KENDALI MOTOR ARUS SEARAH
1. Pendahuluan
Seperti kita ketahui bahwa motor-motor DC mempunyai karakteristik yang berubah-rubah, sehingga didalam penerapannya memungkinkan untuk digunakan sebagai penggerak dengan kecepatan yang dapat dirubah-rubah. Selain itu motor-motor DC juga mampu menyediakan torsi awal yang tinggi dan memungkinkan untuk mendapatkan daerah operasi yang luas dalam mengendalikan kecepatannya.
Metoda-metoda dari kendali kecepatan motor-motor DC biasanya lebih sederhana dan lebih murah bila dibandingkan dengan kendali kecepatan motor-motor AC. Oleh karena itu motor-motor DC akan mempunyai peranan penting dalam industri modern saat ini.
Dari kedua jenis tipe penguatan pada motor-motor DC yaitu penguatan-penguatan seri dan terpisah, keduanya di dalam penerapannya biasanya digunakan sebagai penggerak-penggerak dengan kecepatan yang variabel, dan untuk motor-motor seri banyak digunakan sebagai tenaga-tenaga penarik/derek (Ttractor machine). Oleh karena adanya komutator, motor-motor DC tidak sesuai untuk penerapan dengan kecepatan yang sangat tinggi dan memerlukan perawatan yang lebih hati-hati dibandingkan dengan motor-motor AC.
Di dalam prakteknya, penggerak-penggerak DC ini menggunakan sumber DC yang diperoleh dari penyearah yang terkendali dan DC chopper. Dimana penyearah tersebut akan menyediakan tegangan keluaran DC yang variabel dari tegangan masukan AC yang tetap, sedang DC chopper akan menyediakan tegangan keluaran DC yang variabel dari tegangan masukan DC yang tetap. Oleh karena kemampuannya menyediakan tegangan DC yang variabel secara terus-menerus (kontinyu), penyearah terkendali dan DC chopper mampu membuat suatu revolusi industri modern di dalam peralatan kendali dan penggerak-penggerak dengan kecepatan yang variabel.
Secara umum, penggerak-penggerak DC dapat dikategorikan menjadi tiga tipe:
• Penggerak-penggerak 1-fasa (single phase drives)
• Penggerak-penggerak 3-fasa (three-phase drives)
• Penggerak-penggerak chopper (chopper drives)
2. Karakteristik Dasar Motor Arus Searah
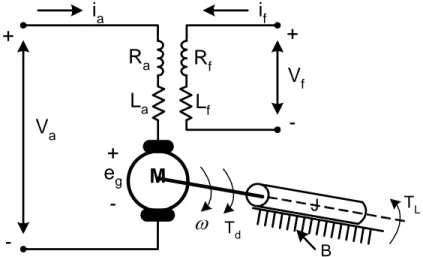
Gambar 1. Menunjukkan rangkaian pengganti sebuah motor DC dengan penguatan terpisah, dimana motor akan menghasilkan tegangan balik (back emf) dan torsi (untuk mengimbangi torsi bebannya pada kecepatan tertentu) ketika motor dikuatkan oleh arus medannya If dan adanya arus jangkar Ia yang
mengalir pada rangkaian jangkarnya.
Pada penguatan terpisah ini antara arus medan If dan arus jangkar Ia tidak ada
ketergantungan satu sama lain, sehingga bila ada perubahan pada arus jangkar tidak akan berpengaruh pada arus medannya. Umumnya arus medan adalah sangat kecil dibandingkan dengan arus jangkarnya.
Dari penganalisaan gambar 1. Dapat ditentukan persamaan yang menerangkan tentang karakteristik dari motor dengan penguatan terpisah.
V
ai
aR
aL
aR
fL
fi
fV
fω
Td TL B J+
-+
-e
g-+
M
Sehingga arus medan sesaatnya dapat diuraikan sebagai berikut :
dt
di
L
I
R
V
f=
f f+
f f 1-1 dan untuk arus jangkarnya dapat dicari dari :g a a a a a
e
dt
di
L
I
R
V
=
+
+
1-2Tegangan balik motor, yang mana dikenal juga sebagai tegangan putar (speed voltage), dapat diekspresikan sebagai berikut :
ω
ω
= Φ=K i K
eg v f 1-3
Sedang torsi yang dihasilkan oleh motor adalah : a a f t d K i i K i T = = Φ 1-4
yang mana torsi yang dihasilkan oleh motor ini, harus sama dengan torsi yang disebabkan oleh beban :
L d B T dt d J T =
ω
+ω
+ 1-5 dimana :beban
torsi
T
Ω
medan,
rangkaian
resistansi
R
Ω
jangkar,
rangkaian
resistansi
R
Henry
medan,
rangkaian
induktansi
L
Henry
jangkar,
rangkaian
rangkaian
induktansi
L
orsi
konstantat
I
K
K
I
K
rad/s
V/A
esekan,
konstantag
B
rad/s
otor,
kecepatanm
ω
L f a f a f v t f Φ=
=
=
=
=
=
=
=
=
=
Dalam keadaan tunak (steady state), yang mana
=
0
,
=
0
dt
d
dan
dt
di
fω
akan diperoleh : f f f R I V = 1-6 f v g K I e =ω
1-7 f v a a g a a a R I e R I K I V = + = +ω
1-8L a f t d K I I B T T = =
ω
+ 1-9Daya yang dibangkitkan adalah :
ω
d
T
P
=
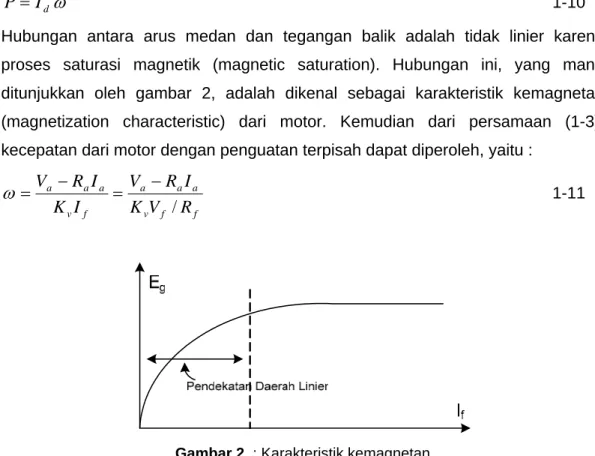
1-10Hubungan antara arus medan dan tegangan balik adalah tidak linier karena proses saturasi magnetik (magnetic saturation). Hubungan ini, yang mana ditunjukkan oleh gambar 2, adalah dikenal sebagai karakteristik kemagnetan (magnetization characteristic) dari motor. Kemudian dari persamaan (1-3), kecepatan dari motor dengan penguatan terpisah dapat diperoleh, yaitu :
f f v a a a f v a a a
R
V
K
I
R
V
I
K
I
R
V
/
−
=
−
=
ω
1-11Gambar 2. : Karakteristik kemagnetan
Dari persamaan (1-11) dapat dicatat bahwa kecepatan motor dapat diatur dengan jalan :
1. Mengatur tegangan jangkar Va, dan disebut sebagai kendali tegangan.
2. Mengatur arus medan If, dan disebut sebagai kendali medan.
3. Mengatur kebutuhan torsinya, yang mana berhubungan dengan arus jangkarnya untuk arus medan yang tetap.
Kecepatan yang berhubungan dengan rating tegangan jangkar, arus medan dan arus jangkarnya dikenal sebagai kecepatan dasar (base speed).
Di dalam prakteknya, untuk pengoperasian dengan kecepatan yang lebih kecil dari kecepatan dasarnya, arus jangkar dan arus medannya harus dijaga tetap konstan, hal ini untuk memenuhi kebutuhan torsinya, dan untuk mengontrol kecepatannya,
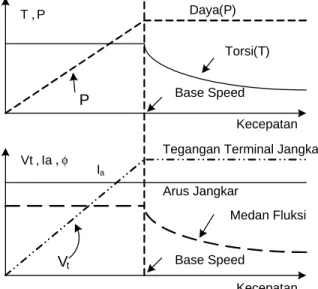
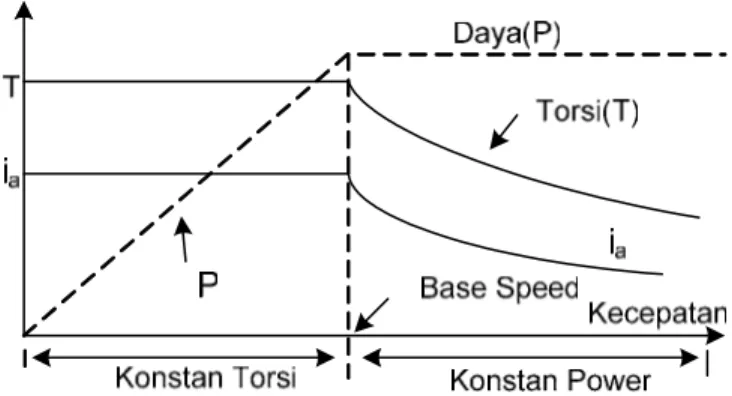
tegangan jangkarnya dapat dirubah-rubah. Sedang untuk pengoperasian dengan kecepatan yang lebih tinggi dari kecepatan dasarnya, tegangan jangkarnya harus dijaga tetap pada harga ratingnya dan untuk mengontrol kecepatannya dapat dilakukan dengan mengubah-ubah arus medannya, sehinggga daya yang dihasilkan
(
=
T
dω
)
akan tetap konstan. Hal ini dapat dianalisa dari gambar 3. Yang menunjukkan karakteristik dari torsi, daya, arus jangkar dan arus medan terhadap kecepatannya. T , P Daya (P) Torsi (T) P Base Speed Kecepatan Kecepatan Ia Vt , Ia Medan Fluksi Arus Jangkar VtTegangan Terminal Jangkar
Base Speed
Gambar 3. : Karakteristik motor DC penguat terpisah
Di dalam hubungannya, belitan medan dari sebuah motor DC bisa dihubungkan secara seri dengan rangkaian jangkarnya seperti yang ditunjukkkan oleh gambar 4. Dan tipe motor seperti ini disebut motor seri.
Va ia Ra La ω Td TL B J + -eg -+ M
Pada kondisi seimbang, berlaku bahwa :
ω
ω
= Φ =K I K Eg v a 1-12 a v a a g a a a R I E R I K I V = + = +ω
1-13 L a a a t dK
I
I
K
I
B
T
T
=
=
Φ=
ω
+
1-14Catatan bahwa pada motor seri Ia = If danKΦ =KtIf = KtIa =KvIa
Kemudian dari persamaan (1-13), kecepatan dari motor seri dapat ditentukan :
Φ
−
=
−
=
K
I
R
V
I
K
I
R
V
a a a a v a a aω
1-15Kecepatan motor seri dapat dirubah dengan mengendalikan : 1. Tegangan jangkar Va atau
2. Arus jangkar, yang mana merupakan pengukuran dari kebutuhan torsinya. Dari persamaan (1-13) menunjukkan bahwa motor seri dapat menyediakan torsi yang tinggi khususnya pada saat mula (starting) dan oleh karena alasan ini motor-motor seri biasa digunakan sebagai penarik/derek (traction aplication).
Untuk pengoperasian dengan kecepatan sampai dengan kecepatan dasarnya, tegangan jangkar harus dirubah untuk menjaga torsinya agar tetap konstan. Pemakaian tegangan jangkar pada harga ratingnya, membuat hubungan dari torsi dan kecepatannya akan mengikuti karakteristik aslinya (natural characteristic) dan daya yang dihasilkan akan tetap konstan.
Pada saat tuntutan torsinya menurun, maka kecepatannya akan naik. Untuk beban yang sangat kecil kecepatannya akan menjadi sangat tinggi dan hal ini tidak dianjurkan untuk mengoperasikan motor seri pada kondisi tanpa beban. Untuk memperkuat analisa kita, gambar 5. Menunjukkan karakteristik dari motor seri yang dapat digunakan sebagai pedoman.
Gambar 5. : Karakteristik motor DC dengan penguatan seri
3. Penggerak Motor Arus Searah Satu - Fasa
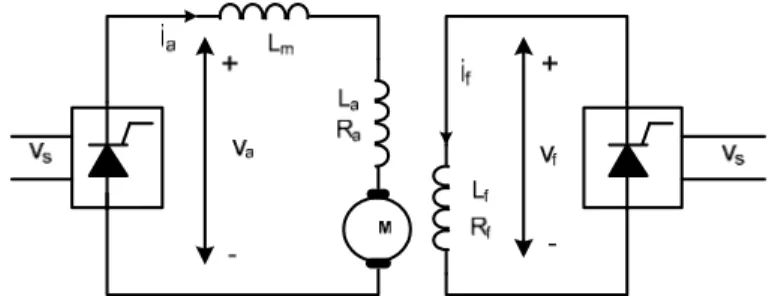
Bila rangkaian jangkar dari sebuah motor DC dihubungkan dengan keluaran dari sebuah penyearah satu fasa yang terkendali, maka tegangan jangkarnya dapat dirubah dengan merubah sudut tunda dari konverternya
α
a . Rangkaian dasar untuk hubungan konverter satu fasa dengan motor DC-nya dengan penguatan terpisah adalah seperti ditunjukkan pada gambar 6.Pada saat sudut tundanya rendah, arus jangkarnya menjadi tidak kontinyu, yang mana akan menyebabkan naiknya kurugian-kerugian pada motornya. Sebuah tapis induktor (induktor penghalus) Lm , biasanya dihubungkan secara seri
dengan rangkaian jangkarnya, yang mana dimaksudkan untuk mengurangi ripple pada arusnya kesuatu harga yang diijinkan. Untuk mengendalikan arus medannya, kita bisa mengubah sudut tunda
α
f , dari sebuah konverter lain yang dihubungkan pada rangkaian medannya. Ketergantungannya pada tipe konverter yang digunakan, maka penggerak-penggerak satu fasa dapat diklasifikasikan menjadi beberapa tipe, yaitu :1. Penggerak-penggerak dengan konverter setengah gelombang satu fasa (single-phase half-wave converter drive),
2. Penggerak-penggerak dengan konverter satu fasa (single phase semi-converter drives),
3. Penggerak-penggerak dengan konverter gelombang penuh satu fasa (single phase full-converter drives),
4. Penggerak-penggerak dengan konverter ganda satu fasa (single phase dual-converter drives).
Gambar 6. : Rangkaian dasar dari penggerak DC satu fasa
3.1.
Penggerak Dengan Konverter Setengah Gelombang Satu-Fasa
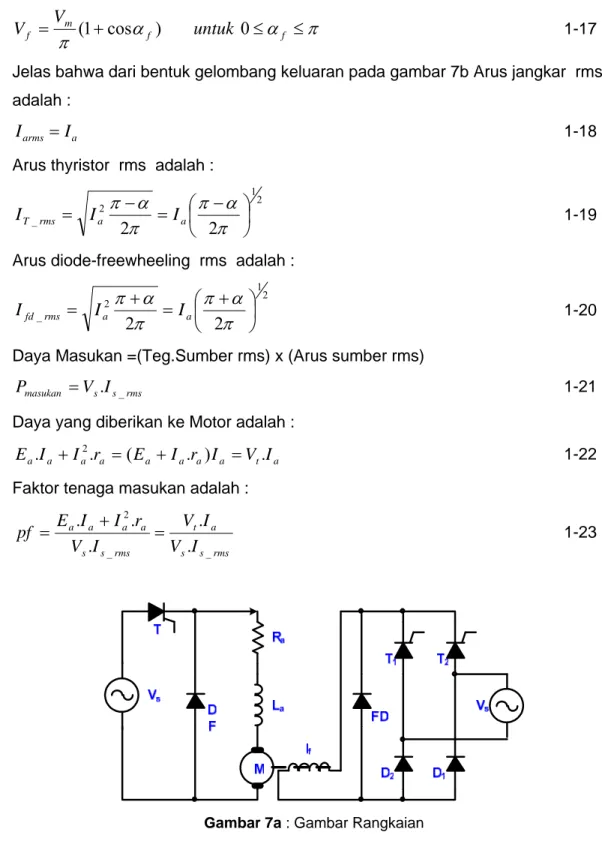
Gambar 7.(a) menunjukkan hubungan atau rangkaian dari penggerak konverter setengah gelombang satu fasa, dimana dalam hal ini arus jangkarnya akan selalu tidak kontinyu tanpa adanya induktor yang sangat besar yang dihubungkan pada rangkaian jangkarnya. Pada rangkaian ini juga diperlukan adanya dioda free wheeling, karena beban motor DC (bersifat induktif) dan tipe penggerak ini hanya beroperasi pada satu (1) kwadran saja, oleh karena itu disebut juga sebagai penggerak satu kwadran (one-quadrant drives), seperti terlihat pada gambar 7(b). Sedang gambar 7(c) menunjukkan bentuk gelombang untuk beban induktif yang tinggi.
Di dalam aplikasinya, tipe penggerak ini dibatasi hanya untuk pemakaian daya sampai dengan setengah (1/2) KW. Kemudian pada rangkaian medannya, konverter yang digunakan harus sebuah konverter. Akan tetapi semi-konverter ini akan meningkatkan kurugian-kerugian magnetik dari motor, karena
ripple yang terkandung pada arus penguatannya. Dengan pemakaian konverter setengah gelombang satu fasa di dalam rangkaian jangkarnya, maka tegangan rata-rata pada rangkaian jangkarnya adalah :
π
α
α
π
+
≤
≤
=
m a a auntuk
V
V
(
1
cos
)
0
2
1-16Pemakaian semi-konverter pada rangkaian medannya, akan memberikan harga rata-rata dari tegangan medannya sebesar
π
α
α
π
+
≤
≤
=
m f f funtuk
V
V
(
1
cos
)
0
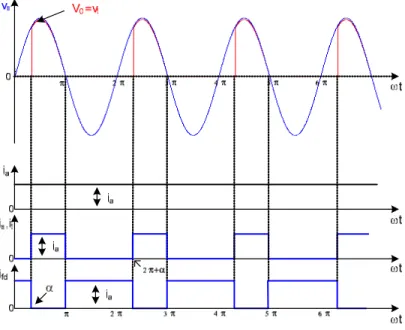
1-17Jelas bahwa dari bentuk gelombang keluaran pada gambar 7b Arus jangkar rms adalah :
a arms
I
I
=
1-18Arus thyristor rms adalah :
2 1 2 _
2
2
⎟
⎠
⎞
⎜
⎝
⎛ −
=
−
=
π
α
π
π
α
π
a a rms TI
I
I
1-19Arus diode-freewheeling rms adalah :
2 1 2 _
2
2
⎟
⎠
⎞
⎜
⎝
⎛ +
=
+
=
π
α
π
π
α
π
a a rms fdI
I
I
1-20Daya Masukan =(Teg.Sumber rms) x (Arus sumber rms) rms
s s masukan V I
P = . _ 1-21
Daya yang diberikan ke Motor adalah : a t a a a a a a a a I I r E I r I V I E . + 2. =( + . ) = . 1-22
Faktor tenaga masukan adalah :
rms s s a t rms s s a a a a I V I V I V r I I E pf _ _ 2 . . . . . + = = 1-23
Gambar 7b : Bentuk Gelombang Keluaran
Gambar 7.: Penggerak konverter setengah gelombang satu fasa
Contoh 1
Motor dc penguat terpisah dikendalikan dengan penyearah terkontrol setengah gelombang satu-fasa 230 V,50 Hz.Medan motor dikendalikan dengan penyearah terkontrol setengah jembatan dengan tunda sudut penyalaan nol derajat. Resistansi motor ra = 0.7 ohm dan konstanta motor k = 0.5 V-detik / rad, torsi motor 15 Nm pada kecepatan 1000 rpm dan arus motor kontinyu dan bebas ripple, tentukan :
a. Tunda sudut penyalaan dari konverter jangkarnya b. Arus Thyristor rms dan arus freewheeling-diode rms c. Faktor daya masukan dari konverter jangkarnya
Penyelesaian
a. Konstanta motor = 0.5 Nm/A = Km Tetapi torsi motor,
T
e=
K
m.
I
aJadi arus jangkar,
A
K
T
I
m e a30
5
.
0
15 =
=
=
Emf motor, Ea Km m x 52.36Volt
60 1000 . 2 5 . 0 = = =
ω
π
Untuk penyearah terkontrol setengah gelombang satu-fasa mengisi motor dc,
a a a m t
E
I
r
V
V
=
(
1
+
cos
)
=
2
π
α
1 Atau V x Vt (1 cos ) 52.36 30 0.7 73.36 2 230 . 2 1 = + = + =α
π
Jadi, 1 11
65
.
336
0230
2
2
36
.
73
cos
⎥
=
⎦
⎤
⎢
⎣
⎡
−
=
−x
x
π
α
Jadi, tunda sudut penyalaan dari konverter 1 adalah 65.3360
b. Arus Thyristor rms adalah :
rms s a a rms T I A I I I _ 2 1 2 1 2 _ 931 . 16 360 336 . 65 180 30 2 2 = = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − =
π
α
π
π
α
π
Arus diode-freewheeling rms adalah :
A
I
I
I
fd rms a a766
.
24
360
336
.
65
180
30
2
2
2 1 2 1 2 _=
⎟
⎠
⎞
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛ +
=
+
=
π
α
π
π
α
π
c. Faktor daya masukan adalah :
mengikuti
x
x
I
V
I
V
I
V
r
I
I
E
pf
rms s s a t rms s s a a a a5651
.
0
931
.
16
230
30
36
.
73
.
.
.
.
.
_ _ 2=
=
=
+
=
3.2.
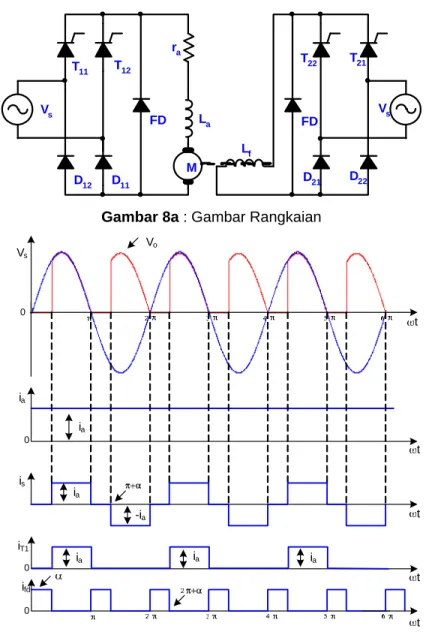
Penggerak Dengan Semi-Konverter Satu Fasa
Pada tipe ini, konverter yang digunakan pada rangkaian jangkarnya adalah sebuah semi-konverter satu fasa, yang mana rangkaian hubungannya seperti
pada gambar 8(a), akan memberikan harga rata-rata tegangan jangkarnya sebesar :
π
α
α
π
+
≤
≤
=
a a m auntuk
V
V
(
1
cos
)
0
1-24Seperti halnya penggerak konverter setengah gelombang, penggerak semi-konverter inipun hanya mampu beroperasi pada kwadran satu. Akan tetapi di dalam aplikasinya, mampu digunakan untuk daya sampai dengan 15 KW.
Sedang pada rangkaian medannya, digunakan sebuah semi-konverter yang lain, sehingga tegangan rata-rata pada rangkaian medannya adalah :
π
α
α
π
+
≤
≤
=
f f m funtuk
V
V
(
1
cos
)
0
1-25Jelas bahwa dari bentuk gelombang keluaran pada gambar 8b Arus sumber rms adalah :
2 1 _
⎥⎦
⎤
⎢⎣
⎡ −
=
π
α
π
a rms sI
I
1-26Arus thyristor rms adalah :
2 1 2 _
2
2
⎟
⎠
⎞
⎜
⎝
⎛ −
=
−
=
π
α
π
π
α
π
a a rms TI
I
I
1-27Arus diode-freewheeling rms adalah :
2 1 _
⎟
⎠
⎞
⎜
⎝
⎛
=
π
α
a rms fdI
I
1-28Faktor tenaga masukan adalah :
rms s s a t rms s s a a a a I V I V I V r I I E pf _ _ 2 . . . . . = + = 1-29
ra La M FD D11 D12 T11 T12 FD T21 T22 D21 D22 Lf Vs Vs
Gambar 8a : Gambar Rangkaian
0 t t t t t ia is ifd 0 0 0 iT1 ia ia ia -ia ia ia Vs Vo
Gambar 8b : Bentuk Gelombang Keluaran Gambar 8.: Penggerak semi-konverter satu fasa
Contoh 2
Sebuah motor dc penguat terpisah , dikendalikan dengan penyearah terkontrol setengah jembatan satu-fasa di kecepatan 1400 rpm, mempunyai tegangan masukan 330 sin 314.t dan back emf 80 Volt. Thyristor adalah di sulut secara simetris dengan sudut α = 300 dalam setiap setengah siklusnya dan resistansi jangkarnya 4 ohm.
Penyelesaian
Tegangan pada jangkarnya adalah
4 . 80 01 . 196 4 . 80 ) 30 cos 1 ( 330 ) cos 1 ( 0 a a a a a m t I I r I E V V V + = + = + + = + = =
π
α
π
Jadi arus jangkar rata-rata
A Ia 29.003 4 80 01 . 196 − = = emf motor, 60 1400 2 . K x K Ea m m m
π
ω
= =atau V rad atau Nm A
x x Km 0.546 det/ 0.546 / 1400 2 60 80 − = =
π
Jadi torsi MotorNm
x
I
K
T
e=
m a=
0
.
546
29
.
003
=
15
.
836
Contoh 3Kecepatan motor dc seri 1000 rpm, 15 hp, 220 Volt adalah dikendalikan dengan penyearah terkontrol satu-fasa setengah jembatan. Kombinasi tahanan jangkar dan tahanan medan adalah 0.2 ohm. Arus motor kontinyu dan bebas ripple, dan kecepatan 1000 rpm dan k = 0.03 Nm/A2, Tentukan :
a. Arus motor
b. Torsi motor untuk sudut penyalaan α = 300. Tegangan AC 250 Volt.
Penyelesaian
Untuk motor dc seri,
V
t=
E
a+
I
a(
r
a+
r
s)
Torsi motor,
T
e=
K
aφ
.
I
a.
Bila
tidak
saturasi
,
φ
=
CI
a 2 2 a a a e K CI kI T Jadi = =dimana k = konstanta dalam Nm/A2 maka
E
a=
K
aφω
m=
K
aCI
aω
m=
kI
aω
mkonstanta k dalam pernyataan Te dan Ea adalah sama.
a. Dari pernyataan diatas ,
V
t=
E
a+
I
a(
r
a+
r
s)
Atau)
(
)
(
)
cos
1
(
0 a a a s a m a a s m tE
I
r
r
kI
I
r
r
V
V
V
=
=
+
α
=
+
+
=
ω
+
+
π
Jadi a a a I I x x I x 3416 . 3 97 . 209 2 . 0 60 1000 2 03 . 0 ) 30 cos 1 ( 250 2 0 = + = +π
π
Jadi arus jangkar motor, Ia 62.84 A
3416 . 3 97 . 209 = = b. Torsi motor, Te =kIa2 =0.03(62.84)2 =118.466Nm
3.3.
Penggerak Dengan Konverter Gelombang Penuh Satu Fasa
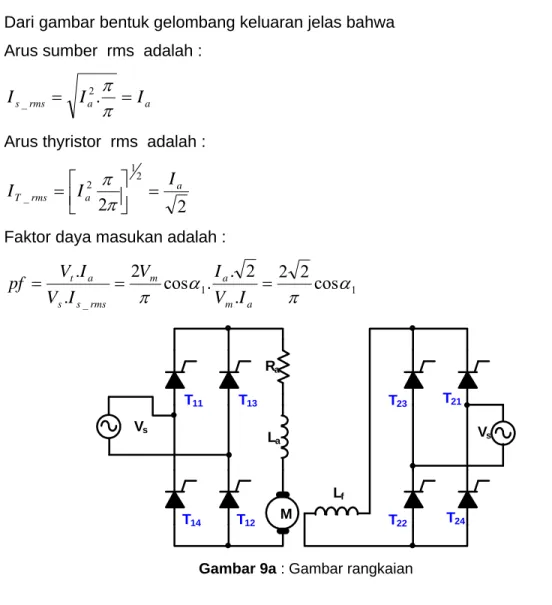
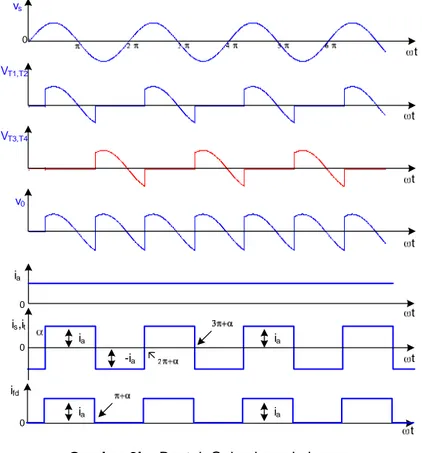
Pada tipe ini, tegangan jangkar dirubah oleh konverter gelombang penuh satu fasa, seperti yang ditunjukkan pada gambar 9(a). Selain itu, tipe ini mampu beroperasi pada dua kwadran, sehingga disebut juga sebagai penggerak dua kwadran (two quadrant drives) seperti pada gambar 9(b) dan di dalam aplikasinya mampu untuk daya sampai dengan 15 KW. Bentuk gelombang dari arusnya untuk beban induktif yang tinggi adalah seperti yang ditunjukkkan pada gambar 9(c). Dalam hal ini, proses regenerasi untuk pembalikan arah dari aliran dayanya, dilakukan dengan membalik medan penguatannya, sehingga tegangan baliknya akan berubah polaritasnya. Untuk melakukan ini semua, maka diperlukan sebuah konverter gelombang penuh pada rangkaian medannya.
Dari keluaran konverter gelombang penuh akan memberikan harga rata-rata dari tegangan jangkarnya sebesar :
π
α
α
π
≤
≤
=
m a a auntuk
V
V
2
cos
0
1-30Sedang untuk harga rata-rata dari tegangan medannya adalah
π
α
α
π
≤
≤
=
f f m funtuk
V
V
2
cos
0
1-31Dari gambar bentuk gelombang keluaran jelas bahwa Arus sumber rms adalah :
a a rms s
I
I
I
=
=
π
π
.
2 _ 1-32Arus thyristor rms adalah :
2
2
2 1 2 _ a a rms TI
I
I
=
⎥⎦
⎤
⎢⎣
⎡
=
π
π
1-33Faktor daya masukan adalah :
1 1 _
cos
2
2
.
2
.
.
cos
2
.
.
α
π
α
π
=
=
=
a m a m rms s s a tI
V
I
V
I
V
I
V
pf
1-34 T11 T14 T13 T12 Ra La Vs Lf T23 T22 T21 T24 Vs M0 t vs VT1,T2 VT3,T4 v0 t t t t t t ia is,it ifd 0 0 0 ia ia -ia ia ia
Gambar 9b : Bentuk Gelombang keluaran
Gambar 9. : Penggerak konverter gelombang penuh satu fasa
Contoh 4
Motor dc penguat terpisah, rating torsi beban 85 Nm pada kecepatan 1200 rpm. Tahanan medan 200 ohm dan tahanan jangkar 0.2 ohm. Kumparan jangkar dihibungkan dengan penyearah terkontrol gelombang penuh satu-fasa 400 volt dengan sudut tunda penyalaan nol derajat. Rangkaian jangkar dihubungkan dengan penyearah terkontrol yang sama. Konstanta motor 0.8 V-detik/A-rad. Arus medan dan arus jangkar bebas ripple, tentukan :
a. Rating arus jangkar
b. Tunda sudut penyalaan dari konverter jangkarnya pada rating beban c. Pengaturan kecepatan di beban penuh
Penyelesaian
a. Untuk konverter medan, tunda sudut penyalaan = 00
Jadi tegangan medan, V Vm x Volt
f 360 400 2 2 2 = = =
π
π
Arus medan, Amper
r V I f f f 1.8 200 360 = = =
Dengan mengabaikan saturasi magnetik,
φ
= K1IfJadi, Ea =Ka
φω
m =KaK1Ifω
m =K1Ifω
mDimana K mempunyai satuan V-detik/A-rad. Dengan cara yang sama,
Te = Ka
φ
Ia =KaK1IfIa = KIfIaJadi
85
=
0
.
8
x 8
1
.
I
aRating arus jangkar, Amper
x Ia 59.03 8 . 1 8 . 0 85 = = b. Tegangan terminal
V
t=
V
0=
2
V
mcos
α
1=
E
a+
I
ar
a=
KI
fI
aπ
atau Volt x x x x x 77 . 192 81 . 11 96 . 180 2 . 0 03 . 59 60 1200 2 8 . 1 8 . 0 cos 400 2 2 1 = + = + =π
α
π
atauα
1=
57
.
63
0c. Pada sudut penyalaan yang sama 57.630, emf motor pada keadaan tanpa beban
Ea =Vt =V0 =192.77 V = KIf
ω
m0Jadi kecepatan tanpa beban,
rad
ik
x
KI
E
f a m133
.
87
/
det
8
.
1
8
.
0
77
.
192
0=
=
=
ω
atau N = 1278.35 rpmPengaturan kecepatan di beban penuh % 53 . 6 100 1200 1200 35 . 1278 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − = x penuh beban kecepatan penuh beban kecepatan beban tanpa Kecepatan
d. Power faktor masukan dari konverter jangkarnya
mengikuti
x
x
I
V
I
V
rms a s a t0
.
4819
03
.
59
400
03
.
59
77
.
192
_=
=
3.4.1 Penggerak Dengan Konverter Ganda Satu Fasa.
Pada prinsipnya penggerak ini menggunakan dua buah konverter gelombang penuh satu fasa pada rangkaian jangkarnya, yang mana salah satu konverternya (konverter 1) akan beroperasi untuk mensuplai tegangan positif pada jangkarnya (+Va), sedang konverter yang lain (konverter 2) akan beroperasi guna
mensuplai tegangan negatif pada jangkarnya (-Va). Gambar rangkaiannya adalah
seperti yang ditunjukkan pada gambar 10.
Oleh karena pemakaian dua konverter pada rangkaian jangkarnya, penggerak ini mampu beroperasi pada ke-empat kwadrannya, sehingga disebut juga sebagai penggerak empat kwadran (four quadrant drives). Di dalam pengoperasiannya nanti, penggerak ini mempunyai empat(4) model (daerah) pengoperasian, yaitu : • Daya maju (forward powering), di kwadran satu,
• Pengereman maju (forward braking), di kwadran dua, • Daya balik (reverse powering), di kwadran tiga,
• Pengereman balik (reverse braking), di kwadran empat.
Polaritas dari arus medannya dibalik pada saat regenerasi (pengereman) maju dan balik berlangsung. Untuk itu diperlukan sebuah konverter gelombang penuh pada rangkaian medannya, sehingga mampu melakukan pembalikan arus medannya.
Bila konverter 1 beroperasi dengan sudut tunda
α
a1, maka akan memberikan tegangan jangkar rata-rata sebesar :π
α
α
π
≤
≤
=
2
cos
a10
a1 m auntuk
V
V
1-22Dan bila konverter 2 beroperasi dengan sudut tunda
α
a2, maka akan memberikan tegangan jangkar rata-rata sebesar :π
α
α
π
≤
≤
=
2
cos
a20
a2 m auntuk
V
V
1-35 dimana :α
a2=
(
π
−
α
a1)
Kemudian dengan konverter gelombang penuh pada rangkaian medannya, maka akan memberikan tegangan rata-rata pada rangkaian medannya sebesar :
π
α
α
π
≤
≤
=
f f m funtuk
V
V
2
cos
0
1-36Gambar 10 : Penggerak Konverter Ganda Satu Fasa
4. Penggerak Motor Arus Searah Tiga Fasa
Di dalam penggerak tiga fasa ini, rangkaian jangkar dari motor DC dihubungkan dengan keluaran dari penyearah tiga fasa yang dikontrol atau keluaran dari konverter AC-DC tiga fasa dengan komutasi yang dipaksakan
(forced commutated three-phase ac-ac converter). Oleh karena itu ripple dari tegangan jangkarnya menjadi berkurang (lebih kecil) dibandingkan pada penggerak satu fasa, dan pada rangkaian jangkarnya hanya diperlukan suatu induktansi yang relatif kecil guna mengurangi ripple-nya.
Penampilan dari penggerak tiga fasa ini akan menjadi lebih baik dibandingkan penggerak satu fasa, karena arus jangkarnya (yang sebagaian besar) suduh kontinyu. Demikian juga di dalam aplikasinya mampu digunakan untuk daya-daya yang tinggi hingga mencapai tingkat MegaWatt. Seperti halnya penggerak satu fasa, penggerak tiga fasa ini dapat digolongkan juga menjadi beberapa jenis, yaitu 1. Penggerak dengan konverter setengah gelombang tiga fasa (three phase
half-wave converter drivers),
2. Penggerak dengan semi-konverter tiga fasa (three phase semi converter
drives),
3. Penggerak dengan konverter gelombang penuh tiga fasa (three phase
full-converter drives),
4. Penggerak dengan konverter ganda tiga fasa (three phase dual-converter
drives).
4.1.
Penggerak Dengan Konverter Setengah Gelombang Tiga - Fasa
Penggerak tipe ini, disebut juga sebagai penggerak dua kwadran, karena hanya mampu beroperasi pada dua kwadran saja, dan di dalam aplikasinya mampu untuk daya-daya sampai dengan 40 KW. Selain itu, tipe ini juga tidak biasa digunakan dalam industri karena sumber AC-nya mengandung komponen DC. Kemudian untuk rangkaian medannya dapat menggunakan semi-konverter satu fasa atau tiga fasa.
Dengan konverter setengah gelombang tiga fasa pada rangkaian jangkarnya, maka akan memberikan tegangan rata-rata pada jangkarnya sebesar :
π
α
α
π
≤ ≤ = m a a a untuk V V cos 0 2 3 3 1-37Dimana Vm adalah tegangan maksimum (puncak) dari sumber AC tiga fasanya
Sedang untuk rangkaian medannya, karena menggunakan semi-konverter tiga fasa, maka akan memberikan harga rata-rata dari tegangannya sebesar :
π
α
α
π
+ ≤ ≤ = m f f f untuk V V (1 cos ) 0 2 3 3 1-38Jelas bahwa dari bentuk gelombang keluaran pada gambar 11b Arus jangkar rms adalah :
a rms
a I
I _ = 1-39
Arus fasa rms adalah :
3
1
2
1
.
3
2
2 _rms a a sI
I
I
=
=
π
π
1-40Arus thyristor rata-rata adalah :
a a rata rata T I I I 3 1 2 1 . 3 2 . _ − =
π
=π
1-41Arus thyristor rms adalah :
3
1
_ _rms s rms a TI
I
I
=
=
1-42T1 T2 T3 T1 T2 T3 T1 t t t t 0 vs Vo,Vt 0 0 0 ia iA,iT1 ia va vb vc va vb vc va vb vc
Gambar 11b : Bentuk Gelombang Keluaran
Gambar 11: Penggerak Dengan Konverter Setengah Gelombang Tiga-Fasa
Contoh 5
Kecepatan motor dc penguat terpisah dikontrol dengan penyearah terkontrol setengah jembatan tiga-fasa 415 Volt, 50 Hz.Konstanta motor Km =1.5 V/rad/detik(Nm/A), induktansi 10 mH, resistansi 0.9 ohm.
Tentukan kecepatan motor pada torsi 50 Nm jika konverter tersebut di sulut pada α = 450.
Penyelesaian
Konstanta motor, Km = 1.5 V/rad/detik Torsi motor,
T
e=
K
aI
a=
50
Nm
Jadi arus jangkar motor,
A
K
T
I
m e a33
.
333
5
.
1
50 =
=
=
Persamaan kombinasi konverter motor adalah
a a m m a a a m
r
I
K
r
I
E
V
+
=
+
=
+
α
ω
π
(
1
cos
)
.
2
.
3
1 30 . 5 . 1 3 . 478 9 . 0 333 . 33 . 5 . 1 ) 45 cos 1 ( . 2 415 . 2 . 3 + = + = + m m x x xω
ω
π
Jadi m 298.867rad/detik 5 . 1 30 3 . 478 − = =
ω
Atau N m 298.867rad/detik
60 .
2
π
=ω
=Maka kecepatan motor adalah
rpm x N 2853.97 . 2 60 867 . 298 = =
π
Contoh 6Sebuah motor dc penguat terpisah 600 V, 1500 rpm, 80 A adalah dikontrol dengan penyearah terkontrol setengah jembatan tiga-fasa 400 Volt. Resistansi jangkar motor adalah 1 ohm dan asumsi arus jangkar motor konstan.
a. Untuk sudut penyalaan 450 pada kecepatan 1200 rpm, tentukan arus sumber rms dan arus thyristor rms, arus thyristor rata-rata dan power faktor masukan. b. Ulangi bagian a. dengan sudut penyalaan 900 pada kecepatan 700 rpm.
Penyelesaian
Pada kondisi operasi ,
V
t=
E
a+
I
ar
a=
K
mω
m+
I
ar
a 1 80 60 1500 2 600=Kmπ
x + xmaka konstanta motor adalah :
) / ( / det 31 . 3 1500 2 60 520 A Nm atau rad ik V x x Km = = −
π
a. Untuk kombinasi konverter-motor
V
t=
V
m+
α
=
E
a+
I
ar
a=
K
mω
m+
I
ar
aπ
(
1
cos
)
.
2
.
3
1 a a I x I x x x + = + = + 95 . 415 01 . 461 1 60 1200 . 2 31 . 3 ) 45 cos 1 ( . 2 400 2 3π
π
Arus sumber rms adalah :
A
I
I
s rms a36
.
791
3
2
06
.
45
3
2
_=
=
=
Arus thyristor rms adalah :
A
I
I
T rms a26
.
015
3
1
06
.
45
3
1
_=
=
=
Arus thyristor rata-rata adalah :
A I IT rata a .45.06 15.02 3 1 3 1 _ = = =
Power faktor masukan adalah :
mengikuti
x
x
x
I
V
I
V
pf
rms s s a t s0
.
815
791
.
36
400
3
06
.
45
01
.
461
.
.
3
.
_=
=
=
b.(
)
1
60
700
.
2
31
.
3
90
cos
1
.
2
400
2
3
x
I
x
x
x
V
t=
+
=
+
aπ
π
270
.
05
=
242
.
64
+
I
aJadi arus jangkar,
I
a=
27
.
41
A
Arus sumber rms adalah
I
s rmsI
a22
.
38
A
3
2
41
.
27
3
2
_=
=
=
Arus thyristor rms adalah
A
I
I
T rms a15
.
825
3
1
41
.
27
3
1
_=
=
=
Arus thyristor rata-rata adalah
A I IT rata a 9.137 3 41 . 27 3 1 2 _ = = =
Power faktor masukan adalah
mengikuti
x
x
x
I
V
I
V
pf
rms s s a t s0
.
4774
38
.
22
400
3
41
.
27
05
.
270
.
.
3
.
_=
=
=
4.2.
Penggerak Dengan Semi-Konverter Tiga Fasa
Penggerak tipe ini, digolongkan sebagai penggerak satu kwadran, karena hanya mampu beroperasi di kwadran satu saja, dan di dalam aplikasinya dibatasi hanya untuk daya-daya sampai dengan 115 KW. Seperti halnya penggerak konverter setengah gelombang, penggerak inipun menggunakan semi-konverter satu fasa atau tiga fasa pada rangkaian medannya.
Tegangan rata-rata pada rangkaian jangkarnya diperoleh dari keluaran semi-konverter tiga fasa, sehingga besarnya adalah :
π
α
α
π
+ ≤ ≤ = a a m a untuk V V (1 cos ) 0 2 3 3 1-43Kemudian untuk tegangan rata-rata pada rangkaian medannya adalah sama, yaitu diperoleh dari keluaran semi-konverter tiga fasa :
π
α
α
π
+ ≤ ≤ = m f f f untuk V V (1 cos ) 0 2 3 3 1-44Gamabr 12b : Bentuk Gelombang Keluaran
Gambar 12 : Penggerak Dengan Semi-Konverter Tiga-Fasa
4.3.
Penggerak Dengan Konverter Gelombang Penuh Tiga Fasa
Penggerak konverter gelombang penuh tiga fasa ini adalah merupakan penggerak dua kwadran, dan di dalam aplikasinya dibatasi hanya untuk daya-daya sampai dengan 1500 KW. Dalam proses regenerasi (pengereman) untuk membalik arah aliran dayanya, dilakukan dengan jalan membalik medan penguatannya hingga tegangan baliknya akan berubah polaritasnya. Untuk itu konverter pada rangkaian medannya harus konverter gelombang penuh satu fasa atau tiga fasa, sehingga akan mampu membalik polaritas dari arus medannya. Karena pada rangkaian jangkarnya menggunakan konverter gelombang penuh tiga fasa, maka akan memberikan tegangan rata-rata sebesar :
π
α
α
π
≤ ≤ = m a a a untuk V V cos 0 2 3 3 1-45Sedang untuk tegangan rata-rata pada rangkaian medannya adalah :
π
α
α
π
≤ ≤ = f f m f untuk V V cos 0 2 3 3 1-46Jelas bahwa dari bentuk gelombang keluaran pada gambar 13b, Arus jangkar rms adalah :
a rms
a I
I _ = 1-47
Arus fasa rms adalah :
3
2
1
.
3
2
2 _rms a a sI
I
I
=
=
π
π
1-48Arus thyristor rata-rata adalah :
a a rata rata T I I I 3 1 2 1 . 3 2 . _ − =
π
=π
1-49Arus thyristor rms adalah :
3
1
2
1
3
2
2 _rms a a TI
I
I
=
=
π
π
1-50 T11 T13 T15 T14 T16 T12 Ra La M Lf T25 T23 T21 T22 T26 T24 A B C A B C V0 = Vt ia iT1 iA a b cGambar 13b : Bentuk Gelombang Keluaran
Gambar 13: Penggerak Dengan Konverter Gel.Penuh Tiga Fasa
Contoh 7
Sebuah motor dc penguat terpisah 100 Kw, 500 V, 2000 rpm adalah dikendalikan dengan penyearah terkontrol tiga-fasa gelombang penuh 400 V, 50 HZ. Rugi tegangan konduksi thyristor 2 Volt. Parameter motor dc adalah :
Ra = 0.1Ω, Km = 1.6 V-det/rad, La = 8 mH.
Rating arus jangkar = 210 A. Arus jangkar tanpa beban = 10% Arus jangkar adalah kontinyu dan bebas ripple.
a. Tentukan kecepatan tanpa beban pada sudut penyalaan 300
b. Tentukan sudut penyalaan untuk kecepatan 2000 rpm pada rating arus jangkar dan tentukan juga power faktor suplai.
c. Tentukan pengaturan kecepatan untuk sudut penyalaan yang diperoleh dari bagian b.
Penyelesaian
a. Tegangan terminal motor adalah ;
V0 =Vt = 3 2x400cos30=467.75V
π
danV
t=
E
a+
I
ar
a+
2
atau
467
.
75
=
K
mω
m+
21
x
0
.
1
+
2
Jadi kecepatan motor tanpa beban adalah :
m rad/det 2767.2rpm 6 . 1 1 . 4 75 . 467 − = =
ω
b. Di rating arus jangkar dan pada kecepatan 2000 rpm
V
0=
V
t=
K
mω
m+
I
ar
a+
2
atau Volt x x x x 1 . 358 2 1 . 0 210 60 2000 . 2 6 . 1 cos 400 2 3 = + + =π
α
π
Maka 1 48.470 400 2 3 1 . 358 cos ⎥= ⎦ ⎤ ⎢ ⎣ ⎡ = − x xπ
α
Arus sumber rms adalah :
I
s rmsI
a171
.
46
A
3
2
210
3
2
_=
=
=
Power faktor masukan adalah :
mengikuti
x
x
x
I
V
I
V
pf
rms s s a t0
.
633
46
.
171
400
3
210
10
.
358
3
.
_=
=
=
c. Di rating beban, kecepatan adalah 2000 rpm, tegangan terminal jangkar Vt =358.1 Volt dan sudut penyalaan 48.470. Di sudut penyalaan ini, maka
V
0=
V
t=
358
.
1
=
K
mω
m+
21
x
0
.
1
+
2
ataum rad/det atau 2112.8 rpm
6 . 1 41 1 . 358 − =
ω
Jadi pengaturan kecepatan adalah 100 5.64% 2000 2000 8 . 2112 − = = x
4.4.
Penggerak Dengan Konverter Ganda Tiga Fasa
Seperti halnya penggerak konverter ganda satu fasa, pada penggerak tiga fasa inipun digunakan dua(2) buah konverter. Dimana salah satu konverternya akan beroperasi sebagai penyearah (rectifier) yang mana akan mensuplai tegangan positif (+Va) pada rangkaian jangkarnya, sedang konverter yang lain
akan beroperasi sebagai inverter, yang akan mensuplai tegangan negatif (-Va)
pada rangkaian jangkarnya.
Penggerak ini juga merupakan penggerak empat kwadran, yang mana di dalam aplikasinya digunakan untuk daya-daya sampai dengan 1500 KW. Untuk membalik polaritas arus medannya, yang mana dilakukan saat regenerasi (pengereman) maju dan balik berlangsung, digunakan konverter gelombang penuh pada rangkaian medannya.
Bila
α
a1 adalah sudut tunda dari salah satu konverter pada rangkaianjangkarnya, maka tegangan rata-rata yang akan diberikan adalah :
π
α
α
π
≤ ≤ = 3 3 a1 0 a1 m a coc untuk V V 1-51Dan
α
a2 adalah sudut tunda dari konverter yang lain pada rangkaian jangkarnya, maka tegangan rata-ratanya adalah :π
α
α
π
≤ ≤ =3 3 a2 0 a2 m f coc untuk V V 1-52Sedang pada rangkaian medannya, akan diperoleh tegangan rata-rata dari konverter gelombang penuh tiga fasa sebesar :
π
α
α
π
≤ ≤ = af af m f coc untuk V V 3 3 0 1-53Ea
A
B
C
r
aL
ar
f1
2
v
o= v
t1 fase atau 3 fasa f.c
Gambar 14 : Penggerak Dengan Konverter Ganda Tiga Fasa
5. Kendali Untaian Tertutup Dari Penggerak Motor Arus Searah (DC)
Pada dasarnya kecepatan dari motor DC berubah terhadap torsi bebannya. Untuk menjaga kecepatannya agar tetap konstan, tegangan jangkarnya (ataupun tegangan medannya) harus dikendalikan secara kontinyu dengan jalan mengendalikan sudut tunda dari konverter-konverter (AC-DC) yang digunakan. Di dalam prakteknya, sistem-sistem penggerak diperlukan untuk mengoperasikan suatu motor-motor DC pada torsi yang konstan atau pada daya yang konstan, dan pada umumnya dilengkapi pula dengan pengendalian percepatan dan perlambatan.
Sebagian besar penggerak, di dalam industri biasa dioperasikan sebagai suatu sistem untaian tertutup (yang mana dilengkapi dengan faktor umpan balik). Karena sebuah sistem kendali untaian tertutup mempunyai keuntungan-keuntungan :
• Untuk meningkatkan akurasi,
• Respon (tanggapan) dinamik yang cepat,
• Pengaruh dari gangguan-gangguan pada beban dapat dikurangi, dan • Merupakan sistem yang tidak linier.
Gambar 15. Menunjukkan blok diagram dari sebuah sistem kendali untaian tertutup untuk motor DC dengan penguatan terpisah. Apabila kecepatan dari motor menurun oleh karena torsi beban yang bertambah, error kecepatan Ve akan
naik. Kemudian pengendali kecepatan (speed controller) akan memberikan
tanggapan atas kesalahan tersebut dengan menaikkan kendali sinyalnya Vc.
Kenaikan kendali sinyal Vc ini menyebabkan perubahan sudut tunda dari
konverternya yang selanjutnya akan menaikkan tegangan jangkar dari motor. Kenaikan tegangan jangkar ini akan membangkitkan torsi yang lebih, sehingga mampu mengembalikan kecepatan motor pada kecepatan aslinya.
Pada umumnya penggerak akan melalui (mengalami) suatu perioda transient selama torsi yang dibangkitkan oleh motor mencapai harga yang sama dengan torsi bebannya.
Kendali
kecepatan Konverter Motor DC
Sensor kecepatan Ve Vc Va Vr + -Power Supply TL
Gambar 15. : Blok diagram sistem untaian tertutup motor DC
5.1.
Fungsi Alih Untaian Terbuka
Karakteristik- Karakteristik penggerak DC pada kondisi setimbang yang mana sudah dibicarakan sebelumnya, adalah merupakan unsur-unsur utama di dalam pemilihan dari jenis penggrak-penggerak DC, akan tetapi unsur-unsur tersebut masih belum cukup, apabila penggerak tersebut akan dioperasikan dalam suatu sistem kendali untaian tertutup. Pengetahuan tentang sifat-sifat dinamik, yang mana biasa diekpresikan ke dalam bentuk sebuah fungsi alih, adalah sangat penting di dalam sistem kendali.
Va ia Ra La Rf Lf if Vf ω Td TL B J + -+ -eg -+ Penguat Dari Konverter K2 Suplai Tenaga AC + -M Vr
Gambar 16 : Konverter yang dihubungkan pada motor DC penguat terpisah
Gambar 16. Menunjukkan susunan rangkaian dari sebuah konverter yang dihubungkan dengan motor DC berpenguatan terpisah, dimana merupakan suatu sistem kendali terbuka. Dalam hal ini kecepatan motor diubah dengan
mengendalikan tegangan referensinya Vr. Dengan mengasumsikan bahwa
penguatan dari konverternya adalah K2 , maka tegangan jangkar dari motornya
adalah : r
a
K
V
V
=
2 1-54Kemudian dengan menganggap bahwa selama adanya gangguan transient arus medan If dan konstanta dari tegangan balik Kv , tetap konstan, maka persamaan
dari sistemnya adalah :
ω
f v g K I e = 1-55 g a m a m ae
dt
di
L
i
R
V
=
+
+
1-56dengan mensubsitusikan persamaan (1-55) ke dalam persamaan (1-56) maka diperoleh :
ω
f v a m a m aK
I
dt
di
L
i
R
V
=
+
+
1-57Kemudian torsi yang dibangkitkan adalah :
L a f t d B T dt d J I I K T = =
ω
+ω
+ 1-58persamaan-sehingga pengubahan persamaan-persamaan (1-54), (1-57) dan (1-58) akan menghasilkan :
)
(
)
(
s
K
2V
s
V
a=
r 1-59 ) ( ) ( ) ( ) (s R I s sL I s K I s Va = m a + m a + v fω
1-60 ) ( ) ( ) ( ) ( ) (s K I I s sJ s B s T s Td = t f a =ω
+ω
+ L 1-61Dari persamaan (1-60), diperoleh arus jangkarnya sebesar :
)
1
(
)
(
)
(
)
(
)
(
)
(
+
−
=
+
−
=
a m f v a m m f v a as
R
s
I
K
s
V
R
sL
s
I
K
s
V
s
I
τ
ω
ω
1-62 dimana m m aR
L
=
τ
adalah dikenal sebagai time constant dari rangkaian jangkarmotor.
Kemudian dari persamaan (1-61), diperoleh kecepatan motornya sebagai berikut :
)
1
(
)
(
)
(
)
(
)
(
)
(
+
−
=
+
−
=
m L d L ds
B
s
T
s
T
B
sJ
s
T
s
T
s
τ
ω
1-63 dimanaB
J
m=
τ
adalah dikenal sebagai mechanical time constant dari motor.Berdasarkan persamaan-persamaan (1-60), (1-62) dan (1-63), blok diagram dari sistem untaian terbuka dapat digambarkan seperti yang ditunjukkan pada gambar 17. Kemudian berdasarkan gambar 17, dapat dianalisa bahwa pada sistem tersebut terdapat dua kemungkinan gangguan yang disebabkan oleh kendali tegangan Vr dan torsi beban TL , sehingga tanggapan dari sistem tersebut pada
kondisi setimbang dapat ditentukan dengan mengkombinasikan masing-masing tanggapan yang disebabkan oleh Vr dan TL.
Tanggapan yang disebabkan oleh perubahan unit step (step change) dari
tegangan referensinya dapat ditentukan dengan mensetting TL = 0. Kemudian
dari gambar 17, kita bisa menentukan tanggapan dari kecepatannya yang disebabkan oleh tegangan referensi, sebagai berikut :
B
R
I
K
s
s
B
R
I
K
K
s
V
s
m f v m a m a m f v r(
)
(
)
1
(
)
/
)
/(
)
(
)
(
2 2 2+
+
+
+
=
τ
τ
τ
τ
ω
1-64Sebaliknya, tanggapan yang disebabkan oleh perubahan dari torsi bebannya,
dapat ditentukan dengan mengeset Vr = 0, sehingga berdasarkan blok diagram
Gb. 17, untuk perubahan unit step (step change) dari torsi bebannya maka, akan diperoleh tanggapan dari kecepatannya, sebagai berikut;
B R I K s s s B s T s m f v m a m a a L ( ) ( ) 1 ( ) / ) 1 ( ) / 1 ( ) ( ) ( 2 2 + + + + + − =
τ
τ
τ
τ
τ
ω
1-65Dengan menggunakan teori harga akhir, hubungan keadaan setimbang dari
perubahan kecepatan,
∆
ω
yang disebabkan oleh perubahan setingkat daritegangan kontrolnya,
∆
Vr
dan perubahan unit step dari torsi bebannya, dapat ditentukan dari persamaan (1 – 62) dan (1 – 63) berturut-turut dengan memasukkan harga S = 0. TL ∆ r f v m f vV
I
K
B
R
I
K
K
∆
+
=
∆
2 2)
(
ω
1-66 L f v m m T I Kv B R R ∆ + − = ∆ 2 ) (ω
1-675.2. Fungsi Alih Untaian Tertutup
Untuk mengubah sistem untaian terbuka pada Gb. 17 menjadi sebuah sistem untaian tertutup, diperlukan pendeteksi kecepatan yang dihubungkan pada poros keluaran (output shaft) dari motornya. Keluaran dari pendeteksi ini, yang mana sebanding dengan kecepatannya, kemudian dikuatkan dengan faktor
penguatan K1 dan dibandingkan dengan tegangan referensinya, Vr untuk
menghasilkan tegangan kesalahan, V0. Gambar lengkap dari blok diagramnya
adalah seperti yang ditunjukkan pada Gb. 18.
Gambar. 18 : Blok diagram dari sistem kontrol loop tertutup untuk motor DC berpenguatan
terpisah.
Dengan demikian tanggapan dari sistem ini, yang disebabkan oleh perubahan unit step (step change) dari tegangan referensinya, dapat ditentukan dengan menganggap TL = 0, yaitu:
B
R
I
K
K
K
I
K
s
s
B
R
I
K
K
s
V
s
m f v f v m a m a m f v r[(
)
])
1
)
(
)
(
)
(
/
)
(
)
(
2 1 2 2 2+
+
+
+
+
=
τ
τ
τ
τ
ω
……….. 1-68sedang tanggapan yang disebabkan oleh adanya perubahan unit step dari torsi bebannya, dapat ditentukan dengan menganggap Vr = 0, yaitu;
B
R
I
K
K
K
I
K
s
s
s
B
s
T
s
m f v f v m a m a a L[(
)
]
1
)
(
)
(
)
1
(
)
/
1
(
)
(
)
(
2 1 2 2+
+
+
+
+
+
−
=
τ
τ
τ
τ
τ
ω
……….. 1-69Dengan menggunakan teori harga akhir, perubahan kecepatan pada kondisi setimbang,
∆
ω
yang disebabkan oleh adanya perubahan unit step dari tegangankontrolnya, dan torsi bebannya, dapat ditentukan dari persamaan (1 –
66) dan (1 – 67) dengan memasukkan harga S = 0 r
V
∆
∆
T
L r f v f v m f vV
I
K
K
K
I
K
B
R
I
K
K
∆
+
+
=
∆
2 1 2 2)
(
ω
1-70L f v f v m m T I K K K I K B R R ∆ + + − = ∆ 2 1 2 ) (