708 Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252
SISTEM PENGGENDALI KECEPATAN PUTARAN
MOTOR AC PHASA SATU
MENGGUNAKAN MIKROKONTROLLER AT89S8252
A. Sofwan dan Rudie S. BaqoTeknik Elektro, Fakultas Teknologi Industri Institut Sains Dan Teknologi Nasional, Jakarta E-mail: [email protected] HP:08128924387 Abstrak
Pengaturan kecepatan Motor AC Phasa Satu banyak dilakukan dengan berbagai cara, seperti dengan kontaktor, relay, dan modulasi lebar pulsa. Pengendali kecepatan motor dalam teknologi elektronika menggunakan teknik pengoperasian modulasi lebar pulsa dengan mengendalikan penyulutan sudut phasa listrik, dapat mempermudah pengendalian kecepatan putaran motor. Dengan terjadinya perubahan penyulutan sudut phasa, maka terjadi perubahan tegangan. Perubahan tersebut mengakibatkan perubahan kecepatan putaran motor. Sehingga diharapkan menghasilkan produksi yang optimal. Pengaturan kecepatan putaran motor yang sederhana dapat dilakukan dengan rangkaian Analog Controller Interface yang dioperasikan dengan bantuan sistem Mikrokontroller. Dengan sistem pengendalian ini kita dapat mengatur kecepatan putaran yang diinginkan.Dalam makalah ini akan diuraikan suatu system pengendalian kecepatan putaran motor dengan bantuan peranan mikrokontroler jenis AT89S8252.
Kata Kunci: Pengatur Kecepatan,Microcontroller, phase Satu and Motor AC.
1. Pendahuluan
Pada era industri modern saat ini, kebutuhan terhadap alat produksi yang tepat guna sangat diperlukan dapat meningkatkan effesiensi waktu dan biaya. Sebagian besar alat industri menggunakan tenaga listrik sebagai energi penggerak utamanya, dan sebagian besar dari peralatan mesin-mesin tersebut masih mempergunakan cara-cara manual, terutama dalam hal untuk memindah-mindahkan kecepatan. Dengan demikian maka dirasakan sangat perlu untuk meningkatkan keandalan dari mesin-mesin tersebut dilengkapi dengan suatu sistem pengendali yang mampu mengatur sistem secara keseluruhan. Dalam hal ini maka peranan peralatan elektronika daya sebagai penunjang kelancaran proses otomatisasi produksi sangat menentukan. Diharapkan dengan melakukan sistem otomatisasi dapat mempermudah pekerjaan yang dilakukan manusia. Terutama hal tersebut dibutuhkan dalam jenis pekerjaan yang menuntut suatu ketelitian, kerutinitasan, kekuatan dan kemampuan untuk melakukan pekerjaan dalam waktu yang lama.
Di berbagai perindustrian banyak menggunakan mesin-mesin dengan penggerak uatamanya adalah Motor AC Phasa Satu. Yang mana pada umumnya digunakan pada mesin produksi seperti mesin bubut, mesin bor, dan sebagainya. Dalam aplikasi yang sebenarnya di industri, bukan hanya jenis motor listrik itu saja yang menjadi pertimbangan, tetapi juga system pengaturan kecepatannya. Kemampuan pengaturan besarnya suatu kecepatan putaran motor tergantung pada bentuk dan konstruksi motor serta rangkaian system pengendali kecepatan putaran motor. Pengaturan kecepatan putaran motor yang sederhana dapat dilakukan dengan bantuan dari suatu rangkaian Analog Controller Interface yang dioperasikan dengan bantuan sistem Mikrokontroller. Dengan sistem pengendalian kecepatan tersebut akan dapat diatur kecepatan putaran yang sesuai dengan yang diinginkan. Hal tersebut dapat dilakukan hanya dengan cara menekan tombol yang ada diinginkan pada system tersebut. Sedangkan system penyettingan yang dilakukan dapat dilihat pada tampilan (display) yang akan menampilkan dalam bilangan hexadecimal.
Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 709
2. Motor Induksi Phasa Satu
2.1 Rangkaian Ekivalen Motor Induksi Phasa Satu
Motor induksi satu fasa terdiri kumparan stator dan kumparan rotor. Kumparan stator dan rotor masing-masing terdiri dari parameter resistansi “R’, reaktansi “jX”dan lilitan penguat “N”. rangkaian ekivalen dari motor induski satu fasa dapat dilihat pada gambar di bawah ini.
Gambar 2. Rangkaian ekivalen motor induksi sederhana.
Gambar 3. Rangkaian pengganti motor induksi satu fasa. Nilai arus suber bolak-balik satu fasa dapat dirumuskan sebagai berikut :
I1 = IØ + I2’ (1)
Besarnya arus pemaknitan IØ yang timbul akibat adanya induksi yang terjadi antara medan stator dan
rotor adalah :
IØ = Ir + Im (2)
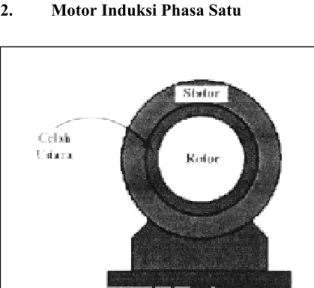
Gambar 1. Konstruksi motor induksi satu fasa
Konstruksi motor induksi satu fasa terdiri atas dua komponen yaitu stator dan rotor. Stator adalah bagian dari motor yang tidak bergerak dan rotor adalah bagian yang bergerak yang bertumpu pada bantalan poros terhadap stator. Motor induksi terdiri atas kumparan-kumparan stator dan rotor yang berfungsi membangkitkan gaya gerak listrik akibat dari adanya arus listrik bolak-balik satu fasa yang melewati kumparan-kumparan tersebut sehingga terjadi suatu interaksi induksi medan magnet antara stator dan rotor. Bentuk dan konstruksi motor tersebut digambarkan pada gambar 1.
710 Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 masing sebesar E1 dan E2 adalah :
E1 = I2’ (Rs +jXs) (3) + = r jXr S R I E2 2 (4)
Impedansi pada kumparan motor stator dan rotor masing-masing adalah :
jXs = jωs Ls (5)
jXr = jωr Lr (6)
2.2 Prinsip Kerja Motor Induksi Phasa Satu
Apabila kumparan-kumparan motor induksi satu fasa dialiri arus bolak-balik satu fasa, maka pada celah udara akan dibangkitkan medan yang berputar dengan kecepatan putaran sebesar dengan menggunakan rumus :
[
ppm]
menit putaran p f ns . 120 = (7) atau, p f sπ
ω
=2 (8)Medan magnet berputar bergerak memotong lilitan rotor sehingga menginduksikan tegangan listrik pada kumparan-kumparan tersebut. Biasanya lilitan rotor berada dalam hubung singkat. Akibatnya lilitan rotor akan mengalir arus listrik yang besarnya tergantung pada besarnya tegangan induksi dan impedansi rotor. Arus listrik yang mengalir pada rotor akan mengakibatkan medan magnet rotor dengan kecepatan sama dengan kecepatan medan putar stator (ns). interkasi medan stator dan rotor akan membangkitkan torsi yang menggerakkan rotor berputar searah dengan arah medan putar stator. Interaksi medan stator dan rotor juga menyebabkan terjadinya ggl induksi yang disebabkan oleh kumparan-kumparan stator dan rotor. Rumusan matematis gaya gerak listrik yang terjadi pada motor induksi satu fasa dengan rumus sebagai berikut:
dt d N
φ
(t )ε
=− (9)Dimana nilai dari Ф(t) untuk fluksi maksimum akibat dari penyebaran kerapatan fluks yang melewati lilitan dengan rumus :
Ф(t) = Фmax. cosωt (10)
Adanya perbedaan medan putar stator dan medan putar rotor atau yang disebut slip pada motor induksi satu fasa pada rumus sebagai berikut:
s r s s r s n n n s atau s= − = −
ω
ω
ω
(11)Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 711 2.3 Hubungan Torsi dan Slip pada Motor
Berubah-ubahnya kecepatan motor induksi (ns) akan mengakibatkan harga slip dari 100% pada saat start hingga 0% pada saat motor diam (nr-ns). torsi yang dihasilkan selama motor induksi satu fasa berputar tergantung pada perubahan slip dan perubahan dalam Newton.meter. Perubahan pembebanan dapat terjadi dengan naiknya nilai tegangan dan arus pada rotor. Hubungan torsi (Td) terhadap parameter impedansi stator, impedansi rotor, arus rotor, tegangan sumber dan kecepatan sudut secara umum dapat dirumuskan sebagai berikut :
Arus rotor (Ir) yang dihasilkan pada motor induksi satu fasa pada rumus :
(
) (
)
[
2]
1/2 / s r r s s r X X S R R V I + + + = (12)(
) (
)
[
2]
2 2 / . r s r s s s r r X X S R R s V R I + + + =ω
(13)Karakteristik torsi terhadap perubahan slip saat 100% pada saat start hingga 0% pada saat motor diam (nr = ns) pada motor induksi satu fasa dapat dilihat pada gambar dibawah ini.
Gambar 4. karakteristik Td = f(s) dan n/ns = f(s)
3. Perancangan dan Pembahasan
3.1 Perancangan Perangkat Keras
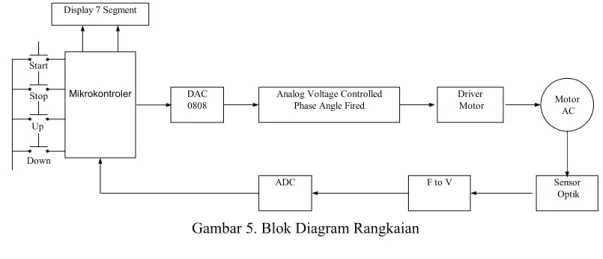
Pada gambar 1 ditunjukan diagram system, dimana blok diagram system tersebut terdiri dari :
Gambar 5. Blok Diagram Rangkaian
T/Tmaks Motor Generator s 1 0 - 1 - 2 Mikrokontroler Display 7 Segment DAC 0808 ADC
Analog Voltage Controlled Phase Angle Fired
Driver Motor Motor AC Sensor Optik F to V Start Stop Up Down
712 Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 Adapun cara kerja dari system tersebut diurakan secara umum sebagai berikut:
1 Minimum sistem AT89C51 berfungsi untuk menerjemahkan perintah yang dimasukan melalui keyped.
2. Rangkaian analoge controlled phase-angel fired yang berfungsi menerjemahkan perintah yang dikeluarkan oleh sistem mikrokontroller.
3. Motor berfungsi memutar piringan yang dihubungkan memlaui poros pemutar.
4. Input set point (sp) berupa keyped yang berfungsi untuk memasukan data kecepatan putar motor yang diinginkan.
5. Rangkaian ADC yang berfungsi menerima presena value(pu) dari kecepatan putaran motor yang terdeteksi oleh sensor optic
6. Rangkaian DAC yang mengubah data-data digital ke dalam sinyal analog controller pahse-angle fired sehingga sinyal ini dapat langsung mengendalikan motor.
7. Rangkaian F/V yang mengkonversikan frekuensi yang dihasilkan oleh sensor optic ke tegangan yang merupakan present value yang diterima oleh ADC.
8. Display berfungsi untuk menampilkan data set (SP) dan kecepatan putar piringan. 3.2 Rangkaian Analog Voltage Controled Phase Angle Fired Power Interface
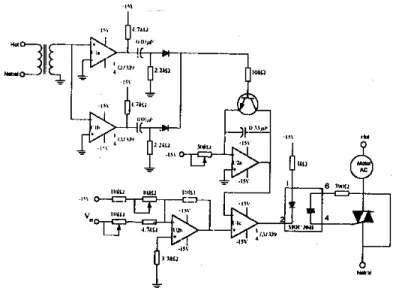
Gambar 6 menggambarkan tentang skema pengukur sudut phasa, dimana sudut phasa konduksinya dikendalikan sebuah input tegangan analog. Gambar tersebut dibagi menjadi 4 bagian utama, yaitu: Generator pulsa, lintas nol, (U1a dan U1b) generator ramp tersinkronisai (U2a) pengkondisi sinyal Zera span (U2b) dan komparator dengan penyulut (U1c dan U3).
Gambar 6. Analog Votage Controlled Phase Angle Fired Power Interface
Penyulut analog terendah iniharus disinkronisasi terhadap tegangan lintas nol jala-jala. Iniadalah kegunaan dari transformer, komparator U1a dan U1b, pembentuk gelombang dengan menggunakan RC dan beberapa dioda. Kedua komparator menghasilkan gelombang kotak 30Vpp yang berganti-ganti sebagaimana tegangan jala-jala melintasi nol. Jika salah satu komparator dihubungkan secara inverting dan lainnya non-inverting menghasilkan gelombang kotak dengan polaritas yang berlawanan. Jaringan RC membentuk gelombang kotak tersebut pada kejutan positif dan negative sekkitar 100µ detik. Dioda melewatkan hanya pulsa positif satu pada lintas nol dari U1a dan lintas nol lainnya dari U1b karena adanya feedback negative infut inverting op-amp ditahan pada ground semu. Konstanta arusnya adalah:
Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 713 rate ramp R V I _ 15 = (14)
Yang mengalilr dari output ramp, melalui kapasitor dan Rramp_rate menuju -15 V. selama arusnya constant kapasitor akan mengisi pada harga yang konstant yang menghasilakn sebuah ramp pengatur :
Rramp_rate = 37,7 kΩ Yang menghasilkan arus pengisian
A k V I 398
µ
7 , 37 15 = Ω =Mengisi 0,33 µF dengan sebesar 398 µA menghasilkan
dt dv C I Rramp_rate: = 15) s V F A C I t v Rramp rate 1206 33 , 0 298 : _ ∆ = = = ∆
µ
µ
Pada setiap lintas nol pulsa dari U1a atau U1b mensaturasi Q1. hal ini akan menghubungkan singkat kapasitor ramp. Memaksa untuk mengosongkan secara cepat. Jadi pada setiap lintas nol pada jala-jala ramp diulang lagi. Tanjakan ini berkesinambungan untuk sebuah setengah siklus dari jala-jala 8,3m/s ia akan menanjak naik.
∆v = (ramp_rate)∆t 16)
∆v = ( 1206V/s)(8,3ms) = 10v
U2 menghasilkan ramp yang dimulai pada 0V dan meningkatkan secara linier ke 10 V selama 8,3 milidetik dari setengah silus jala-jala. Amfilfier zero span mempunyai persamaan :
(
v)
k R k V K R k V zero in span a 10 15 10 7 , 4 10 − Ω + Ω − Ω + Ω − = (17) Dengan Rspan = 5,3 kΩ Rzero = 5 kΩ Vout = -Vin + 10 VHal ini akan menginvert secara linier dan mengoffset tegangan input. Selama ramp dibawah Va output dari kelompok U1c akan terbuka dan triac dalam keadaan mati, tetapi selama ramp meningkat, data Va output dan U1c akan terhubung singkat ke -15 V. sehingga akan menjalankan led pada MOC3041 dan menghidupkan triac.
714 Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 3.3 DAC (Digital Analog Converter)
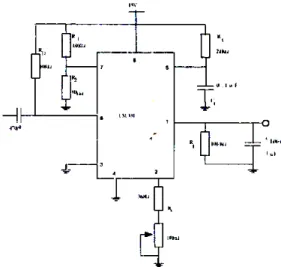
Rangkaian pengubah digital ke analog (DAC) dapat dilihat pada gambar 7 dibawah ini :
Gambar 7. Rangkaian Digital to Analog Converter Jika diketahui : Vref = 5 Vdc, R14 = R15 = 1kΩ, R0 = 2kΩ Maka besar Vo : + + + + + + + = 256 128 64 32 16 8 4 2 8 7 6 5 4 3 2 1 14 A A A A A A A A R R V V o ref o (18)
Menyesuaikan Vref , R14, atau Ro juga Vo dengan semua digit input level tinggi sama dengan 9,961 Volt. Input DAC 0808 dihubungkan port 1 AT89S8252 dan Vo-nya dihubungkan ke Vin Analog Voltage Controlled Phase Angel Fired Interface. DAC 0808 mengkonversi arus yang memasuki input menjadi tegangan pada outputnya.
3.4 Pengubah Frekuensi Ke Tegangan
Keluaran tegangan yang akan dihasilkan adalah 5 Volt untuk kecepatan putar maksimum motor 2850 Rpm = 47,5 Hz, karena lubang pada piringan berjumlah 8 maka dimana frekuensi maksimum yang didapat dari sensor optic adalah 8 x 47,8 = 380 Hz. Kemudian menentukan nilai Rt dan Ct. fm = 2850 rpm = 47,5 Hz 8 fm = 8 x 47,5 = 380 Hz t t m C R f . . 1 , 1 1 8 = , ditentukan : Ct = 0,1 µF (19) t m t C f R . 8 . 1 , 1 1 = (20)
Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 715 Tegangan yang diinginkan 5 Volt pada saat frekuensi Maximum = 380 Hz, maka dengan demikian diperoleh: in s t t t Ave f R R C R V V =2 .1,1. . . . (21) 380 . . 380 1 . 2 5 S L R R V V= (21) S L R R V V 2 . 5 = ditentukan RL = 100 KΩ (22) Maka didapatkan besar RS yang dinginkan adalah: 40KΩ
Gambar 8 Rangkaian Pengubah Frekuensi ke Tegangan 3.5 ADC (Analog to Digital)
Untuk memperoleh jangkaun input 0-5 Volt, input Vref/2 dihubungkan tegangan 2,5 volt.
Gambar 9 Rangkaian Analog to Digital Converter
KHz
hz
x
C
R
F
Jam
Frekuensi
volt
V
K
K
K
Vcc
R
R
R
V
t ref650
649350
10
140
.
10
.
1
,
1
1
.
.
1
,
1
1
:
5
,
2
5
.
2
2
2
.
2
1
2
2
/
12 4 3≈
=
=
=
=
+
=
+
=
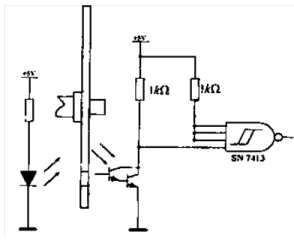
−716 Sistem Penggendali Kecepatan Putaran Motor Ac Phasa Satu Menggunakan Mikrokontroller At89s8252 Sensor optik merupakan transduser kecepatan yang merubah kecepatan putar motor menjadi pulsa periodic. Hal ini dapat dicapai dengan bantuan sumber cahaya dengan menggunakan infra merah, phototransistor dan sebuah IC SN7413 nand gate schimitt trigger, seperti terlihat pada gambar dibawah ini.
Gambar 10. Sensor Optik
4. Kesimpulan
Dari uaraian tersebut diatas maka dapat ditarik kesimpulan bahwa:
Alat ini sangat memungkinkan digunakan untuk mengendalikanmotor ac phasa satu secara otomatis
sehingga dapat memberi kemudahan dalam proses pengaturan kecepatan motor ac phasa satu dengan menggunakan teknologi elektronika berbasis mikrokontroler AT89S8252 .
5. Daftar Pustaka
[1] Michael,Jacob J, Industrial Control Elektronics Aplication Design, Prentice Hall Internasional, Engle, Wood Cliffs, New Jeresey, 07623.
[2] Kaeser, Joe, Electrical Power Motor, Control, Generator, Transformers, The Good Heatern Willcox Company, Inc, South Holand, 1991.
[3]. Zuhal, Dasar Teknik Tenaga Lisrtrik dan Elektronika Daya, Edisi kelima, Gramedia, Jakarta, 1995
[4]. Lister, Eugene C, Mesin Dan Rangkaian Listrik, Erlangga, Jakarta,1984.
[5]. B.L.THERAJA, A Text-Book of Electrical Technologi, Volume II AC&DC, Publication Division of Nirja Construction & Development CO. (P) Ltd, RAM Nagar, New Delhi, 1991.
[6]. Albbert Paul Malvino, Ph.D, Elektronika Komputer Digital, Pengantar Mikrokomputer, Edisi Kedua, Erlangga, Jakarta, 1996.
Disini phototransistor akan menerima cahaya pada LED tepat berada pada pposisi satu garis dengan lubang dan phototransistor. Bila phototransistor menerima cahaya, maka ia akan bekerja dan arus mengalir dari Vcc ke R dan phototransistor, sehingga kaki 9 dari IC SN7413 berada pada logika 0 dan output kaki 3 akan menuju logic 1. Begitu juga sebaliknya, bila piringan menutupi cahaya, maka semua input NAND gate berada pada logika 1 dan output kaki 8 menuju logika 0. Kejadian tersebut diatas akan berulang kembali selama piringan berputar, sehingga pada output NAND gate schimitt trigger akan diperoleh bentuk pulsa periodic yang ekivalen dengan kecepatan putar motor.