PERFORMANSI MEKANISME ROBOT PENYELAMAT iSRo MENGGUNAKAN SIMULASI PERANGKAT LUNAK WEBOTS
Ahmad Zulkarnain #1, Son Kuswadi #2, Indra Adji Sulistijono #3 #
Jurusan Mekatronika, Politeknik Elektronika Negeri Surabaya Institut Teknologi Sepuluh Nopember
1 [email protected] 2 [email protected] 3 [email protected] Abstrak
Evakuasi korban setelah bencana alam adalah hal terpenting tetapi sulitnya medan yang dihadapi membuat evakuasi membutuhkan waktu yang lama sekitar 48 jam bagi tim penolong untuk menemukan posisi korban sehingga korban yang ditemukan banyak dalam keadaan tewas. Hal ini diakibatkan karena sulitnya medan dan rintangan yang dihadapi. Dalam hal ini robot adalah alat yang cukup tepat digunakan untuk menggantikan pekerjaan tersebut. Dalam proyek akhir ini robot yang mempunyai mekanisme baru. Kinerja dari robot ini dapat bergerak lebih fleksibel menjangkau lokasi pasca bencana alam sehingga dapat digunakan untuk keperluan mencari dan menyelamatkan korban. Oleh karena itu Simulasi robot dibutuhkan sebelum membuat robot dalam bentuk aslinya Simulasi dapat mengurangi trial dan error karena melalui simulasi dapat dilihat apakah robot tersebut dapat melakukan manuver yang diinginkan dengan kondisi pasca bencana alam Webots merupakan software yang dipakai pada tugas akhir ini. Webots memungkinkan pengguna untuk membuat dunia maya 3D dengan fisika properti seperti massa, sendi, koefisien gesekan. Pengguna dapat menambahkan objek pasif sederhana aktif atau objek. Robot dapat dibuat beberapa tipe (robot beroda, berkaki robot, atau robot terbang).
Kata kunci: Simulasi, Webots, behaviour-based
I. PENDAHULUAN 1.1. LATAR BELAKANG
Kondisi umum Indonesia negara rawan bencana, berada pada pertemuan tiga lempeng tektonik utama dunia (lempeng Eurasia, India Australia, Samudera Pacific). Lebih 500 gunung api (128 aktif) Negara kepulauan, 2/3 air, 500 sungai besar dan kecil (30 % melintas padat
penduduk). Keadaan tersebut menyebabkan
Indonesia sering mengalami bencana alam diantara bencana terbesar yang pernah dialami oleh bangasa indonesia adalah gempa bumi di D.I Yogyakarta 2006 menewaskan 6000 jiwa dan tsunami di Aceh 2004 menewaskan 220.000 jiwa. Keadaan pasca bencana tsunami di Aceh dapat dilihat pada gambar 2.3
Gambar 2.3: Pasca Tsunami di Aceh
Sumber:http://umum.kompasiana.com/2009/12/26/t
sunami-yang-tersisa-adalah-pelajaran-5/ (diakses
pada tanggal 8 juni 2012 pukul 21.00 WIB)
Pencarian korban sering dilakukan menggunakan mesin berat seperti trakator untuk mengangkat reruntuhan atau tim SAR mencari langsung dengan medan yang sulit untuk dilewati dan reruntuhan yang berat ini menyebabkan pencarian memakan waktu yang lama.
Salah satu penyebab korban banyak yang berjatuhan adalah Pencarian korban oleh tim SAR (Search and Rescue) pasca bencana membutuhkan waktu yang lama karena medan yang dihadapi dan keterbatasan peralatan untuk mencari korban yang masih hidup diantara puing-puing. Padahal statistik tingkat kelangsungan hidup pada berbagai bencana gempa bumi menunjukkan bahwa penyelamatan dalam 3 jam yang diinginkan, dan bahwa tingkat kelangsungan hidup secara drastis menjadi rendah setelah 72 jam, yang disebut ‘gold 72 hours’ [15].
Sistem robot telah diajukan dalam banyak penelitian yang berbeda, dan berhasil diterapkan dalam banyak aplikasi. Teknologi perbaikan baik dalam hardware dan perangkat lunak yang terkait mendorong aplikasi robot ke arah lebih kompleks seperti aplikasi rescue robot. Rescue robot memiliki potensi yang sangat besar seperti yang ditunjukkan untuk pertama kalinya pada skala yang
lebih besar
dalam upaya dengan membantu bencana di World Trade Center Amerika. Fungsi robot disini menggantikan tim SAR yang mempunyai tugas melewati daerah bencana yang kondisinya tidak
tentu (walk on uncertain field), mendeteksi
kemungkinan adanya korban (search), dan
memberitahukan kepada tim SAR untuk
mengevakuasi korban (rescue)[6].
Simulasi sangat dibutuhkan untuk mendesain sebuah robot karena efisiensinya. Di satu sisi, hal itu memungkinkan evaluasi alternatif yang berbeda selama tahap desain sistem robot yang mengarah ke
desain yang lebih baik termasuk dalam
penghematan biaya. Di sisi lain dalam simulasi dapat mencoba kontrol robot baik digunakan melalui remote ataupun full otonomus dengan waktu yang lebih cepat dibandingkan dicoba pada robot yang sesungguhnya.
1.2. TUJUAN
Tujuan dari proyek akhir ini adalah membuat suatu simulasi dimana dalam simulasi
tersebut diprediksikan segala kemungkinan
mekanisme gerakan baik menggunakan kaki, belt
maupun secara hybrid yang dapat
diimplementasikan pada robot. Selain itu dalam simulasi ini akan diberikan kecerdasan
behaviour-based untuk implementasi robot otonomus.
1.3. METODOLOGI
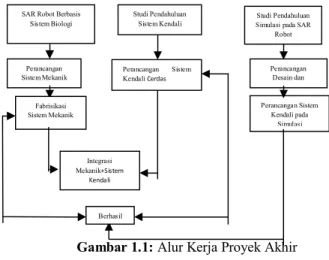
Metodologi yang digunakan pada penelitian tugas akhir ini adalah sebagai berikut dan dapat dilihat pada gambar 1.1:
Gambar 1.1: Alur Kerja Proyek Akhir II. STUDI PENDAHULUAN
2.1. Simulasi.
Simulasi adalah proses merancang model sistem fisik yang sebenarnya atau teoritis, menjalankan model, dan menganalisis output eksekusi. Prinsip "belajar" adalah penting dalam simulasi. Dengan simulasi kita dapat belajar tentang sesuatu dalam cara yang sangat efektif dan sementara kita dapat memodifikasi "aturan" mengamati efek dari interaksi kita. Melalui simulasi mampu memecahkan masalah secara
efektif seperti penyelidikan desain, visualisasi, dan uji objek atau bahkan jika tidak ada dapat dilihat bahakan sebelum sebuah sistem dibuat.[7]
Robot simulator adalah alat yang mudah digunakan robot untuk penelitian mengembangkan dan menguji pengendali robot baru. Salah satu keuntungan utamanya adalah bahwa dengan simulasi dapat menghemat waktu dan tenaga daripada bekerja dikeadaan yang sebenarnya. Hal ini diakrenakan waktu di simulasi biasanya berjalan lebih cepat dari waktu sebenernya dan oleh karena itu hasil percobaan lebih cepat mendapatkan hasil karena sedikit waktu yang dihabiskan untuk men-setup sebuah lingkungan dalam simulasi daripada di dunia nyata. Selain itu, simulasi dapat
melakukan pengulangan berkali-kali dengan
konsisten. Keadaan seperti ini sangat membantu, misalnya, ketika kita perlu membandingkan pengendali robot dalam dua kondisi identik (robot dan lingkungan). Akhirnya, dengan beberapa paradigma belajar seperti reinforcement learning, perlu untuk memungkinkan robot untuk berbuat salah untuk belajar dimana dengan simulasi dapat memungkinkan pergantian program behaviour untuk mendapatkan hasil yang diinginkan. Simulasi robot, dalam kasus seperti itu, akan sangat efisien untuk mengatur ulang pengaturan percobaan
setelah seperti kesalahan dan juga akan
meminimalkan resiko kerusakan pada robot.[8] Simulasi telah lama digunakan untuk sebuah penelitian di bidang robotik. Robotika merupakan bidang yang sangat interdisipliner semua aplikasi baru, metodologi dan teknologi dalam bagian robotika mensyaratkan untuk mensimulasikan sistem robot dan lingkungan dengan kecanggihan cukup dan akurasi[7]. Berikut ini, peranan simulasi dibeberapa bidang robot:
1. Simulasi manipulator robot 2. Off-line programming 3. Humanoid robots
4. Robot dalam bidang medik 5. Mobile robotics
6. Nanorobotics 7. Space robotics
Untuk tugas akhir ini yang bersifat penelitian dalam membuat rescue robot yang menggunakan
hybrid mechanism maka sangat membantu sekali
simulasi. Dalam tugas akhir ini menggunakan software Webots untuk simulasi karena kehandalan software dalam membangun sebuah mobile robot dan Webots sendiri telah banyak digunakan dalam banyak peniltian robot baik humanoid, manipulator ataupun mobile robot.
Perancangan Sistem Mekanik SAR Robot Berbasis
Sistem Biologi
Studi Pendahuluan Sistem Kendali
Studi Pendahuluan Simulasi pada SAR
Robot Fabrisikasi Sistem Mekanik Integrasi Mekanik+Sistem Kendali Perancangan Desain dan Perancangan Sistem Kendali pada Simulasi Berhasil Perancangan Sistem Kendali Cerdas
2.2 Webots.
Cyberbotics Ltd didirikan pada tahun 1998 sebagai sebuah spin-off perusahaan dari Swiss
Federal Institute of Technology di Lausanne (EPFL). Saat ini terdapat dua orang karyawan yang
mengembangkan WebotsTM: perangkat lunak komersial yang digunakan untuk simulasi prototipe
mobile robot dan transfer ke robot sebenarnya.
Pada tahun 1998 dan 1999 Cyberbotics
mengembangkan AIBO ® simulator untuk Sony Ltd.[4]
Webots dapat bekerja pada sistem operasi Windows, Linux dan Mac OS X dan merupakan ditujukan bagi para peneliti dan guru yang tertarik dengan mobile robotics. Meskipun tujuan akhir adalah robot sebenarnya, sangat berguna untuk melakukan simulasi sebelum penyelidikan dengan robot sebenarnya. Ini karena simulasi lebih mudah untuk pengaturan, lebih murah, lebih cepat dan lebih nyaman untuk digunakan. Merancang model robot yang baru dan melakukan percobaan hanya
membutuhkan waktu yang singkat. Sebuah
simulasi robot lebih sedikit mengeluarkan biaya daripada trial and error robot nyata yang di
lakukan pada robot sebenarnya sehingga
memungkinkan eksplorasi desain yang lebih baik.
Simulasi lebih cepat mendapatkan hasil
dibandingkan dengan mencobanya dengan robot sebenarnya dan paramater pada simulasi seperti
sensor dan aktuator dapat dengan mudah
ditampilkan dan diintegrasikan. Simulasi dapat
memungkinkan menggunakan komputer
menjalankan algoritma yang rumit yang jika
dijalankan dengan mikrocontroller selain
membutuhkan biaya yang sangat mahal dan komputasi yang lama seperti algoritma genetika. Akhirnya, hasil simulasi dapat ditransfer ke robot sebenarnya.[4]
III. DESAIN DAN SIMULASI
3.1. Perancangan Desain dan Simulasi Robot iSRo
Perancangan dalam tugas akhir ini terinspirasi oleh mekanisme tubuh manusia bagian
pundak yang berhubungan dengan lengan.
Mekanisme tersebut selanjutnya di
implementasikan pada robot yang nantinya akan di hadapkan oleh lingkungan yang tidak dapat diprediksi seperti yang terlihat pada gambar 3.1.
.
Gambar 3.1: (a) Inspirasi Biologi Pundak
Manusia, (b) Desain Cad
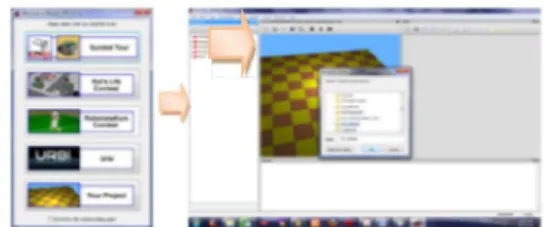
Langkah awal untuk project merancang robot pada webots adalah anda harus membuat folder pada computer anda My_Webots yang nantinya berisikan tentang semua informasi subdivisi(World, Controllers , dan plugin) caranya pilih toolbar wizard-New Project Directory. Selanjutnya pilih folder dimana anda membuat folder My_webots sebelumnya seperti yang ditunjukan gambar 3.2.
Gambar 3.2: Langkah awal Merancang Robot
pada Webots
Merancang robot dalam webots adalah kita membuat robot pada world webots. World adalah 3D virtual environment dimana kita dapat membuat robot didalamnya dimana sebelumnya Dengan software Webots seorang perancang dapat membuat desain robot yang hampir sama dengan bentuk aslinya. Webots menggunakan bahasa VRML97 3D tetapi tidak dalam bahasa VRML yang lengkap, berikut beberapa contoh bahasa VRML yang digunakan dalam webots:
Appearance, Background, Box, Color, Cone, Coordinate, Cylinder, DirectionalLight,
ElevationGrid, Extrusion, Fog, Group,
ImageTexture, IndexedFaceSet, IndexedLineSet,
Material, PointLight, Shape, Sphere,
TextureCoordinate, TextureTransform, Transform, Viewpoint and WorldInfo.
Untuk merancang robot yang sangat presisi webots menyediakan tool yang tidak
disediakan oleh VRML97, berikut adalah
contohnya:
Accelerometer, Camera, Charger,
Connector, CustomRobot, DifferentialWheels, DistanceSensor, Emitter, GPS, Gripper, HyperGate, LED, LightSensor, Pen, Physics,
Receiver, Servo, Solid, Supervisor and
Gambar 3.3 menunjukan dimana yang disebut dalam webots sebagai scene tree. Pada
scene tree kita dapat mulai merancang robot mulai
dari desain menambahkan sensor sampai membuat kontrolernya serta memberikan nilai seperti nilai torsi, kecepatan, percepatan, dan gaya yang dikarenakan gerakan robot .
Pemberian komponen dinamik juga dapat
diberikan misalnya torsi dan berat robot.
Komponen untuk sensor, servo motor, motor dc dan sebagainya tersedia dalam Webots seperti yang ditunjukan gambar 3.3.
Gambar 3.3: Scene tree
Robot iSRo memilki bentuk kotak untuk bagian tangahnya yang merupakan center massa juga maka untuk menggambarnya dimulai dari membuat sebuah kubus yang terdiri dari rusuk-rusuk
1. Buat node solid, beri nama Body
2. Sisipkan node transform pada node childrennya, beri nama HEAD
3. Sisipkan node transform pada node children
transform HEAD, beri nama A
4. Sisipkan node shape pada node node children A 5. Buat bidang seperti rusuk sebuah kubus seperti
yang terlihat pada gambar 3.4 dengan mengulang langkah 4
Gambar 3.4: Rangka Utama
Mekanisme robot iSRo memiliki dimensi yang simetris maka dimana bagian kanan kirinya sama oleh karena itu pembuatan mekaniknya dalam perancangan kali ini juga seperti itu, bagian kanan yang akan dibuat terlebih dahulu lalu dengan mencopy bagian kanannya maka bagian kirinya otomatis akan sama.
Tahap selanjutnya adalah
membuat bagian kanan robot dimulai dari rangkanya. Buat dua buah balok kecil yang akan
diletakan padah bagaian tengah sela-sela bagian robot
1. Sisipkan node transform pada node children BODY, beri nama ARM_R
2. Sisipkan node transform pada children ARM_AR, beri nama F2
3. Sisipkan node transform pada children F2, beri nama ANKLE
4. Sisipkan node shape pada children ANKLE, buat box dengan dimensi X=0.035, Y=0.025, Z=0.08
5. Ulangi langkah 3 dan 4 namun tempatkan box ini tepat dibawahnya seperti gambar 3. 5
Gambar 3.5: Ankle Kanan 3.2 Perancangan Servo
Dalam membuat fisik dalam simulasi di webots sebuah servo bisa dibuat sedemikan rupa sesuai dengan apa yang desain dan dalam webots ini bisa saja servo hanya fungsi dalam nodenya tanpa harus ada fisiknya. Robot iSRo mempunyai konfigurasi servo, yaitu:
1. Servo Utama, menggerakan servo
pendukung pertama dan servo pendukung kedua
2. Servo pendukung pertama, menggerakan servo pendukung kedua
3. Servo pendukung kedua, bergerak bebas sendiri
Dimana dengan konfigurasi tersebut sama untuk bagian kanan dan kiri
Perancangan servo dalam tugas akhir ini dalam webots dibuat secara terpisah antara body utama, bagian kanan dan bagaian kiri sehingga nantinya node akan terdapat 3 node juga. Cara menyisipkannya adalah:
1. Klik node yang akan disisipkan node servo
Gambar 3.6: Pilih Node
Gambar 3.7: Insert After pada Scene tree
3. Pilih new node, lalu pilih servo dan klik add
Gambar 3.8: Node Servo pada Insert After
4. Beri nama dengan Arm_R (Servo Utama) Penamaan ini dapat langsung dilakukan pada node servonya namun yang paling penting adalah penamaan pada node
”name” penamaan dalam node ini
nantinya berpengaruh pada pemrograman nantinya sebagai inisialisasi device.
Gambar 3.9: Node Name pada Node Servo
Dalam webots fungsi servo akan terlihat seperti garis hitam yang menunjukan sumbu putar dari sebuah servo. Fungsi servo yang terdapat dalam webots ini hampir mempunyai fungsi yang sama dengan servo
aslinya seperti nilai torsi, kecepatan,
percepatan, tumbukan dan gesekan sekaipun. Berikut adalah hal-hal yang harus diperhatikan dalam merancang torsi dalam webots.
1. Rotation: sumbu putar yang terdapat pada
node ini kita dapat memilih di sumbu
mana servo akan aktif apakah X,Y atau Z seperti yang terlihat gambar 3.10. untuk servo utama sumbu terletak pada sumbu Z maka diberi nilai 1 dan X,Ynya 0, untuk
default nilai alpha adalah 0 merupakan
nilai dari setiap step yang berupa keliling lingkaran 2π
Gambar 3.10: Penampakan servo berupa garis
hitam lurus pada webots dan node pada scene tree
2. Besaran fisika:node physics physics
beriisikan beberapa nilai yang dapat kita rubah sesuai apa yang kita hadapi di sunia sebenernya namun kondisi awal nilai ini
adalah sudah normal. Untuk
coloumbfriction nilai untuk gesekan yang
jika kita ingin menghadirkan gesekan yang terjadi pada robot dapat kita aktifkan dengan memberikan nilai 1.
Gambar 3.11: Node Physics
3. Nilai fisika selain pada node physics: yaitu
node dibawah node ini ada beberapa node
yang perlu diperhatikan
3.1 maxvelocity:nilai yang terdapat pada
node ini disesuaikan dengan
kecepatan terdapat pada spesifikasi motor servo aslinya yang akan dipakai
3.2 maxforce:nilai yang terdapat pada
node ini disesuaiakn dengan torsi
yang terdapat pada spesifikasi motor servo aslinya yang akan dipakai 3.3 minposition dan maxposition:nilai
yang terdapat pada node ini
merupakan reprentasi dari motor servo yang digunakan continous atau
bukan jika bukan kita dapat
mengubah nilainya seperti yang terlihat gambar 3.12 dimana nilainya 1.57(π/2).
Gambar 3.12: Node yang berkaitan
dengan Nilai Fisika
3.3 Pembuatan Belt
Robot iSRo dirancang untuk bergerak
translational dengan belt sebagai pendukung
geraknya. Dan untuk pembuatan belt pada webots akan dijabarkan sebagai berikut:
1. Buat belt dengan node shape seperti membuat kotak namun tidak seperti belt dalam keadaan aslinya dimana belt merupakan satu kesatuan utuh namun
suatu keadaan yang terpisah. Disni akan dibagi menjadi empat bagian kotak yang terpisah yang saling berpasangan sehingga total ada 8 buah kotak seperti yang terlihat pada gambar 3.13.
Gambar 3.13: Fisik Belt Secara Terpisah
2. Pulley:penampakan fisik pulley pada webots berupa servo yang berbentuk seperti roda namun setiap satu roda yang mewakili satu servo. Desain sebenenrnya pada robot iSRo menggunakan motor DC, satu motor DC dapat menggerakan satu rangkaian belt sehingga setiap lengan mempunyai dua motor DC. Dalam simulasi pulley yang digunakan tetap 4
namun perlu ditambahkan pulley
bayangan atau pulley pendukung artinya hanya boundingnya saja yang dipakai agar gerakan belt serupa dengan aslinya dalam simulasi ini total pulley yang digunakan ada sembilan dengan 4 mempunyai fisik aslinya dan 5 merupakan bounding. Pemberian nilai torsi pada node maxforce cukup diberikan nilai 10 sesuai dengan aslinya. Dan semua sumbu yang aktif adalah sumbu putarnya sumbu Z berikut gambar lengan yang sudah utuh dengan pulley dan rodanya
Gambar 3.14: Node servo dan Fisik Pulley Asli
dan Pulley Bayangan
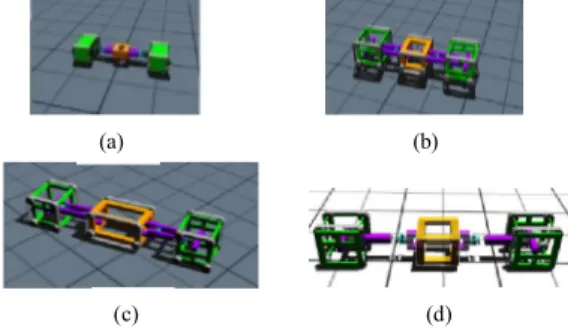
Gambar 3.15a merupakan ide awal untuk robot penyelamat iSRo yang dimaksudkan dengan desain tersebut dapat melakukan gerakan-gerakan yang mungkin melwati lingkungan yang tidak teratur seperti pada kasus lingkungan pasca bencana alam.
Pada gambar 3.15b desain tersebut kurang maksimal dalam pererakannya, oleh karena itu desain kedua dibuat dengan meletakan servo tidak bersebalahan antara servo yang satu dengan yang lain namun diberikan jarak.
Desain ketiga gambar 3.15c tidak jauh beda dengan desain kedua hanya terdapat perbedaan bentuk bagian tengah robot, dibuat lebih besar agar peletakan sensor, kamera, dan elktronik lainnya dapat terpenuhi.
Sampai pada akhrinya dibuatlah desain akhir pada gambar 3.15d yang merupakan
penyempurnaan desain desain sebelumnya
mempunyai 10 derajat kebebasan robot iSRo dengan kombinasi dari bebarapa servo yang dipunyainya dapat bergerak melewati rintangan selayaknya robot rescue yang dapat melewati rintangan tidak beraturan.
Gambar 3.15: Desain Robot iSRo (a) Desain
Pertama, (b) Desain Kedua, (c) Desain Ketiga (d) Desain akhir
Contoh pemrograman dapat dilihat pada gambar 3.16, 3.17, 3.18 dimana didalamnya sudah
terdapat keterangan untuk setiap bagian
pemrograman mulai dari pendifinisain komponen iSRo sampai pada mengaktifkan tombol dimana program tersebut merupakan kontrol melalui keyboard yang apabila salah satu tombol ditekan maka robot akan bergerak sesuai kontrol yang diberikan untuk lebih jelasnya dapat dilihat pada lampiran. Sebagai langkah awal untuk mengetahui gerakan yang dapat dilakukan oleh robot iSRo.dan kontrolnya serta mensimulasikan robot dengan segala prediksi gerakan yang mungkin dilakukan.
Gambar 3.16: Pendefinsian Komponen yang
dipakai Seperti Servo
Gambar 3.17: Looping Program
(a) (b)
Gambar 3.18: Pendefinisan Fungsi Keyboard
BAB IV PENGUJIAN DAN ANALISA
Setelah melakukan perancangan
mekanik dan software selanjutnya di lakukan pengujian simulasi untuk melihat kemampuan manuver robot iSRo apakah dengan system mekanik tersebut robot dapat handal untuk melewati rintangan seperti lingkungan pada daerah setelah bencana.
4.1 Simulasi
Setelah melakukan perancangan desain dalam webots selanjutnya melakukan percobaan simulasi gerakan robot yang memungkinkan untuk
melewati lingkungan yang tidak dapat
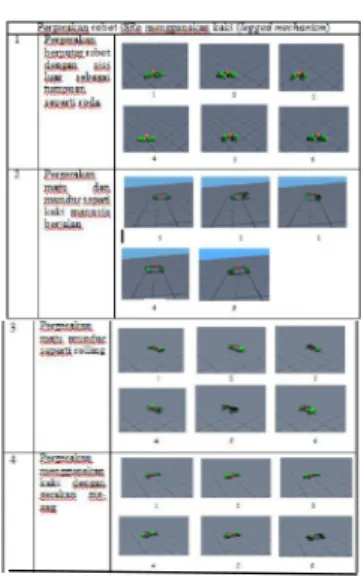
diprediksikan. Dengan menggunakan keyboard sebagai perintah bergeraknya robot maka robot iSRo dapat bergerak dan dikelompokan menjadi 3 gerakan yaitu robot iSRo dapat bergerak secara translasi mnggunakan belt (wheeled mechanism), bergerak dengan menggunakan servo atau kaki robot (legged mechansim), dan yang ketiga adalah
kombinasi antara gerakan translasi yang
menggunakan belt dan servo atau kaki (hybrid
mechanism)
Tabel 4.1: Pergerakan robot iSRo menggunakan
belt (wheeled mechanism)
Tabel 4.2: Pergerakan robot iSRo menggunakan
servo (legged mechanism)
Tabel 4.3: Pergerakan robot iSRo menggunakan
servo dan belt (Hybrid mechanism)
Dari simulasi yang dilakukan terdapat sepuluh behaviour pada rancangan sistem dengan model rancangan pertama. Selanjutnya simulasi dilakukan pada arena RoboCupRescue yang diperlihatkan gambar 4.1 untuk gerakan menaikan tangga.
Gambar 4.1: Gerakan Menggunakan Kaki
Melewati Tangga
Untuk gerakan melewati bidang miring dapat dilihat gambar 4.2 menggunakan kombinasi gerakan roda dan kaki.
Gambar 4.2: Gerakan Menggunakan Belt dan
Kaki Melewati Bidang Miring
Dari percobaan simulasi didapatkan
bahwa robot iSRo desain yang pertama samapi desain yang ketiga mempunyai sepuluh behavior dan dapat melewati beberapa rintangan seperti tangga dan bidang miring tetapi belum dapat melewati medan tidak beraturan seperti yang
terlihat pasca bencana alam. Selanjutnya
perancangan robot dilakukan penambahan derajat kebebasan pada sendi bagian tengah yang dimaksudkan agar robot dapat lebih memiliki
maneuver yang handal untuk melewati rintangan.
Desain rancangan tersebut dapat dilihat pada gambar 4.4.
Gambar 4.4: Robot iSRo dengan sepuluh derajat
kebebasan
Dengan demikian pengujian mekanik yang baru dari robot iSRo ini dilakukan seperti sebelumnya ternyata terdapat penambahan
behavior dari sebelumnya. Penambahan ini dapat
dilihat dari gambar 4.5 gerakan seperti ular yang dapat merayap dan sudah diadakan percobaaan dapat melewati rintangan dengan kondisi tinggi obstacle tidak terlalu tinggi.
Gambar 4.5: Gerakan Merayap Menggunakan Join
Baru
Gerakan yang ditunjukan gambar 4.6
merupakan gerakan baru yang dapat
memungkinkan robot berjalan atau bermanuver melewati rintangan dengan mudah
Gambar 4.6: Gerakan Menggunakan Join Baru
dengan Transformasi Baru Robot Bergerak Maju ataupun Mundur
Namun pada akhirnya desain yang dibuat adalah desain yang terkhir dimana untuk melewati tangga dapat dilakukan akan tetapi step tangga yang dilewati juga tidak bisa terlalau maksimal yaitu dua kali besar dari pulley dan pergerakan untuk melewati halangan seperti random maze atau lingkungan yang tidak dapat diprediksi seperti kedaan setelah bencana alam desain terakhir ini mempunyai gerakan manuver yang handal karena mempunyai sepuluh derajat kebebasan dengan mengkombinasikan geran servo yang dimiliki dan gerakan translasi dengan menggunakan belt
BAB V PENUTUP
Dari semua rancangan dan pengujian yang telah dibuat dalam bab-bab sebelumnya terutama bab 3 tentang perencanaan perangkat lunak, dan bab 4 tentang pengujian perangkat lunak, berikut adalah kesimpulan yang diambil beserta sarannya.
5.1 Kesimpulan
Beberapa hal yang diamati sejak perencanaan sampai evaluasi dapat diambil kesimpulan sebagai berikut :
1. Webots merupakan software simulasi
mobile robot yang dapat mensimulasikan
robot dengan cepat dengan menerapkan mekanisme hybrid akan tetapi masih ada parameter yang tidak dapat sama persis dengan aslinya seperti pergerakan belt.
2. Dengan penambahan join yang baru robot
memiliki derajat kebebasan yang tambah banyak dan membuat manuverbility robot jadi lebih handal untuk melewati rintangan yang tidak beraturan namun pemasangan sensor sulit ditempatkan dan
simulasi masih berorientasi pada
behaviour belum sampai pada pemetaan.
3. Untuk implementasi robot menggunakan
reinforcement learning masih mengalami kendala pada penempatan sensor.
5.2 Saran
Dari kesimpulan di atas dapat diambil beberapa saran untuk kesempurnaan proyek akhir ini dimasa mendatang diantaranya:
1. Harus diadakan percobaan lebih lama lagi
untuk percobaan behavior based agar robot dapat berjalan lebih lancar lagi.
REFRENSI
[1] G. Lakemeyer et al. (Eds.): RoboCup 2006, LNAI 4434, pp. 491–498, 2007.
[2] CRASAR (Center for Robot Assisted Search & Rescue) (2002) : History of Rescue Robot, http://crasar.csee.usf.edu.
[3] Wikipedia Indonesia (2006) : Sejarah dan
Penyebab Terjadinya Tsunami,
http://id.wikipedia.org/wiki/Tsunami.
[4] Michel, O. (2004) Cyberbotics Ltd -
WebotsTM: Professional Mobile Robot
Simulation, International Journal of Advanced Robotic Systems, 1, 39-42, ISSN 1729-8806
[5] Legeon. S and Yawn.N.2008. Webots User
Guide. Swiss:Cyberbotics Ltd.
[6] Rachmat, Adnan. A. B (2008).Aktuatuor
Berkaki Pada Robot pencari Korban Tsunami : Algoritma Reinforcement Learning, Politeknik
Elektronika Negeri Surabaya, Surabaya. [7] ˇZlajpah, Leon. (2008) Simulation in robotics,
Mathematics and Computers in Simulation,
79, 879–897
[8] Kyriacou, T, dkk. (2008) Accurate robot
simulation through system identification, Robotics and Autonomous Systems, 56, 1082–
1093
[9] C. Pepper, S. Balakirsky, and C. Scrapper.
Robot Simulation Physics Validation.Intelligent Systems Division. National Institute of
Standards and Technology (NIST) Gaithersburg
[10] L, Vajta. T, juhasz (2005). 3D Smulation in the
Advanced Robotic Design, Test and Control.
ISSN 1726-4529 [11]http://www.bmkg.go.id/BMKG_Pusat/Geofisik a/Gempabumi.bmkg [12]http://matanews.com/2009/10/03/301-korban-belum-ditemukan/ [13]http://umum.kompasiana.com/2009/12/26/ts unami-yang-tersisa-adalah-pelajaran-5/ [14]Wikipedia.org ”gempa bumi”.http://id.wikipedia.org/wiki/gempa bumi
[15] Roehr, T. M (2008) Control of a Hierarchical
Team of Robots for Urban Serach and Rescue.
[16] Bishop, J, N. Potter, W. D.Towards. Developing
Behavior Based Control Architectures for Mobile Robots Using Simulated Behaviors