RANCANG-BANGUN ALAT PENUNJUK ARAH KIBLAT BERBASIS GPS
Teks penuh
Gambar
Dokumen terkait
Pada tugas akhir ini dikembangkan aplikasi pelacak posisi, kecepatan, arah dengan menggunakan Global Positioning System (GPS), diharapkan pengguna yang menggunakan perangkat
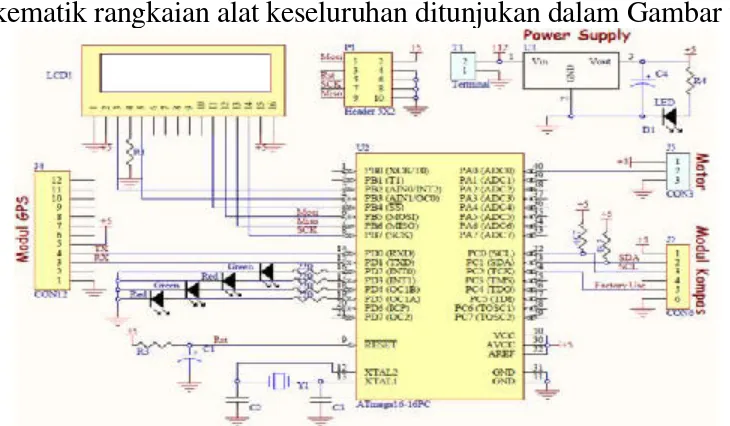
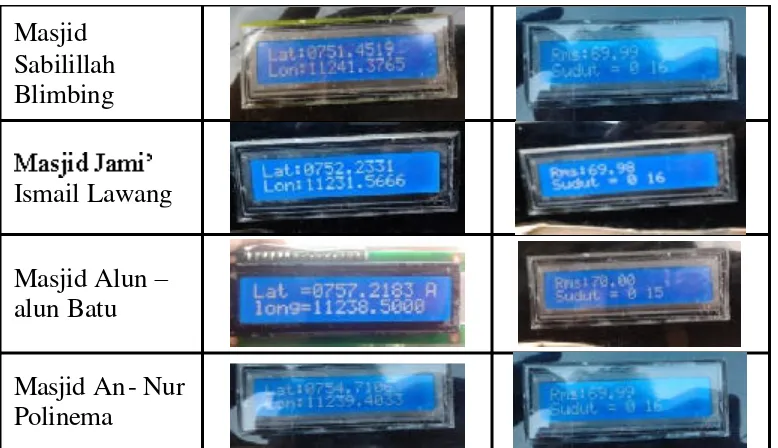
LCD adalah suatu komponen yang berfungsi sebagai tampilan suatu data.. baik karakter huruf ataupun grafik (contoh LCD dapat dilihat pada gambar
Arief, Hasan Asy’ari “Pengembangan Aplikasi Penentu Arah Kiblat Berdasarkan Global Positioning System (GPS) dan Arah Bayangan Matahari Pada Smartphone Berbasis Android”,
Dengan berpedoman pada posisi dan pergerakan benda-benda langit misalnya matahari sebagai acuan atau dengan bantuan satelit-satelit GPS maka, theodolit akan menjadi alat yang
Dibutuhkan sensor Global Positioning System (GPS) yang dipasang pada mikrokontroler Arduino dalam perancangan arsitektur sistem ini. Data dari koordinat titik posisi
Kapal pesiar dilengkapi dengan Global Positioning System (GPS) Alat navigasi ini termasuk dalam alat utama dikarenakan fungsi dari GPS ialah menunjukkan posisi dari titik
Perancangan alat pengaman sepeda motor dengan GPS berbasis IoT menggunakan beberapa komponen yaitu sensor optocoupler sebagai sensor kondisi kontak motor ON/OFF
BAB II ISI Pengertian GPS Global Positioning System GPS adalah sistem navigasi berbasis satelit yang digunakan untuk menentukan posisi geografis di permukaan Bumi dengan akurasi
