AC Motorlarda Yol Verme Metodları
• Yol verme esnasında Elektriksel ve Mekanik gerilmelerin azaltılması
Bir AC motorun yol alma akımı nominal akımının 3 katından 7 katına kadar değişen bir değerde olabilir. Bunun sebebi tüm sistemin durma esnasındaki eylemsizlik momentini yenmek için büyük miktarda manyetik enerjinin gerekli olmasıdır. Şebekeden çekilen büyük akımlar gerilim düşümleri, yüksek geçici akımlar ve bazı durumlarda kontrolsuz olarak kesici açmaları gibi problemlere sebep olabilir. Yüksek yol alma akımları aynı zamanda motorun rotor çubuklarında ve sargılarda büyük mekanik gerilmelerine sebep olabilir, bunun yanında tahrik edilen ekipmana ve ekipmanın zemine bağlantı yerlerine zararlı etkileri de olabilir. Birkaç tane yol verme metodu vardır, hepsi de bu gerilmeleri azaltmayı amaçlar. En uygun yol verme metodunu yük, motor ve besleme şebekesi belirler. Yol verme ekipmanını ve herhangi bir koruma elemanını seçerken ve boyutlandırırken, aşağıdaki faktörler dikkate alınmalıdır:
• Yol alma esnasında şebekede oluşacak gerilim düşümleri • Yol alma sırasında gerekli yük momenti
• İstenen yol alma süresi • Doğrudan yol verme:
Doğrudan Yol verme kararlı şebekeler ve mekanik olarak iyi
boyutlandırılmış mil sistemleri için uygundur. En basit, en ucuz ve en yaygın yol verme metodudur. Çok sık olarak start/stop yapmayan küçük güçteki motorlara yol verme ekipmanı basit, elle kumanda edilen motor
koruma kesicisinden ibarettir. Daha büyük motorlar ve sıkça start/stop yapan motorlar veya birtakım kontrol sistemi içeren prosesler normal olarak kontaktör, termik röle gibi aşırı yük koruma içeren Doğrudan Yol Verici kullanırlar (bkz Şekil-1).
• Yıldız-Üçgen yol verme:
A.G. motorların çoğu 400V üçgen veya 690V Yıldız dönüşümüyle şebekeye bağlanır. Bu esneklik motorları daha düşük gerilimlerde kaldırmada da kullanılabilir. Yıldız/Üçgen bağlantı Doğrudan yolverme akımının yaklaşık 1/3’ü kadar akım çekerken aynı zamanda yol verme momentini de yaklaşık %25’e kadar düşürür. Motora önce yıldız olarak yol verilir, motor hızlandıktan sonra üçgen bağlantıya geçilir. Bu metod sadece şebekeye üçgen bağlanabilir sincap kafesli motorlarda
kullanılabilir (bkz şekil-2). • Reaktör ile yol verme
Demir nüveye sarılı bir bobin (yani şok bobini) (bkz şekil-3) yol alma esnasında motora seri bağlanarak yol alma akımı gerilimle orantılı olarak sınırlanır. Ancak bu aynı zamanda yol alma momentinde (karesel olarak) çok büyük miktarlarda azalmalara neden olacaktır. Diğer metodlarla kıyaslandığında bu metodun avantajı daha düşük maliyetli olmasıdır. • Ototrafo ile yol verme
Oto trafonun etkisi reaktör ile yol vermeye benzer. Burada gerilimi sınırlandırmak için oto trafo kullanmak yol alma akımını ve momentini azaltır. Fakat bu değerleri reaktör ile yol vermedekinden daha az düşürür. Diğer taraftan reaktör ile yol vermeden daha da pahalıdır (bkz şekil-4). • Kapasitör ile yol verme
Motoru mıknatıslamak için gerekli enerjiyi kapasitör gruplarında depolamak kaydı ile motoru şebekeye etki etmeksizin tüm yol alma momenti ile kaldırmak mümkündür. Aşırı kompanzasyondan kaçınmak için yol almadan sonra kapasite grupları devre dışı bırakılmalıdır.
Dezavantajı ise yüksek maliyeti ve kapasite grupları için geniş hacimlere ihtiyac olmasıdır (bkz şekil-5).
• Yumuşak yolvericiler
Yumuşak yol vericiler içinde bir güç ve kontrol devresi olan yarı iletken teknolojisine dayanır. Başlangıçta motor gerilimini düşürmek suretiyle motorun momenti düşürülür. Yol alma esnasında yolverici, gerilimi motorun yükü hızlandırmaya yetecek kadar artırarak motoru nominal hıza kadar ulaştırılır. Bu esnada herhangi bir moment veya akım sıçraması yapmaksızın yumuşak olarak sisteme yol verir. Yumuşak yolverici aynı zamanda prosesi yumuşak durdurmakta da kullanılabilir (bkz. Şekil-6). Yumuşak yol vericiler frekans konverterlerinden daha ucuzdur fakat ne yazık ki onlar gibi şebekeye bağlı diğer sistemlere rahatsızlık verecek harmonik akımları şebekeye gönderebilirler. • Frekans Konverteri ile yol verme
Frekans konverteri motoru sürekli beslemek üzere tasarlanmış olsalar da sadece yol verme için de kullanılabilirler.
Konverter sayesinde motor sıfır hızından nominal hızına kadar nominal akımında nominal
momentini verebildiği için motor konverter ile yol almada düşük akımlarla kalkabilir. Konverter fiyatları düşmesiyle, daha önce yumuşak yol vericilerin kullanıldığı uygulamalarda konverterler de yaygın bir şekilde kullanılmaya başlandı. Halen çoğu durumlarda konverter fiyatları yumuşak yolvericilerden pahalıdır ve şebekeye yumuşak yolvericiler gibi harmonik akımları verir (bkz şekil-7) • Dirençle yol verme
Dirençle yol verme yalnızca bilezikli motorlarda kullanılabilir. Bu tip motorlarda rotor devresi direnci dışardan bağlanan dirençle artırılabilir. Bu metod genellikle şebeke zayıf ve gerekli yol alma momenti ve
eylemsizlik momenti çok yüksek ise seçilir. Harici dirençler 4 ila 7
momenti elde edilebilir. Aynı zamanda normal Doğrudan Yol verme ekipmanları da stator devresine bağlanmalıdır. (bkz şekil-8).
AC Motor Yol Verici Cihazı Danfoss MCD 3000 Serisi � 7.5K-kW-800 kW
MCD 3000, şebeke üzerinden AC sincap kafesli motorlara yumuşak yol verme arzu edilen uygulamalarda elektronik, tam dalga kontrolü sağlar.
- 7.5 800 kW güç aralığı�
- Faz sırası kontrolü ile pompanın ters dönme koruması - Sürekli akım gözlemleme ile aşırı ve ani yüklere karşı koruma ...
AC Motor Kontrol Cihazı Danfoss VLT® AutomationDrive FC 300 Serisi 0.25kW-7.5 kW�
Yeni VLT® AutomationDrive FC 300 Serisi, sahip olduğu üstün teknoloji ile AC sürücü pazarında yeni bir tarz...
VLT® AutomationDrive, her hangi bir makine veya üretim hattındaki standart uygulamalardan servoya kadar tüm
uygulamaların kontrolünü sağlayan tek sürücü kavramını temsil eder. Gelişmiş özellikleri ile VLT® AutomationDrive, sürücü uygulamalarınızı bir çocuk oyunu gibi basitleştirir.
AC Motor Kontrol Cihazı Danfoss VLT® 2800 Serisi � 0.37kW-18.5 kW
VLT 2800 serisi, Kompakt sürücülerden oluşan ve düşük güçteki endüstriyel uygulamalar için tasarlanmıştır. Ekonomik, akıllı ve güvenilir... Bu cihaz, Danfoss Voltaj Vektör kontrolü (VVCPLUS) prensibine dayanarak çalışmaktadır.
Diğer VLT frekans konvertörlerinde olduğu gibi motor bölümü ile kontrol bölümü arasında galvanik izolasyon sağlanmıştır. Bu özellik, hem frekans konvertörünü işleten kullanıcılara, hem de bunun bağlandığı cihaza yüksek düzeyde güvenlik
sağlamaktadır. Çalıştırılması kolaydır... Bir VLT' yi kullanmanız, diğer bütün VLT serisini kullanabilmeniz anlamına gelmektedir. Uygulamalardan bağımsız yapısı ile işletmeniz için "TAK ve UNUT" rahatlığı...
AC Motor Kontrol Cihazı Danfoss VLT® 5000 Serisi � 0.75kW-400 kW
VLT 5000 serisi, yüksek performanslı frekans konvertörü olup, tüm opsiyonları ve standart özellikleri ile pazardaki en kaliteli ve "hatasız çalışan" AC sürücüler olarak bilinmektedir. VLT5000 serisi frekans konvertörleri, sanayi tesislerinde hız kontrolü için tasarlanmıştır. Yüksek esnekliğe sahip olmaları sayesinde kimya ve gıda sanayiinde izleme ve kontrol, otomobil sanayiinde
konveyör kayışlarının kontrolü, inşaat sanayiinde ise vinçler için en uygun ürünlerdir. DANFOSS, motor milini hareket ettirmeden otomatik olarak cihazın motora uyumunu sağlayan bir sistem geliştirmiştir.
Bu sistem, programlamayı daha da kolaylaştırmaktadır. VLT5000 serisi, bağlandığı motora kendisini otomatik olarak uyarlar.
VLT5000 standart bir frekans konvertörüne ek olarak tüm güvenlik elemanlarını içermektedir; RFI filtreler, her iki DC barada bulunan Harmonik bastırıcı şok bobinler, motor şok bobinleri...Bu koruma sistemleri ile şebekeden gelebilecek ve şebekeye intikal edebilecek dalgalanmalara karşı kesin çözüm getirdiği gibi, motor tarafında oluşabilecek arızalar için de üstün bir çözüm oluşturmaktadır.
VLT sistemlerinde motor ile VLT arasındaki kablo mesafesi 300 metre uzunluğa kadar çıkabilmektedir. VLT 5000 serisi ile
DANFOSS, teknolojinin sınırlarını zorlamakta; hız ve moment uygulamalarında lider olma konumunu böylece senelerdir değiştirmemektedir.
VLT 5000, değişmeyecek bir şey varsa o da kalitesi... AC Motor Kontrol Cihazı Danfoss VLT® 6000 Serisi � 1.1kW-400 kW
VLT 6000 HVAC,HVAC uygulamaları için üretilmiş vektör
olarak pompa ve fan uygulamalarında çalışmak üzere
tasarlanmış bir pazar öncüsü olan VLT 6000 serisi, tüm yönleri ile tam ve konusunda özelleşmiş bir üründür. Tüm işlevleri standart olup, bir mühendislik harikası olan tasarımı ile ölçüler en aza indirilmiştir.
Güvenli ve optimum çalışma için ilave herhangi bir modül veya karta ihtiyaç olmaması, pazardaki seçkinliğini ortaya
koymaktadır. PID kontrol, Otomatik Enerji Optimizasyonu,
Otomatik Anahtarlama Frekans Modülasyonu, Seri Haberleşme ve BMS sistemlerine bağlanabilme seçenekleri ile gerçek bir sürücüden bekleyebileceğinizden çok daha fazlasını sunuyor... AC Motor Kontrol Cihazı Danfoss VLT® 8000 AQUA Serisi
4kW-400 kW �
Danfoss, VLT 5 serisinin ilk olarak 1968'de üretmeye başladı. İlk uygulamalardan bazıları Su Terfi İstasyonlarındaki pompalardı. Danfoss o zamandan bu yana sektörde sayısız ürün ve
uygulama deneyiminin sahibi oldu.
DM (Değişken Momentli) bir sürücünün tüm özelliklerine ilave olarak SM (Sabit Moment) yetenekleri de gerektiren en yaygın uygulamalar düşünülmüştür. Su ve su arıtma uygulamalarında bulunan bir çok SM azaltılmış sürücülerin dışında VLT 8000 AQUA, etkileyici bir enerji tasarrufu kendiliğinden gerçekleşir. 3 adet önceden programlanmış DM motor uygulamalarına yönelik sabit moment modunun bulunması, projedeki sürücülerin
tamamının aynı seriden seçilebilmesini sağlar.
AC Motor Hız Kontrol Cihazları
SIEMENS Elektrotekniğin çok çeşitli alanlarında olduğu gibi AC Motor Hız Kontrolü konusunda da yılların kazandırmış olduğu yüksek deneyimi ile AC Motor Hız Kontrolü konusunda yepyeni bir boyut açacak, yüksek mühendislik ürünlerini, 4. Nesil AC Motor Hız Kontrol Cihazlarını sektöre sundu.
Bu ürünler MM410 - kompakt tip, MM420 - standart seri ve MM440 - vektör performansı olmak üzere 3 ana grupta toplanmaktadır. Tüm cihazlarda BICO programlama tekniğine sahiptir. BICO kelimesi, yazılımsal bağlantılar anlamında olup cihaz içindeki tüm bilgilerin, giriş/çıkışların yönlendirilmesine, farklı yerlere bağlanmasına ve
istenildiği kadar çok yerde kullanılmasına olanak sağlar. Bu programlama yapısı ve üstün performansı sayesinde, 4. nesil Siemens standart
[MK1]motor [MK2]hız kontrol cihazları MICROMASTER'lar, standart uygulamaların dışında birçok özel uygulamayı da başarıyla ve uygun maliyetle çözmektedirler. Micromaster 440 - vektör'ün günümüz motor hız kontrol cihazlarına göre en önemli üstünlüğü kontrol işaretlerine olan cevap hızı ve dinamik frenleme modülünün tüm güçlerde %100 çalışacak şekilde standart olarak cihaz içinde sunulmasıdır. Bu yüksek avantajı sayesinde özellikle pozisyonlamanın önem kazandığı uygulamalarda fiyat / performans açısından en elverişli çözümleri sunacaktır. Şimdiye kadar sadece özel amaçlı - dolayısıyla yüksek maliyetli - cihazlar ile tasarlanan sistemler artık piyasada stoklu olarak bulunan
MICROMASTER hız kontrol üniteleri ile başarılacaktır. MICROMASTER 410
-Kompakt tip
o Güç aralığı: 0,12kW - 0,75kW
o Besleme gerilimi: 1/3 faz 200-240Vac
o Son derece kompakt yapısı sayesinde panoda minimum yer sarfı o Analog çıkışa ihtiyaç duyulmadığı durumlarda, tüm Micromaster 420 fonksiyonları, programlama imkanları korunmuştur.
o Doğal soğutma / fansız tasarım MICROMASTER 420
-Standart seri
o Güç aralığı: 0,12kW - 11kW o Besleme gerilimi: 1/3 faz 200V -240Vac, 3 faz 380V - 480Vac o V/f ve FCC Motor kontrol
o PI Kontrol ile kapalı çevrim proses kontrolü
o Giriş/Çıkışlar: 3 + 1 dijital giriş, 1 analog giriş, 1 analog çıkış, 1 (dijital) röle çıkışı
o 60s. % 150 aşırı yüklenebilme yeteneği o BICO teknolojisi
MICROMASTER 440 - Vektör performansı
o Pompa, fan, bant yükleri gibi standart ve nispeten basit uygulamaların yanısıra;
- Dahili dinamik frenleme modülü sayesinde Vinç, Asansör uygulamalarının
- V/f tekstil kontrolü sayesinde tekstil uygulamalarının
- ECO (enerji kontrol optimizasyonu) algoritması sayesinde enerji tasarrufunu hedefleyen uygulamalarının
- Moment kontrolü sayesinde açma/sarma/çekme, ambalajlama uygulamalarının
- 3 farklı parametre seti sayesinde local/uzaktan kumanda gibi çalışma modu değişimi gerektiren uygulamaların
- Komutlara hızlı cevap süresi sayesinde konveyör/bant gibi pozisyonlama uygulamalarının
başarı ile gerçeklenmesi. o Güç aralığı: 0,12kW - 90kW
o Besleme gerilimi: 1/3 faz 200-240Vac, 3 faz 380-480Vac, 3 faz 500-600Vac
o 3s % 200, 60s %150 aşırı yüklenebilme yeteneği
o Vektör Kontrol Teknolojisi ile yük değişimlerinden bağımsız hassas ve dinamik hız kontrolü
o Uygulama boyutlarına ve ihtiyaca göre parametre filtreleme, gizleme, şifreleme seçenekleri. . Üst düzey PID fonksiyonu sayesinde kapalı çevrim proses kontrolü. PID parametrelerinin otomatik ayarlanması (auto-tuning)
EKS Elektronik Kontrol Sistemleri olarak ürünümüz olan OPTI DRİVE AC motor kontrol cihazımızı seçtiğiniz için sizleri kutlarız. Doğru olarak
montajı yapılıp çalıştırıldığında ve bakımı yapıldığında ürünümüz size uzun yıllar hizmet verecektir. Sürücümüzü kullanacak, montajını ve bakımını yapacak kişilerin bu kullanma kılavuzunu iyice okumaları ve anlamaları son derece faydalıdır.
Bu kılavuzda OPTI DRIVE AC motor kontrol cihazının montajı,
çalıştırıması ve bakımı ile ilgili bilgilere geniş olarak yer verilmişir. Eğer daha fazla teknik bilgiye ihtiyacınız var ise veya sürücüyü alışılmışın dışında şartlarda çalıştırmak istiyorsanız teknik servisimizi yada yerel irtibat ofisimizi aramakta gecikmeyin.
1.1 Genel Özellikler
OptiDrive-TNVx serisi invertörler genel amaçlı, yüksek performanslı sürücülerdir. Yapısında RISC-tabanlı mikrokontrolör ve akıllı güç modülü (IPM) bulunduran bu sürücülerde, yüksek verimli Darbe Genişlik
Modülasyonu (PWM) kullanılır. Çıkışta elde edilen sinüs dalga şekli ile her türlü standart asenkron motorun değişken hız kontrolü sağlanır. 2.1 Çevresel Şartlar
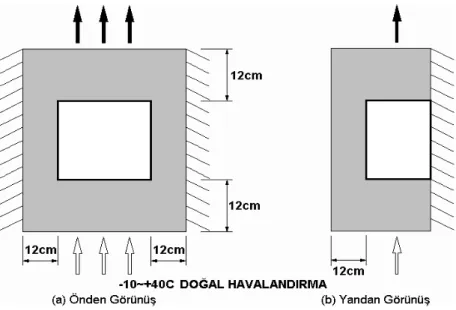
OptiDrive sürücünün kurulacağı yere, doğru yerleştirilmesi ve uygun çevresel şartların sağlanması; çalışma ömrü ve yüksek verimli işletim açısıdından önemlidir. Sürücünün kurulacağı ortam için en az aşağıdaki şartlar sağlanmış olmalıdır.
Ortam sıcaklığı: -10 ila +40° C (14 ila 104° F) arasında olmalı.
Yağmur,çamur ve nemden korunmuş olmalı. Doğrudan güneş ışığından korunmuş olmalı.
Metalik parçalar ve aşındırıcı gazlardan korunmalı. Sürekli titreşimlerden korunmalı. (0.5G’nun altında ) 2.2 Yerleştirme
OptiDrive’ın etrafında soğutma ve bakım açısından yeterli boş alan bırakılmalıdır. Montaj sırasında Şekil 2.1.’deki plana uyulması, ileride
problemlerle karşılaşılmaması açısından önemlidir. Doğal havalandırma etkisini kesmemek için soğutma kanalları düşey olacak şekilde monte edilir.
Şekil 2.1 OptiDrive’ın Çevresi ve Yerleşimi 2.3 Montaj Boyutları
Şekil 2.3 OptiDrive Montaj Boyutları
MODEL Genişlik Yükseklik Derinlik
TNV1-1 135mm 166.5mm 135mm
TNV1-2 135mm 166.5mm 135mm
TNV1-3 135mm 197mm 135mm
TNV3-4 135mm 266.5mm 135mm
TNV3-5 135mm 266.5mm 135mm
Tablo 2.1 OptiDrive Boyutları 2.4 Özellikler TNVx Serisi TNV1-1 TNV1-2 TNV1-3 TNV3-4 TNV3-5 Motor Gücü (kW) 0.75 1.5 2.2 3 4 Motor Gücü (Hp) 1 2 3 4 5.5 Anma Akımı (A) 3.5 7 10.5 8 10
Çıkış Gücü (kVA) 1.5 3 4 6 7.5 Giriş Gerilimi 1Æ , 220Vac +%15 -%20, 50/60Hz 3Æ , 380Vac +%15 -%20, 50/60Hz Çıkış Gerilimi 3Æ , 220Vac 3Æ , 380Vac
Kontrol Türü Sinusoidal Dalga PWM Kontrol
Taşıyıcı Frekans 3kHz, 6kHz
Frekans Aralığı 120Hz,480Hz
Frekans Alt Limiti 0.5-120Hz, 2-480Hz
Frekans Üst Limiti 0.5-120Hz, 2-480Hz
Doğruluk 25° C ve max. Frekans’ta +/-%0.5
Hız Hassasiyeti %0.1 (0.5-120Hz’de 0.12Hz, 2-480Hz’de 0.48Hz)
Hızlanma/Yavaşlama Zamanı
0.5-125.0 saniye
Kısa Süreli Çalışma 0.5-30Hz, 2-120Hz
Çalışma Türü Dahili, Harici (Fwd/Stop, Rev/Stop or Run/Stop,
Fwd,Rev)
V/F Eğrileri 10 Eğri
DC Fren. Frekansı 0 Hz
DC Fren. Süresi 0.1-10.0 saniye
Durma Şekli Serbest Durma / Frenle Durma
Gösterge Durum LED’leri, 4 Hane, 7 Segment
Koruma Aşırı Akım, Aşırı Gerilim, Düşük Gerilim, Aşırı Sıcaklık,
Kısadevre ve Topraklama Hatası
Aşırı Yüklenme %150, 30 saniye
Akım Koruma %200 (Tam Kapanma)
Nem 0 ila %95 (Yoğuşmayan)
Titreşim 0.5 G
Çevresel Şartlar Toz ve Aşındırıcı Gazlardan Arındırılmış Ortam
Bölüm 3 Kablolama
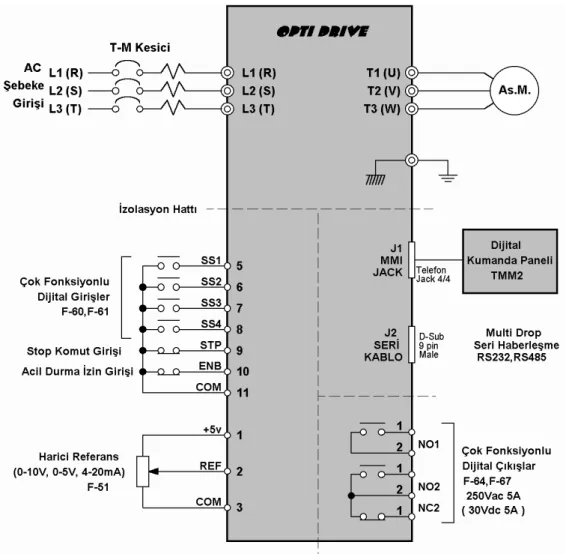
Şekil 3.1 OptiDrive Ara Bağlantıları 3.2 Kablo Boyutu & Devre Kesici ( Sigorta ) Seçimi 3.2.1 Devre Kesici ( Sigorta ) Seçimi
Cihazın güvenliğini sağlamak için, şebeke faz(lar)ı ile OptiDrive arasında devre koruma elemanları ve devre kesici sigortaların kullanılması
önemlidir. Şebeke ile OptiDrive arasında kullanalacak koruma elemanı termik-magnetik kesici (TMK) olabilir.
Güvenlik nedeniyle aşağıdaki talimatları lütfen uygulayın: KESİNLİKLE
OptiDrive çıkış (U,V,W) uçlarına şebeke bağlantısı yapmayın, aksi halde cihazda onarılması mümkün olmayan arızalar meydana gelir. KESİNLİKLE OptiDrive çıkış ucu ile motor arasında magnetik
kontaktör (MK) kullanmayın. Enerji kesilmesi halinde magnetik kontaktörün oluşturacağı geçici parazitler cihaza zarar verebilir.
Tablo 3.1’de tüm sürücüler için önerilen termik-magnetik kesici ve MK değerleri belirlenmiştir. MODEL TNV1-1 TNV1-2 TNV1-3 TNV3-4 TNV3-5 T-M Kesici
15A 20A 20A 12A 15A
M
Kontaktör
16A 16A 16A 13A 16
Tablo 3.1 T-M Kesici & M Kontaktör Seçimi 3.2.2 Kablo Boyutu
Cihazın güç katındaki (K1) bağlantılarda kullanlacak kablolar Tablo 3.2’de belirlenen kesitlerde olmalıdır.
Terminal TNV1-1,2 TNV1-3 TNV3-4,5 L, N, L1, L2, L3 2.0mm² 3.5 mm² 2.0mm² P, B 2.0mm² 3.5 mm² 2.0mm² U, V, W 2.0mm² 3.5 mm² 2.0mm² Vida Boyutu M4 M4 M5
Tablo 3.2 Güç Kabloları & Seçimi 3.3 Topraklama
Kablo kesiti en az 2mm2 olmalıdır. Kablo boyu mümkün olduğunca kısa tutulmalıdır.
Topraklama direnci 100W ’dan düşük olmalıdır.
OptiDrive sürücü, KESİNLİKLE kaynak makinesi gibi büyük akım çeken makinelerle birlikte kullanılmamalıdır.
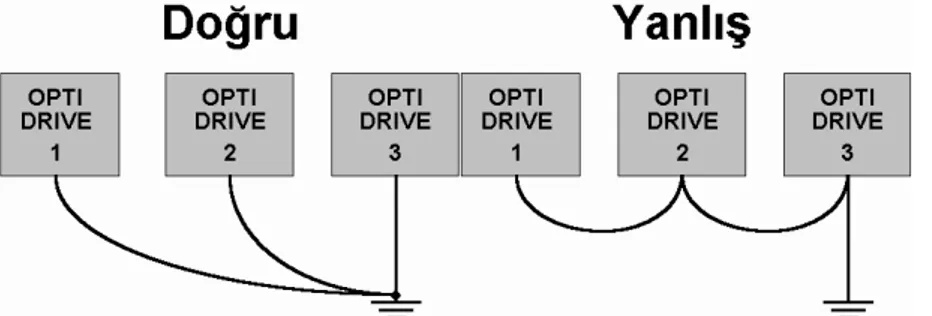
Birçok OptiDrive sürücünün birarada kullanıldığı durumlarda, her cihaz için ayrı bir topraklama hattı bulunmalıdır. Doğru topraklama bağlantısı için Şekil 3.2’de gösterilen talimatlara uyulmalıdır.
Şekil 3.2 Birden Fazla OptiDrive’ın Topraklanması 3.4 Motor Aşırı Yük Termik Koruması
Motoru aşırı ısınmaya karşı korumak için OptiDrive çıkış uçları (T1,T2,T3)
ile motor arasında bir termik röle kullanılabilir.( Bak Şekil 3.1 )
Motor sargılarında bir termistör bulunduğu durumlarda, termik röle kullanılması gerekli değildir. Fan soğutmalı motor, anma akımında ve düşük hızda çalıştırılması durumunda aşırı ısınacaktır. Bu
durumda fan soğutmalı motorlarda termistör kullanımı tavsiye edilir. Termistörler klasik termik röleye göre daha etkin bir koruma sağlar. Termik aşırı yük koruması, motorun tam yükte çalışma durumuna
göre ayarlanabilir.
Birden fazla motorun tek bir OptiDrive’dan sürülmesi durumunda her bir motor ile cihaz arasına termik aşırı yük koruması
kullanılmalıdır.
3.5 Frenli Motor Magnetik Kontaktörü
OptiDrive motora değişken bir gerilim uygular. Bu nedenle OptiDrive bir frenli motor ile kullanılırken, magnetik frenin enerjisi doğrudan
şebekeden alınmalıdır. KESİNLİKLE OptiDrive çıkışından sürülmemelidir.
AC şebeke ile motor freni sağlamak için; magnetik fren, OptiDrive’ın dijital çıkışından referans alan bir magnetik kontaktör ile
enerjilendirilmelidir.
Fren bobininin enerjisiz kalması ile oluşabilecek geçici darbe akımlarına karşı fren bobinine acilen bir darbe söndürücü bağlanmalıdır.
AC fren bobinleri için R-C filtre (söndürücü)
DC fren bobinleri için Diyod türü söndürücü devreleri kullanılabilir. 3.6 Kablolama İle İlgili Uyarılar
KESİNLİKLE
OptiDrive çıkış uçları (U,V,W)’na AC şebeke bağlantısı yapmayın. KESİNLİKLE OptiDrive çıkış uçları (U,V,W) ile motor arasında
magnetik kontaktör (MK) kullanmayın. Motorun çalışması
sırasında, MK türünde bir birimin devreye girip çıkması, OptiDrive’a zarar verebilecek büyük geçici akımlara neden olacaktır.
KESİNLİKLE OptiDrive çıkış uçları (U,V,W) ile motor arasında güç kompanzasyon kondansatörleri kullanmayın.
KESİNLİKLE, OptiDrive devrede iken motor uçlarında ölçü aleti ( gerilim uygulayacak türde ) kullanmayın. Aksi halde yarıiletken güç elemanları geçici yüksek gerilimden zarar görecektir.
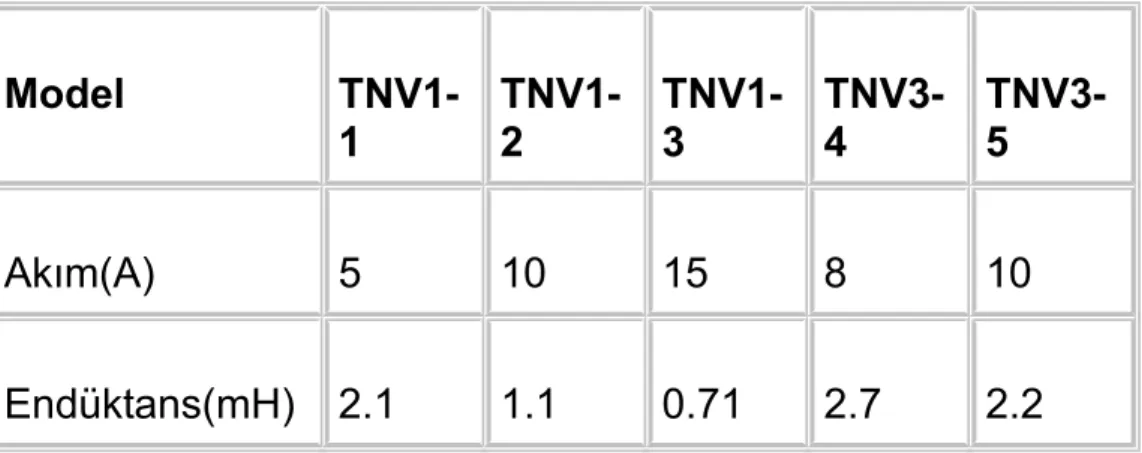
Doğrultucu hatasının oluşmaması için Şebeke Gücü (kVA) 500kVA’den düşük olmalıdır. Şebeke gücünün bu sınırı aşması durumunda, uygun değerli bir reaktör bobini kullanılmalıdır.(Bak. Tablo 3.3) Birden fazla OptiDrive’ın kullanılması halinde, her cihaz için ayrı reaktör bobini gerekli değildir. Toplam akım değerini
sağlayan bir reaktör bobini kullanılması uygun olacaktır.
Model TNV1-1 TNV1-2 TNV1-3 TNV3-4 TNV3-5 Akım(A) 5 10 15 8 10 Endüktans(mH) 2.1 1.1 0.71 2.7 2.2
Tablo 3.3 Reaktör Bobin Değerleri
Bölüm 4 Harici Kumanda Fonksiyonları
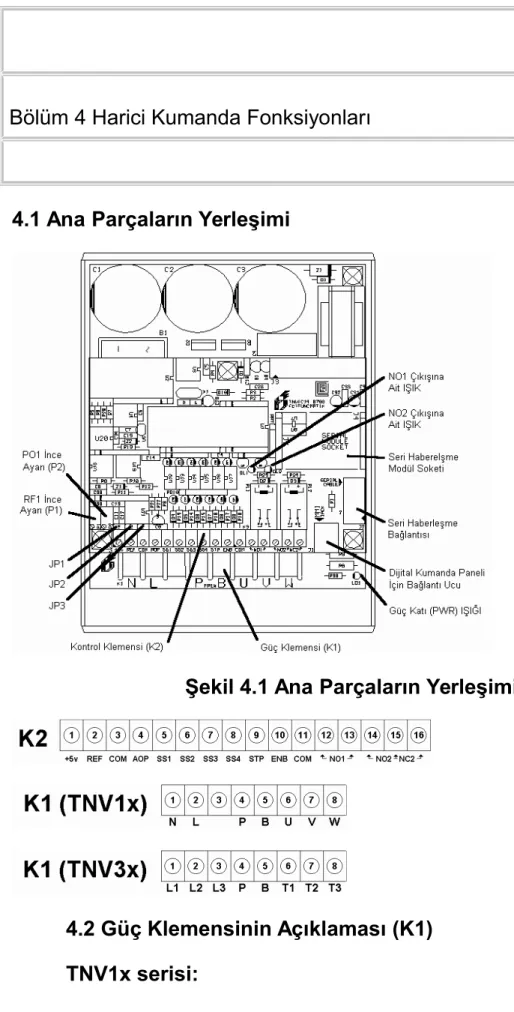
4.1 Ana Parçaların Yerleşimi
Şekil 4.1 Ana Parçaların Yerleşimi
4.2 Güç Klemensinin Açıklaması (K1) TNV1x serisi:
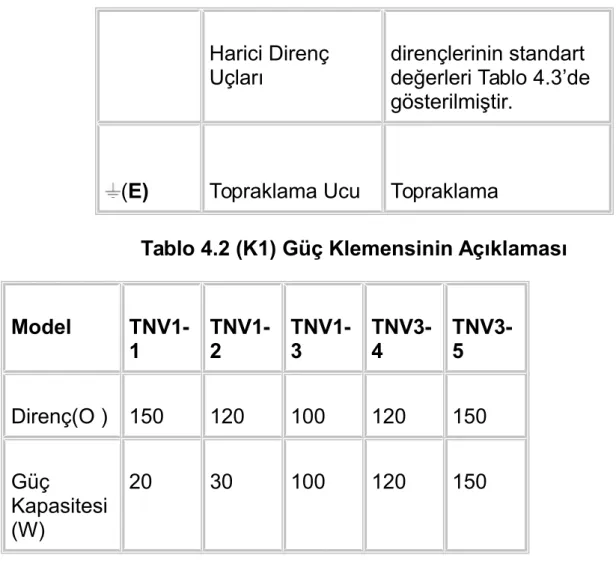
Bağlantı Bağlantı İsmi Açıklama L, N Faz-Nötr Şebeke Girişleri 1Æ , 180-250Vac , 50/60Hz T1(U), T2(V), T3(W) Çıkış Uçları 3Æ , 220Vac P,B Frenleme İçin Harici Direnç Uçları OptiDrive frenleme dirençlerinin standart değerleri Tablo 4.3’de gösterilmiştir.
(E) Topraklama Ucu Topraklama TNV3x Serisi:
Bağlantı Bağlantı İsmi Açıklama L1(R), L2(S), L3(T) AC Şebeke Faz Girişleri 3Æ , 300-440Vac , 50/60Hz T1(U), T2(V), T3(W) Çıkış Uçları 3Æ , 380 Vac
Harici Direnç Uçları
dirençlerinin standart değerleri Tablo 4.3’de gösterilmiştir.
(E) Topraklama Ucu Topraklama
Tablo 4.2 (K1) Güç Klemensinin Açıklaması
Model TNV1-1 TNV1-2 TNV1-3 TNV3-4 TNV3-5 Direnç(O ) 150 120 100 120 150 Güç Kapasitesi (W) 20 30 100 120 150
Tablo 4.3 Fren Direnç Değerleri 4.3 Kontrol Klemensinin Açıklaması (K2)
4.3.1 Bağlantı 1 “+5v” İşlev: Referans çıkış gerilimi
Bu bağlantı ucu, sadece dışarıdan bağlanan analog potansiyometre için bir referans değerdir ve 10mA değerinde bir DC akım kaynağıdır.
4.3.2Bağlantı 2 “REF”
İşlev: Harici analog referans girişi
OptiDrive bu bağlantı ucu ile kullanıcıya, hız veya hızlanma/yavaşlama süresi için harici referans girişi sağlar. Bu bağlantı noktasına gelen harici bir sinyal (yada potansiyometre) ile; fonksiyon listesinden seçilebilen hız, hızlanma/yavaşlama süresi, kısa süreli çalışma hızı, alternatif hız
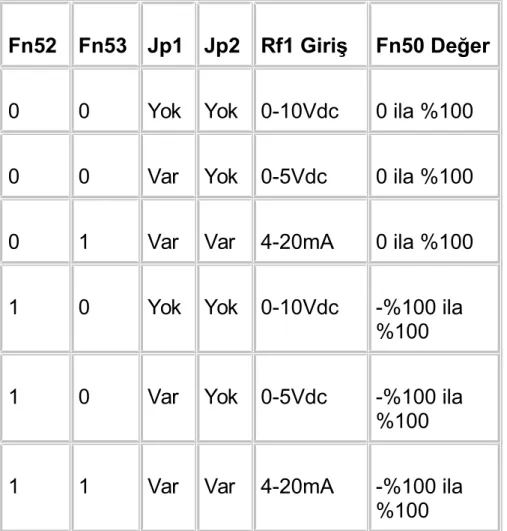
referans giriş seçimi ) Ayrıca seçilecek fonksiyonlar ve jumperler yardımıyla bu analog referans girişi 0-10Vdc, 0-5Vdc, 4-20mA
modlarından birinde çalıştırılabilir. Ayrıntılar için Tablo 4.4’ü inceleyiniz. Bu girişin aktifleştirilmesi için sırasıyla, harici referans seçimi (Fn51>0) yapılmalı ve referans güncelleştirme fonksiyonu (Fn34=1)
etkinleştirilmelidir. Daha sonra harici referans seçiminin değiştirilmesi durumunda, referans güncelleştirme izni kapanır (Fn34=0 ). Bundan dolayı işlem sırasına önem verilmelidir.
Fn52 Fn53 Jp1 Jp2 Rf1 Giriş Fn50 Değer 0 0 Yok Yok 0-10Vdc 0 ila %100 0 0 Var Yok 0-5Vdc 0 ila %100 0 1 Var Var 4-20mA 0 ila %100 1 0 Yok Yok 0-10Vdc -%100 ila
%100 1 0 Var Yok 0-5Vdc -%100 ila
%100 1 1 Var Var 4-20mA -%100 ila
%100
Tablo 4.4 Analog Giriş Aralığının Seçimi 4.3.3 Bağlantı 3/11 “COM”
İşlev: Kontrol devresinin ortak ucu (K2 klemensinin 1,2,4-10 terminalleri için)
Bu bağlantı noktası OptiDrive’ın tüm kumanda giriş uçları ve referansları için ortaktır.
Bu uca yapılan bağlantılarda dikkatli olmak gerekir. Bu uç, güç devresinden ( güç uçları ve toprağı ) elektriksel olarak yalıtılmıştır. 4.3.4 Bağlantı 4 “AOP”
İşlev: Kullanıcı tarafından seçilebilir çok fonksiyonlu analog çıkış OptiDrive, kullanıcıya PO1 analog çıkışı vasıtası ile; hız, akım, motor besleme gerilimi, harici analog giriş değeri ve benzeri bilgileri 0-10Vdc yada 0-5Vdc cinsinden verir.(Bakınız 5.7.4-Analog çıkış seçim tablosu ) Bu analog çıkışın bildireceği değer Fn56 yardımıyla seçilebilir ve çıkış değerinin yüzdesi Fn55 yardımıyla okunabilir. ( Lütfen ayrıntılar için Tablo 4.5’i kullanınız. )
İki yönlü ( sıfır merkezli ) değerler Fn57=1 ayarı ile görüntülenebilir.
Fn57 Jp3 Fn55 Değeri PO1 Çıkışı 0 Yok 0 ila %100 0-5Vdc 0 Var 0 ila %100 0-10Vdc 1 Yok -%100 ila %100 0-5Vdc 1 Var -%100 ila %100 0-10Vdc
Tablo 4.5 Analog Çıkış Aralığının Seçimi 4.3.5 Bağlantı 5/6 & 7/8 “SS1/SS2” & “SS3/SS4”
İşlev: Harici kumanda ve referans için seçime bağlı dijital girişler Dijital girişler iki çifte ayrılır ve bu çiftler Fn60&Fn61 yardımıyla bağımsızca seçilerek kullanılırlar.
OptiDrive birçok değişik çalışma türü sağlar. Bu özellik sayesinde değişik uygulama ihtiyaçları için dahili ( kontrol paneli ) veya harici kontrol
yöntemleri kullanılabilir. Ayrıca harici kontrol durumlarında OptiDrive, hız ve ivme kontrolleri için referans seçimi, alternatif hız referanslı kontroller,
moto-pot simülasyonu…vb özellikleri dışarıdan kabul eder. ( Lütfen ayrıntılar için Bölüm 5.7’ı inceleyiniz.)
Harici işletim komutları [run(başla), jog(kısa süreli çalışma),...] Fn62=1 ayarı ile etkinleştirilir. Ayrıca harici referans seçimi [alternatif hızlanma, ters yöndeki hız,…] Fn63=1 ayarı ile etkinleştirilir. ( Ayrıntılar için Bölüm 5.5’ı inceleyiniz.)
Ayarlama hatası olduğu taktirde ( Fn60=Fn61 veya aynı işlevli seçimler ) sürücü bir hata verir ve E-04 hatası görüntülenir.
Dijital girişler serbest kontak veya butonlar ile kolayca sürülür, “COM” ortak ucu analog giriş/çıkış’lar ile paylaşılır.
4.3.6 Bağlantı 9 “STP”
İşlev: Harici STOP (DUR) komutu için dijital giriş
Bu dijital giriş, dijital bir durdurma anahtarı olarak kullanılır. ( Hata
koşullarını sıfırlar, sürücüyü durdurur.) Motoru durdurmak için iki yöntem vardır. Fn31 fonksiyonu ile bu yöntemlerden biri seçilir. Bu yöntemler, serbest durma ve frenleme ile ( yavaşlama eğrisine göre ) durma yöntemleridir.
Bu girişin iptal edilmesi mümkün değildir, kullanılmaması durumunda bir jumper yardımıyla doğrudan “COM” ucuna bağlanır.
4.3.7 Bağlantı 10 “ENB”
İşlev: Harici ENB (İZİN) komutu için dijital giriş (Çalıştırma izni) Bu dijital giriş acil durum koşulları için gereklidir. CPU ( Merkezi İşlemci )’yi görmeksizin doğrudan güç devresine etkir. Bu ucun açık bırakılması durumunda çıkışlar kesilir ve E-01 hatası görüntülenir.
Bu girişin iptal edilmesi mümkün değildir, kullanılmaması durumunda bir jumper yardımıyla doğrudan “COM” ucuna bağlanır.
4.3.8 Bağlantı 12/13 “NO1”
İşlev: Seçime bağlı 1 nolu dijital çıkış rölesi, normalde açık kontağını kapatır.
Bu dijital çıkış 250Vac-1A değerlerinde bir yükü besliyebilme durumundadır.
Bu dijital çıkışın işletimi, Fn64 fonksiyonu yardımıyla seçilir. Röle
kontaklarının, kapanmadan önceki gecikme süresi ve açılmadan önceki bekleme süresi, sırasıyla Fn65 ve Fn66 fonksiyonları ile seçilir.
4.3.9 Bağlantı 14/15/16 “NO2/NC2”
İşlev: Seçime bağlı 2 nolu dijital çıkış rölesi, normalde açık kontağını kapatır.
Bu dijital çıkış 250Vac-1A değerlerinde bir yükü besliyebilme durumundadır.
Bu dijital çıkışın işletimi, Fn67 fonksiyonu yardımıyla seçilir. Röle
kontaklarının, kapanmadan önceki gecikme süresi ve açılmadan önceki bekleme süresi, sırasıyla Fn68 ve Fn69 fonksiyonları ile seçilir.
Bölüm 5 Dijital Kontrol Paneli
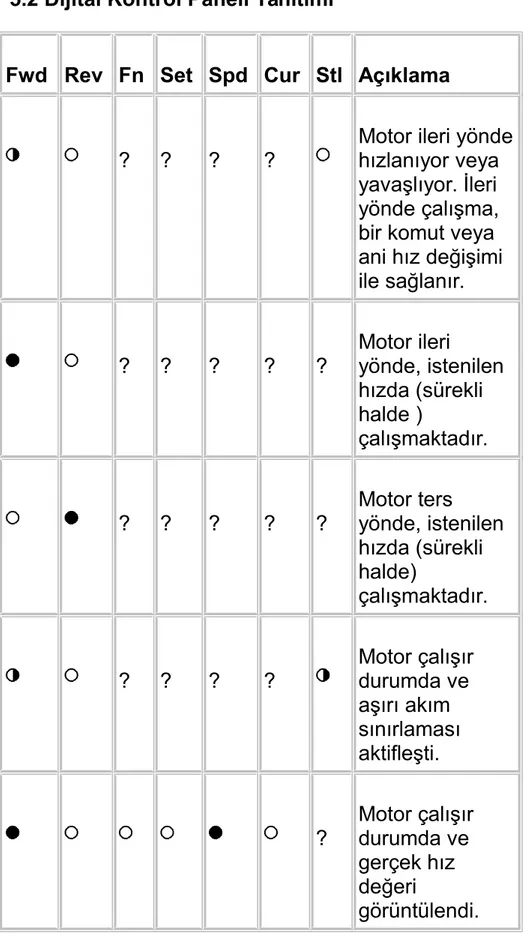
Şekil 5.1 Dijital Kontrol Panelinin Açıklaması 5.2 Dijital Kontrol Paneli Tanıtımı
Fwd Rev Fn Set Spd Cur Stl Açıklama
? ? ? ?
Motor ileri yönde hızlanıyor veya yavaşlıyor. İleri yönde çalışma, bir komut veya ani hız değişimi ile sağlanır. ? ? ? ? ? Motor ileri yönde, istenilen hızda (sürekli halde ) çalışmaktadır. ? ? ? ? ? Motor ters yönde, istenilen hızda (sürekli halde) çalışmaktadır. ? ? ? ? Motor çalışır durumda ve aşırı akım sınırlaması aktifleşti. ? Motor çalışır durumda ve gerçek hız değeri görüntülendi.
? Motor çalışır durumda ve gerçek akım değeri görüntülendi. ? Motor çalışır durumda ve hız referans değeri görüntülendi. ? ? Fonksiyon seçim durumu, fonksiyon numarası görüntülendi. ? ? Fonksiyon ayar durumu; fonksiyon numarası görüntülendi.
:Işık yanıyor, :Işık sönük, :Işık yanıp sönüyor, ?:Etkisiz Tablo 5.1 Dijital Kumanda Panel Işıklarının Tanıtımı
3. Fonksiyon Seçimi ve Ayarları
Örnek: Kısa süreli çalışma hız sınırının (Fn10) 2.5’tan 5.0’a ayarlanması
1 Fn tuşuna basarak fonksiyon konumuna geçin. Dijital göstergede “Func” görüntülenir ve Fn ışığı yanar. 2 Ok işaretli arttırma/azaltma tuşlarını kullanılarak istenilen fonksiyon numarası seçilir. 3 Dijital göstergede daha önceden ayarlanmış veya hafızadaki değer gözlenir, SET ışığı yanar. 4 Ok işaretli arttırma/azaltma tuşları kullanılarak istenilen fonksiyon değeri ayarlanır.
5 Fn tuşuna basılarak göstergedeki değer hafızaya kayedilir. 6 2-5 Adımları Tekrarla Farklı fonksiyon değerlerinin değiştirilmesi 7 Fonksiyon ayarlama işlemi son bulur. Parametre ayarlama işlemi başlar.
NOT: Fonksiyon değeri değiştirildikten sonra mutlaka Fn tuşuna basılarak ayarlanan değer hafızaya kayıt edilmelidir. Şayet istenilen değer ayarlandıktan sonra STP (Stop) tuşuna basılarak çıkılırsa, ayarlanan değer hafızaya kaydedilmemiş olur.
5.4 Gösterge Parametreleri Seçimi ve Ayarları
Adım Tuş Açıklama Gösterge 1 Fn tuşuna, istenilen gösterge parametre numarası göstergede görüntülenene kadar basın. 2 Gerçek parametre değeri göstergede görüntüleninceye kadar ½ saniye bekleyin. SET ve SPD ışıkları yanacaktır. 3 Görüntülenen parametre değerini ok tuşları yardımıyla değiştirin (Motor temel hız değerini 50’den 40’a değiştirin.)
4 Fn tuşuna diğer parametre numarasının görüntülenmesi için basın. 5 Gerçek parametre değeri göstergede görüntüleninceye kadar ½ saniye bekleyin. CUR ışığı yanacaktır.
6 Fn tuşuna tekrar basın. Dijital göstergede “Func” görüntülenir. Fn ışığı yanar. 7 1.Adımı Tekrarlayın Gösterge parametrelerinin ayarlama işlemi tekrarlanır.
NOT: Gösterge parametre değeri değiştirildikten sonra mutlaka Fn tuşuna basılarak, ayarlanan değer hafızaya kayıt edilmelidir. Şayet
istenilen değer ayarlandıktan sonra STP (Stop) tuşuna basılarak çıkılırsa, ayarlanan değer hafızaya kaydedilmemiş olur.
5. Fonksiyon Listesi Fn No Kısaltm a Açıklama Adı m
Aralık Birim o/d Kilit Fab.
0 SpdRef Temel Hız Referansı 0.1 Llm~Ulm %,Hz,rp m o/d 6.0 1 Kullanım Dışı
2 AccTim Hızlanma Süresi 0.5 0.5~125. 0
saniye o/d 5.0
3 DccTim Yavaşlama Süresi 0.5 0.5~125. 0
saniye o/d 5.0
4 AcrTim Ters Hızlanma Süresi /Alternatif
0.5 0.5~125. 0
saniye o/d * 5.0
5 DcrTim Ters Yavaşlama Süresi /Alternatif 0.5 0.5~125. 0 saniye o/d * 5.0 6 SpdRf1 Alternatif Hız Referansı #1 0.1 Llm~Ulm %,Hz,rp m o/d 0.0 7 SpdRf2 Alternatif Hız Referansı #2 0.1 Llm~Ulm %,Hz,rp m o/d 0.0 8 SpdRf3 Alternatif Hız Referansı #3 0.1 Llm~Ulm %,Hz,rp m o/d * 0.0
9 SpdRf4 Alternatif Hız
Referansı #4 / Ters
0.1 Llm~Ulm %,Hz,rp m
o/d * 0.0
10 JogRef Kısa Süreli Çal.Hız Referansı 0.1 0~25.0 %,Hz,rp m o/d * 0.0 11 SpdUlm Hız Üst Sınırı 0.1 0~ %100.0 %,Hz,rp m o/d * 60.0 12 SpdLlm Hız Alt Sınırı 0.1 0~Ulm %,Hz,rp m o/d * 0.0 13 Kullanım Dışı 14 Kullanım Dışı 15 Kullanım Dışı
16 UseAcc Hızlan. Süresi ile Eşit Yavaşla. Süresi
1 0,1 o/d * 0
17 RevSpd Ters Yönde Alternatif Hız Referansının Etkinleştirilmesi
1 0,1 o/d * 0
18 Kullanım Dışı
19 RevAcc Ters Yönde
Hızlanma/Yavaşla ma İzni 1 0,1 o/d * 0 20 SlpCmp Kayma Kompanzasyonu 0.1 0.0~10.0 % o/d * 0.0
( Histerezis) m
22 BrkLev DC Fren. Seviyesi 1 0~50 Vac o/d * 0 23 BrkTim DC Fren. Süresi 0.1 0.0~5.0 saniye o/d * 0.0 24 StaDis Hızlanmada Aşırı
Akım
Sınrlamasının İptal Edilmesi
1 0,1 o/d * 0
25 StsEnb Sürekli Hızda Aşırı Akım
Sınrlamasının Etkinleştirilmesi
1 0,1 o/d * 0
26 StdDis Yavaşlamada Aşırı Akım
Sınrlamasının İptal Edilmesi
1 0,1 o/d * 0
27 StaLev Hızlanmadaki Aşırı Akım Sınrlama Seviyesi
0.2 0.0~50.0 % o/d * 50.0
28 StsLev Sürekli Hızda Aşırı Akım Sınrlama Seviyesi 0.2 0.0~50.0 % o/d * 50.0 29 Kullanım Dışı 30 StpNzr Sıfır Yakınında Durma 1 0,1 o/d * 0
31 FreStp Serbest Durma 1 0,1 o/d * 0
32 BrkDir Yön
Değiştirildiğinde
Frenleme 33 BrkStp Durdurma
Sırasında Frenleme
1 0,1 o/d * 0
34 RefEnb · Analog Referans Girişinin
Güncelleştirilmesi
1 0,1 o/d * 0
35 DisRar · Enerji Kesilme Sonrası Çalışma İzninin İptal Edilmesi
1 0,1 o/d * 0
Fn
No Kısaltma Açıklama Adım Aralık Birim o/d Kilit Fab. 36 DisRev · Ters Yönde
Çalışma İzninin İptal Edilmesi
1 0,1 o/d * 0
37 FrkHig · Frekans Aralığı (0~ 120Hz/0~ 480Hz) 1 0,1 o/d * 0 38 CrnHig · Taşıyıcı Frekans (3Khz/6KHz) 1 0,1 o/d * 0
40 SpdVal Hız Değeri 0.1 0~100.0 %,Hz,rpm o
41 Kullanım Dışı
42 SpdMux Hız Mux Değeri 0.1 0~100.0 %,Hz,rpm o 43 RmpVal Rampa Üreteç
Değeri 0.1 0~100.0 %,Hz,rpm o 44 Kullanım Dışı 45 CurVal Çıkış Akım Değeri 0.1 0~200.0 %,Iac o 46 Kullanım Dışı
47 MotVol Motor Gerilimi 1 0~250 Vac o
48 BusVol DC Bara Gerilimi
2 0~500 Vdc o
49 Kullanım Dışı
50 Rf1Val Analog Giriş #1 Değeri
0.1 0.0~100.0 % o
51 Rf1Sel Analog Giriş #1 Giriş Seçimi 1 0~16 o/d * 0 52 Rf1Ctp Analog Giriş #1 Sıfır Merkezli 1 0,1 o/d * 0 53 Rf1Cmd Analog Giriş #1 Akım Konumunda 1 0,1 o/d * 0 54 Kullanım Dışı
55 Po1Val Analog Çıkış #1 Değeri 0.1 0.0~100.0 % o 56 Po1Sel Analog Çıkış #1 Seçimi 1 0~16 o/d * 0 57 Po1Ctp Analog Çıkış #1 Sıfır Merkezli 1 0,1 o/d * 0 58 Kullanım Dışı 59 Kullanım Dışı
60 Dg1Sel Dijital Giriş #1,#2 Seçimi
1 0~32 o/d * 0
61 Dg2Sel Dijital Giriş #3,#4 Seçimi 1 0~32 o/d * 0 62 DcmEnb Dijital Kumanda Komutlarının Etkinleştirilmesi 1 0,1 o/d * 0 63 DrfEnb Dijital Referansların Etkinleştirilmesi 1 0,1 o/d * 0 64 No1Sel Dijital Çıkış #1 Seçimi 1 0~32 o/d * 0 65 No1Bef Dijital Çıkış #1 Gecikme Öncesi 0.1 0.0~25.0 saniye o/d * 0.0 66 No1Aft Dijital Çıkış #1 Gecikme 0.1 0.0~25.0 saniye o/d * 0.0
Sonrası 67 No2Sel Dijital Çıkış #2 Seçimi 1 0~32 o/d * 0 68 No2Bef Dijital Çıkış #2 Gecikme Öncesi 0.1 0.0~25.0 saniye o/d * 0.0 69 No2Aft Dijital Çıkış #2 Gecikme Sonrası 0.1 0.0~25.0 saniye o/d * 0.0 70 DstCnt Mesafe (Birim) Sayıcı Değeri 1 -999~9999 Darbe o
71 DstOfs Mesafe (Birim) Sınır Ayarı 1 0~9999 Darbe o 72 Sonraki Kullanımlara Ayırılmıştır 73 Sonraki Kullanımlara Ayırılmıştır 74 Sonraki Kullanımlara Ayırılmıştır Fn
75 DstCmp · Mesafe (Birim) Karşılaştırıcı 1 0~9999 Darbe o/d * 0 76 DstHys · Mesafe (Birim) Bandı (Histerezis) 1 0~9999 Darbe o/d * 0 77 DstMul · Mesafe (Birim) Çarpanı 1 0~9999 Darbe o/d * 0 78 Sonraki Kullanımlara Ayırılmıştır 79 Sonraki Kullanımlara Ayırılmıştır 80 DspCnt Gösterge Parametre Sayısı 1 0~4 * 2 81 DspPr1 Gösterge Parametresi #1 1 0~79 * 40 82 DspPr2 Gösterge Parametresi #2 1 0~79 * 43 83 DspPr3 Gösterge Parametresi #3 1 0~79 * 0 84 DspPr4 Gösterge Parametresi 1 0~79 * 0
#4 85 Kullanım Dijitalışı 86 Kullanım Dijitalışı 87 DisMul Gösterge Çarpanlarının İptal Edilmesi 1 0,1 o/d * 0 88 SpdMul Hız Gösterge Çarpanı 1 0~9999 o/d * 120 89 CurMul Akım Gösterge Çarpanı 1 0~9999 o/d * 7 90 DisOpr· Kumanda Panelinin Devre Dışı Bırakılması 1 0,1 o/d * 0 91 MulCom· Multi-Drop Haberleşme Modu 1 0,1 o/d * 0 92 SerNum · Multi-Drop Node Adresi 1 0~255 o/d * 0
93 DevIdf Cihaz Kimlik ve Versiyon Bilgileri o 94 LocPrm · Parametre Kilidi 1 0,1 o/d 0
95 Kullanım Dışı 96 ResFun · Tüm Fonk. Değerlerinin Fabrika Ayarlarına Getirilmesi 1 0,1 d * 97 Kullanım Dışı 98 ErsErr · Hata Listesinin Silinmesi 1 0,1 d *
99 ErrLst Hata Listesi 0-00~4-99
Fonksiyon Tablosundaki Ayrıntılar Kısaltma:
SmartCom yazılımında kullanılır. O/D:
d-Sadece değiştirilebilir, o-Sadece okunabilir, o/d-okunabilir ve değiştirilebilir.
Kilit:
“*” işaretli fonksiyon Fn94 ile kilitlenir. (Kısaltma)“·
” işaretli fonksiyonun değeri sadece durma halinde değiştirlebilir. “Llm~Ulm”
aralığında bulunan fonksiyonların Hız Alt Sınırı Fn12; Hız Üst Sınırı Fn11 ile değişebilir.
olan fonksiyonlar, Fn88 hız çarpanı ile çarpılmışlardır ve gerçek hassasiyetleri %0.1 dir.
Birimi “%,Iac”
olan fonksiyonlar, Fn89 akım çarpanı ile çarpılmışlardır ve gerçek hassasiyetleri %0.4 dür.
Fab.:
Fonksiyonlara ait fabrika değerleri
5.5.1 Fonksiyon Listesine İlişkin Açıklamalar
Hızlanma ve Yavaşlama Süreleri ( Fn02, Fn04 ve Fn03, Fn05 ) Her iki yöndeki hızlanma süresi ( Fn02, Fn04 ); durma
konumundan, Fn11 ile belirlenen hız üst sınırına ulaşıncaya kadar geçen ivmelenme süresidir. Buna göre Fn00 ile belirlenen temel hız referansı, hız üst sınırından düşük ise; hızlanma süresi de aynı oranda düşük olacaktır.
Gerçek Hızlanma Süresi = Ayarlanan Hızlanma Süresi ´ Temel Hız Referansı
Hız Üst Sınırı ( 60Hz)
Örnek: Temel hız sınırı ( Fn00 ) 30Hz ve hızlanma süresi (ta) 6s’e ayarlanırsa, motorun durma konumundan 30Hz’e kadar hızlanma süresi (tg) 3s olacaktır.
Her iki yöndeki yavaşlama süresi ( Fn03, Fn05 ) ise, Fn11 ile belirlenen hız üst sınır değerinden durma konumuna ulaşıncaya kadar geçen süredir. Buna göre temel hız referansının hız üst sınır
değerinden düşük olması halinde, yavaşlama süresi de aynı oranda düşük olacaktır.
Analog Referans Girişinin Güncelleştir ilmesi ( Fn34 )
Analog referans giriş seçimi (Fn51), Bölüm 5.7.3’deki tablo yardımı ile yapılır. Bu seçimin etkinleştirilmesi için, Fn34 fonksiyonu “1” değerine ayarlanmalıdır. Şayet bu ayarlama sonrası analog giriş seçimi (Fn51) değiştirilirse, analog referans giriş güncelleştirme fonksiyonu (Fn34) kendiliğinden “0” değerini alır. Buna göre her yeni analog giriş seçimi sonrası Fn34 fonksiyonu “1” değerine getirilmelidir.
Dijital Kumanda Komutlarının Etkinleştirilmesi ( Fn62 ) Dijital giriş seçimleri, Bölüm 5.7.1’de bulunan tablo yardımı ile yapılır. Dijital giriş seçim tablosunda bulunan [ Run ( Normal Çalışma ), Jog (Kısa Süreli Çalışma ), RunFwd ( İleri Yönde Çalışma ), RunRev ( Ters Yönde Çalışma )] kumanda komutları, Fn60 ve Fn 61 fonksiyonları ile seçilebilir. Bu komutların
etkinleştirilmesi için, dijital kumanda komutlarını etkinleştirme fonksiyonu (Fn62) “1” değerine ayarlanmalıdır.
Dijital Referansların Etkinleştirilmesi ( Fn63 )
Dijital giriş seçim tablosunda bulunan [ Hız #1, Hız #2, Hız #3, Hız #4, Alternatif Hızlanma, Alternatif Yavaşlama, Hız Arttırma, Hız Azaltma, Sayıcı Sıfırlama, Hızlanma/Yavaşlama Sürelerini Arttırma, Hızlanma/ Yavaşlama Sürelerini Azaltma, Harici Sayıcı ] referanslar Fn60 ve Fn61 fonksiyonları ile seçilebilir. Bu referansların
etkinleştirilmesi için Fn63 fonksiyonu “1” değerine ayarlanmalıdır. Mesafe ( Birim ) Karşılaştırıcı ( Fn75 )
Mesafe ( birim ) karşılaştırıcı değeri Fn75 fonksiyon ile ayarlanır. Ayarlanan bu değer, mesafe ( birim ) sınır ayar değerinin ( Fn71 ) hesaplanmasında kullanılır.
( Ayrıntılar için Bölüm 5.6’daki örnek uygulamayı inceleyiniz. ) Mesafe ( Birim ) Çarpanı ( Fn77 )
Mesafe ( birim ) çarpanı, mesafe sınır ayar değeri ( Fn71 )’nin hesaplanmasında kullanılır ve temel hız referansı ( Fn00 ) ile çarpılan bir katsayıdır. Bu katsayı değeri Fn77 fonksiyonu ile ayarlanır. ( Ayrıntılar için Bölüm 5.6’daki örnek uygulamayı inceleyiniz. )
Mesafe Bandı ( Histerezis ) ( Fn76 )
Mesafe ( birim ) bandı, sürekli çalışmada belirlenen bir aralıktır. Bu aralık dahilinde, Bölüm 5.7.1’de bulunan dijital giriş referans
değerleri ( Hız #1, Hız #2, Hız #3, Hız #4,...vs. ) etkinleştirilebilir. ( Ayrıntılar için Bölüm 5.6’daki örnek uygulamayı inceleyiniz. ) Mesafe ( Birim ) Sınır Ayarı ( Fn71 )
Mesafe ( birim ) sınır ayar değeri; mesafe karşılaştırıcı değeri ( Fn75 ), temel hız referansı ( Fn00 )ve mesafe çarpanı ( Fn77 ) yardımıyla hesaplanır.
M. Sınır Ayar Değeri = M. Karşılaştırıcı + M. Çarpanı ´ Temel Hız Referansı1000
Mesafe ( birim ) sınır ayar değeri, karşılaştırma işlemi için kullanılır. Bu işlem sırasında, sürücü içindeki mesafe ( birim ) sayıcı değeri ( Fn70 ) ile mesafe sınır ayar değeri ( Fn71 ) karşılaştırılır. Bu karşılaştırma sonucu, bir dijital çıkış ( Bak. Bölüm 5.7.2’deki tablo ) olarak alınır ve dijital
girişlerde değerlendirilir. (Ayrıntılar için Bölüm 5.6’daki örnek uygulamayı inceleyiniz.)
5.6 Örnek Uygulamalar
5.6.1 Potansiyometre Ayarlı Uygulama Örneği
Bir potansiyometre yardımıyla hız referansının ayarlanması; Fonksiyon Ayarları
Adım Fn No
1 Fn51 1 Tek yönlü hız referansı analog referans girişine atanır.
2 Fn34 1 Analog referans girişi
(potansiyometre) etkinleştirilir. Potansiyometre ile iki yönlü hareket için;
1 Fn51 2 İki yönlü hız referansı analog referans girişine atanır.
2 Fn52 1 Potansiyometre sıfır merkezli olarak kullanılır.
3 Fn34 1 Analog referans girişi
(potansiyometre) etkinleştirilir. Gerekli Açıklamalar
Fonksiyon adımları sırasıyla takip edilmelidir. Analog referans giriş seçimi (Fn51) yapıldıktan sonra Fn34 fonksiyonu ile fonksiyon seçimi etkinleştirilir. Daha sonra Fn51 analog referansının
değiştirilmesi durumunda referans güncelleştirme izni kapanacaktır. Bu nedenle işlem sırası önemlidir.
Kontrol klemensi bağlantı şeması Şekil 5.6.1’de verilmiştir. 5.6.2 START/STOP Butonları ( Anahtar ) İle Harici Kumanda
Uygulama Örneği İleri ve ters yönde
Start butonu ile çalıştırma için gerekli fonksiyon ayarları Fn
No
Fn60 32 Dijital Giriş SS1Þ Ters Çalışma Dijital Giriş SS2Þ İleri Çalışma Fn62 1 Dijital Kumanda Komutlarını
Etkinleştirme İzni Durdurma için kullanılacak
Stop butonu, COM ile STOP uçları arasına bağlanır ve kullanılacak buton normalde kapalı bir buton (anahtar) olmalıdır.
Bu uygulama için gerekli bağlantı şeması Şekil 5.6.1’de verilmiştir. Klemens bağlantı şeması
Şekil 5.6.1 Kontrol Klemensi Bağlantı Şeması 5.6.3 Programlanabilir Robotik Uygulama Örneği
Tek sensörlü bir sistemde iki yönlü hareketin programlanması; Fonksiyon Ayarları
Fn No Değer Açıklama
Fn60 11 Dijital Giriş SS1 Þ Hız #1 Dijital Giriş SS2 Þ Sayıcı Sıfırlama
Fn61 32 Dijital Giriş SS3 Þ Ters Çalışma Dijital Giriş SS4 Þ İleri Çalışma Fn67 31 İleri Yönde Karşılaştırma Þ Dijital
Fn64 27 ve 29 Tek ve İki Yönlü M. Bandı Þ Dijital Çıkış NO2
Fn62 1 Dijital Kumanda Komutlarını Etkinleştirme İzni
Fn63 1 Dijital Referansları Etkinleştirme İzni
Fn06 5 Alternatif Hız Referans #1 Ayarı Fn00 50 Temel Hız Referans Ayarı
Fn75 100 Mesafe ( Birim )Karşılaştırıcı Değeri
Fn76 10 Mesafe ( Birim ) Bandı ( Histerezis )
Fn77 10 Mesafe ( Birim ) Çarpan Değeri Fn80 4 Gösterge Parametre Sayısı Fn81 40 Gösterge Parametresi #1 ( Hız
Değeri )
Fn82 43 Gösterge Parametresi #2 ( Rampa üreteç Değeri ) Fn83 70 Gösterge Parametresi #3
( Mesafe Sayıcı Değeri )
Fn84 71 Gösterge Parametresi #4 Mesafe Sınır Değeri )
Şekil 5.6.2 Kontrol Klemensi Bağlantı Şeması
Şekil 5.6.3 Mesafe Bandı (Histerezis) Uygulaması Gerekli Açıklamalar
Mesafe ( birim )sayacı ( Fn70 )
M. Sınır Ayar Değeri = M. Karşılaştırıcı + M. Çarpanı ´ Temel Hız Referansı
1000
bağıntısı ile belirlenen mesafe sınır değerine kadar sayacaktır. Fn67=31 şeklinde ayarlanarak ileri yönde karşılaştırma yapılır.
Mesafe sayıcı değeri, mesafe sınır değerinden büyük ve eşit olma koşulunda [ Fn70³ Fn71 ]; ikinci röle (NO2) dijital çıkış verir ve SS3 dijital girişi “Ters Yönde Çalış” komutu ve
rir.
İleri yönde karşılaştırma sırasında; mesafe sınır değerinden mesafe bandı (Histerezis) değeri kadar önce, motor hızı Hız #1 alternatif referans değerine atanır.
Dijital çıkış seçimlerinde; Fn64=27 ile tek yönlü mesafe bandı (histerezis), Fn64=29 ile iki yönlü mesafe bandı (histerezis) uygulanır. (Şekil 5.6.2’ e bakınız.)
Algılayıcı ( sensör )’nın bağlı bulunduğu dijital girişler SS2 ve SS4 ile sırasıyla mesafe sayacı sıfırlanır ve ileri yönde çalışma komutu verilir.
Dijital gösterge parametreleri [ Fn81~
Fn84 ], herhangi bir fonksiyon değerinin göstergede görüntülenmesi amacıyla kullanılır. Bunun için istenilen
fonksiyonun numarası (0~ 79) gösterge parametresine yazılır. Örneğin, Fn81=40 ayarı ile 1 nolu dijital gösterge parametresinde hız değeri görüntülenir.
Çok Fonksiyonlu I/O (Giriş/Çıkış) Seçimi ve Ayarları 5.7.1 Dijital Giriş Seçimi (F-60, F-61)
SS1 / SS3 SS2 / SS4
Değer Açık Kapalı Açık Kapalı
0 Geçersiz Giriş 1 Hız #1 Hız #2 2 3 Hız #3 Hız #4 4 5 Hız #1 Altern. Hızlanma 6 Hız #3 Altern. Hızlanma
7 8 9 Hız Arttırma Hız Azaltma 10 11 Hız #1 Sayıcı Sıfırlama
12 Harici Sayıcı Sayıcı
Sıfırlama 13 Hızlan. Arttırma Hızlan.
Azaltma 14 Yavaşl. Arttırma Yavaşl.
Azaltma 15 16 17 Hız #1 Kısa Süre Çal. 18 Hız #3 Kısa Süre Çal. 19 Kısa Süre Çal.
20 Altern.Hızlanma Kısa Süre Çal.
21
22 İleri Ters Kısa Süre
Çal. 23
24 Kısa Süre Ters Kısa Süre
İleri 25 Hız #1 Normal Çalış. 26 Hız #3 Normal Çalış. 27 28 Altern.Hızlanma Normal Çalış.
29 Kısa Süre Çal. Normal
Çalış.
30 İleri Ters Normal
Çalış. 31
Çalışma
5.7.2 Dijital Çıkış Seçimi (F-64, F-67)
Değer Açıklama Formül
0 Kullanım Dışı 1 Sürücü Sürekli Çalışıyor 2 Sürücü Kısa Süreli Çalışıyor 3 Dönüş Yönü Ters 4 Hata Oluştu 5 Sürücü İleri Yönde Çalışıyor 6 Sürücü Ters Yönde Çalışıyor 7 Hız Sıfırlandı 8 Hız Kilitlendi
9 Kullanım Dışı 10 Aşırı Akım Kontrolü Aktifleşti 11 Kullanım Dışı 12 SS1 Yansıması 13 SS2 Yansıması 14 SS3 Yansıması 15 SS4 Yansıması 16 Kullanım Dışı 17 Gerçek Hız > Hız Referansı F-40>F-00 18 Gerçek Hız > Hız Ref #1 F-40>F-06 19 Gerçek Hız > Hız Ref #2 F-40>F-07 20 Gerçek Hız > Hız Ref #3 F-40>F-08 21 Gerçek Hız > Hız Ref #4 F-40>F-09
22 Gerçek Hız > Hız Üst Sınırı F-40>F-11 23 Gerçek Hız > Hız Alt Sınırı F-40>F-12 24 Gerçek Hız > Harici Ref Değeri
F-40>F-50 25 Kullanım Dışı 26 Kullanım Dışı 27 TekYönlü Karşılaştırma, TekYön Histerezis Rev*(Cnt£ Hys) +Fwd*(Cnt³ (Ofs-Hys)) 28 İkiYönlü Karşılaştırma, TekYönlü Histerezis Rev*(Cnt£ (Hys-Ofs)) +Fwd*(Cnt³ (Ofs-Hys)) 29 TekYönlü Karşılaştırma, İkiYönlü Histerezis (Cnt£ Hys)+(Cnt³ (Ofs-Hys)) 30 İkiYönlü Karşılaştırma, İkiYönlü Histerezis (Cnt£ (Hys-Ofs))+ (Cnt³ (Ofs-Hys)) 31 İleri Yönde Karşılaştırma Cnt³ Ofs
32 Ters Yönde Karşılaştırma
Cnt£ -Ofs
5.7.3 Analog Referans Giriş Seçimi (F-51)
Değer Açıklama 0 -1 Hız Referansı 2 Yönlü Hız Referansı 3 -4 -5 Hızlanma Süresi 6 Yavaşlama Süresi 7 -8
-9 Kısa Süreli Çalışma Hız Referansı
10
-12 -13 Hız Referansı #1 14 Hız Referansı #2 15 Hız Referansı #3 16 Hız Referansı #4 5.7.4 Analog Çıkış Seçimi (F-56)
Değer Açıklama İkiYön
0 -1 Hız Değeri * 2 Akım Değeri * 3 -4 -5 Harici Referans #1 Değeri 6
-7 Hız Mux Değeri * 8 -9 Rampa Üreteç Değeri * 10 % Motor Faz Gerilimi (250Vac’a göre ) 11 -12 % DC-Bara Gerilimi (500Vdc’a göre ) 13 -14 Hız Referansı 15 -16 -Bölüm 7 İlk Çalıştırma
7.1 İlk Çalıştırmadan Önce Dikkat Edilmesi Gerekenler
Montaj ve bağlantıların tamamlanmasından sonra dikkat edilmesi gerekenler:
Kablo bağlantılarını kontrol edin.
Güç bağlantılarının yanlış yapılması sürücüye zarar verecektir. Kısadevre kontrolü yapın.
Klemens vidalarının sıkılı olmasına dikkat edin. Giriş güç bağlantılarını kontrol edin.
TNV1x sürücü fazına 380Vac bağlantı yapılması cihaza zarar verir. TNV3x sürücü fazına 220 Vac bağlantı yapılması halinde (E-21) hatası oluşur.
Motor veya çıkış uçlarında, kısadevre veya toprak bağlantısı olmamasına dikkat edin.
Alınması Gereken Önlemler
Motor mili tamamen durmadan sürücüyü tekrar çalıştırmayın. Çok küçük yüklerde dahi; motor etiketindeki akım değeri,
OptiDrive’ın anma akım değerini aşan motorlar kullanmayın. Motoru durdurmak veya çalıştırmak için harici kumandayı veya
dijital kontrol panelindeki RUN/STOP tuşlarını kullanın.
Bölüm 8 Hata Durumları
OptiDrive sürücüde hatalı bir durum oluşursa, ilgili hata kodu (E-xx) olarak göstergede görüntülenir. Bu hata kodu, oluşan hatanın içeriğini bildirecektir.. Bunun yanında hata kodlarından son beş tanesi otomatik olarak (Fn99)’da hafızaya kaydedilir.
Hata Kodu Açıklama Muhtemel Sebep Yapılması Gereken E-00 Arıza Yok
E-01 “Enb” İzin Girişi Aktif Değil
“Enb” girişi açık bırakılmış veya dış devre hatası var.
“Enb”girişini kontrol edin.
E-04 Geçersiz Giriş Seçimi Hatalı değer, Fn60 ve Fn61 aynı değerde seçilmiş. F-60 & F-61’i kontrol edin, gerekirse değiştirin E-10 Çıkış Uçlarında Kısadevre Var Motor hatası veya kablo bağlantı hatası Motor ve motor kablolarını kontrol edin
E-11 Aşırı Akım Hızlanma süresi çok küçük veya motor aşırı yükte
Motor değerlerini veya milini, yükü kontrol edin
E-12 Akım İzleme Hatası
İç devre hatası Yetkili servisi çağırın. E-20 DC-Barada Aşırı Gerilim Frenleme dirençlerini kontrol edin, gerekirse daha büyük direnç kullanın. E-21 Düşük Şebeke Gerilimi Şebeke hatası veya hatalı kablo bağlantısı Şebeke gerilimini ve güç klemensini kontrol edin
E-22 Şebeke İzleme Hatası
İç devre hatası Yetkili servisi çağırın
E-31 E²prom Hatası Cpu (merkezi işlemci) e²prom hafıza ile haberleşemiyor. Tekrar bağlantı yapmayı deneyin, hata tekrarlanırsa yetkili servisi arayın.
E-33 İşlemci Zaman Takip Hatası
İç devre hatası Tekrar bağlantı yapmayı deneyin, hata tekrarlanırsa yetkili servisi arayın
E-97 Dijital Kontrol Paneli ile Sürücü Uyumsuz Dijital kontrol paneli uyumsuz Dijital kontrol panelini çıkarın
E-98 Dijital Kontrol Paneli ile Sürücü Uyumsuz Dijital kontrol paneli uyumsuz Dijital kontrol panelini çıkarın
E-99 Dijital Kontrol Paneli
Haberleşme Hatası
Dijital kont. pan uyumsuz veya sürücü
çalışmıyor
Dijital kont. panel bağlantısını
kontrol edin.Hata tekrarlanırsa yetkili servisi çağırın Tablo 9.1 Hata Durumları