1
Sistem Penangkap Citra Pelanggaran Lampu Merah
Muhtadin
1)Isrin Ramdani
2)Ahmad Zaini
2)1) Jurusan Teknik Elektro ITS, Surabaya 60111, email: [email protected] 2) Jurusan Teknik Elektro ITS, Surabaya 60111, email: [email protected]
3) Jurusan Teknik Elektro ITS, Surabaya 60111, email: z a i n i @ e e . i t s . a c . i d
Abstrak — Pada penelitian ini diimplementasikan suatu sistem penangkap citra pelanggaran traffic light, dimana input sistem berupa rekaman video yang diambil pada area traffic light dan output sistem berupa potongan-potongan video yang menunjukkan proses terjadinya pelanggaran
Untuk mendeteksi pelanggaran traffic light, aplikasi bekerja dengan cara melakukan pengolahan citra dan pengolahan video dari data rekaman video pada area traffic light yang diambil pada waktu siang, sore dan malam hari.
Dari pengujian yang dilakukan dengan cara mengambil sampel video pada saat siang, sore dan malam hari didapatkan hasil pendeteksian pelanggaran dengan tingkat keberhasilan rata-rata untuk mobil 90,3% dan 47,7% untuk motor pada video siang hari, 8,3% untuk mobil dan 59,66 % untuk motor pada video sore hari, dan 62,5% untuk mobil dan 46,19 % untuk motor pada video malam. Persentase kesalahan rata-rata dari sistem yaitu 11,36 % untuk mobil dan 64,5 % untuk motor pada video siang, 89,6 % untuk mobil dan 54,28 % untuk motor pada video sore, dan 37,7 % untuk mobil dan 65,7 untuk motor pada video malam.
Kata Kunci — Intelligent Transportation System, Red Light
Enforcement System, Lampu Lalu Lintas
I. PENDAHULUAN
Keamanan dan ketertiban lalu lintas merupakan suatu hal yang penting untuk menjaga keselamatan pengguna jalan. Selain petugas, Traffic light menjadi salah satu alat bantu untuk menjaga ketertiban lalu lintas. Seringkali terjadi pelanggaran pada area traffic light karena kurangnya pengawasan dari petugas. Kebanyakan dari pelanggaran traffic light mengakibatkan terjadinya kecelakaan yang memakan korban baik harta maupun nyawa. Untuk menghindari jatuhnya korban akibat pelanggaran traffic light, diperlukan suatu sanksi hukum yang berat bagi para pelanggar karena dianggap melanggar undang-undang [3]. Tindakan hukum bisa dilaksanakan jika pihak yang berwenang memiliki bukti yang kuat dari kejadian pelanggaran.
Tidak adanya petugas yang mengawasi area traffic light dapat memicu terjadinya pelangggaran traffic light. Petugas tidak dapat menindak para pelanggar karena tidak memiliki bukti yang kuat seperti nomor kendaraan dan bentuk fisik dari kendaraan. Untuk mengatasinya, petugas saat ini menggunakan kamera Closed Circuit Television (CCTV) untuk memantau area traffic light dan menugaskan seorang operator untuk memonitor terjadinya pelanggaran lewat
gambar hasil rekaman CCTV. Namun cara ini masih kurang efisien dari sisi waktu dan tenaga karena operator harus mengawasi video secara terus menerus dan mengidentifikasi nomor kendaraan pelanggar secara manual. Ada baiknya gambar yang diamati hanya gambar yang menunjukkan adanya pelanggaran dan gambar inilah yang akan diolah selanjutnya untuk mengetahui nomor kendaraan pelanggar. Untuk itu perlu dibangun suatu sistem yang mampu menangkap gambar pelanggaran traffic light secara otomatis.
Penelitian ini membangun sistem aplikasi penangkap gambar pelanggaran traffic light sebagai bagian dari Red Light Enforcement System (RLES). RLES termasuk ke dalam Enforcement Functions dari Intelligent Transportation System (ITS). RLES didefinisikan di sini sebagai alat perekam teknis yang dipicu secara otomatis oleh pelanggaran lalu lintas, sehingga informasi mengenai kendaraan yang melanggar direkam, yang memungkinkan identifikasi berikutnya dari kendaraan untuk tujuan sanksi pemilik atau driver.
Penelitian tentang Intelligent Transportation System (ITS) sudah banyak dilakukan oleh peneliti sebelumnya. Hal yang paling umum dilakukan pada Intelligent Transportation System (ITS) adalah mendeteksi kemacetan lalu lintas dengan cara menghitung jumlah kendaraan berdasarkan video pengamatan seperti yang dilakukan oleh [1], cara perhitungannya dapat menggunakan algoritma sederhana atau melalui algoritma tracking seperti pada [8]. Hasil dari [1] ditampilkan kedalam visualisasi yang terintegrasi seperti yang dilakukan oleh [2]. Selain kemacetan, topik lain yang dipelajari adalah pelanggaran lalu lintas seperti yang dilakukan oleh [5],[6] dan [7].
II. PERANCANGAN SISTEM
A. Desain Sistem
Sistem penangkap citra pelanggaran traffic light ini adalah implementasi dari pemrosesan citra digital. Input dari sistem ini berupa video yang diambil pada area traffic light. Output dari sistem adalah video yang menunjukkan pelanggaran traffic light dalam format .avi.
Sistem dibagi menjadi tiga bagian. Bagian pertama adalah pre-processing, bagian kedua segmentasi dan bagian ketiga adalah penyimpanan video dan data.
1. Pre Processing
Pre processing adalah persiapan awal sebelum video diproses untuk menghindari kesalahan pada saat running program. Pada bagian ini terdapat beberapa tahap, yaitu
2
Inisialisasi ROI, konversi video masukan ke Grayscale,me-rekonstruksi background yang nantinya akan menjadi background referensi dan pengambilan current frame. Gambar 1 menunjukkan tahapan-tahapan pre processing.
Convert to grayscale
Background
reconstruction Background Present Frame
Inisialisasi Setting ROI
Capture 1 frame Input
(video)
Gambar 1 Pre Processing
i. Inisialisasi ROI
Inisialisasi ROI yaitu penentuan dimana letak kendaraan akan dideteksi pada video. Inisialisasi ROI dilakukan dengan cara mengambil 1 frame dari video yang akan diolah. Melalui frame tersebut bisa ditentukan koordinat ROI untuk mendeteksi kendaraan pada video. Proses inisialisasi ROI bisa dilihat pada gambar 2
Gambar 2 Tampilan Inisialisasi ROI
ii. Konversi Video Input ke Citra Grayscale
Pada tahap ini dilakukan konversi dari citra input yang berupa citra RGB ke grayscale untuk mempermudah sistem dalam proses selanjutnya yaitu segmentasi. Dengan mengkonversikan citra RGB ke grayscale, sistem hanya bekerja pada 1 channel warna saja sehingga mengurangi kesalahan ketika diubah ke biner.
iii. Background Reconstruction
Background reconstruction dilakukan dengan cara membuat frame rata-rata dari frame-frame tertentu yang diolah sebelumnya yang nantinya akan menjadi background yang menjadi citra referensi dimana tidak ada objek di dalamnya.
Background didapatkan dengan cara menjumlahkan tiap frame dari video input selama selang waktu tertentu lalu dibagi dengan banyaknya
frame yang digunakan. Hasilnya, objek-objek didalam gambar akan hilang, dan yang tampak hanya citra yang sering tampak pada gambar saja
iv. Pengambilan Frame Saat Ini (Current Frame) Pengambilan current frame bertujuan untuk proses selanjutnya yaitu segmentasi. Frame ini nantinya dioperasikan bersama background hasil background reconstruction pada proses background substract
2. Segmentasi
Segmentasi merupakan proses untuk memisahkan objek dari backgroundnya dan untuk mendapatkan bentuk terbaik dari objek tanpa adanya noise agar nantinya memudahkan saat proses deteksi. Pada bagian ini ada beberapa tahap yaitu, background substract, tresholding, convert image to binary, erotion, dilation dan connected component.
Background Present Frame Tresholding Erode Dilate Get Connected Comp Segmentasi Absolute diff Convert to binary Gambar 3 Segmentasi i. Background Substract
Ide dasar segmentasi dari program ini adalah mendapatkan objek dengan cara background substract. Background didapatkan dengan mengolah sekumpulan gambar dari frame video seperti yang dibahas pada [4]. Background substract bekerja dengan cara mengurangkan citra referensi (dalam hal ini background) pada frame saat ini, dimana frame saat ini adalah background yang terdapat objek didalamnya. Secara matematis dapat ditulis demikian :
Dimana :
Hasil : hasil background substract Background : background yang digunakan Current Frame : frame video asli
3. Penyimpanan Data dan Video
Bagian terakhir dari aplikasi adalah penyimpanan informasi berupa data lokasi, tanggal, waktu dan video pelanggaran. Data lokasi, tanggal dan waktu pelanggaran disimpan ke database melalui koneksi Microsoft SQL Server. Data Video disimpan ke harddisk dengan format .avi. Video
3
yang disimpan dikompresi menggunakan codec xvid,sehingga menghemat ruang harddisk. Untuk keperluan pencarian video pelanggaran yang tersimpan di harddisk dapat dicari melalui user interface pencarian video seperti yang terlihat pada Gambar 4.
Gambar 4. User Interface Pencarian Video. i. Penyimpanan Video
Penyimpanan video merupakan proses penyimpanan potongan-potongan dari video input yang menunjukkan adanya pelanggaran traffic light yang bekerja secara otomatis. Acuan bagi program untuk mulai menyimpan video adalah saat simulasi lampu merah aktif dan ada objek yang melewati daerah ROI pada video input.
ii. Algoritma Penyimpanan Video
Algoritma untuk menyimpan video pelanggaran traffic light dapat dijelaskan pada langkah-langkah sebagai berikut :
1. Menentukan ROI untuk Mendeteksi Kendaraan Untuk mendeteksi kendaraan yang melanggar traffic light, pengamatan difokuskan pada area disekitar traffic light. Tepatnya pada area pembatas/marka jalan pada pemberhentian traffic light. Dengan demikian program akan segera menyimpan video jika kendaraan tersebut melanggar traffic light.
2. Ekstraksi Video
Video input diekstrak untuk mendapatkan frame-frame dari video tersebut.
3. Memperoleh Frame Hasil Rata-Rata Frame Video Frame hasil extraksi dipilih, kemudian diambil nilai rata-rata per pixel menggunakan persamaan TABI. Frame yang dipilih dapat berupa semua frame ataupun frame tertentu berdasarkan selang yang diinginkan.
4. Menentukan nilai threshold, erotion dan dilation pada proses segmentasi agar didapatkan bentuk objek yang baik untuk proses deteksi dari objek tersebut.
III. PENGUJIAN
Pengujian dilakukan dengan menggunakan sumber dari video pada waktu siang, sore dan malam hari. Pengujian membandingkan kemampuan sistem dalam mendeteksi pelanggaran yang dilakukan oleh roda dua dan roda empat. A. Pengujian Menggunakan Video pada Waktu Siang Hari
Dalam hasil pengujian pada video pada waktu siang hari, banyaknya kendaraan roda dua dan roda empat yang melanggar traffic light dihitung secara manual dibandingkan jumlah video yang disimpan oleh sistem, kemudian dicari tingkat keberhasilan dan error dari program. Tingkat keberhasilan dicari dengan cara membandingkan jumlah video yang tersimpan dengan jumlah kendaraan yang sebenarnya dikali 100%. Tabel 1 dan Tabel 2 menunjukkan hasil percobaan pada siang hari.
Tabel 1. Hasil Deteksi Pelanggaran Traffic Light oleh Roda Empat Pada
Video Siang Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 12.00 60 17 16 94 60 6 6 100 60 22 23 95 60 9 9 100 60 12 13 92,3 60 13 14 92,8 60 11 13 84,6 60 9 10 90 60 16 15 93,75 60 13 11 84 60 16 15 93,75 60 6 9 66,7 60 7 8 87,5 60 11 10 91 60 12 10 83 60 8 8 100
Tabel 2. Hasil Deteksi Pelanggaran Traffic Light Oleh Roda Dua Pada Video
Siang Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 12.00 60 1 4 25 60 3 10 30 60 8 18 44 60 4 3 75 60 2 2 100 60 5 4 80 60 1 4 25 60 2 6 33,3 60 5 3 60 60 3 2 66,7 60 15 9 60 60 3 10 30 60 6 11 54,5 60 1 14 7
4
B. Pengujian Menggunakan Video pada Waktu Sore HariDalam hasil pengujian pada video pada waktu siang hari, banyaknya kendaraan roda dua dan roda empat yang melanggar traffic light dihitung secara manual dibandingkan jumlah video yang disimpan oleh sistem, kemudian dicari tingkat keberhasilan dan error dari program. Tingkat keberhasilan dicari dengan cara membandingkan jumlah video yang tersimpan dengan jumlah kendaraan yang sebenarnya dikali 100%. Tabel 3 dan Tabel 4 menunjukkan hasil percobaan pada sore hari.
Tabel 3. Hasil Deteksi Pelanggaran Traffic Light oleh Roda Empat Pada
Video Sore Hari
Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 15.30 100 3 12 25 100 0 3 0 100 2 8 25 100 0 12 0 100 0 11 0 100 0 2 0
Tabel 4. Hasil Deteksi Pelanggaran Traffic Light oleh Roda Dua Pada Video
Sore Hari Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 15.30 60 6 5 83,3 60 4 2 100 60 4 10 40 60 2 13 15 60 3 5 60
C. Pengujian Menggunakan Video pada Waktu Malam Hari Dalam hasil pengujian pada video pada waktu malam hari, banyaknya kendaraan roda dua dan roda empat yang melanggar traffic light dihitung secara manual dibandingkan jumlah video yang disimpan oleh sistem, kemudian dicari tingkat keberhasilan dan error dari program. Tingkat keberhasilan dicari dengan cara membandingkan jumlah video yang tersimpan dengan jumlah kendaraan yang sebenarnya dikali 100%. Tabel 5 dan Tabel 6 menunjukkan hasil pengujian pada malam hari.
Tabel 5. Hasil Deteksi Pelanggaran Traffic Light oleh Roda Empat Pada
Video Malam Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 20.00 60 5 7 71,4 60 3 4 75 60 8 10 80 60 3 6 50 60 7 9 77,8 60 7 9 77,8 60 1 4 25 60 2 3 66,6 60 2 2 100 60 1 2 50 60 1 7 14,28
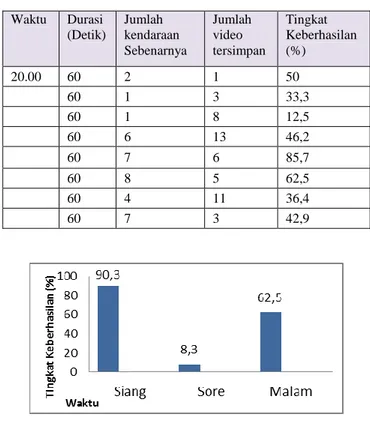
Tabel 6. Hasil Deteksi Pelanggaran Traffic Light oleh Roda DuaPada Video
Malam Waktu Durasi (Detik) Jumlah kendaraan Sebenarnya Jumlah video tersimpan Tingkat Keberhasilan (%) 20.00 60 2 1 50 60 1 3 33,3 60 1 8 12,5 60 6 13 46,2 60 7 6 85,7 60 8 5 62,5 60 4 11 36,4 60 7 3 42,9
Gambar 5. Grafik Pengaruh Waktu Pengambilan Sampel Data Terhadap
Tingkat Keberhasilan Deteksi Pelanggaran Traffic Light oleh Kendaraan Roda Empat
Gambar 6. Grafik Pengaruh Waktu Pengambilan Sampel Data Terhadap
Tingkat Keberhasilan Deteksi Pelanggaran Traffic Light oleh Kendaraan Roda Dua
5
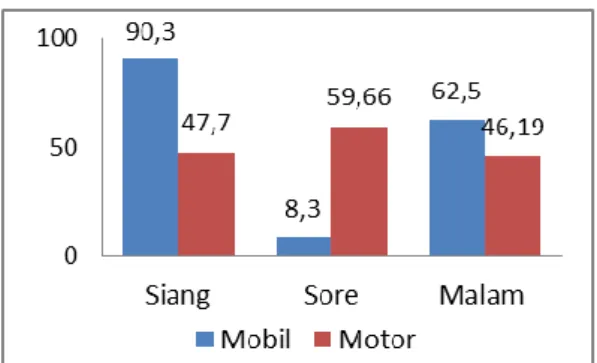
Gambar 7. Grafik Perbandingan Tingkat Keberhasialan Deteksi Roda Empat
Dengan Roda Dua
Gambar 8. Grafik Perbandingan Tingkat Kesalahan Deteksi Roda Empat
Dengan Roda Dua
IV. PENUTUP
A. Kesimpulan
Dari hasil pengujian dan analisa dapat disimpulkan : 1. Bayangan dari kendaraan mempengaruhi proses
deteksi oleh sistem. Semakin banyak bayangan yang muncul pada area ROI, maka kesalahan deteksi oleh sistem semakin besar.
2. Sistem cukup baik mendeteksi kendaraan yang berukuran besar seperti mobil, sedangkan pada deteksi kendaraan yang berukuran kecil seperti motor, sistem menghasilkan banyak kesalahan deteksi dikarenakan noise yang muncul dapat dianggap sebagai objek oleh sistem
3. Penelitian ini menghasilkan pendeteksian pelanggaran dengan tingkat keberhasilan rata-rata untuk mobil 90,3% dan 47,7% untuk motor pada video siang hari, 8,3% untuk mobil dan 59,66 % untuk motor pada video sore hari, dan 62,5% untuk mobil dan 46,19 % untuk motor pada video malam. Persentase kesalahan rata-rata dari sistem yaitu 11,36 % untuk mobil dan 64,5 % untuk motor pada video siang, 89,6 % untuk mobil dan 54,28 % untuk motor pada video sore, dan 37,7 % untuk mobil dan 65,7 untuk motor pada video malam.
B. Saran
1. Pada saat pengambilan video, harus diambil dari jarak ± 5 meter dari traffic light dengan ketinggian ± 4 meter dari tanah dan usahakan agar kamera tidak bergerak.
2. Perlu dikembangkan teknik shadow removal pada video untuk memisahkan objek dengan bayangannya terutama pada video saat pagi dan sore hari.
3.
Sebaiknya tidak mengimplementasikan sistem pada keadaan yang banyak noise, karena akan menyebabkan kesalahan deteksi semakin besar.4.
Pada saat melakukan inisialisasi harus dipilih jeniskendaraan mana yang menjadi prioritas deteksi, motor atau mobil. Karena dapat mempengaruhi ketepatan deteksi oleh sistem.
V. REFERENSI
[1] Musa S, Muhammad., “Modul Penghitung Kendaraan Menggunakan Background Substraction dengan Background Hasil Rekonstruksi”, Tugas Akhir Jurusan Teknik Elektro ITS, 2011
[2] Permana, Indra, “Pemantauan Kondisi Lalu Lintas Menggunakan Smart Visualisation System”, Tugas Akhir Jurusan Teknik Elektro ITS, 2009 [3] Undang-Undang Lalu Lintas No.22 Tahun 2009.
[4] Muhtadin., Alma’arif, Tommy., Gita, Dias Natawan.,”Background Recontruction Pada Intelligent Transportation System Kota Surabaya”, SITIA, 2009.
[5] Heidstra, Jelle., Goldenbeld, Charles., Makinen, Tapani., Nilsson, Goran., Sagberg, Fridulv.,”New Concepts in Automatic Enforcement”, Technical Research Centre of Finland (VTT), 2000
[6] Blackburn, R.R., Gilbert, D.T.,”Photographic Enforcement of Traffic Laws”, National Cooperative Highway Research Program, Synthesis of Highway Practice 219. Washington DC, National Academy Press, 1995 [7] Kedmi, S., Langer, D.,”Marom-Integrated Speed And Headway
Enforcement”, Traffic Technology International, 316-321,1996 [8] Rodriguez, M., Marzan, L. P.,”EVA: Camera-Based Vehicle Detection