TUGAS AKHIR
Diajukan Sebagai Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun Oleh:
NICODEMUS CAHYO TRIATMONO
NIM : 005114062
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
Presented as Partial Fulfillment of Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering
By
NICODEMUS CAHYO TRIATMONO NIM :005114062
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FALCUTY
SANATA DHARMA UNIVERSITY
berharga tapi bagaimana cara kita memperolehnya
adalah sesuatu yang lebih berharga”
Kupersembahkan tugas akhir ini :
Pada Tuhan Yesus Kristus atas hidup, rahmat, penyertaan, mukjizat dan
penebusan-Nya untukku dan Bunda Maria atas doa dan bimbingan yang selama ini
menyertai langkahku.
Untuk Bapak “Pancratius krismandoko” dan Ibu “Pancratia Murpudjanti”
atas dukungan dana, doa, dan bimbingan yang tiada henti, pembelajaran atas hidup dan
kasih yang selama ini aku terima.
Untuk Kakakku dan keponakanku tersayang : Mas Budi, Mbak Retno, Mbak Sari,
Mas jimmy, steven, Krisna, Lintang. Yang kita perlukan hanyalah kebersamaan kita,
proses produksinya, di mana peralatan-peralatan tersebut memerlukan kecepatan motor tertentu sehingga alat dapat bekerja dengan baik tanpa adanya gangguan. Oleh karena itu di perlukan adanya pengendalian motor, baik yang sederhana maupun kompleks.
Pada penelitian ini, dirancang suatu alat pengendali kecepatan putar motor DC
dengan menggunakan metode Pulse width modulation (PWM). Alat ini menggunakan
dua buah sumber tegangan yang digunakan sebagai sumber catu daya PWM dan motor DC tersebut. Pengendalian kecepatan putaran motor dc ini dilakukan dengan mengatur lebar pulsa dari gelombang kotak, dimana semakin besar lebar pulsa maka semakin besar pula tegangan keluaran motor dan putaran motor semakin cepat.
Hasil dari perancangan ini adalah alat pengendali kecepatan putar motor dc 100 volt yang bekerja pada level tegangan antara 2,4 volt sampai dengan 12 volt dengan lebar pulsa dari 0 % sampai dengan 100 % dan kecepatan motor maksimum sebesar 10000 rpm.
a certain motor speed in order to work well without any possible problems occurance. Therefore, it is important to operate motor controller either the simple one or the complex one.
In this study, the researches designs a circle speed equipment of dc motor by using pulse width modulation (PWM) method. This equipment uses two energy sources that tend to be power source of PWM and dc motor. The circle speed control of dc motor is conducted by setting up the pulse width of the square wave which shows that the wider the pulse, the bigger the output of motor energy also faster the motor circle.
The result of the design is the circle speed control equipment of 100 volt dc motor are work in voltage from 2,4 volt to 12 volt with the pulse width from 0 % to 100 % and the maximum rotation speed is 10000 rpm.
rahmatnya dari awal hingga akhir penulisan ini. Tugas akhir ini merupakan salah satu
syarat yang harus ditempuh untuk memperoleh gelar sarjana teknikdi jurusan Teknik
Elektro Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
Persoalan Tugas Akhir ini adalah pengendalian kecepatan putar motor dc 100 volt
dengan menggunakan metode Pulse Width Modulation (PWM). Tugas akhir ini bertujuan
untuk mengetahui bentuk variasi kecepatan motor terhadap duty cycle.
Banyak bantuan yang penulis dapatkan dalam penyusunan tugas akhir ini, maka
boleh kiranya dengan rendah hati penulis menghaturkan banyak terimakasih kepada :
1. Allah Bapa di Surga, atas kehendak-Mu penulis dapat menyelesaikan tugas
akhir ini.
2. Bapak Martanto, S.T., M.T., selaku dosen pembimbing I yang telah
meluangkan waktunya untuk memberikan bimbingan, masukan, dan bantuan,
sehingga penulis dapat menyelesaikan tugas akhir ini.
3. Bapak Ir.,Tjendro selaku dosen pembimbing II atas bimbingan dan
bantuannya sehingga penulis dapat menyelesaikan tugas akhir ini.
4. Bapak Pancratius Krismandoko dan Ibunda Pancratia Murpudjanti yang telah
memberikan kasih dan sayangnya, doa, dorongan, semangat, biaya yang tiada
henti hingga terselesaikan studi dan penyusunan tugas akhir ini.
5. Kakak-kakakku, Mas Budi dan Mbak sari, Mas Jimmy dan Mbak Retno atas
Kontrakan, dll, terima kasih atas bantuan dan dukungannya.
8. Segenap dosen-dosen Teknik Elektro atas segala bantuan yang telah diberikan
selama penulis menimba ilmu di bangku kuliah.
9. Segenap Karyawan, Sekretariat Teknik, Laboran Teknik Elektro mas Suryo,
mas Mardi dan mas Hardi atas bantuan yang telah diberikan.
10. Dan semua pihak yang tidak dapat disebutkan satu persatu, karena
keterbatasan tempat, atas saran, ide dan dukungan yang diberikan hingga
tugas akhir ini dapat terselesaikan.
Dengan segala kerendahan hati juga, penyusun menyadari bahwa tugas akhir ini
masih sangat jauh dari sempurna. Oleh karena itu, segala kritik dan saran yang
membangun akan penyusun terima dengan senang hati.
Akhir kata penyusun mengharapkan semoga tugas akhir ini dapat berguna bagi
semua pihak dan dapat dijadikan bahan kajian lebih lanjut.
Yogyakarta, Juli 2007
\
Halaman
HALAMAN JUDUL ………. i
HALAMAN JUDUL BAHASA INGGRIS ……….. ii
HALAMAN PERSETUJUAN ………. iii
HALAMAN PENGESAHAN ……….. iv
PERNYATAAN KEASLIAN KARYA ………... v
HALAMAN PERSEMBAHAN ………... vi
INTISARI ……… vii
ABSTRACT ………... viii
KATA PENGANTAR ………. ix
DAFTAR ISI ………...…. xi
DAFTAR GAMBAR ……….. xiv
DAFTAR TABEL ….………...…... xvi
DAFTAR LAMPIRAN ………...…….. xvii
BAB I PENDAHULUAN ……….. 1
1.1 Judul ………. 1
1.2 Latar Belakang ………. 1
1.3 Perumusan Masalah ………. 2
1.4 Batasan Masalah ……….. 3
2.1.A. Pengertian Kecepatan ……….... 5
2.1.B. Jenis-jenis Kecepatan ……… 5
2.1.C. Pengertian Percepatan ………... 5
2.1.D. Jenis-jenis Percepatan ………... 6
2.1.E. Percepatan Dalam Gerak Melingkar ………. 6
2.2. Pengatur Kecepatan Putar Motor DC ………... 7
2.3. Catu daya ……….. 8
2.3.1. Catu Daya 15 Volt ……….. 9
2.3.2. Catu Daya 100 Volt ……….. 10
2.4. Pulse Width Modulation (PWM) ……… 12
2.4.1. Penguat Operasional (op-Amp) ……… 14
2.4.2. Rangkaian Pembagi Tegangan ……….. 18
2.4.3. Rangkaian Pensaklaran ………. 19
2.4.4. Rangkaian Pengatur Lebar Pulsa ……….. 21
2.5. M0tor AC / DC Universal ………... 22
2.6. Alat Pengukur Kecepatan Putar Motor DC ……… 25
BAB III PERANCANGAN PERANGKAT KERAS ………. 26
3.1 Diagram Blok Dasar Pengendalian Kecepatan Putaran Motor DC ……… 26
3.2.2 Pulse Width Modulation ……….. 31
3.2.2.1 Pembangkit Gelombang Segitiga ………. 31
3.2.2.2 Rangkaian Pembagi Tegangan ………. 33
3.2.2.3 Rangkaian Pengatur Lebar Pulsa ………. 34
3.2.2.4 Rangkaian Pensaklaran ……….... 36
BAB IV DATA dan PEMBAHASAN ……… 38
4.1 Hasil Akhir Perancangan ………. 38
4.2 Data Pengamatan ………...… 39 4.3 Pembahasan ……….. 42
4.3.1 Frekuensi 1 KHz ……….. 45
4.3.2 Frekuensi 2 KHz ……….. 53
BAB V KESIMPULAN dan SARAN ………... 56
5.1 Kesimpulan ……….. 61
5.2 Saran ……… 61
Gambar 2.1 Skema pengendalian kecepatan putar motor dc……….………. 7
Gambar 2.2 Penyearah dengan trafo tap tengah……….…….... 8
Gambar 2.3 Jembatan penyearah tegangan.……… 9
Gambar 2.4 Rangkaian catu daya 15 volt………..………...……… 10
Gambar 2.5 Rangkaian regulator seri ... 10
Gambar 2.6 Rangkaian catu daya 100 Volt ………. 11
Gambar 2.7 Bentuk pulsa PWM dengan masukan Vdc1 dan Vdc2……...………….. 13
Gambar 2.8 Bentuk gelombang segitiga dengan tegangan referensi ………..….…… 13
Gambar 2.9 Batas praktis lebar pulsa PWM ……… 14
Gambar 2.10 Pembangkit gelombang segitiga menggunakan saklar …………. 15
Gambar 2.11 Rangkaian Pembangkit Gelombang Segitiga ... 16
Gambar 2.12 Skema Pembanding dalam Tegangan Nol ... 17
Gambar 2.13 Rangkaian pembagi tegangan ... 18
Gambar 2.14 Rangkaian Pensaklaran ... 20
Gambar 2.15 Rangkaian Pengatur Lebar Pulsa ... 21
Gambar 2.16 Konstruksi Motor Universal ... 22
Gambar 2.17 Karakteristik kecepatan terhadap beban ... 23
Gambar 3.1 Diagram Blok Pengendalian Motor DC ……….….……… 26
Gambar 3.2 Rangkaian Catu Daya 15 Volt DC ………..…………. 27
Gambar 3.7 Rangkaian Pensaklaran... ………... 36
Gambar 4.1 Alat pengendali kecepatan putar motor dc ……….... 38
Gambar 4.2 Pengamatan Duty cycle dengan Vref =12 V (f =1 KHz)………...…... 40
Gambar 4.3 Pengamatan Duty cycle dengan Vref=11 V (f=1 KHz)……… 40
Gambar 4.4 Pengamatan Duty cycle dengan Vref=11 (f=1 KHz).………... 41
Gambar 4.5 Grafik Perbandingan Duty Cycle ………. 47
Gambar 4.6 Grafik Perbandingan Tegangan Motor ……… 49
Gambar 4.7 Grafik Pengaruh Duty Cycle Terhadap Kecepatan Motor ………..………….……….. 52
Gambar 4.8 Grafik Perbandingan Duty Cycle …….……… 55
Gambar 4.9 Grafik Perbandingan Tegangan Motor .…….……….. 58
Tabel 4.1 Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk
frekunsi 1 KHz.
Tabel 4.2. Perbandingan data Tegangan motor hasil pengamatan dengan
perhitungan untuk frekunsi 1 KHz.
Tabel 4.3 Pengaruh Duty Cycle terhadap kecepatan putaran Motor DC untuk
Frekuensi 1 KHz.
Tabel 4.4 Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk
frekunsi 1 KHz.
Tabel 4.5. Perbandingan Tegangan Motor hasil pengamatan dengan perhitungan
untuk frekunsi 2 KHz.
Tabel 4.6 Pengaruh Duty Cycle terhadap kecepatan putaran Motor DC untuk
DAFTAR LAMPIRAN
LAMPIRAN I :
Gambar rangkaian
LAMPIRAN II :
Tabel Data Pengamatan
LAMPIRAN III :
BAB I PENDAHULUAN
1.1. Judul
Pengendalian Kecepatan Putaran Motor DC 100 volt dengan menggunakan metode Pulse Width Modulation (PWM) Analog.
1.2. Latar Belakang
Motor di dalam suatu industri memiliki fungsi yang sangat penting, di
karenakan hampir sebagian besar industri semuanya menggunakan motor dalam salah
satu bagian prosesnya. Hal ini disebabkan mekanik-mekanik yang tersusun dari
gear-gear mesin digerakkan dengan menggunakan motor listrik. Begitu juga dengan
conveyor belt yang menggerakkan berbagai peralatan mesin juga digerakkan dengan
menggunakan motor listrik. Sistem pengendalian pada peralatan-peralatan elektronik
yang menggunakan sistem robotik juga banyak menggunakan motor listrik sebagai
penggeraknya. Peralatan-peralatan tersebut memerlukan kecepatan motor tertentu
sehingga alat dapat bekerja dengan baik tanpa adanya gangguan. Oleh karena itu di
perlukan adanya pengendalian motor, baik yang sederhana maupun kompleks.
Secara garis besar ada dua macam motor menurut catu dayanya yaitu motor
AC dan motor DC, di mana masing-masing memiliki kelebihan dan kekurangan.
Motor DC mudah cara pengendaliannya, namun dalam hal perawatan agak rumit.
Sedangkan motor AC mudah perawatannya dan biasanya dayanya besar, namun
Berdasarkan kelebihan dan kekurangan masing-masing motor tersebut, baik
motor AC maupun motor DC maka penulis lebih tertarik untuk membahas mengenai
pengendalian motor DC. Hal ini dikarenakan karena keterbatasan biaya, juga
dikarenakan kita lebih sering menjumpai pembahasan mengenai pengendalian
kecepatan motor AC daripada motor DC.
Untuk mengendalikan kecepatan motor DC cara yang paling mudah adalah
dengan mengatur besarnya nilai tegangan jangkar, yaitu dengan menggunakan
metode rangkaian Pulse Width Modulation (PWM). Rangkaian Pulse Width
Modulation ini dapat mengubah-ubah besarnya tegangan jangkar, dimana Semakin
tinggi nilai tegangan jangkar maka semakin cepat putaran yang dihasilkan oleh motor
DC.
1.3. Perumusan Masalah
Sistem pengendalian kecepatan putaran motor DC dengan menggunakan
metode Pulse Width Modulation (PWM ) adalah sistem pengaturan tegangan dan
arus yang masuk ke motor DC, yaitu dengan memberi masukan tegangan ke motor
DC berupa pulsa yang memiliki karakteristik lebar denyut (duty cycle) tertentu. Lebar
denyut akan berpengaruh pada nilai arus yang masuk ke motor DC, yang berarti
mempengaruhi kecepatan putaran motor DC. Oleh karena itu di dalam penulisan
perumusan masalah ini akan membahas tentang :
1. Bagaimana membuat suatu peralatan yang dapat menghasilkan tegangan yang digunakan sebagai sumber tegangan motor DC sebesar 100 Volt.
2. Bagaimana membuat suatu rangkaian Pulse Width Modulation (PWM) yang
1.4. Batasan Masalah
Agar tidak melebarnya pembahasan pada penulisan laporan tugas akhir, maka
masalah akan diberikan batasan-batasan yaitu :
1. Motor DC yang digunakan memiliki tegangan maksimum 100 volt.
2. Penggunaan prinsip dasar Pulse Width Modulation (PWM).
3. Putaran motor DC diukur dengan menggunakan Tachometer.
4. Menggunakan 2 buah sumber tegangan untuk motor DC dan rangkaian PWM.
1.5. Tujuan
Tujuan dilakukannyapenelitian / TA ini adalah :
1. Untuk merancang dan membuat alat pengatur kecepatan motor DC dengan
menggunakan penyulutan Pulse Width Modulation (PWM).
2. Untuk mengetahui bentuk variasi kecepatan motor terhadap duty cycle.
1.6. Manfaat
Manfaat yang diperoleh dan diharapkan dengan adanya alat ini adalah :
1. Sebagai alat pengendalian motor listrik terutama motor listrik DC yang
banyak sekali dipakai dalam industri.
2. Alat ini bisa digunakan sebagai alat bantu pada proses belajar mengajar
khususnya alat bantu praktek di laboratorium, maupun penerapannya pada
1.6. Sistematika Penulisan
Pada penulisan tugas akhir ini penulis membuat sistematika penulisan sebagai
berikut :
BAB I : PENDAHULUAN
Bab ini berisi tentang latar belakang, perumusan masalah, pembatasan
masalah, tujuan penulisan, manfaat penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi dasar teori yang berkaitan dengan bagian dari rangkaian
pengendali kecepatan putar motor dc 100 Volt.
BAB III : PERANCANGAN ALAT PENGENDALI KECEPATAN PUTAR MOTOR DC 100 VOLT
Bab ini membahas penentuan nilai-nilai komponen yang digunakan dalam
sistem pengendali kecepatan putar motor dc beserta cara kerjanya.
BAB IV : HASIL PENGUKURAN DAN PEMBAHASAN.
Bab ini membahas data hasil pengamatan yang dihasilkan oleh
rangkaian PWM yang ditampilkan dengan menggunakan osiloskop.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisi kesimpulan dan saran dari perancangan dan pembuatan
BAB II DASAR TEORI
2.1. Pengertian Kecepatan dan Percepatan 2.1.A. Pengertian Kecepatan
Kecepatan adalah perpindahan yang dialami oleh suatu obyek tiap satu
satuan waktu. Misalkan suatu obyek memiliki kecepatan 5 m/s, artinya tiap satu
second obyek mengalami perpindahan sebesar 5 m.
2.1.B. Jenis-jenis Kecepatan
1. Kecepatan Linier (Kecepatan Tangensial) Obyek Berputar
Kecepatan linier obyek yang berputar didefinisikan sebagai panjang
lintasan yang ditempuh oleh suatu obyek tiap satu satuan waktu, dimana untuk
satu putaran, lintasan obyek yang berputar sama dengan keliling lingkaran itu
sendiri.
2. Kecepatan Sudut Objek Berputar
Kecepatan sudut objek berputar atau disebut juga kecepatan anguler objek
berputar, didefinisikan sebagai besar perubahan sudut yang terjadi tiap satu satuan
waktu.
2.1.C. Pengertian Percepatan
Percepatan (acceleration) adalah perubahan kecepatan yang dialami suatu
objek tiap satu satuan waktu. Misalkan suatu objek mempunyai percepatan
2.1.D. Jenis – jenis Percepatan
1. Percepatan Objek Berdasarkan Nilainya
a. Nilai percepatan lebih besar dari nol, maka gerak dipercepat. b. Nilai percepatan sama dengan nol, maka kecepatan tetap.
c. Nilai percepatan kurang dari nol, maka gerak diperlambat.
2. Percepatan Objek Berdasarkan Lintasannya
a. Gerak lurus berubah beraturan (Glbb)
Mempunyai ciri-ciri :
1. Lintasannya lurus
2. Kecepatannya berubah secara beraturan.
3. Percepatannya tetap.
b. Gerak melingkar berubah beraturan (gmbb)
Mempunyai ciri-ciri :
1. Lintasannya berupa lingkaran.
2. Kecepatannya berubah secara beraturan.
3. Percepatannya tetap
2.1.E. Percepatan Dalam Gerak Melingkar
Beberapa jenis percepatan di dalam gerak melingkar adalah sebagai
berikut:
1. Percepatan Sentripetal
Percepatan ini terdapat pada semua jenis gerak melingkar. Percepatan
sentripetal bukan berfungsi mengubah kecepatan sudut namun berfungsi
menuju ke pusat, atau dinamakan percepatan radial karena arahnya berhimpit
dengan jari-jari (radius).
2. Percepatan Sudut (Percepatan Anguler)
Percepatan ini terdapat dalam gerak melingkar selain gerak melingkar
berubah beraturan. Percepatan sudut berhubungan dengan perubahan kecepatan
sudut.
3. Percepatan Linier (Pecepatan Tangensial)
Di dalam gerak melingkar selalu terdapat hubungan antara besaran anguler
dengan besaran linier yang nilainya sebanding. Jika dalam gerak melingkar
terdapat percepatan sudut, maka percepatan sudut tersebut mengakibatkan
percepatan liniernya.
2.2. Pengatur Kecepatan Putaran Motor DC
Pengatur kecepatan dilakukan dengan memberikan tegangan yang variabel
pada motor DC. Pengaturan lebar pulsa akan memberikan efek seperti pengaturan
tegangan variabel. Diagram Blok dari pengaturan kecepatan putaran motor DC
tampak pada gambar 2.1.
Gambar 2.1. Skema Pengendalian Kecepatan Putaran Motor DC
Motor Sumber AC Catu Daya
Catu Daya PWM
2.3. Catu daya
Agar rangkaian elektronika bekerja dengan baik maka diperlukan catu daya,
tetapi catu daya memiliki keterbatasan mengenai berapa besar daya yang dapat
dihasilkannya untuk membuat rangkaian elektronika dapat bekerja dengan baik. Hal
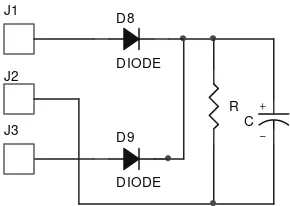
ini menyangkut tahanan dalam catu daya. Rangkaian penyearah gelombang penuh
dengan transformator pada dasarnya dapat dianggap sebagai suatu rangkaian
penyearah yang terdiri dari dua rangkaian penyearah setengah gelombang yang
bekerja secara bergantian. Tegangan DC yang diperoleh dari penyearah gelombang
penuh masih belum rata, akan tetapi berbentuk gelombang sinus yang selalu positif
(Searah). Untuk mendapat tegangan yang lebih rata, maka setelah keluar dari
penyearah, tegangan tersebut akan dilewatkan melalui suatu filter. Filter yang paling
sederhana adalah filter kapasitor. Rangkaian penyearah dengan filter kapasitor
terdapat dalam gambar 2.2.
J1
J2
-+
J3
R C D9
DIODE D8
DIODE
Gambar 2.2. Penyearah dengan Trafo Tap Tengah
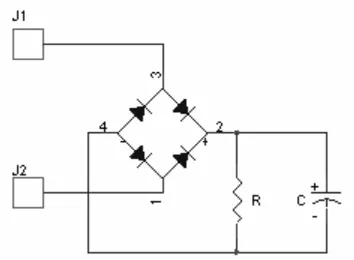
Selain menggunakan trafo tap tengah, dapat pula menggunakan empat buah diode
Gambar 2.3. Jembatan Penyearah Tegangan
Untuk memperoleh tegangan penyearah yang cukup konstan pada suatu harga,
dapat di buat suatu penyearah tegangan dengan menggunakan dioda. Kita dapat
membuat berbagai macam rangkaian penyearah, misalnya rangkaian penyearah
dengan tapis yang berfungsi untuk meratakan tegangan keluaran.
Adanya hambatan keluaran transformator yang menyebabkan hilangnya atau
turunnya tegangan keluaran dapat kita hindari dalam batas-batas arus beban tertentu.
Untuk tujuan tersebut kita dapat memasang dioda zener dalam rangkaian catu daya.
Jadi kita dapat membuat penyearah gelombang dengan menggunakan, dioda,
kapasitor, dan dioda zener dengan berbagai macam desain.
2.3.1. Catu Daya 15 Volt
Di dalam pengendalian kecepatan putaran Motor DC, rangkaian Catu Daya 15 volt menggunakan metode penyearah gelombang penuh model
jembatan. Dua diode akan berkondusi (berpanjar mundur) saat isyarat positif
dan dua diode akan berkonduksi (berpanjar maju) saat isyarat negatif.
polaritas tegangan yang terjadi pada masukan. Untuk lebih jelasnya perhatikan
gambar 2.4.
J1
J2
J4
GND J3
- +
1
2
3
4
U1 LM7815/TO
1
3
2 VIN
GN
D
VOUT
C1 C2 C3
LED
R
Gambar 2.4. Rangkaian Catu Daya 15 Volt
2.3.2. Catu Daya 100 Volt
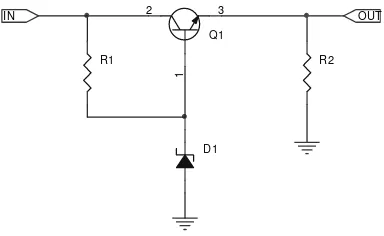
Di dalam rangkaian catu daya untuk tegangan keluaran maksimal
V
15
± dc, maka kita dapat menggunakan rangkaian regulator dalam bentuk
kemasan IC. Namun, apabila kita ingin merancang sebuah catu daya dengan
tegangan keluaran tinggi, maka kita dapat menggunakan rangkaian regulator
seri. Sebuah rangkaian regulator seri sederhana yang terdiri atas komponen
dioda zener, hambatan dan sebuah transistor dapat di lihat pada gambar 2.5.
R2
OUT
Q1
1
2 3
R1
D1
IN
Untuk mencari besarnya tegangan antara kaki kolektor dan kaki emitor
didapat dengan persamaan 2.1.
Vo Vi
VCE = − ... (2.1)
Sedangkan untuk mencari tegangan keluaran dari catu daya didapat dengan
persamaan 2.2.
BE
V Vz
Vo= − ... (2.2)
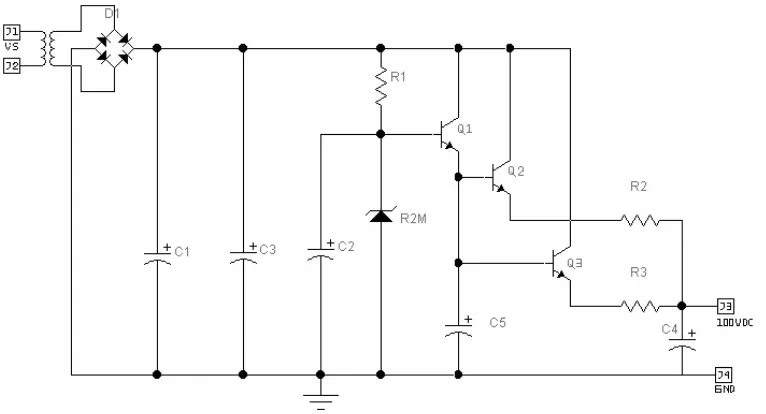
Dengan menggunakan rangkaian regulator seri seperti pada gambar 2.5,
maka dapat di buat rangkaian yang digunakan sebagai sumber tegangan 100
Volt seperti terlihat pada gambar 2.6.
Berdasarkan gambar rangkaian di atas, maka dapat mencari besarnya arus
pada dioda zener menurut persamaan 2.3.
1
R V V
IZ = I − Z ... (2.3)
Sedangkan untuk mencari besarnya arus emitor pada catu daya dapat dicari
menurut persamaan 2.4.
3 2 E E
E I I
I = + ... (2.4)
2.4. Pulse Width Modulation (PWM)
PWM merupakan rangkaian yang menghasilkan variasi pulsa untuk masukan
DC yang bervariasi. Dengan PWM akan didapatkan nilai duty cycle yang
berubah-ubah tergantung dari masukan DC-nya. Pada prinsipnya PWM ini membandingkan
tegangan segitiga yang berperiode konstantertentu dengan perbandingan periode
on-off yang berubah, yaitu berupa tegangan referensi. Misalkan suatu gelombang
segitiga dibandingkan dengan tegangan referensi sebesar Vdc1 yang berpolaritas
positif maka akan dihasilkan gelombang kotak dengan duty cycle diatas 50 % dan jika
dibandingkan dengan tegangan Vdc2 yang berpolaritas negatif maka akan
menghasilkan duty cycle dibawah 50 %. Untuk lebih jelasnya mengenai rangkaian
Vdc1
0
Vdc2
Vsat
Vsat
Gambar 2.7 Bentuk pulsa PWM dengan masukan Vdc1 dan Vdc2
Berdasarkan gambar 2.7, maka kita dapat mencari besarnya nilai duty cycle
dengan menggunakan metode phytagoras, yaitu dengan membandingkan antara
tegangan referensi dengan gelombang segitiga. Untuk lebih jelasnya perhatikan
gambar 2.8 .
Vcc
Vpp
Vref
0
1/2Toff Ton T
Gambar 2. 8. Bentuk gelombang segitiga dengan tegangan referensi
Berdasarkan gambar 2.8 . maka dapat di peroleh persamaan 2.5 .
Toff T
Vref Vpp
2 1
2 1
Sehingga :
Toff Ton
Ton
+ =
δ ... (2.6)
Satu hal penting yang harus diperhatikan pada PWM ini adalah bahwa variasi
lebar pulsa mempunyai batas secara praktiknya, dimana lebar pulsa tidak bisa
melebihi jarak antar pulsa. Apabila ini terjadi maka akan terjadi saling menutupi dan
akan terjadi hubungan yang sebanding antara lebar pulsa dengan amplitudo sinyal
yang tidak panjang. Ketika lebar pulsa negatif menjadi tidak berarti, maka sebagian
besar ayunan negatif pada sinyal yang dicontohkan bisa untuk memproduksi lebar
pulsa nol. Hal yang perlu diperhatikan juga dalam PWM ini adalah bahwa lebar pulsa
terlebar tidak akan melebihi 80 % dari lebar pulsa maksimum, dan lebar pulsa
tersempitnya tidak akan kurang dari 20 % dari lebar pulsa maksimumnya. Hal ini
dapat ditunjukkan pada gambar 2.9.
Gambar 2.9. Batas Praktis Lebar Pulsa PWM
2.4.1. Penguat Operasional (Op-amp)
Op-amp mempunyai lima terminal dasar : dua untuk mensuplai daya, dua untuk isyarat masukan, dan satu untuk keluaran. Dalam pengendalian kecepatan
putaran motor DC ini, rangkaian Pulse Width Modulation (PWM) membutuhkan
A m p l i t u d o
Maximum Possible Pulse Width (100%)
Mini mum Pract ical( 20%) Maximum
penguat operasional sebagai pembangkit segitiga serta sebagai pembanding
(Comparator).
1. Pembangkit Gelombang Segitiga (Triangle Wave Generator)
Menurut Robert F. Coughlin dan Frederick F. Driscoll (1985), pembangkit gelombang segitiga yang memerlukan dua buah op amp
pengertiannya bisa disederhanakan jika kita ikuti dalam tiga langkah yang logis.
Pertama, memperlihatkan bagaimana gelombang segitiga dasar dapat
dibangkitkan dengan menggunakan tangan oleh satu op-amp, sebuah tahanan,
sebuah kapasitor, dan sebuah saklar. Kedua, memilih pembanding untuk
menggantikan cara kerja pada saklar yang menggunakan tangan. Ketiga,
menyatukan pembanding dan pembangkit gelombang segitiga dasar terbuat
bersama-sama. Sebuah pembangkit gelombang segitiga yang dikendalikan tangan
dapat dibuat dengan menambahkan satu saklar dan tegangan pengendali DC lain
ke pembangkit tanjakan tunggal. Untuk lebih jelasnya dapat kita lihat pada
gambar 2.10.
Gambar 2.10. Pembangkit Gelombang Segitiga menggunakan Saklar
Untuk membuat cara kerja saklar pengendalian itu menjadi otomatis,
menghubungkan masukan (input) dari pembanding tersebut ke keluaran (output)
dari pembangkit tanjakannya. Untuk lebih jelasnya perhatikan gambar 2.11.
Gambar 2.11. Rangkaian Pembangkit Gelombang Segitiga
Frekuensi dari pembangkit gelombang segitiga tergantung pada perubahan
keluaran integrator, yaitu perubahan dari tegangan ambang atas menuju tegangan
ambang bawah. Ini berarti tergantung pada nilai hambatan dan kapasitor yang
digunakan pada integrator. Untuk mencari nilai dari tegangan ambang
pembangkit gelombang segitiga dapat kita lihat pada persamaan 2.7.
⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ ± =
4 5
R R Vsat
Vthreshold ... (2.7)
Pada persamaan 2.7, nilai dari Vsat dapat berarti Vsat+ atau Vsat- ( dalam
perancangan ini nilai Vsat- = 0). Sedangkan untuk mencari nilai tegangan puncak
ke puncak dapat dilihat pada persamaan 2.8.
⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ × × = −
4 5 2
R R Vsat p
Sedangkan untuk mencari besarnya nilai frekuensi dapat diperoleh melalui persamaan 2.9.
C R R
R ftriangle
3 5
4 4
= ... (2.9)
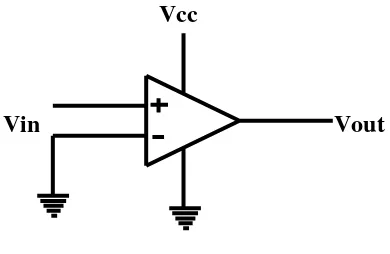
2. Pembanding (Comparator)
Pembanding adalah suatu rangkaian dengan dua tegangan masuk (tak
membalik dan membalik) dan satu tegangan keluaran. Apabila tegangan tak
membalik lebih besar daripada tegangan membalik, maka pembanding akan
menghasilkan tegangan keluaran yang tinggi. Bila masukan tak membalik lebih
kecil daripada masukan membalik, maka keluarannya akan rendah.
Cara yang paling sederhana untuk membuat sebuah pembanding adalah
dengan memasang Op-amp tanpa hambatan umpan balik seperti yang ditunjukkan
pada gambar 2.12.
Vcc
Vin Vout
Gambar 2.12. Skema Pembanding dalam Tegangan Nol
Pada gambar 2.12. jika ada tegangan masuk pada masukan tak membalik
yang amat kecil sudah cukup membuat op-amp menjadi jenuh. Misalnya, apabila
tegangan catu berharga 15 V, maka tegangan keluaran berkisar antara 0 V
Dengan demikian, tegangan masuk yang dibutuhkan untuk menghasilkan
kejenuhan positif dapat dicari menurut persamaan 2.10.
A V
Vtn=13 ...………... (2.10)
Misal A = 100000, maka besar Vin :
mV V
Vin 0,13
100000 13
=
=
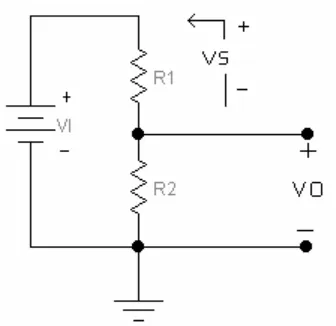
2.4.2 Rangkaian pembagi Tegangan
Rangkaian pembagi tegangan biasanya digunakan untuk memperoleh
tegangan yang diinginkan dari suatu sumber yang besar. Gambar 2.13
memperlihatkan bentuk sederhana dari rangkaian pembagi tegangan, yaitu
diinginkan untuk mendapatkan tegangan keluaran Vo yang merupakan bagian dari
sumber VI dengan memasang dua resistor R1 dan R2. Untuk lebih jelasnya
perhatikan gambar 2.13.
Berdasarkan gambar 2.1. Nampak bahwa arus i mengalir lewat R1 dan R2,
sehingga :
Vs Vo
Vi= + ... (2.11)
1
R i
Vs= × ... (2.12)
2
R i
Vo= × ... (2.13)
(
i R2) (
i R2)
Vi= × + × ... (2.14)
Dari persamaan 2.12 dan 2.14 diperoleh persamaan 2.15.
1 2
R R V V
S O =
... (2.15)
Nampak bahwa tegangan masukan terbagi menjadi dua bagian (Vo , Vs),
masing – masing sebanding dengan harga hambatan yang dikenai tegangan
tersebut. Dari persamaan 2.13 dan 2.114 kita peroleh persamaan 2.16.
(
1 2)
2R R
R V
Vo i
+
×
= ... (2.16)
Rangkaian pembagi tegangan adalah sangat penting sebagai dasar untuk
memahami rangkaian DC atau rangkaian elektronika yang melibatkan berbagai
komponen yang lebih rumit.
2.4.3. Rangkaian Pensaklaran
Pada dasarnya rangkaian pensaklaran tergantung pada harga β, maka
Dengan menggunakan pasangan darlington dapat memberikan hambatan masukan
yang lebih tinggi, dapat menurunkan efek dari hambatan sumber pada penguatan
dan hambatan keluaran. Untuk mencapai maksud tersebut, maka bisa dilakukan
dengan menghubungkan dua transistor seperti yang terlihat pada gambar 2.14.
Gambar 2.14. Rangkaian Pensaklaran
Apabila besar arus dari kaki kolektor nilai β diketahui, maka nilai R6 dapat
dicari menurut persamaan 2.17 dan 2.18.
B C
I I
=
β ... (2.17)
Sehingga :
B BE
I V V
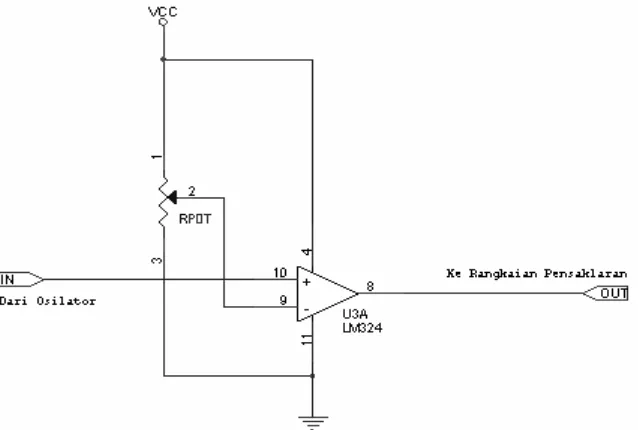
2.4.4. Rangkaian Pengatur Lebar pulsa
Di dalam pengendalian kecepatan putaran motor DC ini, rangkaian pengatur lebar pulsa berfungsi sebagai pembanding antara tegangan keluaran dari
osilator dengan tegangan dari Vcc. Sebuah rangkaian pengatur lebar pulsa yang
terdiri dari sebuah potensiometer dan rangkaian op-amp dapat di lihat pada
gambar 2.14.
Gambar 2.15. Rangkaian Pengatur Lebar Pulsa
Berdasarkan gambar 2.15. untuk mencari tegangan referensi pada pin 9
(Vref) dapat diperoleh berdasarkan persamaan 2.19.
(
)
Vcc R
R R V
pot ref pot
ref ×
−
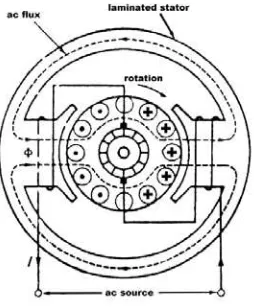
2.5. MOTOR AC / DC UNIVERSAL
Motor adalah suatu mesin listrik yang menghasilkan gerak mekanis dengan
prinsip electromagnetik. Motor AC / DC universal atau yang sering disebut sebagai
motor AC atau DC seri ini adalah motor yang dalam bekerjanya dapat disuplai
dengan menggunakan baik arus AC maupun DC. Motor ini memiliki konstruksi yang
hampir sama dengan konstruksi motor AC pada umumnya. Motor ini terdiri dari
stator sebagai pembangkit putaran fluk, dan rotor sebagai magnet putarnya. Bentuk
konstruksi dari motor universal ini dapat dilihat pada gambar 2.16.
Gambar 2.16. Konstruksi Motor Universal
Karakteristik operasi dari motor universal ini adalah sama seperti pada operasi
motor dengan arus DC dimana torsi startnya tinggi dan kecepatan yang sangat tinggi
akan membahayakan jika beban motor dilepas. Motor universal memiliki putaran
yang sangat tinggi yaitu antara 1500 sampai 15000 rpm jika dibebankan pada
peralatan-peralatan rumah tangga, apalagi saat kondisi tanpa beban maka kecepatan
disuplai dengan arus AC dibanding dengan suplai dengan arus DC sehingga biasanya
dalam operasinya motor universal diberi kopel langsung dengan beban. Karakteristik
kecepatan terhadap beban yang dikopel dapat dilihat dari gambar 2.17.
Kecepatan tanpa beban
rpm
Kecepatan pada beban penuh
Beban
Gambar 2.17 Karakteristik kecepatan terhadap beban
Motor universal dapat dibedakan menjadi dua macam yaitu :
1. Kutub terpusat, menggunakan sepatu kutub, tanpa kumparan kompensasi
sehingga memiliki kekuatan yang rendah. Jenis ini memiliki pelat-pelat dinamo
pada inti kutubnya, kumparan rotor sama seperti kumparan motor DC, dan alur
rotor dapat dibuat sejajar dengan poros atau miring.
2. Kutub terbagi, yaitu dengan kumparan stator seri fase biasanya dilengkapi
kumparan kompensasi sehingga memiliki kekuatan yang tinggi. Pada jenis ini
kumparan magnet sama seperti kumparan stator satu fase dan kumparan rotor
seperti kumparan motor DC.
Menurut Djemari Mardapi (1980), cara mengatur kecepatan motor AC/DC
umumnya, yaitu dengan memperhatikan rumus pada persamaan 2.20 dan persamaan
2.21.
Φ =
C Er
n ...………. (2.20)
Dengan : n = Kecepatan (rpm)
Er = GGL/Teg.jala-jala motor (volt)
Φ = fluk perkutub (Wb)
Ρ
= f
n 120 ... (2.21)
Dengan : n = besar keceptan (rpm)
ƒ = frekuensi (Hz)
P = jumlah kutub
Motor universal banyak diaplikasikan pada peralatan-peralatan rumah tangga
seperti motor mesin jahit, motor bor, mixer, motor vacum cleaner, serta peralatan
dapur dan portabel lainnya.
Pengendalian yang lain juga dapat dilakukan pada motor universal, contohnya
saja untuk membalik arah putaran motor yaitu dengan menukar kawat yang
dihubungkan ke sikat-sikat motor, dan pengendalian-pengendalian yang lain misalnya
softstart dan soft stop motor.
Spesifikasi Motor Universal :
Daya Motor = 120 Watt
Arus Motor = 1 A
2.6. Alat Pengukur Kecepatan Putaran Motor DC
Alat pengukur kecepatan putaran motor merupakan pelengkap dari sistem
yang dirancang, yaitu untuk memudahkan dalam pengamatan. Perubahan kecepatan
putaran motor yang dihasilkan dengan mengubah nilai setting point pada pemilih
level kecepatan, akan menyebabkan perubahan angka (decimal) yang ditampilkan.
Penampil akan menampilkan kecepatan motor dalam tiga digit, yaitu sepersepuluh,
satuan dan puluhan.
Pada pengendalian kecepatan putaran motor DC 100 Volt ini, penulis
menggunakan tachometer sebagai alat untuk mengukur kecepatan putaran motor.
Prinsip kerja alat ini sama dengan LED biasa. Saat menghantar arus LED infra merah
juga memancarkan cahaya. Perbedaan cahaya yang dipancarkan berupa cahaya tidak
tampak, sedangkan pada LED biasa cahaya yang dipancarkan berupa cahaya tampak.
Informasi yang ditampilkan pada tachometer sangat tergantung pada kecepatan motor
DC tersebut. Apabila sebuah motor DC memiliki nilai percepatan besar, artinya
perubahan kecepatan yang dialami oleh kendaraan tiap satu satuan waktu memiliki
BAB III
PERANCANGAN PERANGKAT KERAS
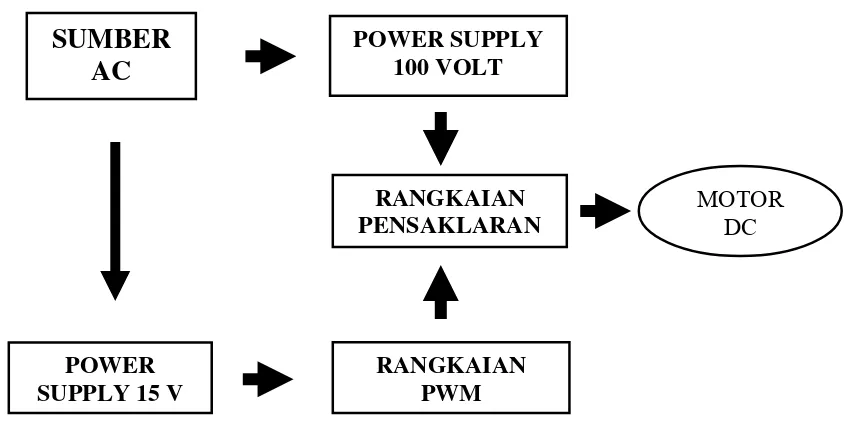
3.1. Diagram Blok Dasar Pengendalian Kecepatan Putaran Motor DC
Sistem pengendali kecepatan putaran motor DC ini menggunakan metode
PWM, dengan cara melakukan perubahan terhadap duty cyle. Keluaran dari
pembangkit PWM digunakan sebagai Pemicu driver / penggerak motor DC. Proses
dalam membuat alat ini memerlukan suatu konsep yamg merupakan bagian-bagian
dalam pembuatan alat, terutama konsep bagian-bagian dari alat yang harus dipenuhi
sehingga rancang bangun dari alat dapat terpenuhi seluruhnya.
Secara keseluruhan sistem tersebut dapat digambarkan dalam diagram kotak seperti
terlihat pada gambar 3.1.
Gambar 3.1 Diagram Blok Pengendalian Motor DC
MOTOR DC
SUMBER
AC
POWER SUPPLY 15 V
POWER SUPPLY 100 VOLT
3.2. Perancangan Perangkat Keras 3.2.1 Catu Daya
Rangkaian catu daya yang digunakan bekerja dengan menggunakan
sumber yang berasal dari PLN sebesar 220 Volt AC. Sumber tegangan yang di
butuhkan ada dua, yaitu catu daya dengan tengangan keluaran sebesar 100 Volt
DC sebagai sumber catu daya motor dan catu daya dengan tegangan keluaran
sebesar 15 volt DC sebagai sumber catu daya Pulse width Modulation(PWM)
3.2.1.1. Catu Daya 15 Volt
Di dalam rangkaian Pulse width Modulation (PWM), catu daya 15 volt digunakan untuk mensuplai tegangan op amp. Gambar rangkaian catu daya 15
Volt dapat dilihat pada gambar 3.2.
J2
18V AC J1
18V AC
J3
+15V
J4
GND
- +
1
2
3
4
U1 LM7815/TO
1
3
2
VIN
GN
D
VOUT
C2 1000 uF/50V
C3 47 uF/50V C1
4700 uF/50V
LED
1K3 R
Sebagai indikator pada catu daya 15 Volt, kita dapat menggunakan LED. LED
akan menyala jika mendapat tegangan 1,8 Volt. Apabila tegangan maju untuk
LED lebih besar dari 1,8 Volt, maka diperlukan adanya resistor sebagai pembagi
tegangan.
Keluaran IC LM 7815 15 Volt
Vresistor = (15 volt – 1,8 volt) = 13,2 volt
Arus yang melalui resistor = Arus LED = 10 mA
Besarnya hambatan :
I Vresistor R=
mA volt
10 2 , 13 =
= 1K3 Ω
3.2.1.2. Catu Daya 100 Volt
Pada rangkaian catu daya 100 volt ini, memiliki rangkaian yang hampir
sama dengan rangkaian catu daya 15 Volt DC, yaitu dengan menggunakan
penyearah model jembatan. Perbedaan antara kedua rangkaian ini hanya terletak
pada transistor dan dioda zener yang terdapat pada catu daya 100 Volt DC. Pada
Jembatan penyearah tegangan ini dua diode akan berkonduksi pada saat isyarat
positif dan akan berkonduksi pada saat isyarat negatif. Selain dapat merakit
sendiri secara manual, untuk catu daya yang menggunakan jembatan penyearah
tegangan ini, biasanya rangkaian jembatan empat diode ini dapat ditemukan di
masing-masing bentuk mempunyai dua terminal masukan AC dan dua terminal
masukan DC, seperti yang terlihat pada gambar 3.3.
Gambar 3.3 Rangkaian Catu Daya 100 Volt DC
Pada Rangkaian Catu Daya 100 Volt DC, kita menggunakan Dioda Zener
yang berfungsi untuk mencegah terjadinya drop tegangan apabila Catu Daya di
hubungkan dengan beban. Agar stabil pada tegangan 100 Volt, maka kita dapat
menggunakan dioda zener 100 Volt dengan daya sebesar 1 watt, yang
dihubungkan pada kaki basis transistor. Sehingga besar arus yang mengalir pada
dioda zener dapat di cari dengan cara :
I V P= ×
1watt =100V×I
Untuk mencari besarnya arus basis pada kaki transistor Q1 dapat di cari
dengan cara :
1
R V V
I I Z
B − =
(
)
Ω − × = 3 3 100 2 85 k IB= 6,1 mA
Setelah kita mengetahui besarnya nilai IB, kita dapat mencari besarnya
nilai IC1berdasarkan data sheet. Untuk lebih jelasnya perhatikan perhitungan di
bawah ini :
1 1
1 B
C I
I =β ×
mA 1 , 6 10× =
=61mA
(
IC1 ≈IE1)
Maka : 2 1 3 2 E B B I I
I = =
= 2 61mA mA 5 , 30 = Sehingga :
(
2)
23
2 E 1 B
E I I
I = = β +
mA 5 , 30 21× =
Berdasarkan perhitungan di atas maka besarnya arus emitter total
( )
IE adalah :3 2 E E
E I I
I = +
= 640,5 mA + 640,5 mA
= 1,281 A
3.2.2. Pulse Width Modulation (PWM)
3.2.2.1. Pembangkit Gelombang Segitiga
Rangkaian yang digambarkan disini dapat mengatur kecepatan motor
DC dengan kenaikan arus beberapa ampere. Rangkaian ini menggunakan
tegangan catu daya 15 Volt dan bekerja dengan menggunakan gelombang kotak,
dengan variabel perbandingan on ke off, rata-rata waktu on dapat diatur dari 0%
sampai 100%.
Besarnya nilai hambatan R4 di dapat dari persamaan :.
4 5 2
R R Vsat p
Vp− = × ×
Jika besar tegangan Vsat, Vp-p dan salah satu hambatan diketahui, maka
besar hambatan R4 ditentukan dengan persamaan :
p Vp
R Vsat R
− × ×
= 5
Jika diketahui :
Vsat =14 Volt, Vp-p = 10 Vp-p, dan R5 = 100 KΩ
p Vp K R − Ω × = 10 100 14 4
=140KΩ
Dengan menentukan nilai C = 10 μF, maka kita dapat menentukan besar
nilai Hambatan R3 untuk frekuensi 1 Khz :
C ftriangle R R R × = 1 4 4 6 F KHz K K μ 10 1 100 4 280 × × Ω × Ω =
=35KΩ
Sedangkan untuk frekukensi 2 KHz maka besarnya nilai hambatan R3
adalah : C ftriangle R R R × = 1 4 4 5 F KHz K K μ 10 2 100 4 140 × × Ω × Ω =
=17,5KΩ
Setelah kita mengetahui besar nilai hambatan R2 dan R3, maka kita telah
dapat merancang sebuah rangkaian pembangkit gelombang segitiga. Rangkaian
tegangan +Vsat = +15 Volt dan –Vsat = 0 Volt. Untuk lebih jelasnya mengenai
rangkaian pembangkit gelombang segitiga ini dapat kita lihat pada gambar 3.4.
.
Gambar 3.4 Rangkaian Pembentuk Gelombang Segitiga
Rangkaian PWM memerlukan osilator untuk pengoperasian dan
menggunakan potensiometer untuk mengatur variasi lebar pulsa untuk beban kecil
dan besar. Sebagai bagian dari rangkaian pembangkit variabel lebar pulsa, maka
kita dapat menambahkan Comparator (U3A).
3.2.2.2. Rangkaian Pembagi Tegangan
Rangkaian pembagi tegangan ini berfungsi sebagai sumber catu daya untuk osilator. Besar tegangan Vout didapat dengan persamaan :
Vin R R
R
Vout ×
+ =
2 1
Jika besar tegangan Vout, Vin, dan salah satu hambatan diketahui. Maka besar
salah satu hambatan lainnya ditentukan.
Gambar rangkaian pembagi tegangan dapat dilihat pada gambar 3.5.
Gambar 3.5 Rangkaian Pembagi Tegangan
Jika diketahui :
Vin = 15 V, Vout = 7,5V, R2 = 100 K
K V
K
R 100
5 , 7
15 100
1 −
× =
K K
R1 =200 −100
=
1
R 100 K
Jadi nilai hambatan R1 yang digunakan sebesar 100 K
3.2.2.3. Pengatur Lebar Pulsa
Gambar 3.6 Rangkaian Pengatur Lebar Pulsa
Saat nilai Rpot = 0, maka besarnya tegangan pada kaki inverting adalah :
(
)
Vcc R
R R V
pot ref pot
ref ×
− =
(
)
VK K
15 100
0 100
× − =
= 15 Volt
Saat nilai Rpot = 100 K, maka besarnya tegangan pada kaki inverting adalah :
(
)
VccR R R V
pot ref pot
ref ×
− =
(
)
VK k K
15 100
100 100
× −
=
Sinyal pada kaki non inverting (dari osilator) akan dibandingkan dengan
tegangan pada kaki inverting. Hasilnya berupa pulsa dengan lebar pulsa
tergantung dari hasil perbandingan antara tegangan sumber (Vcc) dan tegangan
referensi (Vref).
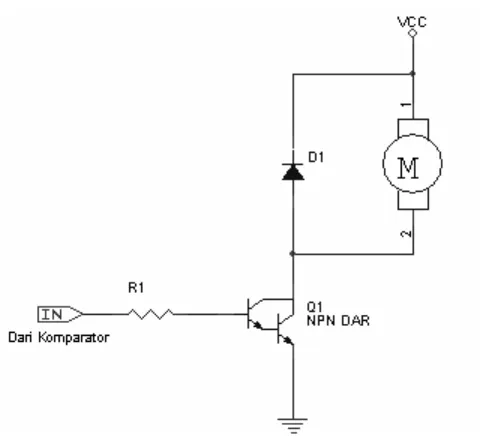
3.2.2.4. Rangkaian Pensaklaran
Rangkaian pensaklaran memakai sebuah transistor darlington NPN BD
679. Sedangkan fungsi dari pemasangan diode adalah sebagai pengaman
transistor apabila terjadi arus balik yang besar. Untuk lebih jelasnya perhatikan
gambar 3.7.
VCC
Q1 BD 679
1
2
R6 10 K
1n4007
Dari Komparator
M
Gambar 3.7 Rangkaian Pensaklaran
Tegangan maksimal dari komparator sebesar 15 Volt, sedangkan keluaran arus
motor sekitar 1 A dan berdasarkan data Sheet nilai ß = 750, sehingga :
B
I Ic
=
B
I mA
1
750=
IB = 1,3mA
Sehingga nilai R6 dapat ditentukan :
B BE
I V V R6 = −
mA V V
3 , 1
5 , 2
15 −
=
= 9615,385 Ohm
BAB IV
DATA DAN PEMBAHASAN
4.1. Hasil Akhir Perancangan
Pada bab sebelumnya telah dijelaskan mengenai beberapa perancangan yang
digunakan dalam membuat alat pengendali kecepatan putar motor dc. Bab ini akan
akan menampilkan data hasil pengamatan yang ditampilkan dalam bentuk gambar
dan tabel. Selain itu, bab ini juga disertai pembahasan mengenai data hasil
pengamatan dengan membandingkan dengan data hasil perhitungan secara teori yang
kemudian ditampilkan dalam bentuk tabel dan grafik.
Di bawah ini akan ditampilkan gambar sistem alat pengendali kecepatan
putar motor dc beserta cara pengoperasiannya. Untuk lebih jelasnya perhatikan
gambar 4.1.
Gambar 4.1. Alat pengendali kecepatan putar motor dc
Cara pengoperasian alat :
Berdasarkan gambar 4.1. Berikut akan dijelaskan bagaimana cara
1. Pertama-tama, hubungkan rangkaian pulse width modulation (PWM) dan
rangkaian motor ke rangkaian catu daya 100 volt dan catu daya 15 volt yang
tersambung dengan jala-jala listrik 220 volt. Kemudian hubungkan pula
rangkaian PWM tersebut dengan rangkaian osiloskop digital. Setelah
terhubung, kemudian tekan tombol power untuk menghidupkan alat tersebut.
2. Di dalam alat pengendali kecepatan putaran motor dc untuk mengatur lebar
pulsa gelombang kotak, dapat di lakukan dengan memutar potensiometer.
Semakin besar nilai tegangan referensi maka semakin kecil nilai dari duty
cycle tersebut.
3. Untuk mengetahui besarnya tegangan motor dc dapat menggunakan
multimeter digital sedangkan untuk mengetahui besarnya kecepatan putaran
motor dc dapat diketahui dengan melakukan pengukuran dengan
menggunakan tachometer. Semakin besar nilai duty cycle maka semakin
besar pula tegangan motor dc dan kecepatan putar motor dc tersebut.
4.2. Data Pengamatan
Di dalam percobaan ini dilakukan pengamatan terhadap 2 (dua) macam
frekuensi yang berbeda, yaitu pada frekuensi 1 KHz dan frekunsi 2 KHz. Di dalam
melakukan pengamatan, alat mulai bekerja pada level tegangan referensi antara 2,4
Volt sampai dengan 12 Volt. Agar dapat mencapai ketelitian yang tinggi, maka
dilakukan pengamatan dengan tingkat ketelitian sebesar 0,2 Volt untuk tiap masing –
masing frekuensi. Di bawah ini akan di tampilkan gambar hasil pengamatan dengan
menggunakan osiloskop digital. Untuk data hasil pengamatan secara lengkap
Gambar 4.2. Pengamatan Duty cycle dengan Vref =12 V (f =1 KHz)
Berdasarkan gambar 4.2. Kita dapat mengetahui bahwa untuk tegangan referensi 12
Volt kita belum dapat membedakan antara periode waktu on dan periode waktu off
sehingga kita belum dapat mencari besarnya nilai duty cycle(δ = 0 %).
Gambar 4.3. di atas merupakan hasil pengamatan dengan meggunakan
osiloskop digital untuk tegangan referensi 11 Volt pada frekuensi 1 KHz.
Berdasarkan gambar 4.3, dapat terlihat adanya gelombang kotak dengan waktu
periode on sebesar 76,7 µs. Sedangkan untuk mengetahui besarnya waktu periode off
dapat di lihat pada gambar 4.4.
Gambar 4.4. Pengamatan Duty cycle dengan Vref=11 (f=1 KHz)
Berdasarkan gambar 4.4 di atas, tampak bahwa pada layar osiloskop digital
dapat dilhat adanya bentuk gelombang kotak dengan waktu periode off = 933,5µs.
Pada pengamatan dengan menggunakan osiloskop digital ini, dapat terlihat bahwa
semakin kecil nilai tegangan referensi maka periode waktu on semakin besar dan
periode waktu off semakin kecil sehingga nilai duty cycle semakin besar. Setelah
mengetahui besarnya nilai waktu periode on dan waktu periode off, maka dapat di
4.3. Pembahasan
Pada bagian ini disajikan pembahasan berdasarkan data hasil pengamatan
kemudian membandingkannya dengan data hasil perhitungan secara teori untuk
mencari besarnya kesalahan pengukuran. Berikut akan disajikan perhitungan
berdasarkan data hasil pengamatan dan perhitungan berdasarkan teori.
Setelah diketahui besarnya nilai waktu periode on dan waktu periode off
berdasarkan pengamatan menggunakan osiloskop digital, maka dapat dicari besarnya
nilai duty cycle. Berdasarkan gambar 4.3 dan 4.4. dapat dicari besarnya nilai duty
cycle untuk tegangan referensi 11 volt pada frekuensi 1 KHz. Untuk lebih jelasnya
perhatikan perhitungan di bawah ini :
Waktu periode on(Ton) = 76,7 µs
Waktu periode off (Toff) = 933,5 µs
Maka :
Duty cycle (δ) =
Toff Ton
Ton
+
=
(
76.7 933.5)
7 . 76
+
= 7,592 %
Pada bab 2, sebelumnya telah dijelaskan bagaimana cara mencari besar nilai
duty cycle dengan menggunakan teorema phytagoras. Untuk mencari nilai dutycycle,
maka di bawah ini disajikan perhitungan untuk mengetahui besar nilai duty cycle
berdasarkan perhitungan secara teori untuk tegangan referensi 11 Volt dengan
frekuensi 1 KHz. Untuk menghitung besarnya nilai duty cycle berdasarkan teori dapat
Frekuensi (F) = 1 KHz
Perioda (T) = 1000 ms
Tegangan referensi (Vref) = 11 Volt
Tinggi Segitiga = 10 Vp
Maka : Toff T Vref Vpp 2 1 2 1 =
(
)
Vp V ms Toff 10 5 , 8 1000 2 1 21 = ×
= 425 µs (Toff = 950 µs)
Sehingga :
Ton = Perioda Total ( T ) – Toff
= 1000 - 950
= 50 µs
Setelah kita mengetahui besar nilai periode waktu on dan periode waktu off
maka nilai duty cycle dapat diperoleh berdasarkan persamaan 2.10.
Duty cycle (δ) = ×100%
+Toff Ton
Ton
=
(
950 50)
100%50
×
+ V
V V
= 5 %
Berdasarkan hasil pengamatan dan perhitungan di atas, maka membuktikan
bahwa besarnya nilai duty cycle berbanding terbalik dengan nilai tegangan referensi.
Untuk mengetahui secara lengkap mengenai data hasil perhitungan berdasarkan teori
(f = 1 KHz dan f = 2 KHz) secara lengkap dapat dilihat pada tabel 3 dan tabel 4 yang
Hasil pengukuran berdasarkan pengamatan pada alat ukur masih memiliki
beberapa kesalahan. Untuk mencari besarnya nilai kesalahan, maka dapat dicari
berdasarkan persamaan 4.1 dan 4.2.
E = nilai sejati – aproksimasi ………. (4.1)
dan
ε=
i NilaiSejat
Galat
.100% ………. (4.2)
Keterangan:
E = Galat (true error)
ε = Persen galat
Contoh perhitungan kesalahan pengukuran tegangan motor untuk percobaan I
(f=1KHz) :
Aproksimasi = 0 V
Nilai sejati = 5 V
Maka:
V V V
E =5 −0 =5
Sehinga :
V V
5 5 =
ε .100% = 100%
Setelah dihasilkan nilai kesalahan dari hasil pengukuran dapat dihasikan juga
nilai rata-rata dari kesalahan alat ukur ini. Untuk menghitung nilai rata-rata tersebut
dihitung dengan perhitungan dibawah ini.
Contoh perhitungan rata – rata kesalahan pengukuran untuk tabel 4.1(f=1KHz) ::
Rata-rata kesalahan =
n kesalahan
= 49
297 , 879
; n = jumlah pengukuran
= 17,945%
Berdasarkan perhitungan untuk mencari besarnya nilai kesalahan di atas,
berikut akan disajikan data hasil perhitungan nilai kesalahan yang ditampilkan
dalam bentuk tabel dan grafik untuk frekuensi 1 KHz dan 2 KHz.
4.3.1. Frekuensi 1 KHz A. Duty Cycle
Tabel 4.1. di bawah ini menunjukkan perbandingan antara data hasil
pengamatan dengan data hasil perhitungan sesuai dengan hasil perancangan
yang telah dibahas pada BAB III.
Tabel 4.1. Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk frekunsi 1 KHz.
No
Tegangan Referensi (V)
Duty cycle (%) pengamatan
Duty Cycle (%) teori
Galat (V)
Galat (%)
1 12 0 5 5 100
2 11.8 1.267 7 5.733 81.9
3 11.6 2.534 9 6.466 71.844
4 11.4 3.791 11 7.209 65.536
5 11.2 5.059 13 7.941 61.084
6 11 7.592 15 7.408 49.387
7 10.8 8.859 17 8.141 47.888
8 10.6 11.394 19 7.606 40.031
9 10.4 13.805 21 7.195 34.262
10 10.2 15.185 23 7.815 33.978
11 10 17.497 25 7.503 30.012
12 9.8 19.249 27 7.751 28.707
13 9.6 22.5 29 6.5 22.414
14 9.4 24.052 31 6.948 22.413
15 9.2 26.579 33 6.421 19.457
16 9 28.203 35 6.797 19.42
17 8.8 30.77 37 6.23 16.838
18 8.6 32.467 39 6.533 16.751
19 8.4 35.445 41 5.555 13.549
20 8.2 37.177 43 5.823 13.542
21 8 39.743 45 5.257 11.682
Tabel 4.1. Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk frekunsi 1 KHz (Lanjutan).
No
Tegangan Referensi (V)
Duty cycle (%) pengamatan
Duty Cycle (%) teori
Galat (V)
Galat (%)
23 7.6 43.589 49 5.411 11.043
24 7.4 45.57 51 5.43 10.647
25 7.2 48.717 53 4.283 8.081
26 7 50 55 5 9.09
27 6.8 54.429 57 2.571 4.51
28 6.6 56.411 59 2.589 4.388
29 6.4 58.973 61 2.027 3.322
30 6.2 60.257 63 2.743 4.353
31 6 62.823 65 2.177 3.349
32 5.8 64.555 67 2.445 3.649
33 5.6 67.533 69 1.467 2.126
34 5.4 71.813 71 0.813 1.132
35 5.2 73.421 73 0.421 0.573
36 5 75.948 75 0.948 1.248
37 4.8 77.499 77 0.499 0.643
38 4.6 80.77 79 1.77 2.191
39 4.4 82.502 81 1.502 1.82
40 4.2 84.814 83 1.814 2.138
41 4 86.257 85 2.257 2.616
42 3.8 88.606 87 1.606 1.812
43 3.6 91.14 89 2.14 2.348
44 3.4 92.407 91 1.407 1.522
45 3.2 94.941 93 1.941 2.044
46 3 96.209 95 1.209 1.256
47 2.8 97.466 97 0.466 0.478
48 2.6 98.729 99 0.271 0.273
49 2.4 100 100 0 0
Pada tabel 4.1. di atas tampak perbedaan data antara hasil pengukuran
dengan perhitungan secara teori, meskipun penyimpangannya tidak terlalu
besar. Setelah di hasilkan nilai kesalahan dari hasil pengukuran dapat dihasilkan
juga nilai rata-rata dari kesalahan alat ukur ini. Untuk menghitung nilai rata-rata
tersebut dapat dihitung dengan perhitungan dibawah ini.
Rata-rata kesalahan =
n kesalahan
= 49
297 , 879
; n = jumlah pengukuran
= 17,945 %
Berdasarkan hasil perhitungan di atas maka besarnya nilai rata-rata
kesalahan alat ukur ini sebesar 17,945 %,. Untuk lebih jelasnya mengenai hasil
perbandingan data hasil pengamatan dan teori dapat dilihat dalam Gambar 4.5.
Gambar 4.5. Grafik Perbandingan Duty Cycle
Dari Gambar 4.5. dapat diketahui bahwa semakin tinggi nilai tegangan
referensi maka akan semakin tinggi pula nilai dari duty cycle. Dari grafik
tersebut dapat dilihat pula bahwa nilai duty cycle hasil pengamatan dengan nilai
duty cycle hasil perhitungan secara teori tidak terlalu jauh perbedaannya.
Sehingga dapat di katakan data hasil pengamatan hampir mendekati data hasil
perhitungan secara teori.
B. Tegangan Motor
Di dalam alat pengendali kecepatan putar motor dc ini, pengukuran
masuk pada motor dc dengan menggunakan multimeter digital. Untuk lebih
jelasnya dapat dilihat pada tabel 4.2.
Tabel 4.2. Perbandingan data Tegangan motor hasil pengamatan dengan perhitungan untuk frekunsi 1 KHz.
No Tegangan Referensi (V) Tegangan Motor (V) Teori Tegangan Motor (V) Pengamatan Galat (V) Galat (%)
1 12 0.01 5 4.99 99.8
2 11.8 2.07 7 4.93 70.428
3 11.6 3.85 9 5.15 57.222
4 11.4 5.65 11 5.35 48.636
5 11.2 7.53 13 5.47 42.077
6 11 9.73 15 5.27 35.133
7 10.8 11.7 17 5.3 31.176
8 10.6 13.95 19 5.05 26.579
9 10.4 15.9 21 5.1 24.286
10 10.2 18.2 23 4.8 20.869
11 10 20.42 25 4.58 18.32
12 9.8 22.49 27 4.51 16.703
13 9.6 24.72 29 4.28 14.758
14 9.4 26.98 31 4.02 12.968
15 9.2 29.27 33 3.73 11.303
16 9 31.43 35 3.57 10.2
17 8.8 33.38 37 3.62 9.783
18 8.6 35.5 39 3.5 8.974
19 8.4 37.88 41 3.12 7.609
20 8.2 39.98 43 3.02 7.023
21 8 42.1 45 2.9 6.444
22 7.8 44.1 47 2.9 6.17
23 7.6 46.2 49 2.8 5.714
24 7.4 48.4 51 2.6 5.098
25 7.2 50.6 53 2.4 4.528
26 7 52.7 55 2.3 4.181
27 6.8 54.3 57 2.7 4.736
28 6.6 56.6 59 2.4 4.067
29 6.4 58.8 61 2.2 3.606
30 6.2 60.8 63 2.2 3.492
31 6 62.01 65 2.99 4.6
32 5.8 65.1 67 1.9 2.835
33 5.6 67.2 69 1.8 2.608
34 5.4 69.2 71 1.8 2.535
35 5.2 71.3 73 1.7 2.328
36 5 73.8 75 1.2 1.6
37 4.8 75.8 77 1.2 1.558
38 4.6 77.8 79 1.2 1.519
39 4.4 79.9 81 1.1 1.358
Tabel 4.2. Perbandingan data Tegangan motor hasil pengamatan dengan perhitungan untuk frekunsi 1 KHz (Lanjutan).
No
Tegangan Referensi (V)
Tegangan Motor (V) Teori
Tegangan Motor (V) Pengamatan
Galat (V)
Galat (%)
41 4 83.8 85 1.2 1.411
42 3.8 86.2 87 0.8 0.919
43 3.6 88.4 89 0.6 0.674
44 3.4 90.6 91 0.4 0.439
45 3.2 92.3 93 0.7 0.752
46 3 93.1 95 1.9 2
47 2.8 96.2 97 0.8 0.824
48 2.6 97.3 99 1.7 1.717
49 2.4 98 100 2 2
Berdasarkan pada tabel 4.2 diatas kita dapat menghitung besarnya nilai
rata-rata kesalahan dari data tersebut melalui perhitungan dengan menggunakan
persamaan 4.2.
Rata-rata kesalahan =
n kesalahan
∑
= 49
885 , 654
; n = jumlah pengukuran
= 13,365 %
Maka besarnya rata-rata kesalahan alat ukur ini adalah sebesar 13,365 %,
Untuk lebih jelasnya dapat dilihat pada grafik perbandingan duty cycle
berdasarkan hasil pengamatan dan perhitungan dalam Gambar 4.6.
Dari Gambar 4.6. dapat dilihat pula bahwa besarnya nilai tegangan motor
hasil pengamatan hampir mendekati nilai tegangan motor hasil perhitungan
secara teori. Di dalam alat pengendali tegangan motor dc ini, besarnya nilai
tegangan motor selain dipengaruhi oleh hambatan dalam juga sangat
dipengaruhi oleh adanya pembebanan pada motor dc tersebut.
C. Kecepatan Motor
Di dalam pengendalian kecepatan putar motor dc ini, selain dilakukan
dilakukan pengamatan terhadap duty cycle dan tegangan motor juga dilakukan
pengamatan pengaruh duty cycle terhadap besarnya nilai kecepatan. Di dalam
melakukan pengamatan digunakan instrumen berupa sebuah alat tachometer,
yaitu semacam alat untuk mengukur kecepatan putar sebuah motor. Untuk dapat
mengukur besar nilai kecepatan motor maka penulis menggunakan sebuah
piringan Compact Disc (CD) yang di beri warna berupa bagian warna gelap dan
terang . Hal ini dikarenakan alat ukur tachometer hanya dapat bekerja apabila
sinar inframerah mengenai media yang berwarna gelap. Untuk lebih jelasnya
mengenai pengaruh duty cycle terhadap kecepatan putaran motor dapat di lihat
pada tabel 4.3.
Tabel 4.3. Data hasil pengamatan pengaruh duty cycle terhadap kecepatan putaran motor untuk frekunsi 1 KHz.
No Duty Cycle (%) Kecepatan Motor (Rpm)
Tabel 4.3. Data hasil pengamatan pengaruh duty cycle terhadap kecepatan putaran motor untuk frekunsi 1 KHz (Lanjutan).
No Duty Cycle (%) Kecepatan Motor (Rpm)
10 15.185 11 17.497 12 19.249
13 22.5 199.725
14 24.052 589.25
15 26.579 896.475
16 28.203 1355.875
17 30.77 1758
18 32.467 2106.625
19 35.445 2534.625
20 37.177 2903
21 39.743 3299.375
22 41.027 3557.75
23 43.589 3681.875
24 45.57 3826.5
25 48.717 3910.625
26 50 4206.375
27 54.429 4796.25
28 56.411 4908.375
29 58.973 5204.625
30 60.257 5522.75
31 62.823 5809.375
32 64.555 6188
33 67.533 6702.375
34 71.813 7048.75
35 73.421 7462.625
36 75.948 8161.625
37 77.499 8436.375
38 80.77 8610.75
39 82.502 8786.375
40 84.814 8949.875
41 86.257 9124
42 88.606 9259.25
43 91.14 9398.375
44 92.407 9552..375
45 94.941 9868.375
46 96.209 9973.375
47 97.466 10306.125
48 98.729 10407.375
Pada tabel 4.3. di atas tampak bahwa nilai duty cycle berpengaruh
terhadap besarnya nilai kecepatan putaran motor. Motor mulai bergerak pada
duty cycle 22,5 % dengan kecepatan 199.725 rpm. Di dalam melakukan
pengamatan kecepatan putaran motor DC, dapat diketahui bahwa semakin besar
nilai duty cycle maka kecepatan motor DC juga semakin tinggi. Untuk
mengetahui mengenai karakteristik dari duty cycle terhadap kecepatan motor
dapat di lihat pada gambar 4.7.
0 2000 4000 6000 8000 10000 12000
0 50 100 150
Duty cycle (%)
K
ecep
at
an
M
o
to
r
(R
p
m
)
Gambar 4.7. Grafik Pengaruh Duty Cycle terhadap Kecepatan Motor
Berdasarkan pada gambar 4.7. Tampak bahwa kecepatan motor semakin
bertambah dengan semakin besarnya nilai duty cycle. Motor mulai bergerak
pada level duty cycle 22,5 % sampai dengan 100 % dengan kecepatan motor
4.3.2. Frekuensi 2 KHz A. Duty Cycle
Untuk mengubah besarnya frekuensi PWM dapat di lakukan dengan
mengubah besarnya nilai hambatan pada rangakaian PWM. Di dalam
melakukan pengamatan, digunakan sebuah saklar rotary untuk mempermudah
dalam melakukan pengubahan frekuensi. Model pengambilan data hampir sama,
yaitu dengan memberikan perubahan pada nilai duty cycle. Untuk lebih
jelasnya dapat dilihat pada tabel 4.3.
Tabel 4.4. Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk frekunsi 2 KHz.
No
Tegangan Referensi (V)
Duty cycle (%) Teori
Duty Cycle (%) Pengamatan
Galat (V)
Galat (%)
1 12 0 5 5 100
2 11.8 2.502 7 4.498 64.257
3 11.6 5.005 9 3.995 44.388
4 11.4 7.7 11 3.3 30
5 11.2 10.267 13 2.773 21.33
6 11 12.83 15 2.17 14.467
7 10.8 15.38 17 1.62 9.53
8 10.6 17.943 19 1.057 5.563
9 10.4 20.513 21 0.487 2.32
10 10.2 23.08 23 0.08 0.346
11 10 25.647 25 0.647 2.522
12 9.8 26.836 27 0.164 0.607
13 9.6 30.009 29 1.009 3.362
14 9.4 33.34 31 2.34 7.018
15 9.2 35.893 33 2.893 8.06
16 9 38.46 35 3.46 8.996
17 8.8 41.019 37 4.019 9.797
18 8.6 43.593 39 4.593 10.536
19 8.4 45.217 41 4.217 9.326
20 8.2 47.366 43 4.366 9.217
21 8 50.01 45 5.01 10.017
22 7.8 52.634 47 5.634 10.704
23 7.6 54.773 49 5.773 10.539
24 7.4 56.407 51 4.407 7.812
25 7.2 58.981 53 5.981 10.14
Tabel 4.4. Perbandingan duty cycle hasil pengamatan dengan perhitungan untuk frekunsi 2 KHz (Lanjutan).
No
Tegangan Referensi (V)
Duty cycle (%) Teori
Duty Cycle (%) Pengamatan
Galat (V)
Galat (%)
27 6.8 64.25 57 7.25 11.284
28 6.6 66.653 59 7.653 11.481