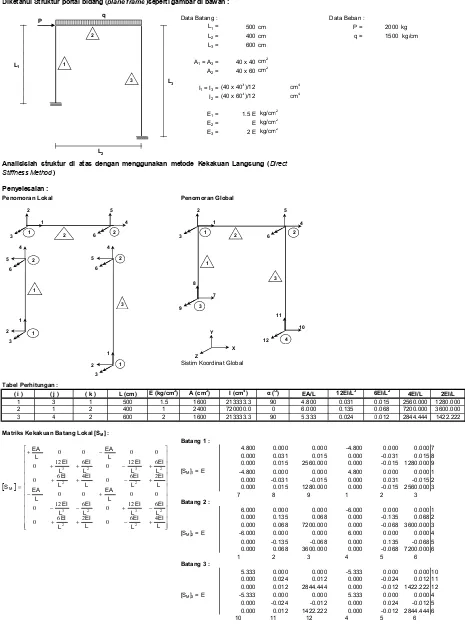
Diketahui Struktur portal bidang (plane frame)seperti gambar di bawah :
Data Batang : Data Beban :
L1 = 500 cm P = 2000 kg
Penyelesaian :
Penomoran Lokal Penomoran Global
Sistim Koordinat Global
Tabel Perhitungan :
( i ) ( j ) ( k ) L (cm) E (kg/cm2) A (cm2) I (cm4) α (O)
EA/L 12EI/L3 6EI/L2
4EI/L 2EI/L
1 3 1 500 1.5 1600 213333.3 90 4.800 0.031 0.015 2560.000 1280.000
2 1 2 400 1 2400 720000.0 0 6.000 0.135 0.068 7200.000 3600.000
3 4 2 600 2 1600 213333.3 90 5.333 0.024 0.012 2844.444 1422.222
Matriks Kekakuan Batang Lokal [SM] :
Batang 1 :
4.800 0.000 0.000 -4.800 0.000 0.000 7
0.000 0.031 0.015 0.000 -0.031 0.015 8
0.000 0.015 2560.000 0.000 -0.015 1280.000 9
[SM]1 = E -4.800 0.000 0.000 4.800 0.000 0.000 1
0.000 -0.031 -0.015 0.000 0.031 -0.015 2
0.000 0.015 1280.000 0.000 -0.015 2560.000 3
7 8 9 1 2 3
Batang 2 :
6.000 0.000 0.000 -6.000 0.000 0.000 1
0.000 0.135 0.068 0.000 -0.135 0.068 2
0.000 0.068 7200.000 0.000 -0.068 3600.000 3
[SM]2 = E -6.000 0.000 0.000 6.000 0.000 0.000 4
0.000 -0.135 -0.068 0.000 0.135 -0.068 5
0.000 0.068 3600.000 0.000 -0.068 7200.000 6
1 2 3 4 5 6
Batang 3 :
5.333 0.000 0.000 -5.333 0.000 0.000 10
0.000 0.024 0.012 0.000 -0.024 0.012 11
0.000 0.012 2844.444 0.000 -0.012 1422.222 12
[SM]3 = E -5.333 0.000 0.000 5.333 0.000 0.000 4
0.000 -0.024 -0.012 0.000 0.024 -0.012 5
0.000 0.012 1422.222 0.000 -0.012 2844.444 6
10 11 12 4 5 6
Analisislah struktur di atas dengan menggunakan metode Kekakuan Langsung (Direct Stiffness Method)
Matriks Rotasi Transformasi [RT] :
Batang 1 = Batang 3 (α = 90O) :
0 1 0 0 0 0
-1 0 0 0 0 0
0 0 1 0 0 0
[RT]1 = 0 0 0 0 1 0
0 0 0 -1 0 0
0 0 0 0 0 1
Batang 2 (α = 0O) :
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
[RT]2 = 0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
Matriks Rotasi Transformasi Transpose [RT]T :
Batang 1 = Batang 3 (α = 90O) :
0 -1 0 0 0 0
1 0 0 0 0 0
0 0 1 0 0 0
[RT]T1 = 0 0 0 0 -1 0
0 0 0 1 0 0
0 0 0 0 0 1
Batang 2 (α = 0O) :
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
[RT] T
2 = 0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
Matriks Kekakuan Batang Global [SMS] = [RT]T [SM] [RT]
Batang 1 :
0.031 0.000 -0.015 -0.031 0.000 -0.015 7
0.000 4.800 0.000 0.000 -4.800 0.000 8
-0.015 0.000 2560.000 0.015 0.000 1280.000 9
[SMS]1 = E -0.031 0.000 0.015 0.031 0.000 0.015 1
0.000 -4.800 0.000 0.000 4.800 0.000 2
-0.015 0.000 1280.000 0.015 0.000 2560.000 3
7 8 9 1 2 3
Batang 2 :
6.000 0.000 0.000 -6.000 0.000 0.000 1
0.000 0.135 0.068 0.000 -0.135 0.068 2
0.000 0.068 7200.000 0.000 -0.068 3600.000 3
[SMS]2 = E -6.000 0.000 0.000 6.000 0.000 0.000 4
0.000 -0.135 -0.068 0.000 0.135 -0.068 5
0.000 0.068 3600.000 0.000 -0.068 7200.000 6
1 2 3 4 5 6
Batang 3 :
0.024 0.000 -0.012 -0.024 0.000 -0.012 10
0.000 5.333 0.000 0.000 -5.333 0.000 11
-0.012 0.000 2844.444 0.012 0.000 1422.222 12
[SMS]3 = E -0.024 0.000 0.012 0.024 0.000 0.012 4
0.000 -5.333 0.000 0.000 5.333 0.000 5
-0.012 0.000 1422.222 0.012 0.000 2844.444 6
10 11 12 4 5 6
Catatan :
Perakitan Matriks Kekakuan Struktur [SJ] :
1
2
3
4 Untuk batang 2 tidak perlu ditransformasikan karena Sumbu Lokal sama dengan Sumbu Global. Hal ini juga berlaku untuk semua batang yang mempunyai
Sumbu Lokal sama dengan Sumbu Global.
[ ]
+
α
+
α
−
α
+
α
+
+
α
+
α
−
α
+
α
+
=
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
Cos
Sin
Sin
Cos
Cos
Sin
Sin
Cos
R
T[ ]
+
α
+
α
+
α
−
α
+
+
α
+
α
+
α
−
α
+
=
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
Cos
Sin
Sin
Cos
Cos
Sin
Sin
Cos
Penataan Ulang Matriks Kekakuan Struktur [SJ] (Rearrangement) :
Karena sistim penomoran terhadap sumbu global sudah dibuat sedemikian hingga tidak diperlukan penataan ulang.
1
2
3
4
5
6
[SJ] = E 7
8
9
10
11
12
1 2 3 4 5 6 7 8 9 10 11 12
Beban Ekivalen {AE} :
Batang 2 :
Momen Primer : FEM1-2 = +1/12(q.L
2) =
20000000 kgcm FEM2-1 = -1/12(q.L
2) =
-20000000 kgcm
Gaya Vertikal :
Karena FEM1-2 = FEM 2-1 dan letak beban simetris, maka V1 = V2 = 1/2(q.L)
V1 = V2 = 300000 kg
0 1 -300000 2 -20000000 3 0 4 -300000 5 20000000 6
Titik 1 : Beban Joint {AJ} :
= P
= 2000 kg 2000 1
Analisis Beban Joint Ekivalen {AC} = {AJ} + {AE} :
{AJ} {AE}
2000 0 2000 1
0 -300000 -300000 2
0 -20000000 -20000000 3
0 0 0 4 {AFC}
0 -300000 -300000 5
0 20000000 20000000 6
{AC} = 0 + 0 = 0 7
0 0 0 8
0 0 0 9 {ARC}
0 0 0 10
0 0 0 11
0 0 0 12
Matriks Perpindahan {DF} = [SFF]-1 {AFC}
18.406 0.000 0.000 18.333 0.000 0.000 2000 37036.19 1
0.000 0.203 0.000 0.000 0.005 0.000 -300000 -62332.24 2
{DF} = 1/E 0.000 0.000 0.000 0.000 0.000 0.000 * -20000000 = 1/E -3207.69 3 (cm)
18.333 0.000 0.000 18.427 0.000 0.000 0 36884.27 4
0.000 0.005 0.000 0.000 0.183 0.000 -300000 -56400.98 5
0.000 0.000 0.000 0.000 0.000 0.000 20000000 3140.81 6
S
FF
S
FR
S
RF
S
RR
1 2
L q
V1
V2
FEM1-2 FEM2-1
V2
FEM2-1
FEM1-2
Matriks Reaksi Tumpuan {AR} = - [ARC} + [SRF] {DF}
0 -1088.48 -1088.48 7
0 299194.76 299194.76 8
{AR} = - 0 + -4105276.47 = -4105276.47 9 (kg-cm)
0 -911.52 -911.52 10
0 300805.24 300805.24 11
0 4467361.50 3336220.47 12
Kontrol Reaksi : Σ
ΣΣ ΣH = 0
H7 + H10 + P = 0
-1088.48 + -911.52 + 2000 = 0
-(2000) + 2000 = 0 0 = 0 … Ok.
Σ ΣΣ ΣV = 0
V8 + V11 + (q.L) = 0
299194.76 + 300805.24 + -600000 = 0
600000.00 + -600000 = 0
0 = 0 … Ok.
Σ ΣΣ
ΣMterhadap titik 3 = 0 P.500 + 1/2(q.L2) + H
10.100 - V11.400 + M9 + M12 = 0
1000000 + 120000000 + 91152 - 120322096 + -4105276.47 + 3336220.47 = 0
769056 + -769056.00 = 0
0 = 0 … Ok.
Σ ΣΣ
ΣMterhadap titik 4 = 0
V8.400 - H7.100 + P.600 - 1/2(q.L 2
) + M9 + M12 = 0
119677904 - 108848 + 1200000 - 120000000 + -4105276.47 + 3336220.47 = 0
769056 + -769056.00 = 0
0 = 0 … Ok.
Gaya Ujung Batang :
{AM}i = {AML}i + [SM]i {DM}i
{AM}i = {AML}i + [SM]i .[RT].{DJ}i
Batang 1 :
0 4.8 0 0 -4.8 0 0 7
0 0 0.03072 0.01536 0 -0.03072 0.01536 8
{AM}1 = 0 + 0 0.01536 2560 0 -0.01536 1280 9
0 -4.8 0 0 4.8 0 0 1
0 0 -0.03072 -0.01536 0 0.03072 -0.01536 2
0 0 0.01536 1280 0 -0.01536 2560 3
0 -1 0 0 0 0 0 7
1 0 0 0 0 0 0 8
x 0 0 1 0 0 0 x 0 9
0 0 0 0 -1 0 37036.19 1
0 0 0 1 0 0 -62332.24 2
0 0 0 0 0 1 -3207.69 3
0 4.8 0 0 -4.8 0 0 7 0
0 0 0.03072 0.01536 0 -0.03072 0.01536 8 0
= 0 + 0 0.01536 2560 0 -0.01536 1280 9 x 0
0 -4.8 0 0 4.8 0 0 1 62332.2427
0 0 -0.03072 -0.01536 0 0.03072 -0.01536 2 37036.1937
0 0 0.01536 1280 0 -0.01536 2560 3 -3207.6917
299194.76 7 -1088.48 8
= -4105276.47 9 -299194.76 1 1088.48 2 -8211121.82 3
7 8 9 1 2
3
1
Batang 2 :
0 6 0 0 -6 0 0 1
300000 0 0.135 0.0675 0 -0.135 0.0675 2
{AM}2 = 20000000 + 0 0.0675 7200 0 -0.0675 3600 3
0 -6 0 0 6 0 0 4
300000 0 -0.135 -0.0675 0 0.135 -0.0675 5
-20000000 0 0.0675 3600 0 -0.0675 7200 6
1 0 0 0 0 0 37036.1937 1
0 1 0 0 0 0 -62332.243 2
x 0 0 1 0 0 0 x -3207.6917 3
0 0 0 1 0 0 36884.27 4
0 0 0 0 1 0 -56400.98 5
0 0 0 0 0 1 3140.81 6
0 911.5182725 1
300000 -805.235024 2
= 20000000 + -11788878.2 3
0 -911.518273 4
300000 805.2350241 5
-20000000 11065714.14 6
911.52 1 299194.76 2
= 8211121.82 3 -911.52 4 300805.24 5 -8934285.86 6
Batang 3 :
0 5.333333333 0 0 -5.3333333 0 0 10
0 0 0.0237037 0.011851852 0 -0.023704 0.011851852 11
{AM}3 = 0 + 0 0.0118519 2844.444444 0 -0.011852 1422.222222 12
0 -5.33333333 0 0 5.33333333 0 0 4
0 0 -0.023704 -0.01185185 0 0.0237037 -0.01185185 5
0 0 0.0118519 1422.222222 0 -0.011852 2844.444444 6
0 -1 0 0 0 0 0 10
1 0 0 0 0 0 0 11
x 0 0 1 0 0 0 x 0 12
0 0 0 0 -1 0 36884.27 4
0 0 0 1 0 0 -56400.98 5
0 0 0 0 0 1 3140.81 6
0 5.333333333 0 0 -5.3333333 0 0 10 0
0 0 0.0237037 0.011851852 0 -0.023704 0.011851852 11 0
= 0 + 0 0.0118519 2844.444444 0 -0.011852 1422.222222 12 x 0
0 -5.33333333 0 0 5.33333333 0 0 4 56400.9816
0 0 -0.023704 -0.01185185 0 0.0237037 -0.01185185 5 36884.274
0 0 0.0118519 1422.222222 0 -0.011852 2844.444444 6 3140.80619
300805.24 10 -911.52 11
= 3336220.47 12 -300805.24 4
911.52 5 8934285.86 6
Catatan : Untuk Gambar Bidang M, D dan N dapat dicoba sendiri dengan cara Superposisi.
Untuk bentuk portal yang lain, seperti portal dengan salah satu atau kedua kakinya miring dapat dicoba dikerjakan di rumah. 2
1 3
5
4 6
2
1 2
4 5
6
10 11 12
3