PERANCANGAN SISTEM KENDALI PADA KENDALIAN YANG
DISERTAI KETIDAK PASTIAN
Rudy S. Wahjudi
Jurusan Teknik Elektro Fakultas Teknologi Industri Universitas Trisakti E-mail: rswahjudi@trisakti.ac.id
Abstrak
Dalam merancang sistem kendali, karakteristik kendalian harus ditemukan terlebih dahulu.Apabila karakteristik kendalian tidak sesuai dengan yang dibutuhkanmaka perlu dipertimbangkan untuk membuat atau merancang pengendali. Pengendaliyang diperoleh dari hasil rancangan beserta kendalian kemudian dirangkai menjadi suatu sistem kendali yang mempunyai karakteristik sama seperti yang diinginkan. Dalam kenyataannya kendalian seringkali terganggu yang mengakibatkan karakteristiknya berubah sehingga sistem kendali secara keseluruhan juga menjadi berubah, sehingga tidak sesuai lagi dengan karakteristik yang kita harapkan. Oleh karena ituperlu
dirancang sistem kendali yang sudah mempertimbangkan adanya
kemungkinan perubahan parameter parameter penentu karakteristik kendalian. Dalam makalah ini akan dibuat perancangan sistem kendali yang dalam perancangannya sudah mempertimbangkan adanya kemungkinan perubahan parameter parameter penentu karakteristik kendalian. Hasil perancangan kemudian disimulasikan ke komputer. Simulasi dilakukan dengan mencoba pengendali hasil perancangan dengan beberapa kendalian yang mempunyai karakteristik berbeda secara bergantian. Hasil simulasi menunjukkan bahwa karakteristik sistem kendali dimana kendalian yang digunakan terdiri dari beberapa kendalian yang berkarakteristik berbeda, namun menghasilkan respon yang sama.
Kata kunci: pengendali, kendalian , simulasi, karakteristik sistem kendali.
Pendahuluan
sinyal perintah.
Studi Pustaka
Perancangan sistem kendali dengan mempetimbangkan perubahan beberapa parameter pada kendalian sudah sering dibahas namun dengan berbagai istilah diantaranya sistem kendali swatala ada juga menggunakan perancangan sistem kendali dengan memanfaatkan metode pada jaring syaraf tiruan atau fuzy. (Adel A. Ghandakly, 2013), (Fatima Tahri, Ali Tahri, Ahmed Allali and Samir Flazi, 2012), (K. Prabhu and V. Murali Bhaskaran PhD,2013), (P. Ramanathan, 2014), ( P. Singhala, D. N. Shah, B. Patel, 2014), (Qing-zhao Yang, 2015), (Ritu Shakya, Kritika Rajanwal, Sanskriti Patel and SmitaDinkar, 2014).
Semua metode perancangan sistem kendali yang disebutkan di atas prinsipnya adalah strategi pengendalinya berdasarkan pemodelan kendalian yang dilakukan secara terus menerus sehingga model kendalian selalu terbarukan sesuai dengan keadaan yang ada. Selanjutnya penalaan pengendali berdasarkan model yang terbaru. Jadi pengendali ditala berdasarkan model kendali yang terbaru, sehingga tanggapan sistem yang diinginkan tetap terjaga meskipun parameter kendalian berubah.
Secara ringkas metode perancangan sistem kendali tersebut di atas memerlukan proses identifikasi yang memerlukan pengukuran masukan dan keluaran yang adakalanya tidak mudah dibangkitkan. Pada makalah ini dibahas perancangan sistem kendali mirip dengan sistem kendali swatala namun proses identifikasi tidak dilakukan secara terus menerus. Identifikakasi hanya kalau ada perubahan parameter, sehingga tidak diperlukan pebangkit sinyal masukan dan keluaran untuk proses identifikasi.
Metodologi Penelitian
Penelitian ini dimulai dengan membuat model motor DC sebagai kendalian dalam bentuk fungsi alih motor DC. Selanjutnya dari fungsi alih yang diperoleh dapat diketahui persamaan karakteristik dari motor DC sehingga karakteristik motor DC sebagai kendalian dapat diketahui.Selanjutnya menentukan karakteristik sistem kendali yang diinginkan. Untuk mencapai karakteristik yang diinginkan kemudian menentukan pengendalinya yang dalam makalah ini dipilih pengendali PID.Seterusnya menala parameter pengendali PID yaitu P, I dan D sedemikian rupa sampai karakterik sistem dapat dicapai.
Pemodelan Kendalian motor DC
Dalam makalah ini perancangan sistem menggunakan kendalian motor DC.
Model motor DC yang akan dikendalikan ditunjukkan seperti pada gambar 1 di bawah ini
Keterangan:
:tahanan kumparan jangkar :induktor kumparan jangkar :arus jangkar
:tegangan induksi akibat putaran rotor. : tegangan motor
:kecepatan motor
Dari gambar 1 dapat diturunkan persamaan diferensial sistem (motor DC)bagian elektriknyasebagai berikut:
; ; :konstanta
=
Dari gambar 1 dapat diturunkan persamaan diferensial sistem bagian mekanik sebagai berikut:
, maka
=
=
Akhirnya dapat diperoleh fungsi alih sebagai berikut
Persamaan di atas merupakan persamaan karakteristik, dari persamaan karakteristik tersebut tampak jelas sekali bahwa karakteristik sistem tergantung dari parameter parameter seperti , , , , dan .
Untuk memudahkan dalam pelaksanaan simulasi komputer maka parameter-parameter dalam fungsi alih motor DC tersebut diberikan nilai sebagai berikut :
parameter besaran 0,05 H
0,1 0,1 1
dan 1
Dengan memasukkan semua parameter kedalam fungsi alih maka dapat diperoleh fungsi alih motor DC sebagai berikut :
Perancangan Sistem Kendali(parameter kendalian tetap)
kendalian motor DC dapat ditunjukkan pada gambar 2.
Gambar 2. Diagram blok Sistem Kendali dengan parameter kendali tetap
Perancangan sistem kendali pada kendalian yang disertai ketidakpastian. (parameter kendalian tidak tetap).
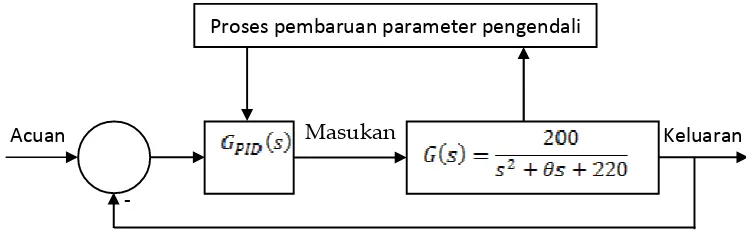
Diagram blok sistem kendali dapat ditunjukkan seperti pada gambar 3 di bawah ini
Gambar 3. Diagram blok sistem kendali dengan parameter kendali tidak tetap (berubah-ubah)
Dalam perancangan sistem kendali padakendalian yang disertaiketidakpastian(parameter kendalian tidak tetap) sama dengan sistem kendali untuk kendalian tetap namun perlu ditambah dengan satu blok fungsi yang fungsinya adalah mendeteksi parameter parameter yang diduga bisa berubah untuk digunakan sebagai data untuk menghitung kembali parameter parameter pengendali yang dalam hal ini parameter P, I dan D.
Hasil dan Pembahasan
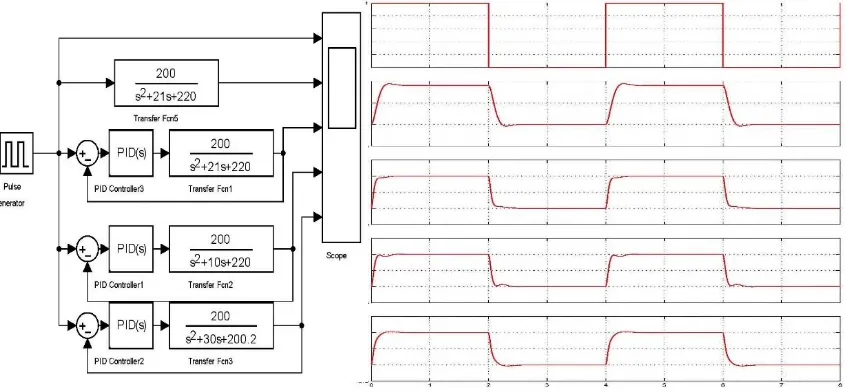
Hasil Simulasi Perancangan sistem kendali dapat ditunjukkan pada gambar 4 di bawah ini:
Proses pembaruan parameter pengendali
Acuan Masukan Keluaran
Acuan
Gambar 4.Simulasi komputer hasil perancangansistemkendalipadakendalian yang disertai ketidakpastian.
Kesimpulan
Dalam makalah ini pengendali yang digunakan adalah pengendali PID (Proposional Integral Deferensial) dengan parameter parameter pengendali P, I dan D.
Dari simulasi hasil perancangan sistem kendali dengan kendalian yang disertai ketidak pastian(ditunjukkan dengan fungsi alih yang berbeda grafik 3, 4 dan 5 dihitung dari atas) seperti yang ditunjukkan pada gambar 4, dapat disimpulkan bahwa karakteristik sistem kendali dapat dipertahankan meskipun karakteristik kendalian berubah ubah asal dimungkinkan untuk mengkoreksi parameter parameter pengendali sesuai keadaan.
Daftar pustaka
Missula Jagath Vallabhai, Pankaj Swarnkar, D.M. Deshpande, 2012, Comparative Analysis of PI Control and Model Reference Adaptive Control Based Vector Control Strategy for Induction Motor Drive”, International Journal of Engineering Research and Applications (IJERA), Vol. 2, Issue 3, pp.2059-2070
Adel A. Ghandakly, 2013,An Adaptive Self Tuning Regulator with Genetic Controller Tuning, Universal Journal of Control and Automation 1(3): 69-73.
Fatima Tahri, Ali Tahri, Ahmed Allali and Samir Flazi, 2012, The Digital Self-Tuning Control of Step a DownDC-DC Converter, Acta PolytechnicaHungarica
Karl Johan °Astr¨om and Richard Murray, 2006, Feedback Systems-An Introduction for Scientists and Engineers, p347-351
K. Prabhu and V. Murali BhaskaranPhD,2013, Optimization of a Temperature Control Loop usingSelf Tuning Regulator,International Journal of Computer Applications
P. Ramanathan, 2014, Fuzzy Logic Controller for Temperature Regulation Process, Middle-East Journal of Scientific Research. p1524-1528
P. Singhala, D. N. Shah, B. Patel, 2014,Temperature Control using Fuzzy Logic,
machining process,J. Shanghai Jiaotong Univ. (Sci.),