ILMIAH IMPLEMENTASI DAN SIMULASI DESAIN PENGENDALI PID MENGGUNAKAN METODE SIANCONE PADA STSTEM MOTOR DC
Bebas
16
0
0
Teks penuh
Gambar
+7

Dokumen terkait
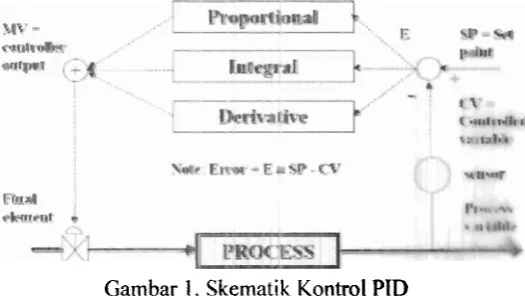
Gambar 3.1 Gambar Blok Diagram Sistem.. Sistem ini merupakan sistem pengendali level tegangan pada bagian output. Input yang berupa tegangan DC 12 volt yang didapat dari aki
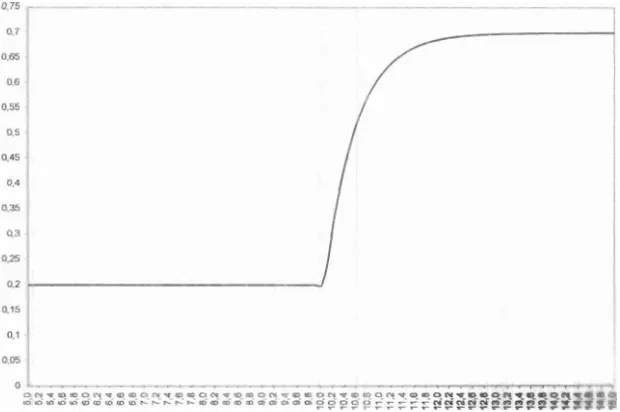
Dari gambar grafik di atas terlihat bahwa pengujian dilakukan pada range Eb/No 0 dB - 10 dB hal ini karena untuk range tersebut hasil BER yang digunakan sudah bagus
Gambar 3.1 Gambar Blok Diagram Sistem.. Sistem ini merupakan sistem pengendali level tegangan pada bagian output. Input yang berupa tegangan DC 12 volt yang didapat dari aki
Penalaan parameter kendali PID untuk mengendalikan kecepatan motor DC yang dipakai pada perancangan ini mampu memberikan respon pengendalian yang paling ideal, dengan nilai K p
Pada Gambar 3.2 terlihat analisa respon sistem pada beban minimal, nominal dan maksimal dengan pengendali hybrid SMC dan PID tidak terdapat perbedaan yang signifikan pada
Penalaan parameter kendali PI D untuk mengendalikan kecepatan motor DC yang dipakai pada perancangan ini mampu memberikan respon pengendalian yang paling ideal, dengan nilai K p =
Pada Gambar 3.2 terlihat analisa respon sistem pada beban minimal, nominal dan maksimal dengan pengendali hybrid SMC dan PID tidak terdapat perbedaan yang signifikan pada
Grafik respon kontrol PID mengatur kecepatan laju kapal dari 3 Km/jam turun menjadi 2 Km/jam Dari data grafik hasil percobaan dapat diamati respon kontrol PID pada pengaturan
