58 3.1 Diagram Blok Sistem
Suatu sistem penjaga jarak pada kendaraan merupakan hal yang dibutuhkan pada saat ini. Tetapi sistem penjaga jarak ini tidak terdapat pada semua kendaraan roda empat, hanya pada tipe-tipe kendaraan tertentu saja yang memiliki sistem ini. Prototype sistem penjaga jarak kendaraan ini dibuat untuk diaplikasikan pada kendaraan roda empat, yang salah satu tujuannya adalah untuk memperingati pengemudi dengan bunyi jika kendaraannya terlalu dekat dengan kendaraan ataupun objek lain disekitar kendaraan yang dikemudikannya. Rangkaian ini dipasang pada empat sisi kendaraan yaitu sisi depan, sisi kiri, sisi kanan, dan sisi belakang.
Sistem ini berkerja dengan beberapa rangkaian elektronik seperti sensor ultrasonik yang berfungsi sebagai input atau pemberi data untuk diproses oleh mikrokontroler, memanfaatkan mikrokontroler AVR yang telah dimasukkan program untuk memproses data yang diterima dari sensor. Dimana program yang terdapat didalam mikrokontroler dimasukkan kedalam mikrokontroler melalui kabel ISP dengan Software Downloader Code Vision AVR dengan bahasa pemrograman C yang kemudian data yang telah diproses dan memenuhi persyaratan dikirim melalui rangkaian mikrokontroler AVR dan diteruskan ke rangkaian LED dan buzzer sehingga menghasilkan nyala lampu dan bunyi alarm untuk memberi peringatan kepada pengemudi. Beberapa perangkat keras yang
digunakan pada sistem ini adalah komputer, kabel ISP, mikrokontroler AVR, sensor ultrasonik, catu daya, buzzer dan LED.
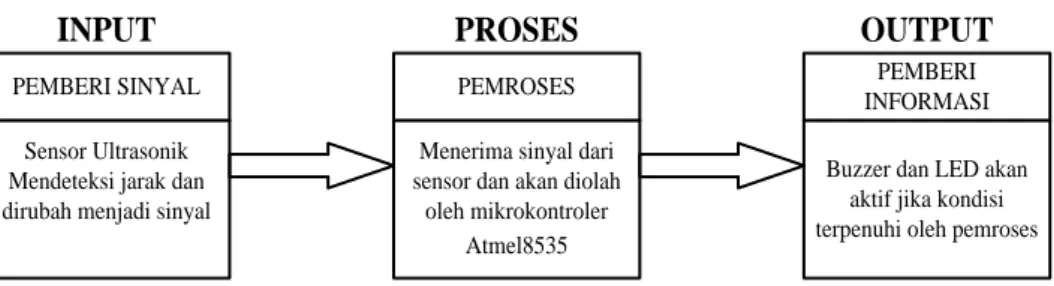
Gambar berikut merupakan cara kerja dari rangkaian keseluruhan yang dijelaskan dengan diagram blok.
PEMBERI SINYAL Sensor Ultrasonik Mendeteksi jarak dan dirubah menjadi sinyal
PEMBERI INFORMASI Buzzer dan LED akan
aktif jika kondisi terpenuhi oleh pemroses PEMROSES
Menerima sinyal dari sensor dan akan diolah
oleh mikrokontroler Atmel8535
INPUT PROSES OUTPUT
Gambar 3.1 Diagram Blok
3.2 Penjelasan Blok Sistem
Setiap sub-sistem pada perancangan ini mempunyai fungsi dan tugas masing-masing yang saling berkaitan satu dengan lainnya, terdapat 3 blok sub-sistem yang akan dijelaskan berkaitan dengan sub-sistem yang dibangun, diantaranya sebagai berikut :
1. Blok Pemberi Sinyal (Input)
Blok input ini merupakan rangkaian blok pemberi sinyal berupa sensor suara yang mendeteksi jarak dan arus yang terhubung diteruskan ke rangkaian blok pengolah. Rangkaian pemberi sinyal ini menggunakan modul DT-SENSE Ultrasonic and Infrared Ranger. Ultrasonic Ranger berkerja dengan cara memancarkan sinyal ultrasonik (yang memiliki frekuensi jauh di atas jangkauan pendengaran manusia) dan menghasilkan pulsa atau data keluaran yang menyatakan jarak yang ditempuh oleh sinyal tersebut sebelum menyentuh sebuah obyek dan memantul kembali.
2. Blok Pemroses
Rangkaian blok pemroses ini menggunakan modul mikrokontroler AVR, seri yang digunakan adalah ATmega8535. Mikrokontroller ATmega8535 merupakan tempat diisinya program yang berfungsi untuk memproses data yang didapat dari blok pemberi sinyal dan menentukan output pada buzzer. 3. Blok Pemberi Informasi (Output)
Blok pemberi informasi akan menyala jika pin pada mikrokontroller memberikan tegangan sebesar +5 Volt karena pada dasarnya blok pengolah berfungsi sebagai pengatur yaitu untuk menentukan salah satu pin yang akan hidup dan jika salah satu pin hidup maka akan mengeluarkan tegangan sebesar +5 Volt. Pada blok informasi buzzer akan berbunyi dan LED akan menyala sesuai dengan kondisi yang telah dibuat dalam program dan diisikan kedalam blok pengolah.
3.3 Komputer
Dalam perancangan sistem ini, komputer dipergunakan untuk melakukan pengisian program ke mikrokontroler AVR atau dilakukan secara komputerisasi, yaitu dengan menggunakan kabel ISP yang terhubung dari komputer ke mikrokontroler AVR untuk memasukkan program yang telah dibuat ke dalam mikrokontroler.
3.3.1 Spesifikasi Komputer
Untuk keperluan percobaan rangkaian dan pemrograman alat tersebut spesifikasi hardware komputer yang digunakan adalah sebagai berikut :
1. Prossesor : Intel Pentium M Processor 1.73 GHz 2. RAM : 1 GB
3. HDD : 80 GB 4. Monitor : 14 Inch
5. VGA : ATI Radeon Xpress 200M Series
(spesifikasi komputer di atas adalah spesifikasi komputer pribadi) Minimum Requarement :
1. Prossesor : P III 800 MHz 2. RAM : 128 MB
3. HDD : 40 GB
4. Monitor : 15 Inch
5. Keyboard dan Mouse : Standar Windows Compatible.
3.3.2 Software yang digunakan
Karena program aplikasi yang dirancang berbasis windows maka, kebutuhan software untuk pembuatan program adalah berikut :
1. Mendukung Sistem Operasi Windows 98, ME, 2000 dan XP
2. Microsoft Visio 2007
3.4 Perancangan Perangkat Lunak
Mikrokontroler merupakan komponen elektronika yang kinerjanya tergantung pada program yang dimasukkan dan telah bekerja didalamnya. Sebelum mikrokontroler digunakan dalam sistem rangkaian elektronika, harus terlebih dahulu diisi program yang telah dibuat oleh pembuat program. Hal ini bertujuan agar IC tersebut dapat bekerja sesuai dengan keinginan. Software yang digunakan untuk menuliskan listing program bahasaC adalah CodevisionAVR.
3.4.1 Diagram Alir Program ke Target Blok
Start
Menulis listing program Tool : text editor Hasil : file .asm / .c
C listing program Tool : CodeVisionAVR
Ada error ?
Hasil : file .hex
Download Program ke Chip Tool : Writter / Programer
Testing Sesuai keinginan ? End Debugging Ya Tidak Ya Tidak
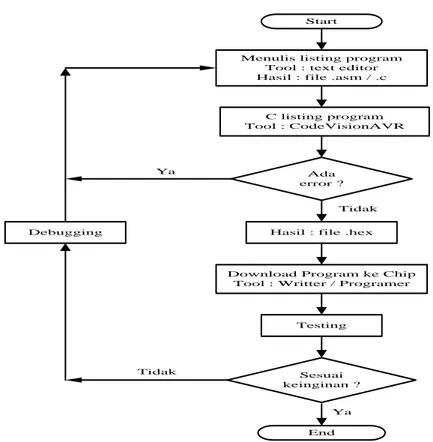
Gambar 3.2 Diagram Alir Program ke Target Blok
Pada diagram alir program ke target blok akan menggambarkan alur proses pembuatan listing program sampai dengan pengisian program kedalam mikrokontroler. Sehingga langkah-langkah dari diagram alir ini
dapat dijadikan tolok ukur apakah program bekerja sesuai dengan keinginan atau tidak, sehingga akan terlihat dengan jelas jika terjadi kesalahan atau error pada program yang akan diujikan.
3.4.2 Diagram Alir Cara Kerja Rangkaian Sensor Jarak
Diagram alir adalah penggambaran secara grafik dari langkah-langkah prosedur dari suatu program. Diagram alir membantu analis dan programmer untuk memecahkan masalah kedalam segmen-segmen yang lebih kecil dan membantu dalam menganalisis alternatif-alternatif lain dalam pengoperasian. Dalam perancangan rangkaian sensor jarak akan dijelaskan dalam gambar flowchart di bawah ini.
Start
Clr PB.0 = 0 Clr PB.2 = 0 Inisialisasi Sensor
Cek Sensor Depan “Jarak <= 2000” Set PB.0 = 1 Set PB.2 = 1 End Ya Tidak Switch “On” Ya Tidak Clr PB.1 = 0 Clr PB.2 = 0 Cek Sensor Samping
“Jarak <= 1000”
Set PB.1 = 1 Set PB.2 = 1
Tidak Ya
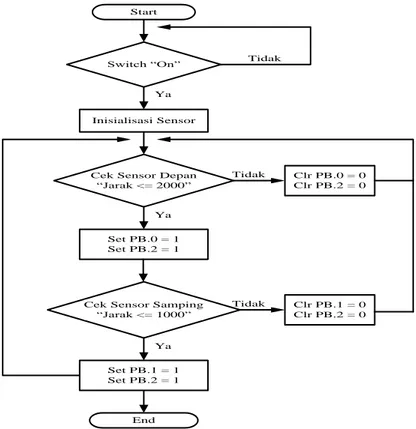
Proses yang akan dilakukan pada diagram alir rangkaian sensor jarak pertama kali adalah mengecek kondisi switch apakah dalam kondisi “on” atau tidak, kemudian melakukan proses inisialisasi sensor, jika sensor terhalang oleh suatu objek dengan jarak maksimum yang ditentukan pada program maka proses selanjutnya adalah memberikan nilai 1 atau aktif pada port B pin 0 dan pin 2 untuk sensor depan dan pin 1 dan pin 2 untuk sensor samping, jika tidak maka kondisi dalam keadaan sebaliknya memberikan nilai 0 atau tidak aktif. Kondisi ini akan terus berulang sampai kondisi switch menjadi “off”. Diagram alir seperti ini bisa disebut
dengan sistem kendali loop tertutup karena terjadi perulangan sinyal masuk, dimana hasil dari proses akan dijadikan umpan balik atau sebagai perbandingan sampai memberi keluaran ke nilai yang dikehendaki.
3.4.3 Rancangan Cara Kerja Sensor Jarak
1. Pertama, koneksikan rangkaian sensor ultrasonik ke rangkaian mikrokontroler AVR.
- Pin sinyal (3) pada sensor ultrasonik depan dikoneksikan ke pin 2 (PA.2) pada rangkaian mikrokontroler.
- Pin sinyal (3) pada sensor ultrasonik samping dikoneksikan ke pin 2 (PA.3) pada rangkaian mikrokontroler.
- Pin regulator tegangan (2) pada kedua buah sensor ultrasonik dikoneksikan ke pin 2 (VCC) pada rangkaian mikrokontroler.
- Pin ground (1) pada kedua buah sensor ultrasonik dikoneksikan ke pin 1 (GND) pada rangkaian mikrokontroler.
2. Kedua, koneksikan rangkaian buzzer ke rangkaian mikrokontroler AVR (PortB.1).
3. Ketiga, koneksikan rangkaian LED ke rangkaian mikrokontroler AVR (PortB.0) dan (PortB.1).
4. Keempat, hidupkan catu daya atau trafo dan di set pada tegangan +5V, kemudian dikoneksikan dengan rangkaian mikrokontroler AVR. 5. Kelima, ketika switch pada posisi “on” maka lampu indikator
berwarna hijau akan menyala dan status keseluruhan rangkaian dalam status “on”.
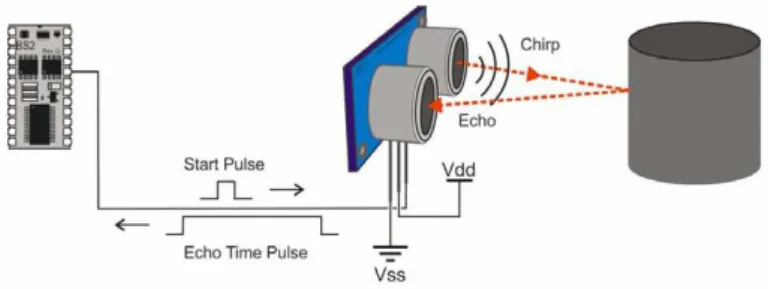
6. Keenam, sensor ultrasonik akan melepaskan gelombang ultrasonik dengan arah horizontal sesuai dengan posisi sensor secara terus-menerus dengan jangkauan yang telah diatur dalam program. Jika sinyal sensor ultrasonik terhalang oleh suatu objek, maka sensor ultrasonik akan mengirimkan data/sinyal ke mikrokontroler.
Gambar 3.4 Cara kerja sensor
7. Ketujuh, data/sinyal yang dikirimkan oleh sensor ultrasonik akan diproses oleh mikrokontroler dan akan menghasilkan suatu output.
8. Kedelapan, output yang dihasilkan oleh mikrokontroler akan diteruskan ke rangkaian buzzer dan LED sehingga buzzer akan berbunyi dan LED akan menyala, hasil inilah yang akan berfungsi sebagai pemberi informasi kepada pengguna.
3.5 Perancangan Perangkat Keras
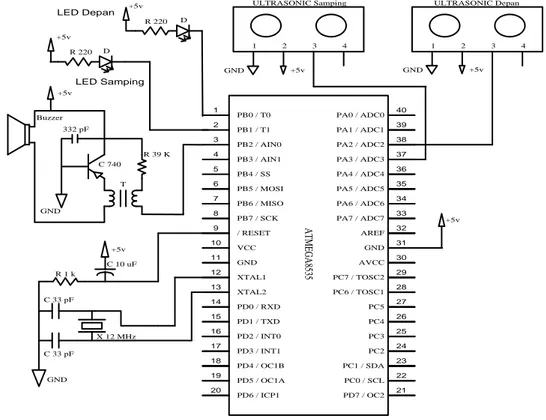
3.5.1 Gambar Keseluruhan Rangkaian
PA0 / ADC0 PA7 / ADC7 PA6 / ADC6 PA5 / ADC5 PA4 / ADC4 PA3 / ADC3 PA2 / ADC2 PA1 / ADC1 PB0 / T0 PB7 / SCK PB6 / MISO PB5 / MOSI PB4 / SS PB3 / AIN1 PB2 / AIN0 PB1 / T1 / RESET XTAL2 XTAL1 GND VCC PD0 / RXD PD6 / ICP1 PD5 / OC1A PD4 / OC1B PD3 / INT1 PD2 / INT0 PD1 / TXD AREF PC4 PC5 PC6 / TOSC1 PC7 / TOSC2 AVCC GND PC0 / SCL PC1 / SDA PC2 PC3 PD7 / OC2 1 5 4 3 2 6 10 9 8 7 11 15 14 13 12 16 20 19 18 17 40 36 37 38 39 35 31 32 33 34 30 26 27 28 29 25 21 22 23 24 GND +5v C 10 uF R 1 k C 33 pF C 33 pF X 12 MHz GND R 39 K C 740 T 332 pF +5v Buzzer ULTRASONIC Depan 4 1 2 3 GND +5v +5v +5v A T M E G A 85 35 ULTRASONIC Samping 4 1 2 3 GND +5v D D R 220 R 220 +5v LED Samping LED Depan
Gambar 3.5 Keseluruhan Rangkaian
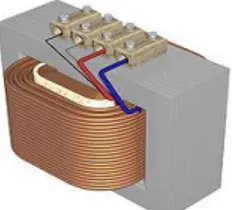
3.5.2 Transformator
Transformator atau transformer atau trafo adalah komponen elektromagnet yang dapat mengubah taraf suatu tegangan AC ke taraf
yang lain. Transformator bekerja berdasarkan prinsip induksi elektromagnetik. Transformator merupakan suatu peralatan listrik yang digunakan untuk mengubah energi listrik bolak-balik dari satu level tegangan ke level tegangan yang lain. Dapat menaikkan, menurunkan atau hanya untuk mengisolasi sistem satu dengan yang lainnya. Transformator
terdiri atas sisi primer dan sisi sekunder. Keduanya terhubung dengan inti besi, dalam kondisi ideal, tanpa rugi-rugi, perbandingan lilitan antara keduanya merupakan perbandingan tegangan antara kedua sisinya.
Namun pada kenyataannya, daya masukkan tidak pernah sama dengan daya keluaran. Terdapat rugi-rugi yang terjadi di inti besi dan lilitan. Rugi-rugi tersebut terjadi akibat histerisis, arus eddy, resistansi belitan dan fluks bocor.
Gambar 3.6 Transformator / Trafo ( http ://id.wikipedia.org/wiki/Transformator )
Bagian utama dari transformator antara lain : A. Inti Besi
Berfungsi untuk mempermudah jalan fluksi, yang ditimbulkan oleh arus listrik yang melalui kumparan. Dibuat dari lempengan – lempengan besi tipis yang berisolasi, untuk mengurangi panas (sebagai rugi-rugi besi ) yang ditimbulkan oleh Eddy Current.
B. Kumparan Transformator
Adalah beberapa lilitan kawat berisolasi yang membentuk suatu kumparan. Kumparan tersebut terdiri dari kumparan primer dan kumparan sekunder yang diisolasi baik terhadap inti besi maupun terhadap antar kumparan dengan isolasi padat seperti karton, pertinak dan lain-lain. Kumparan tersebut sebagai alat transformasi tegangan dan arus.
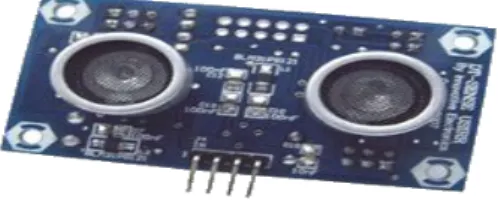
3.5.3 Sensor Ultrasonik
Sensor ultrasonik yang digunakan pada rangkaian ini adalah DT-SENSE Ultrasonic and Infrared Ranger. Modul ini merupakan pengukur jarak non-kontak yang sangat mudah dihubungkan dengan berbagai sistem berbasis mikrokontroler. Sensor ini berfungsi memancarkan sinyal ultrasonik (yang memiliki frekuensi jauh di atas jangkauan pendengaran manusia) dan menghasilkan pulsa atau data keluaran yang digunakan untuk menyatakan jarak yang ditempuh oleh sinyal tersebut sebelum menyentuh sebuah obyek dan memantul kembali.
Gambar 3.7 Sensor DT-SENSE UltraSonic
(
3.5.4 Mikrokontroler AVR
Arsitektur mikrokontroler AVR ini dirancang memiliki berbagai kelebihan yang mempunyai penyempurnaan dari arsitektur mikrokontroler-mikrokontroler yang sudah ada. Salah satu kelebihan tersebut adalah kemampuan In System Programming sehingga chip mikrokontroler AVR langsung dapat diprogram dalam sistem rangkaian aplikasi melalui aturan tertentu. Programnya dikembangkan menggunakan
compiller CodeVisionAVR V2.03.4.
Rangkaian mikrokontroler AVR merupakan modul single chip mikrokontroler ATmega8535 dengan 8 Kbyte Flash Memory, 512 byte SRAM, dan 512 byte EEPROM. DT-AVR Low Cost Micro System juga memiliki ADC hingga 8 channel single-ended A/D converter dengan resolusi 10 bit. Berdimensi 8,6 cm (P) x 7,2 cm (L) x 1,8 cm (T).
Gambar 3.8 Mikrokontroler AVR – Atmega8535
( http://www.innovativeelectronics.com/innovative_electronics/pro_dtavrlcm.htm )
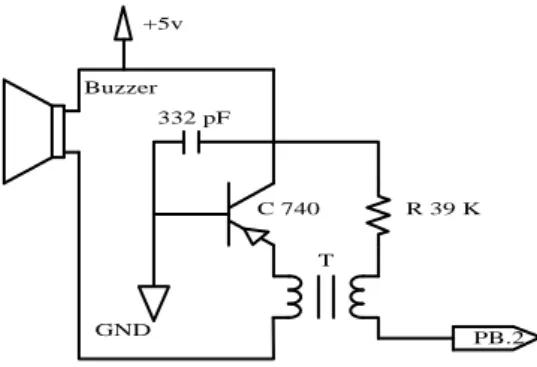
3.5.5 Rangkaian Buzzer
Merupakan rangkaian elektronik yang terdiri dari beberapa komponen elektronik yang dapat menghasilkan suara jika dialiri arus
listrik. Buzzer ( bel listrik ) banyak digunakan pada perangkat elektronik karena dapat menghasilkan suara sebagai indikator.
Rangkaian buzzer ini akan berbunyi jika pin pada mikrokontroler memberikan tegangan sebesar +5 Volt, dengan kondisi program yang telah dibuat diisikan kedalam mikrokontroler dan program tersebut yang berfungsi sebagai pengatur untuk menentukan salah satu pin yang akan aktif dan akan mengeluarkan tegangan sebesar +5 Volt sehingga buzzer akan berbunyi. GND R 39 K C 740 T 332 pF +5v Buzzer PB.2
Gambar 3.9 Rangkaian Buzzer
3.5.6 LED (Light Emition Diode)
LED merupakan kepanjangan dari Light Emition Diode atau dioda yang dapat memancarkan cahaya. Lampu led mempunyai dua kutub sama seperti halnya dioda biasa yang terdiri dari kutub anoda dan kutub katoda. Tegangan untuk menyalakan lampu led sebesar 2.2 Volt, tegangan sebesar ini adalah tegangan minimal yang harus ada pada saat ingin menyalakan lampu led di kedua ujung kutub anoda dan katoda. Untuk mencegah terjadinya kelebihan arus, lampu led harus diberi tahanan (resistor) agar
tidak mudah terbakar, ukuran dari tahanan resistor ini bergantung dari besar-kecilnya tegangan yang diberikan.
K A
Gambar 3.10 Bentuk Lampu Led
Cahaya yang dikeluarkan lampu led berwarna-warni dari warna hijau, biru, merah, kuning, putih, biru, dll. Untuk mengetahui polaritas dari lampu led yaitu jika ada tanda lingkaran yang terpotong pada bagian bawah lampu led, tanda ini merupakan tanda polaritas tegangan negative dan sebaliknya kutub yang satu lagi adalah polaritas tegangan positif.
3.5.7 Daftar Komponen
Sensor DT-SENSE (USIRR) 2X
ATmega8538 1X
Buzzer 1X
LED 2X
Trafo / Adapter 1X
Switch On/Off 1X
3.5.8 Peralatan Yang Dibutuhkan
Peralatan yang digunakan untuk mendukung proses perakitan rangkaian, adalah sebagai berikut :
1. Solder dengan daya 40 watt dan kawat timah 2. Kabel tunggal warna-warni, diameter 1 mm 3. Board PCB
4. Multitester Analog dan Digital 5. Kotak peralatan (Tool Box)
3.5.9 Mengintegrasikan CodeVisionAVR dengan ISP Programer Software CodeVisionAVR merupakan C compiler untuk mikrokontroler AVR. Pada CodeVision telah disediakan editor yang berfungsi untuk membuat program dalam bahasa C, setelah melakukan proses kompilasi kita dapat mengisikan program yang telah dibuat ke dalam mikrokontroler menggunakan program CodeVisionAVR.
Program yang didukung oleh CodeVision banyak sekali variasinya, antara lain: Atmel AVRProg (AVR910), Kanda Sistem STK200+/300,
Atmel STK500/AVRISP dan lain-lain. Agar de KITS AVR ISP Programmer Cable dapat diintegrasikan dengan CodeVision AVR, terlebih dahulu harus dilakukan konfigurasi sebagai berikut :
- Jalankan Software CodeVision AVR. - Pilih menu Setting → Programmer.
Gambar 3.11 Tampilan Pilihan Programmer
Setelah CodeVision dikonfigurasi, uji de KITS AVR ISP Programmer Cable dengan cara menghubungkannya dengan target board
dan ke PC melalui port USB.
Untuk melakukan pengujian terhadap de KITS AVR ISP
Programmer Cable dengan cara sebagai berikut:
Pasang AVR ISP Programmer Cable pada target board yang telah berisi mikrokontroler target.
- Pilih menu Tools Chip Programmer atau tekan Shift+F4.
- Pada jendela Chip programmer pilih menu Read Chip Signature. Apabila AVR ISP Programmer kabel tidak bekerja dengan baik dan ID mikrokontroler rusak, maka tipe tipe yang muncul adalah “Chip: Unknown”.
Setelah melakukan pemeriksaan pada de KITS AVR ISP Programmer kabel, hal selanjutnya adalah membuat proyek. Buka project file *.prj menggunakan CodeVisionAVR. Untuk memudahkan pemrograman, CodeVision harus dikonfigurasi terlebih dahulu dengan caranya sebagai berikut:
Pilih tab After build, kemudian centang pada kotak dengan label
Program the Chip. Klik pada tombol OK.
3.5.10 Penggunaan Kepustakaan ATMEL dalam bahasa C cross compiler.
Untuk mengintegrasikan C cross compiler dengan ATMEL, CodeVisionAVR mempunyai library yang digunakan untuk merubah bahasa C kedalam bilangan Hexadesimal (bahasa yang dikenal oleh mikrokontroler), dalam hal ini pengertian cross compiler adalah program dalam bahasa C yang di compile menjadi bilangan hexadesimal dan kemudian ditanam ke mikrokontroler dengan menggunakan CodeVisionAVR dan program yang ada didalam mikrokontroler tersebut bisa di ambil kembali dengan menggunakan CodeVisionAVR tetapi bahasa yang dihasilkan adalah bilangan hexadesimal. Berikut merupakan proses kompilasi program menggunakan CodeVisionAVR :
1. Program terlebih dahulu dibuat pada lembar Source di CodeVisionAVR.
2. Simpan program dengan extension “.C”.
3. Lakukan compile dengan menekan tombol ikon yang ada pada CodeVisionAVR.
4. Pada saat compile berlangsung, CodeVisionAVR akan melakukan pengecekan library mikrokontroler yang sudah ada dalam
CodeVisionAVR tersebut. Pengecekan dimulai dari Port, Intruksi bit, dsb kemudian mengecek apakah dalam penulisan program terdapat kesalahan pengetikan atau tidak.
5. Setelah proses kompilasi selesai dan berhasil maka CodeVisionAVR akan membuat file baru dengan extension “.H”, file inilah yang akan dikenal dan diprogram pada mikrokontroler untuk dapat dioperasikan.