebagai masukan bernilai logika ‘1’ (karena ditarik ke VCC dan instruksi), sedangkan P1.4 s.d. P1.7 (baris 0 s.d. 3) sebagai keluaran bernilai logika
2. Bila terjadi salah satu tombol ditekan, salah satu dari kolom 0 - 3 akan
menjadi ‘0’.
3. Koordinat tombol yang ditekan dicari dengan cara pemindaian:
a. Semua P1 di-’1'-kan.
b. Baris 0 di-’0'-kan, sedangkan baris 1 - 3 di-‘1’-kan.
c. Kolom 0 - 1 diamati, bila salah satunya menjadi ‘0’ maka rutin selesai.
d. Langkah (b) dan (c) diterapkan secara bergilir untuk baris 1 - 3.(c) Isi P1 saat terjadi ‘0’ di salah satu kolom dicatat.
4. Isi P1 diterjemahkan sesuai tabel keinginan programmer. Catatan: Langkah (3)berlangsung sangat cepat saat tombol keypad masih ditekan.
5. Debouncing: Waktu yang diperlukan manusia saat menekan keypad
mencapai ratusan milidetik. Untuk menghindarkan deteksi palsu karena lonjakan tegangan listrik sejenak, semacam delay dimasukkan ke dalam rutin pemindaian. Delay ini biasanya sekitar 30ms. Bila setelah delay
masih terdeteksi adanya penekanan, maka penekanan dianggap sahih.
6. Pola byte dari P1 (hanya satu ‘0’ di tiap nibble): EEh, Edh, Ebh, E7h, Deh, DDh, DBh, D7h, Beh, BDh, BBh, B7h, 7Eh, 7Dh, 7Bh, 77h.
2.Liquid Crystal Display (LCD)
LCD berfungsi sebagai salah satu alat komunikasi mikrokontroler dengan manusia dalam bentuk tulisan/gambar. Kapasitas tampilan LCD di pasaran biasanya adalah: 2/4 baris x 16/20 karakter. Tiap karakter biasanya tersusun dari 5x8 pixel. Sehingga total perkabelan untuk LCD 2x16 adalah 5 x 8 x 2 x 16. Kerumitan pengkabelan ini berkurang karena biasanya LCD dijual berupa modul yang dilengkapi drivernya, sehingga kaki yang perlu diatur hanya 8 (data) + 6 (kontrol).
Gambar 2.10. Liquid Crystal Display (LCD)
Vdd, Vss: Power supply
Vo: pengatur kontras pixel
Vdd, Vss, & Vo tidak perlu terhubung ke kontroler.
R/W (1/0): Baca/ Tulis, biasanya selalu tulis. Jadi pin ini biasanya ke ‘0’.
DB0-7: jalur data, data dapat berupa karakter yang hendak ditampilkan, dapat juga berupa pengaturan tampilan LCD.
RS (Registration Select):
-Bila ‘0’, Instruction Register menjadi tujuan data DB0-7 (diperlakukan sebagai perintah: clear screen, pilih lokasi kursor, dll.)
-Bila ‘1’, Data Register menjadi tujuan data DB0-7 dan ditampilkan ke LCD.
(Sumber : http://www.8052.com/tutlcd.phtml. 2005)
F.Potensiometer
Potensiometer yang tersedia di pasaran terdiri dari beberapa jenis, yaitu: potensiometer karbon, potensiometer wire wound dan potensiometer metal film.
1. Potensiometer karbon adalah potensiometer yang terbuat dari bahan karbon harganya cukup murah akan tetapi kepresisian potensiometer ini sangat rendah biasanya harga resistansi akan sangat mudah berubah akibat pergeseran kontak.
2. Potensiometer gulungan kawat (wire wound) adalah potensiometer yang menggunakan gulungan kawat nikelin yang sangat kecil ukuran penampangnya. Ketelitian dari potensiometer jenis ini tergantung dari ukuran kawat yang digunakan serta kerapihan penggulungannya.
Gambar 2.11. Potensiometer
Potensiometer adalah komponen tiga terminal resistor geser dengan kontak yang menyesuaikan suatu bentuk tegangan pembatas. Jika hanya dua terminal yang digunakan (satu sisi dan penghapus), ia bertindak sebagai variabel penghambat atau Rheostat. Potensiometer yang umumnya digunakan untuk mengontrol perangkat listrik seperti kontrol volume dari radio. Potensiometer dioperasikan oleh mekanisme yang dapat digunakan sebagai posisi transduser, misalnya, dalam sebuah joystick. Konstruksi dari kawat-luka circular potensiometer, yang dapat melawan elemen yang ditampilkan adalah perangkat trapezoidal, memberikan non-linear hubungan antara perlawanan dan berbelok sudut, berputar dengan poros, memberikan perlawanan yang berubah-ubah antara wiper kontak.
Potensiometer kadang-kadang diberikan dengan satu atau lebih switch terpasang pada batang yang sama. Misalnya, ketika terpasang ke kontrol volume, tombol yang dapat juga berfungsi sebagai on/off beralih pada volume terrendah.
III. METODE PENELITIAN
A. Waktu dan Tempat Penelitian
1. Waktu
Februari 2010 – Juni 2010 2. Tempat
Laboratorium Teknik Kendali, Teknik Elektro Universitas Lampung
B. Alat dan Bahan
Peralatan yang digunakan dalam pembuatan terdiri atas: a. Akrilik
b. Dc motor servo continous
c. Mikrokontroler ATMega8535 d. Keypad 4x4
e. LCD 2x16
C. Spesifikasi Alat
Spesifikasi dari alat yang digunakan: 1. Akrilik
merk dagang Plexiglas, Vitroflex, Perspex, Limacryl, Acrylite, Acrylplast, Altuglas, dan Lucite serta pada umumnya disebut dengan kaca akrilik atau sekedar akrilik.
2. Dc motor servo continous
Dc motor servo tipe continous dengan tiga kabel terhubung, dua kabel merupakan
ground dan Vdc 5 V, dan satu kabel ke mikrokontroler.
3. Mikrokontroler ATMega8535 a. Resolusi data 8 bit
b. RISC arsitektur
c. 8 kByte In System Programmable Flash
d. 512 Bytes EEPROM e. 512 Bytes SRAM internal f. 8 channel, 10 bit resolusi ADC g. 4 channel PWM
h. 2 timer/counter 8 bit i. 1 timer/counter 16 bit
j. Osilator internal yang dikalibrasi k. Internal dan eksternal sumber interrupt
4. Keypad 4x4
5. LCD 2x16 karakter
LCD dengan 16 pin, pin 1 – 2 sebagai ground dan Vs 5 V begitu juga dengan
pin 16 dan 15, pin nomor 3 terhubung ke potensiometer sebagai pengatur kontras tampilan.
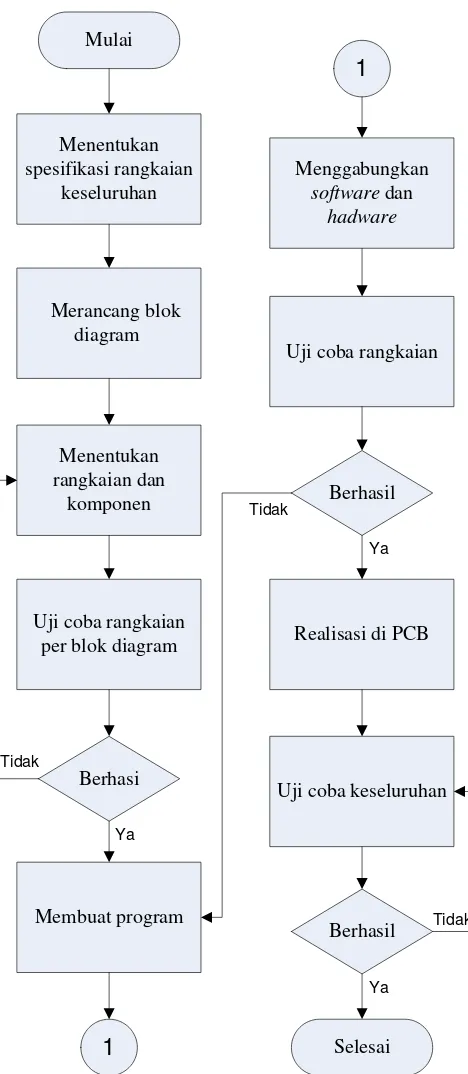
D. Tahap - Tahap Dalam Perancangan Tugas Akhir
1. Perancangan blok diagram sistem
Perancangan blok diagram ini dilakukan dengan tujuan untuk mempermudah realisasi sistem yang akan dibuat.
2. Implementasi rangkaian, dengan tahap-tahap sebagai berikut: a. Memilih rangkaian dari masing-masing blok diagram. b. Menentukan komponen yang digunakan dalam rangkaian.
c. Merangkai dan uji coba rangkaian dari masing-masing blok diagram. d. Menggabungkan rangkaian dari setiap blok dalam papan percobaan
(project board) dan dilakukan uji coba.
e. Membuat program dan kemudian memasukkan program (download)yang telah dibuat ke dalam mikrokontroler.
f. Merangkai komponen dalam PCB. 3. Pengujian alat
Pengujian alat dilakukan untuk mengetahui tingkat keberhasilan alat yang dibuat.
Mulai
Kontroler Motor DC
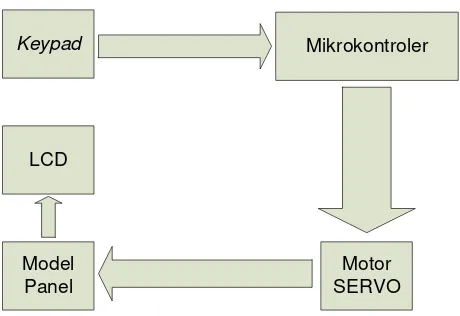
Gambar 3.2 di bawah ini adalah blok diagram secara umum sistem pengendalian posisi model panel surya berbasis mikrokontroler ATMega8535.
Gambar 3.2 Blok diagram sistem pengendalian posisi model panel surya
Dari blok diagram sistem kendali di atas dapat dijelaskan bahwa masukan dari
keypad yang diberikan akan dikendalikan oleh pengendali, selanjutnya pengendali akan mengatur motor dc servo continous untuk menggerakkan model panel surya ke posisi yang diinginkan. Keluaran dari sistem ini adalah posisi model panel surya. Pada sistem kendali ini tidak terdapat feed back (umpan balik), sehingga sistem pengendalian ini disebut juga sebagai sistem kendali loop terbuka.
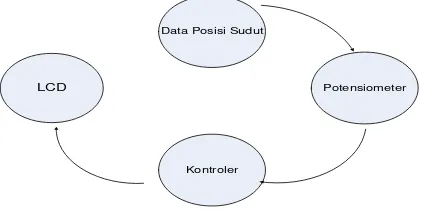
Gambar 3.3. Perancangan Sistem Sensor Potensiometer
Keypad
Motor SERVO Mikrokontroler
Model Panel LCD
Gambar 3.4. Blok diagram perancangan sistem pengendalian posisi model panel surya
Perancangan sistem dapat dijelaskan bahwa pada sistem pengendalian model panel surya dibutuhkan seorang operator untuk mengoperasikan sistem ini, melalui keypad, yang terhubung secara serial ke mikrokontroler. Keypad akan memberikan masukan ke mikrokontroler berupa perintah untuk menjalankan servo motor sehingga motor mampu menggerakkan model panel surya. Perintah yang diberikan kemudian akan dikendalikan oleh pengendali, dalam hal ini mikrokontroler ATMega8535. Untuk pergerakkan model panel surya, mikrokontroler akan memberikan perintah untuk menjalankan motor. Dengan demikian dapat diperoleh posisi ideal model panel surya dan posisi sudut akan ditampilkan melalui LCD.
Gerak semu surya memperlihatkan pergeseran surya ke arah utara dan selatan, namun pergeseran gerak ke utara dan ke selatan ini kecil sehingga dapat diabaikan. Pada bulan Maret dan September surya cenderung berada di garis khatulistiwa, pada bulan Juni surya cenderung bergeser ke utara, sedangkan pada bulan Desember surya cenderung bergeser ke selatan. Kecenderungan pergeseran semu surya ini mengakibatakan sudut kemiringan yaitu maksimal 23,50 ke masing-masing arah yaitu utara dan selatan didasarkan pada garis khayal khatulistiwa.
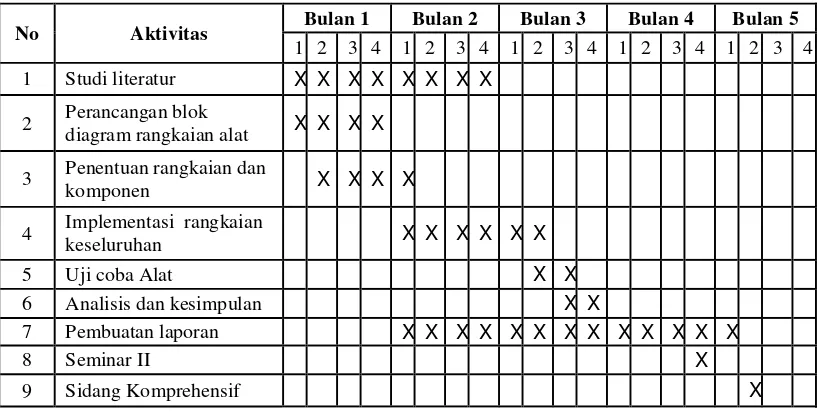
Tabel 3.1. Jadual dan Aktivitas Tugas Akhir
No Aktivitas Bulan 1 Bulan 2 Bulan 3 Bulan 4 Bulan 5
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1 Studi literatur X X X X X X X X
2 Perancangan blok
diagram rangkaian alat X X X X
3 Penentuan rangkaian dan
komponen X X X X
4 Implementasi rangkaian
keseluruhan X X X X X X
5 Uji coba Alat X X
6 Analisis dan kesimpulan X X
7 Pembuatan laporan X X X X X X X X X X X X X
8 Seminar II X
IV. HASIL DAN PEMBAHASAN
A. Perencanaan Dan Pembuatan Perangkat Keras Dan Perangkat Lunak
1. Sistem Mekanik
Sistem Pengendalian Posisi Model Panel Surya Berbasis Mikrokontroler ATMega8535 memiliki suatu perancangan sistem mekanik berupa sebuah sistem dudukan model sistem panel surya dengan kaca akrilik sebagai model panel surya. Sistem sendiri diletakkan secara simetris searah pasisi barat, timur, utara, dan selatan hal ini disebabkan karena sistem pergerakkan model panel surya terbatas pada gerakan kanan kiri yang dapat diasumsilan sebagai gerak ke barat timur.
Perangkat sistem mekanik terdiri dari dudukan model panel surya berupa bangunan terbuat dari bahan kayu dan kaca akrilik. Semuanya terintegrasi sebagai suatu kesatuan sistem.
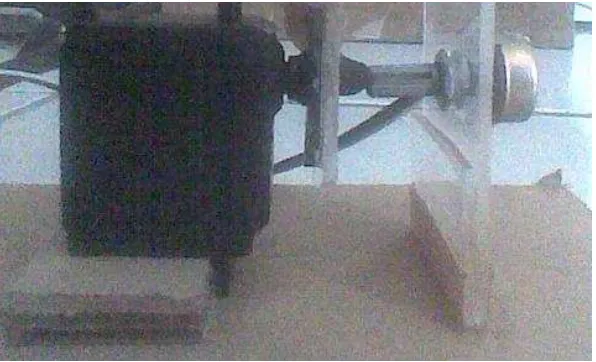
Berikut sistem kerja dari Sistem Mekanik Pengendalian Posisi Model Panel Surya Berbasis Mikrokontroler ATMega8535, sebagai poros gerak utama arah timur-barat (horizontal) terhubung dengan poros motor servo. Selain terhubung dengan model panel surya poros motor juga terhubung dengan potensiometer sebagai sensor. Gerak yang dihasilkan akan menghasilkan perubahan sudut poros motor yang sebanding juga dengan sudut dari potensiometer.
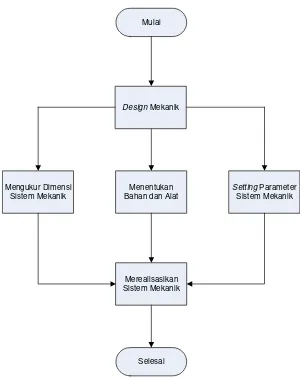
Mulai
Selesai Menentukan Bahan dan Alat
Setting Parameter
Sistem Mekanik Mengukur Dimensi
Sistem Mekanik
Merealisasikan Sistem Mekanik
Design Mekanik
Gambar 4.1. Diagram Alir Sistem Mekanik
Sistem mekanik ini terdiri dari 3 bagian :
a. Sistem Model Panel Surya
Panjang : 11 cm Lebar : 7,5 cm
Tinggi kaki : 10 cm
Gambar 4.2. Model panel surya
b. Dudukan sistem gerak
Terhubung dengan poros motor servo sehingga sudut posisi yang diinginkan sesuai dengan perubahan sudut servo. Motor servo sendiri terletak di atas sistem dudukan kaca akrilik berbentuk kotak persegi panjang terletak diatas bangunan mekanik dari kayu yang merupakan peletakan semua komponen-komponen elektronika yang digunakan. Dudukan servo motor berupa bidang kaca akrilik dengan dimensinya adalah :
Sedangkan dudukan untuk sistem mekanik pada dudukan motor servo ini adalah dari bahan kaca akrilik transparan dengan dimensi :
Panjang : 22,5 cm Lebar : 16 cm Tinggi : 6 cm
c. Dudukan Rangkaian Elektronika
Terdiri dari tiga tingkat dengan ukuran dari dudukan rangkaian elektronika yaitu : Tinggi : 18,5 cm
Lebar : 20,5 cm Panjang : 25,5 cm Tingkat I : 0,8 mm Tingkat II : 9 cm
Tata letak dimaksudkan agar komponen-komponen elektronika yang digunakan memiliki posisi yang tetap, dan kokoh. Tingkat dasar terdapat rangkaian power supply dengan trafo untuk masukan dari sumber AC, di tingkat dua terdapat mikrokontroler sebagai pengendali utama dan di tingkat tiga terdapat tampilan LCD, keypad untuk isyarat masukan yang akan diproses mikrokontroler, dan dudukan sistem gerak dc motor servo yang terhubung langsung dengan kaki sistem model panel surya. Secara keseluruhan adalah seperti gambar berikut :
Gambar 4.4. Model Sistem Pengendalian Panel Surya
2. Rangkaian Elektronika
Terdiri dari rangkaian power supply, rangkaian pengendali dan rangkaian untuk sensor posisi berupa potensiometer. Power supply untuk pembangkit tegangan untuk komponen-komponen di dalam rangkaian pengendali. Rangkaian pengendali terdiri dari mikrokontroler ATMega8535 sebagai pengendali utama, mengendalikan putaran motor, sensor, tampilan di LCD, dan masukan melalui
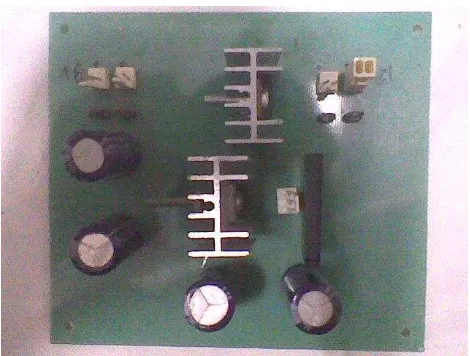
a. Power Supply
Memiliki 9 V digunakan sebagai tegangan masukan untuk mikrokontroler ATmega 8535. Untuk mendapatkan tegangan 9 V yang stabil digunakan sebuah IC regulator LM7809. Karena pada modul DT-AVR terdapat IC regulator
LM7805 yang menghasilkan tegangan 5 V, sehingga pada rangkaian power supply tidak lagi menggunakan IC regulator LM7805. Gambar power supply
seperti berikut :
Gambar 4.5. Rangkain Power Supply
b. Rangkaian Pengendali Mikrokontroler ATMega8535
Tegangan sumber Vs 9 V dan ground didapat dari power supply melalui pin-pin
konektor. Mikrokontroler ATMega8535 merupakan pengendali utama untuk mengatur gerak motor yaitu dari isyarat keluaran pin-pin port B, posisi panel surya melalui isyarat keluaran dari potensiometer, dan isyarat keluaran keypad
c. Rangkaian Tampilan dan Keypad
Keypad terhubung dengan port C dari Mikrokontroler ATMega8535, sebagai masukan untuk menjalankan sistem pengendalian model posisi panel surya. Tampilan berupa LCD 2x16 karakter memiliki 16 pin, pin 1 dan 2 berupa ground
dan Vs 5 Vdc yang diambil dari keluaran mikrokontroler ATMega8535, pin 3
merupakan pengatur kontras tampilan yang terhubung dengan potensiometer, potensiometer memiliki 3 pin, 2 pin lainnya adalah Vs dan ground yang bernilai sama dengan Vs LCD, sehingga diambil pula dari keluaran pin Vs dan ground
mikrokontroler ATMega8535 yang lain.
d. Rangkaian Sensor
Menggunakan potensiometer, potensiometer terhubung dengan poros dc motor servo pada sistem mekanik pengendalian posisi model panel surya. 3 kaki pin potensiometer, 2 pin adalah Vs 5 V dan ground sedangkan 1 pin lainnya ke pin port A Mikrokontroler ATMega8535.
3. Perangkat Lunak
Perangkat lunak dimaksudkan untuk menuliskan program yang akan di download
ke mikrokontroler. Perangkat lunak yang digunakan adalah CodeVisionAVR. CodeVisionAVR merupakan software C- cross compiler, dimana program dapat ditulis menggunakan bahasa-C. Dengan menggunakan pemrograman bahasa-C diharapkan waktu disain (developing time) akan menjadi lebih singkat. Setelah program dalam bahasa-C ditulis dan dilakukan kompilasi tidak terdapat kesalahan (error) maka proses download dapat dilakukan. Mikrokontroler AVR mendukung sistem download secara In-System Programming (ISP).
Cara memulai project baru pada CodeVisionAVR adalah :
1. Jalankan software CodeVisionAVR.
2. Buat project baru pilih File→New pilih project lalu tekan tombol OK.
3. Kemudian muncul dialog apakah akan menggunakan CodeWizard AVR untuk mempermudah merancang kerangka program. Pilih YES.
4. Board yang digunakan menggunakan chip ATMega8535 dengan clock 4 MHz, kemudian pilih tab Ports.
5. Kemudian pilih File→Generate, Save and Exit.
B. Pengujian Perangkat Keras Dan Perangkat Lunak
1. Pengujian Port Mikrokontroler
simulasi nyala led dengan menggunakan program sederhana menyalakan led di
port A. Berikut ini merupakan listing program menyalakan led di port A:
{
Berdasarkan program diatas maka tampilan yang didapatkan pada nyala led yaitu pada saat program pertama kali dijalankan maka led akan menyala yaitu led yang dihubungkan dengan P1.0 sampai dengan P1.3 kemudian setelah selang waktu yang telah ditentukan pada delay maka nyala led akan berjalan dari awal hingga akhir kemudian diulang lagi mulai awal hingga akhir begitu seterusnya.
Pengalamatan Port Mikrokontroler ATMega8535 yaitu sebagai berikut :
Tabel 4.1. Pengalamatan Port Mikrokontroler
Mulai
Tabel 4.1. Pengalamatan Port MikrokontrolerLanjutan.
Alamat Keterangan Port C.5 Keypad (Baris-2)
Port C.6 Keypad (Baris-3)
Port C.7 Keypad (Baris-4)
Port D.2 Motor Servo
2. Pengujian Keypad Dan LCD
Pengujian keypad dan LCD dilakukan untuk dapat mengetahui baik atau tidaknya
keypad dan LCD bekerja.
Diagram Alir pemrograman untuk menu masukan melalui keypad dan tampilan di LCD adalah sebagai berikut :
Melalui program uji keypad dan LCD pada mikrokontroler ATMega8535 didapatkan hasil sebagai berikut :
Tabel 4.2. Uji Keypad dan LCD
Tekan Keypad Tampilan LCD
A A
Sedangkan untuk mengatur terang gelap LCD menggunakan potensiometer.
3. Pengujian Sensor Potensiometer
Hasil uji untuk potensiometer berdasarkan perubahan nilai resistansi terhadap terang dan gelapnya tampilan di LCD. Saat nilai resistansi rendah tampilan LCD sangat terang, begitu juga dengan sebaliknya.
Tabel 4.3. Hasil uji potensiometer
Putar
Potensiometer Tampilan LCD
Penuh Kekiri Sangat Terang
Ketengah Terang
Mulai
Tegangan Analog Potensio
Mengubah Analog to Digital
Tegangan
Interfacing to Mikrokontroller
Membuat Program
Mikrokontroller
Dengan ADC
Program Berhasil
Menampilkan ke LCD Melalui
Keypad
Selesai
Tidak
Ya
Diagram Alir pengujian pemrograman untuk sensor potensiometer ini adalah sebagai berikut :
Mulai
Selesai Memberi PIN B7
Logika High
Memberi PIN B8 Logika High
Mengatur Sudut Posisi
Menampilkan Sudut Posisi Pada
LCD Menentukan
PORT B
Motor Berputar
Kekiri Motor
Berputar Kekanan
Menentukan PIN 4. Pengujian Motor
Untuk mengaktifkan motor keluaran diberikan logika 1, sedangkan untuk menonaktifkan diberikan logika 0.
C. Analisa dan Pembahasan
1. Model Alat
Pemodelan sistem dengan menggunakan dc motor servo continous dengan sebidang bahan akrilik sebagai model panel sedangkan poros motor servo dihubungkan dengan potensiometer.
Untuk kaki-kaki pin motor servo dihubungkan ke mikrokontroler ATMega8535 melalui konektor-konektor, seperti pada gambar berikut :
Gambar 4.10. Pin Motor Servo
Tegangan yang dibutuhkan servo motor adalah 5 V dc, sehingga bisa diambil juga dari keluaran mikrokontroler Vcc dan ground. Begitu juga dengan potensiometer
memiliki 3 pin dimana pin 2 terhubung dengan pin Port A pada mikrokontroler sedangkan 2 pin lainnya terhubung dengan Vcc dan ground dari mikrokontroler
Selain terhubung ke servo motor dan potensiometer, mikrokontroler juga terhubung dengan keypad dan LCD. Keypad butuh 8 kaki pin, sesuai dengan jumlah pin I/O di satu port mikrokontroler, sedangkan untuk LCD memiliki 16 kaki pin. Pin 1 dan 2 adalah ground dan Vcc, pin 3 terhubung dengan
potensiometer lain untuk pengaturan kontras tampilan di LCD.
Masih pada LCD, pin 4 – 6 terhubung dengan pin 1-3 dari pin I/O mikrokontroler, pin 7 – 10 kaki LCD merupakan pin bebas dan juga tidak terhubung ke
Gambar 4.11. Power Supply
2. Pengujian Model Sistem
a. Hasil Pengukuran
Latitude : 05:21,6916’ South = 05:21’:41,514” Lintang Selatan Longitude : 105:14,5632 East= 105:14’:30,84” Bujur Timur
Tabel 4.5. Posisi Surya Sepanjang Tahun
No Tanggal Posisi Surya
Pukul 06.00 Pukul 18.00 1 1 Januari 2009 10 1780
Sehingga diperoleh data posisi ideal untuk penentuan sudut posisi surya yaitu terbit pukul 06.00 dan tenggelam pada pukul 18.00. Hasil Pengukuran perbandingan nilai ADC potensiometer dengan sudut model sistem :
Tabel 4.6. Hasil Pengukuran ADC berdasarkan sudut
Sudut ADC
Penentuan waktu berdasarkan sudut :
Tabel 4.7. Penentuan Waktu Menurut Sudut
Waktu Sudut
b. Pengoperasian Alat
pengoperasian alat. Servo continous motor digerakkan ke posisi yang dimaksud yaitu pada sudut 1500 atau nilai ADC sekitar 22, dengan menggunakan tombol angka 9. Pada pengoperasian alat ini mikrokontroler akan merespon setelah penekanan tombol keypad, sesuai instruksi tersebut motor servo akan bergerak ke posisi yang dimaksud. Sistem servo merupakan sistem kendali terbuka karena telah diperoleh posisi stabil untuk masing-masing posisi sudut. Penggunaan
keypad dimaksudkan sebagai masukan untuk menjalankan looping program pada mikrokontroler, alasan penggunaan keypad ini agar sistem dapat dengan mudah dioperasikan dan dilakukan pengendalian posisi pada saat terdapat gangguan pada posisi sistem. Setelah posisi yang dimaksud tercapai, seperti halnya pada panduan, terdapat pilihan-pilihan posisi sudut yang bisa dituju, dapat dilihat dalam tabel berikut :
Tabel 4.8. Penjelasan Tombol Keypad
Tekan Keypad Tampilan LCD
1 Sudut 300
Selain tombol-tombol diatas, berikut adalah penjelasan tombol-tombol keypad
lainnya :
Tabel 4.9. Penjelasan Tombol Lain
Tekan Keypad Tampilan LCD
0 Tampilan Awal
A Tampilan ADC
B Tampilan Sudut
C Tampilan Waktu
D Tampilan ADC, Sudut, dan Waktu
Poin-poin dalam penyelesaian tugas akhir ini, dibuat sebuah pemodelan sistem yang hampir mirip secara teknis maupun prinsip kerjanya berdasar pada tujuan tugas akhir ini, yaitu diperoleh :
1. Sistem sederhana pengendalian posisi.
2. Pembuatan rangkaian elektronika yang sesuai dengan tujuan tugas akhir. 3. Pemrograman mikrokontroler ATMega8535 sesuai dengan sistem sederhana
pengendalian posisi.
Disamping itu banyak kekurangan juga dalam keakuratan posisi ideal yang diinginkan, yaitu posisi sudut yang selalu tegak lurus dengan cahaya surya.
Faktor-faktor itu antara lain :
1. Adanya tegangan bocor yang membuat servo continous motor berubah posisi sudut.
3. Keterbatasan kemampuan programming sehingga masih perlu banyak pembenahan dalam perancangan dan pembuatan program.
Dalam pembuatan program keseluruhan itu melalui tahap-tahap yaitu :
1. Menentukan Port A untuk potensiometer yang diatur sebagai sensor posisi. 2. Menetukan Port B untuk LCD.
3. Menentukan Port C untuk keypad.
4. Menentukan Port D untuk servo continous motor.
Memasukkan fungsi tambahan keypad ke inc folder cvavr sehingga dapat memanggil dan mengoperasikan keypad. Sedangkan untuk fungsi ADC, LCD, dan pwm sudah terdapat di cvavr.
3. Pemrograman
Pembuatan program dilakukan dengan menggunakan software codevision avr. Memilih new project dan menggunakan CodeWizardAVR. Menentukan parameter-parameter yang akan digunakan, yaitu setting chip ke ATMega8535,
Gambar 4.12. Setting chip ATMega8535 pada codevision avr
Gambar 4.14. SettingPort B
Gambar 4.16. Setting Timer 0
Pilih menu file, generate, save and exit kemudian simpan 3 kali dengan nama yang sama yaitu Kendali Posisi Panel Surya.
Menambahkan fungsi-fungsi utama yaitu :
#include <keypad.h> #include <stdio.h> #include <delay.h>
Kemudian mendefinisikan pwm pada Port D.2 untuk perputaran motor servo ke kiri mencapai posisi awal untuk menentukan sudut yang diinginkan yaitu :
#define pwm PORTD.2
Mendeklarasikan variabel yaitu pwmKi_val, pwmKa_val, dan x, dengan menuliskan :
Membuat listing program pada interrupt timer :
Untuk pengendalian motor servo berputar mencapai sudut yang diinginkan dengan menuliskan :
#define ctrl PORTD.2
Sedangkan listing program untuk menentukan posisi sudut yaitu :
void putar_servo30 (unsigned char input) {
void putar_servo45 (unsigned char input) {
void putar_servo60 (unsigned char input) {
for(i=1; i<=11.999; i++)
void putar_servo75 (unsigned char input) {
void putar_servo90 (unsigned char input) {
void putar_servo105 (unsigned char input) {
void putar_servo135 (unsigned char input)
Untuk memanggil void penentuan sudut-sudut tersebut dilakukan melalui keypad, dengan masing-masing fungsi tombol pada keypad, yaitu :
void Push_1catch(void) {
void Push_2catch(void) {
void Push_3catch(void) {
void Push_4catch(void) {
unsigned char data; PORTD=0x00;
putar_servo75(data); data=20; if (data==20) data=200;
void Push_5catch(void) {
void Push_6catch(void) {
void Push_8catch(void) { lebih stabil, dengan menuliskan :
delay_us(10);
Agar LCD dapat menampilkan nilai ADC menuliskan deklarasi variable :
Menampilkan kata-kata pembuka pada LCD, didalam module inisialisasi LCD ditulis:
lcd_init(16); lcd_gotoxy(0,0);
lcd_putsf(” KENDALI POSISI PANEL SURYA”);
Sehingga pada LCD akan tampil tulisan seperti gambar dibawah :
Gambar 4.17. Tampilan Pembuka LCD
Dalam global interrupt fungsi assembly menuliskan program untuk pwm, yaitu :
pwm=1;
Dalam fungsi while, memanggil fungsi keypad. Software codevision avr, tidak memiliki library fungsi untuk keypad, sehingga menambahkan fungsi keypad.h kedalam file inc codevision avr dengan nama keypad.h. Fungsi keypad.h ini disebut juga fungsi compiler header untuk keypad. Listing program keypad.h ini adalah sebagai berikut :
#ifndef keypad_INCLUDED_ #define keypad_INCLUDED_
void Push_0catch(void);
void Push_1catch(void);
void Push_2catch(void);
void Push_4catch(void);
void Push_5catch(void);
void Push_6catch(void);
void Push_7catch(void);
void Push_8catch(void);
void Push_9catch(void);
void Push_1pulcatch(void);
void Push_2pulcatch(void);
void Push_3pulcatch(void);
void Push_4pulcatch(void);
void Push_5pulcatch(void);
void Push_6pulcatch(void);
void Push_7pulcatch(void);
void Push_8pulcatch(void);
void Push_9pulcatch(void);
void Push_0prcs(void);
void Push_1prcs(void);
void Push_2prcs(void);
void Push_3prcs(void);
void Push_4prcs(void);
void Push_5prcs(void);
void Push_6prcs(void);
void Push_7prcs(void);
void Push_8prcs(void);
void Push_9prcs(void);
void Push_10prcs(void);
void Push_11prcs(void);
void Push_12prcs(void);
void Push_bintang_prcs(void);
void Push_pagar_prcs(void);
void Push_A_prcs(void);
void Push_B_prcs(void);
void Push_C_prcs(void);
void Push_D_prcs(void);
void Push_0dsp(void);
void Push_10dsp(void);
void Push_11dsp(void);
void Push_12dsp(void);
void Push_bintang_dsp(void);
void Push_pagar_dsp(void);
void Push_A_dsp(void);
void Push_B_dsp(void);
void Push_C_dsp(void);
void Keypad(void)
case 8 : Push_bintang_prcs();
case 2 : Push_6catch();
break;
case 4 : Push_9catch();
break;
case 8 : Push_pagar_prcs();
break;
compiler header keypad.h. Setiap tombol pada keypad akan menjalankan fungsi-fungsi tertentu yang sudah dituliskan.
Sebagai contoh untuk menampilkan nilai ADC menggunakan tombol A, listing
programnya adalah sebagai berikut :
void Push_A_prcs(void) {
lcd_clear(); lcd_gotoxy(0,0);
}
Potensiometer terhubung dengan Port A.2. Nilai ADC dari potensiometer akan tampil ketika tombol A ditekan. Nilai ADC ini akan berbeda-beda dari 0 – 255 sebatas putaran 3000 dari potensiometer. Sebagai contoh LCD menampilkan nilai ADC 117 seperti pada gambar berikut :
Gambar 4.18. Menampilkan Nilai ADC di LCD
Begitu juga dalam membuat menu-menu program, dapat ditampilkan pada LCD. Untuk perhitungan Sudut, potensiometer dapat berputar 3000 dengan nilai ADC yang dihasilkan adalah 0 – 255. Dari data yang diperoleh pada pengukuran perbandingan nilai ADC dan sudut, serta penentuan waktu menurut sudut dibuat
listing program untuk menampilkan nilai ADC, sudut dan waktu yaitu :
lcd_puts(lcd_buffer);
Hasil pengambilan data penentuan sudut posisi :
Tabel 4.10. Hasil Data Penentuan Sudut Posisi
Keypad Sudut
Pada pengambilan data penentuan posisi sudut, dilakukan sampling 10 kali untuk masing-masing sudut yaitu, 300, 450, 600, 750, 900, 1050, 1200, dan 1350. Dari data yang diperoleh, untuk menentukan sudut 300, 900, 1050, 1200, serta 1350 diperoleh keberhasilan 100%, kemudian untuk sudut 750 tingkat keberhasilan adalah 60%, sedangkan untuk sudut 600 dan 450, masing-masing adalah 30% dan 10%. Analisa penyebab tersebut yaitu adanya pembebanan pada motor servo, ketika motor bergerak dan saat akan berhenti ada gaya dorong yang menyebabkan servo motor tidak tepat berhenti di sudut yang diinginkan.
Simpangan baku atau deviasi standar adalah ukuran sebaran statistik yang paling lazim. Singkatnya standar deviasi ini mengukur bagaimana nilai-nilai data tersebar. Simpangan baku didefinisikan sebagai akar kuadrat varians. Simpangan baku merupakan bilangan tak-negatif dan memiliki satuan yang sama dengan data.
Dari hasil pengukuran sudut terhadap nilai ADC pada tugas akhir ini dilakukan sampling sebanyak 10 kali, sehingga dapat dicari simpangan baku dari pengambilan data tersebut untuk mengetahui tingkat simpangan dari data yang terukur, semakin besar nilai nilai simpangan baku ini maka semakin besar pula nilai kesalahan hasil pengukuran data. Begitu juga sebaliknya.
Untuk mencari nilai simpangan baku ini digunakan rumus :
S =
n = Banyaknya jumlah sample
Dari pengukuran yang dilakukan sebanyak 10 kali untuk pengukuran ADC terhadap sudut diperoleh data seperti pada tabel 4.6. Dengan menggunakan program microsoft excel diperoleh :
Sudut ADC Standar Deviasi
1 2 3 4 5 6 7 8 9 10
300 194 192 193 198 193 194 192 193 192 195 1.837873167 450 173 173 174 173 171 172 173 173 174 173 0.875595036 600 153 153 160 154 155 152 156 157 157 152 2.601281735 750 132 132 131 132 135 132 129 128 133 128 2.250925735 900 109 111 112 111 112 112 108 110 110 110 1.354006401 1050 87 88 90 88 87 90 89 86 84 87 1.837873167 1200 64 65 65 67 64 65 66 65 62 63 1.429840706 1350 46 42 46 48 47 48 47 44 45 45 1.87379591 1500 26 27 27 28 27 28 29 27 27 26 0.918936583
V. SIMPULAN DAN SARAN
A. SIMPULAN
Berdasarkan hasil perancangan dan analisa hasil tugas akhir, dapat ditarik beberapa simpulan antara lain:
1. Sudut posisi yang dicapai yaitu 300, 450, 600, 750, 900, 1050, 1200, 1350 dan 1500 yang ditentukan manual melalui keypad 4x4 dan ditampilkan pada LCD 2x16.
2. Motor Servo Continous sebagai aktuator gerak dengan poros motor terhubung kaca akrilik sebagai model panel surya dan terhubung potensiometer sebagai sensor penghasil ADC.
3. Kesalahan nilai ADC terhadap sudut posisi dihitung melalui rumus simpangan baku yang dilakukan sample sebanyak 10 kali pada masing-masing sudut dengan nilai rata-rata simpangan baku 1.664458716.
B. SARAN
1. Perancangan sistem mekanik dengan menggunakan panel surya, tidak hanya model.