Abstrak—Gangguan hubung singkat merupakan gangguan yang sering terjadi pada peralatan industri, dan gangguan tersebut sangat berpotensi untuk merusak peralatan industri termasuk motor induksi. Perawatan yang kurang baik pada motor induksi dapat menyebabkan kondisi tidak seimbang. Arus urutan negatif, arus urutan positif, dan arus urutan nol kemudian digunakan sebagai pendeteksi gangguan hubung singkat impedansi tinggi pada stator motor induksi. Dari hasil simulasi penelitian yang dilakukan dengan kondisi motor induksi seimbang dan tidak seimbang pada belitannya, dapat dilihat arus urutan negatif sangat sensitive terhadap kondisi hubunng singkat antar belitan di fasa A.
Kata Kunci—Motor induksi, stator, hubung singkat, motor tidak seimbang, arus urutan negatif, arus urutan positif, arus urutan nol.
I. PENDAHULUAN
eperti yang sering terjadi dalam industri, 36% kejadian kegagalan pada motor induksi terjadi karena adanya kegagalan pada belitan stator, dan terbukti bahwa gangguan ini bermula dari gangguan antar belitan yang tidak terdeteksi [1,2]. Hal itu bisa terjadi dikarenakan gangguan hubung singkat phasa ke phasa atau gangguan hubung singkat phasa ke tanah. Untuk mengetahui gangguan hubung singkat tersebut, maka diperlukan pendeteksi yang berfungsi untuk mendeteksi gangguan belitan yang ada pada stator [1,2]. Efek ganguan hubung singkat pada motor tersebut bisa menyebabkan terbakarnya motor tersebut dan memperpendek usia penggunaan motor. Salah satu pendeteksi yang bisa kita gunakan ketika motor induksi tersebut terjadi gangguan unbalanced saat ini yaitu menggunakan relay voltage unbalance
.
II. URAIANPENELITIAN
Motor induksi tiga fasa mempunyai tiga bagian penting yaitu stator, celah udara, dan rotor. Stator adalah bagian motor induksi yang diam terdiri dari badan stator, inti stator, belitan stator, bearing, dan terminal box. Inti stator terbuat dari besi lunak. Alur stator merupakan tempat meletakkan belitan (kumparan) stator. Celah udara berada di antara stator dan rotor yang merupakan ruangan antara stator dan rotor. Pada celah ini fluks yang diinduksikan oleh kumparan stator memotong kumparan rotor sehingga rotor berputar. Apabila celah udara antara stator dan rotor terlalu besar akan mengakibatkan
efisiensi motor induksi yang rendah. Sebaliknya, apabila jarak antar celah udara terlalu kecil akan menimbulkan kerusakan mekanis pada mesin. Rotor adalah bagian dari motor yang berputar. Yang membedakan antara motor induksi dengan motor sinkron adalah pada bagian rotor. Motor induksi memiliki dua macam rotor yaitu rotor sangkar (squirrel-cage rotor) dan rotor gulung (wound rotor). Rotor sangkar adalah bagian dari mesin yang berputar bebas dan letaknya bagian dalam, sedangkan rotor gulung dihubungkan bintang dibagian dalam dan ujung yang lain dihubungkan dengan slip ring ke tahanan luar.
Motor induksi beroperasi karena terdapat medan magnet pada stator. Medan magnet stator dibangkitkan dari tiga set kumparan yang secara ruang diletakkan dengan selisih sudut 𝟐𝝅𝟑 atau 120° yang kemudian dicatu dengan tegangan tiga fasa sehingga mengalir arus stator. Arus tersebut akan menghasilkan medan magnet Bs, yang mana putarannya berbanding terbalik dengan arah jarum jam [3]. Akibat perbedaan putaran antara medan putar stator dengan putaran rotor maka dalam rotor akan terbangkit gaya-gaya listrik yang mengakibatkan dalam rotor timbul arus listrik. Arus listrik ini menimbulkan suatu medan magnet yaitu medan magnet rotor, adannya medan magnet pada rotor ini mengakibatkan rotor berputar mengikuti medan putar stator. Dalam operasi motor induksi akan menimbulkan 3 macam arus yang akan dianalisa yaitu:
A. Arus Urutan Positif
Arus urutan positif terdiri dari arus tiga fasa seimbang (simetris) dan tegangan tiga fasa (fasa ke netral) yang dipasok oleh sistem pembangkit tenaga listrik. Dalam hal ini baik arus maupun tegangan besarnya selalu sama dan mempunyai pergeseran sudut 120. Untuk sistem daya yang mempunyai urutan fasa a, b, c, kelompok tegangan pada dasarnya sama kecuali tegangan tersebut merupakan tegangan fasa ke netral dari sistem tiga fasa, dan mempunyai pergeseran 120 derajat. Baik arus maupun tegangan merupakan putaran fasor yang berlawanan dengan arah jarum jam pada frekuensi sistem. B. Arus Urutan Negatif
Arus urutan negatif pada motor induksi muncul ketika kondisi tidak seimbang dan kondisi hubung singkat. Tetapi, arus urutan negatif tidak muncul ketika motor pada kondisi stabil. Walaupun motor tersebut diberikan pembebanan lebih.
Simulasi dan Deteksi Hubung Singkat
Impedansi Tinggi pada Stator Motor Induksi
Menggunakan Arus Urutan Negatif
Muhammad Amirul Arif, Dimas Anton Asfani dan I.G.N Satriyadi Hernanda
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected], [email protected], [email protected]
Ini yang membedakan arus urutan negatif dengan arus urutan positif yang selalu muncul pada kondisi seimbang ataupun tidak seimbang.
C. Arus Urutan Nol
Arus urutan nol adalah arus yang akan muncul ketika ada gangguan fasa ke tanah. Sehingga ketika tidak terjadi gangguan fasa ke tanah arus urutan nol tidak muncul.
III. PERMODELAN MOTOR INDUKSI
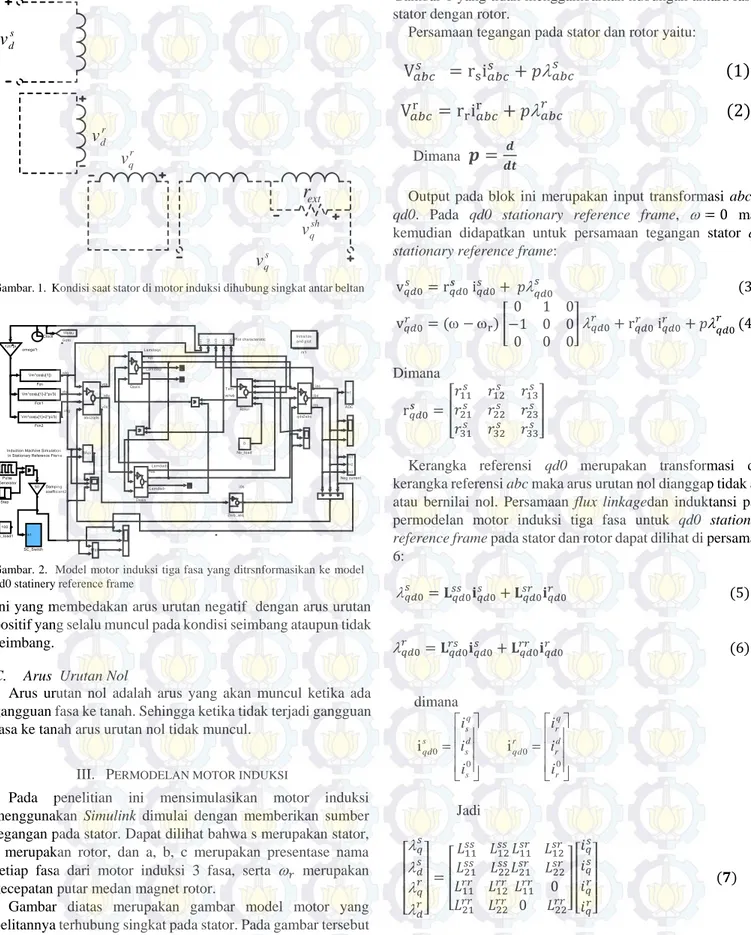
Pada penelitian ini mensimulasikan motor induksi menggunakan Simulink dimulai dengan memberikan sumber tegangan pada stator. Dapat dilihat bahwa s merupakan stator, r merupakan rotor, dan a, b, c merupakan presentase nama setiap fasa dari motor induksi 3 fasa, serta 𝑟 merupakan
kecepatan putar medan magnet rotor.
Gambar diatas merupakan gambar model motor yang belitannya terhubung singkat pada stator. Pada gambar tersebut terlihat hubungan dari q-axis dan d-axis. Pada q-axis terlihat adanya hubung singkat. Hal ini menyebabkan adanya gangguan pada stator. Motor induksi menggunakan hubungan 3 fasa maka fasa nol dianggap tidak ada. Hal ini dapat dilihat pada
Gambar 1 yang tidak menggambarkan hubungan antara fasa 0 stator dengan rotor.
Persamaan tegangan pada stator dan rotor yaitu:
V
𝑎𝑏𝑐𝑠= r
si
𝑎𝑏𝑐𝑠+ 𝑝
𝑎𝑏𝑐𝑠(1)
V
𝑎𝑏𝑐r= r
ri
𝑎𝑏𝑐r+ 𝑝
𝑎𝑏𝑐𝑟(2)
Dimana𝒑 =
𝒅 𝒅𝒕Output pada blok ini merupakan input transformasi abc ke qd0. Pada qd0 stationary reference frame, = 0 maka kemudian didapatkan untuk persamaan tegangan stator qd0 stationary reference frame:
v𝑞𝑑0𝑠 = r𝑞𝑑0𝒔 i𝑞𝑑0𝑠 + 𝑝𝑞𝑑0 𝑠 (3) v𝑞𝑑0𝑟 = (−r) [ 0 1 0 −1 0 0 0 0 0] 𝑞𝑑0𝑟 + r𝑞𝑑0𝑟 i𝑞𝑑0𝑟 + 𝑝𝑞𝑑0 𝑟 (4) Dimana r𝑞𝑑0𝒔 = [ 𝑟11𝑠 𝑟12𝑠 𝑟13𝑠 𝑟21𝑠 𝑟22𝑠 𝑟23𝑠 𝑟31𝑠 𝑟32𝑠 𝑟33𝑠 ]
Kerangka referensi qd0 merupakan transformasi dari kerangka referensi abc maka arus urutan nol dianggap tidak ada atau bernilai nol. Persamaan flux linkagedan induktansi pada permodelan motor induksi tiga fasa untuk qd0 stationary reference frame pada stator dan rotor dapat dilihat di persamaan 6: 𝑞𝑑0𝑠 = 𝐋𝑠𝑠𝑞𝑑0𝐢𝑞𝑑0𝑠 + 𝐋𝑠𝑟𝑞𝑑0𝐢𝑞𝑑0𝑟 (5) 𝑞𝑑0𝑟 = 𝐋𝑟𝑠𝑞𝑑0𝐢𝑞𝑑0𝑠 + 𝐋𝑟𝑟𝑞𝑑0𝐢𝑞𝑑0𝑟 (6) dimana 0 0 0 0 i i r d r q r r qd s d s q s s qd i i i i i i Jadi [ 𝑞𝑠 𝑑𝑠 𝑞𝑟 𝑑𝑟] = [ 𝐿𝑠𝑠11 𝐿12𝑠𝑠 𝐿21𝑠𝑠 𝐿22𝑠𝑠 𝐿11 𝑠𝑟 𝐿12𝑠𝑟 𝐿𝑠𝑟21 𝐿𝑠𝑟22 𝐿𝑟𝑟11 𝐿𝑟𝑟12 𝐿𝑟𝑟21 𝐿𝑟𝑟22 𝐿𝑟𝑟11 0 0 𝐿𝑟𝑟22][ 𝑖𝑞𝑠 𝑖𝑞𝑠 𝑖𝑞𝑟 𝑖𝑞𝑟] (𝟕)
Kerangka referensi qd0 merupakan transformasi dari
kerangka referensi abc maka arus urutan nol dianggap tidak ada
Gambar. 2. Model motor induksi tiga fasa yang ditrsnformasikan ke model qd0 statinery reference frame
Induction Machine Simulation in Stationary Reference Frame
i0s vqs Tem wr/wb vag vcg vbg v0s Lamdaqs iqs Lamdaqr ibs ics vds Lamdads ids Lamdadr ias qds2abc 120*pi omega*t Initialize and plot m1 abc2qds Zero_seq Step In1 SC_Switch Rotor Qaxis Pulse Generator
In1 In2 In3 In4 In5Plot characteristic
100 No_load1 0 No_load In1 In2 In3 Neg current Mux Mux Waktu Goto Vm*cos(u[1]+2*pi/3) Fcn2 Vm*cos(u[1]-2*pi/3) Fcn1 Vm*cos(u[1]) Fcn Daxis 50 Damping coefficient2 Clock In1 ADC -- + + -+ + + -r q
v
r dv
s dv
s qv
sh qv
extr
atau bernilai nol. Oleh sebab itu urutan hubungan flux stator dan rotor menjadi seperti Persamaan 8, 9 berikut:
𝑞𝑑𝑠 = 𝐋𝑠𝑠𝑞𝑑𝐢𝑞𝑑𝑠 + 𝐋𝑠𝑟𝑞𝑑𝐢𝑞𝑑𝑟 (8) = [𝐿11 𝑠𝑠 𝐿𝑠𝑠12 𝐿21𝑠𝑠 𝐿22𝑠𝑠] [ 𝑖𝑞𝑠 𝑖𝑞𝑠] + [ 𝐿11 𝑠𝑟 𝐿𝑠𝑟12 𝐿21𝑠𝑟 𝐿22𝑠𝑟] [ 𝑖𝑞𝑟 𝑖𝑞𝑟] 𝑞𝑑𝑟 = 𝐋𝑟𝑠𝑞𝑑𝐢𝑞𝑑𝑠 + 𝐋𝑟𝑟𝑞𝑑𝐢𝑞𝑑𝑟 (9) = [𝐿𝑟𝑟11 𝐿12𝑟𝑟 𝐿𝑟𝑟21 𝐿𝑟𝑟22] [ 𝑖𝑞𝑠 𝑖𝑞𝑠] + [ 𝐿11 𝑟𝑟 0 0 𝐿𝑟𝑟22] [ 𝑖𝑞𝑟 𝑖𝑞𝑟] Jadi [ 𝑞𝑠 𝑑𝑠 𝑞𝑟 𝑑𝑟] = [ 𝐿11 𝑠𝑠 𝐿12𝑠𝑠 𝐿𝑠𝑠21 𝐿𝑠𝑠22 𝐿11 𝑠𝑟 𝐿12𝑠𝑟 𝐿21𝑠𝑟 𝐿22𝑠𝑟 𝐿11 𝑟𝑟 𝐿𝑟𝑟12 𝐿𝑟𝑟21 𝐿𝑟𝑟22 𝐿𝑟𝑟11 0 0 𝐿𝑟𝑟22][ 𝑖𝑞𝑠 𝑖𝑞𝑠 𝑖𝑞𝑟 𝑖𝑞𝑟] (10)
Persamaan q axis rotor yang dihubung singkat. Terdapat penambahan tegangan hubung singkat (v𝑞𝑠ℎ ) di fasa q-axis
stator yang kemudian dimasukkan ke dalam persamaan 11. Dari penambahan tersebut kemudian didapatkan model matematika untuk tegangan di stator pada fasa q dalam keadaan terhubung singkat sebagai berikut:
v𝑞𝑠 = v𝑞𝑠ℎ+ 𝑝𝑞 𝑠 + r𝑞𝑠 i𝑞𝑠 (11) dimana v𝑞𝑠ℎ= 𝑝𝑞 𝑠ℎ− r𝑞𝑠ℎi𝑞𝑠ℎ r𝑞𝑑0𝑠 [ 𝑟11𝑠 𝑟12𝑠 𝑟13𝑠 𝑟21𝑠 𝑟22𝑠 𝑟23𝑠 𝑟31𝑠 𝑟32𝑠 𝑟33𝑠 ] (12) Dari persamaan 11 didapatkan fluks q-axis stator
adalah: 𝑝𝑞 𝑠 = v 𝑞𝑠− v𝑞𝑠ℎ− r11𝑠 i𝑞𝑠− r12𝑠 i𝑑𝑠 (13) Maka 𝑞 𝑠 = ∫(𝐯 𝑞𝑠− 𝐯𝑞𝑠ℎ− r11𝒔 i𝒒𝒔− r12𝒔 i𝑑𝒔) 𝑑𝑡 (14)
Blok simulasi q-axis dan d-axis merupakan rangkaian simulasi fasa qd0. Output pada blok simulasi, q-axis, d-axis, dan zero sequence merupakan input pada blok model transformasi qd0 ke abc. Sedangkan input blok simulasi q-axis dan d-axis merupakan output dari blok model transformasi abc ke qd0.
IV. SIMULASIDANANALISIS
Pada tugas akhir ini dilakukan simulasi motor induksi tiga fasa yang akan ditransformasikan ke dua fasa, dan dilihat arus urutan negatif, positif, dan nolnya pada saat kondisi steady state. Pemodelan motor induksi dua fasa yang digunakan adalah pemodelan qd0 stationary reference frame yang ditunjukkan pada Gambar 2, dimana nilai dari = 0. Kemudian motor tersebut akan diberikan gangguan yang berbeda-beda untuk menciptakan kondisi unbalance. Maka akan dianalisa hasil outputnya yang berupa arus urutan positif, arus urutan negatif, dan arus urutan nol.
Kemudian diberikan empat macam kondisi motor induksi tiga fasa pada simulasi di Gambar 2 antara lain:
1. Motor induksi dihubung singkatkan antar belitan pada fasa A dengan impedansi nol dan dengan variasi impedansi.
2. Motor seimbang dengan pembebanan
3. Diberikan sumber yang tidak seimbang pada fasa A 4. Diberi jumlah belitan yang tidak seimbang di fasa A
C A
B
a
z
Gambar. 3. Kondisi saat terjadi hubung singkat di fasa A TABEL 1.
ARUS URUTAN POSITIF,NEGATIF,NOL SAAT HUBUNG SINGKAT PADA FASA A DENGAN IMPEDANSI 0 Hubung Singkat (belitan) ARUS URUTAN NEGATIF (A) Arus Urutan Positif (A) Arus Urutan Nol 0 5.92x10-05 2.50 1.71x10-09 1 4.18x10-02 2.54 1.67x10-09 2 8.40x10-02 2.55 4.80x10-13 3 1.24x10-01 2.56 2.50x10-09 4 1.67x10-01 2.56 1.75x10-09 5 2.12x10-01 2.57 1.80x10-09 10 4.31x10-01 2.66 5.11x10-09 15 6.52x10-01 2.68 2.98x10-09 20 8.85x10-01 2.75 1.60x10-09 25 1.13 2.84 2.90x10-09 30 1.38 2.90 8.75x10-10 40 1.93 3.12 9.58x10-09 50 2.50 3.41 2.55x10-09 60 3.11 3.67 3.21x10-10 80 4.44 4.68 2.19x10-09 100 5.96 5.42 2.78x10-09 120 7.53 6.67 2.60x10-09 140 9.40 8.06 1.27x10-10 150 9.91 9.88 1.58x10-10 200 1.67 1.68 1.98x10-09 252 1.75 1.85 1.06x10-09
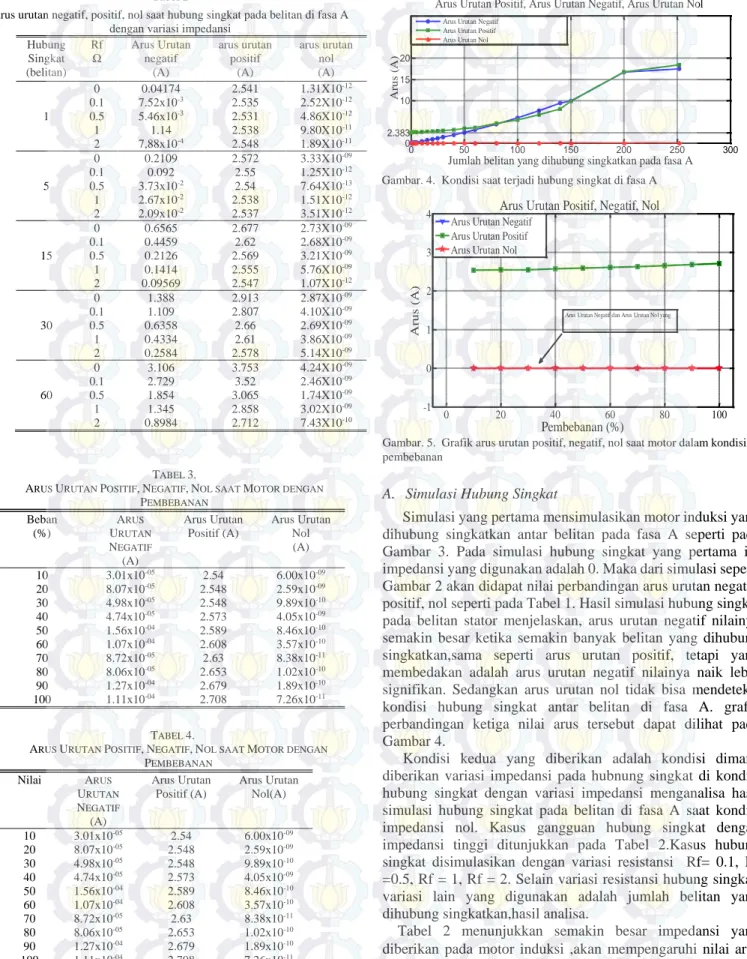
A. Simulasi Hubung Singkat
Simulasi yang pertama mensimulasikan motor induksi yang dihubung singkatkan antar belitan pada fasa A seperti pada Gambar 3. Pada simulasi hubung singkat yang pertama ini impedansi yang digunakan adalah 0. Maka dari simulasi seperti Gambar 2 akan didapat nilai perbandingan arus urutan negatif, positif, nol seperti pada Tabel 1. Hasil simulasi hubung singkat pada belitan stator menjelaskan, arus urutan negatif nilainya semakin besar ketika semakin banyak belitan yang dihubung singkatkan,sama seperti arus urutan positif, tetapi yang membedakan adalah arus urutan negatif nilainya naik lebih signifikan. Sedangkan arus urutan nol tidak bisa mendeteksi kondisi hubung singkat antar belitan di fasa A. grafik perbandingan ketiga nilai arus tersebut dapat dilihat pada Gambar 4.
Kondisi kedua yang diberikan adalah kondisi dimana diberikan variasi impedansi pada hubnung singkat di kondisi hubung singkat dengan variasi impedansi menganalisa hasil simulasi hubung singkat pada belitan di fasa A saat kondisi impedansi nol. Kasus gangguan hubung singkat dengan impedansi tinggi ditunjukkan pada Tabel 2.Kasus hubung singkat disimulasikan dengan variasi resistansi Rf= 0.1, Rf =0.5, Rf = 1, Rf = 2. Selain variasi resistansi hubung singkat, variasi lain yang digunakan adalah jumlah belitan yang dihubung singkatkan,hasil analisa.
Tabel 2 menunjukkan semakin besar impedansi yang diberikan pada motor induksi ,akan mempengaruhi nilai arus urutan negatif. Nilai arus urutan negatif berubah dengan signifikan ketika impedansi hubung singkat berubah, walaupun untuk
Gambar. 4. Kondisi saat terjadi hubung singkat di fasa A
0 50 100 150 200 250 300 0 2.383 10 15 20
Jumlah belitan yang dihubung singkatkan pada fasa A
Ar
us
(
A)
Arus Urutan Positif, Arus Urutan Negatif, Arus Urutan Nol
Arus Urutan Negatif Arus Urutan Positif Arus Urutan Nol
Gambar. 5. Grafik arus urutan positif, negatif, nol saat motor dalam kondisi pembebanan 0 20 40 60 80 100 -1 0 1 2 3 4 Pembebanan (%) Ar us ( A)
Arus Urutan Positif, Negatif, Nol
Arus Urutan Negatif Arus Urutan Positif Arus Urutan Nol
Arus Urutan Negatif dan Arus Urutan Nol yang
Tabel 2
Arus urutan negatif, positif, nol saat hubung singkat pada belitan di fasa A dengan variasi impedansi
Hubung Singkat (belitan)
Rf
Ω Arus Urutan negatif (A) arus urutan positif (A) arus urutan nol (A) 0 0.04174 2.541 1.31X10-12 0.1 7.52x10-3 2.535 2.52X10-12 1 0.5 5.46x10-3 2.531 4.86X10-12 1 1.14 2.538 9.80X10-11 2 7,88x10-4 2.548 1.89X10-11 0 0.2109 2.572 3.33X10-09 0.1 0.092 2.55 1.25X10-12 5 0.5 3.73x10-2 2.54 7.64X10-13 1 2.67x10-2 2.538 1.51X10-12 2 2.09x10-2 2.537 3.51X10-12 0 0.6565 2.677 2.73X10-09 0.1 0.4459 2.62 2.68X10-09 15 0.5 0.2126 2.569 3.21X10-09 1 0.1414 2.555 5.76X10-09 2 0.09569 2.547 1.07X10-12 0 1.388 2.913 2.87X10-09 0.1 1.109 2.807 4.10X10-09 30 0.5 0.6358 2.66 2.69X10-09 1 0.4334 2.61 3.86X10-09 2 0.2584 2.578 5.14X10-09 0 3.106 3.753 4.24X10-09 0.1 2.729 3.52 2.46X10-09 60 0.5 1.854 3.065 1.74X10-09 1 1.345 2.858 3.02X10-09 2 0.8984 2.712 7.43X10-10 TABEL 3.
ARUS URUTAN POSITIF,NEGATIF,NOL SAAT MOTOR DENGAN PEMBEBANAN Beban (%) ARUS URUTAN NEGATIF (A) Arus Urutan Positif (A) Arus Urutan Nol (A) 10 3.01x10-05 2.54 6.00x10-09 20 8.07x10-05 2.548 2.59x10-09 30 4.98x10-05 2.548 9.89x10-10 40 4.74x10-05 2.573 4.05x10-09 50 1.56x10-04 2.589 8.46x10-10 60 1.07x10-04 2.608 3.57x10-10 70 8.72x10-05 2.63 8.38x10-11 80 8.06x10-05 2.653 1.02x10-10 90 1.27x10-04 2.679 1.89x10-10 100 1.11x10-04 2.708 7.26x10-11 TABEL 4.
ARUS URUTAN POSITIF,NEGATIF,NOL SAAT MOTOR DENGAN PEMBEBANAN Nilai ARUS URUTAN NEGATIF (A) Arus Urutan Positif (A) Arus Urutan Nol(A) 10 3.01x10-05 2.54 6.00x10-09 20 8.07x10-05 2.548 2.59x10-09 30 4.98x10-05 2.548 9.89x10-10 40 4.74x10-05 2.573 4.05x10-09 50 1.56x10-04 2.589 8.46x10-10 60 1.07x10-04 2.608 3.57x10-10 70 8.72x10-05 2.63 8.38x10-11 80 8.06x10-05 2.653 1.02x10-10 90 1.27x10-04 2.679 1.89x10-10 100 1.11x10-04 2.708 7.26x10-11
gangguan hubung singkat satu belitan. Sedangkan nilai arus urutan positif tidak berubah secara signifikan ketika impedansi hubung singkat dinaikkan, khususnya dalam kasus hubung singkat belitan yang sedikit yaitu (1, 5,dan 15 belitan). Untuk jumlah hubung singkat belitan yang besar (30 dan 60), perubahan pada arus urutan positif cukup siginifikan, tetapi tidak sesignifikan perubahan pada arus urutan negatif. Sedangkan untuk arus urutan nol disimpulkan tidak terpengaruh oleh faktor impedansi hubung singkat maupun jumlah belitan.
B. Kondisi motor dengan pembebanan yang berbeda Dalam simulasi ini, rotor pada motor induksi diberikan pembebanan dengan kondisi 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, dan 100%. Seperti halnya motor yang rotornya dihubungkan dengan motor lain maka akan dilihat kondisi dari arus urutan negatif, arus urutan positif, dan arus urutan nol pada motor tersebut. Hasil yang diperoleh dapat dilihat pada Tabel 3,tabel tersebut menjelaskan arus urutan negatif dan arus urutan nol tidak bisa mendeteksi kondisi berbeban pada motor. Sedangkan arus urutan positif menunjukkan nilai yang semakin besar mengikuti besarnya pembebanan pada motor induksi yang semakin besar. Hasil analisa dari Tabel 4 dapat ditunjukkan dalam Gambar 5
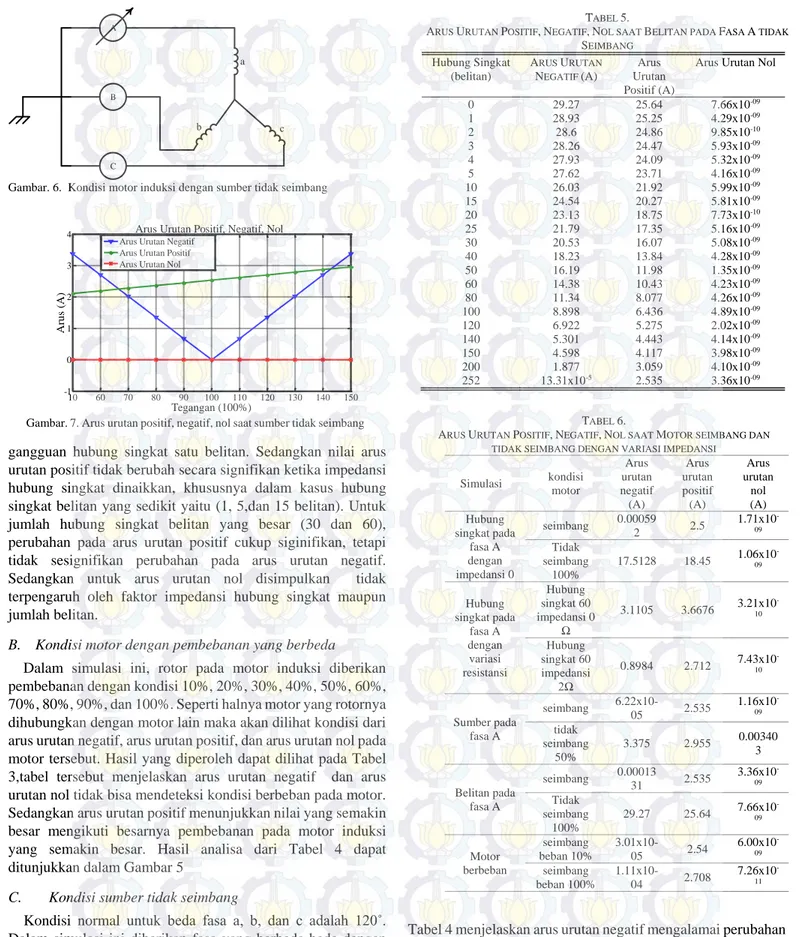
C. Kondisi sumber tidak seimbang
Kondisi normal untuk beda fasa a, b, dan c adalah 120˚. Dalam simulasi ini diberikan fasa yang berbeda-beda dengan mengubah sumber pada fase a, dimulai dari 10% dari fasa yang lainnya hingga 150%. kondisi ini ditunjukkan pada rangkaian pada Gambar 6. Dari percobaan motor yang diberikan sumber tidak seimbang pada fasa A akan didapat tabel seperti Tabel 4.
Tabel 4 menjelaskan arus urutan negatif mengalamai perubahan nilai yang signifikan ketika kondisi sumber tidak seimbang berbeda dengan arus urutan positif yang selalu naik mengikuti perubahan nilai sumber yang semakin besar.. Analisa dari tabel diatas dapat dilihat dari Gambar 7.
C A
B
a
Gambar. 6. Kondisi motor induksi dengan sumber tidak seimbang
Gambar. 7. Arus urutan positif, negatif, nol saat sumber tidak seimbang
10 60 70 80 90 100 110 120 130 140 150 -1 0 1 2 3 4 Tegangan (100%) Ar us ( A)
Arus Urutan Positif, Negatif, Nol Arus Urutan Negatif
Arus Urutan Positif Arus Urutan Nol
TABEL 5.
ARUS URUTAN POSITIF,NEGATIF,NOL SAAT BELITAN PADA FASA A TIDAK SEIMBANG Hubung Singkat (belitan) ARUS URUTAN NEGATIF (A) Arus Urutan Positif (A)
Arus Urutan Nol
0 29.27 25.64 7.66x10-09 1 28.93 25.25 4.29x10-09 2 28.6 24.86 9.85x10-10 3 28.26 24.47 5.93x10-09 4 27.93 24.09 5.32x10-09 5 27.62 23.71 4.16x10-09 10 26.03 21.92 5.99x10-09 15 24.54 20.27 5.81x10-09 20 23.13 18.75 7.73x10-10 25 21.79 17.35 5.16x10-09 30 20.53 16.07 5.08x10-09 40 18.23 13.84 4.28x10-09 50 16.19 11.98 1.35x10-09 60 14.38 10.43 4.23x10-09 80 11.34 8.077 4.26x10-09 100 8.898 6.436 4.89x10-09 120 6.922 5.275 2.02x10-09 140 5.301 4.443 4.14x10-09 150 4.598 4.117 3.98x10-09 200 1.877 3.059 4.10x10-09 252 13.31x10-5 2.535 3.36x10-09 TABEL 6.
ARUS URUTAN POSITIF,NEGATIF,NOL SAAT MOTOR SEIMBANG DAN TIDAK SEIMBANG DENGAN VARIASI IMPEDANSI
Simulasi kondisi motor Arus urutan negatif (A) Arus urutan positif (A) Arus urutan nol (A) Hubung singkat pada fasa A dengan impedansi 0 seimbang 0.00059 2 2.5 1.71x10 -09 Tidak seimbang 100% 17.5128 18.45 1.06x10 -09 Hubung singkat pada fasa A dengan variasi resistansi Hubung singkat 60 impedansi 0 Ω 3.1105 3.6676 3.21x10 -10 Hubung singkat 60 impedansi 2Ω 0.8984 2.712 7.43x10 -10 Sumber pada fasa A seimbang 6.22x10-05 2.535 1.16x10 -09 tidak seimbang 50% 3.375 2.955 0.00340 3 Belitan pada fasa A seimbang 0.00013 31 2.535 3.36x10 -09 Tidak seimbang 100% 29.27 25.64 7.66x10 -09 Motor berbeban seimbang beban 10% 3.01x10-05 2.54 6.00x10 -09 seimbang beban 100% 1.11x10-04 2.708 7.26x10 -11
D Kondisi belitan tidak seimbang
Kondisi belitan tidak seimbang adalah kondisi dimana jumlah belitan di fasa A berbeda dengan fasa B dan C.Sehingga menyebabkan motor induksi ini tidak seimbang. Kondisi ini digambarkan pada Gambar 8. kondisi belitan tidak seimbang di fasa A. Sedangkan arus urutan positif juga terpengaruh walupun tidak sesignifikan arus urutan negatif, dan dapat dilihat arus urutan nol tetap menunjukakan nilai nol. Hasil analisa pada tabel diatas dapat ditunjukkan dalam Gambar 9. Dari kelima percobaan diatas maka akan didapat tabel kesimpulan seperti Tabel 6.
V. KESIMPULAN
Berdasarkan hasil simulasi dan analisa yang telah dilakukan dapat disimpulkan bahwa arus urutan negative bisa mendeteksi kondisi tidak seimbang karena hubung singkat pada motor induksi dengan sangat baik, baik kondisi impedani nol ataupun sengan impedansi tinggi. Tetapi kelemahan arus urutan negative adalah masih terpengaruh oleh kondisi sumber dan belitan yang tidak seimbang. Sedangkan arus urutan positif tidak bisa mendeteksi kondisi hubung singkat pada motor indusksi karena arus urutan positif masih sangat terpengaruh dengan kondisi motor yang berbaban, walaupun motor tersebut dalam kondisi seimbang. Sedangkan Arus urutan nol dalam simulasi akan selalu memiliki nilai nol.
DAFTARPUSTAKA
[1] Zuhal, Dasar Tenaga Listrik, Penerbit ITB, Bandung, 1991..
[2] Parekh, R., “AC Induction Motors Fundamentals, AN887”, Microchip Technology Inc, 2003H. Poor, An Introduction to Signal Detection and
Estimation. New York: Springer-Verlag (1985) Ch. 4.
[3] Ong, Chee-Mun, “Dynamic Simulation of Electric Machinery using MATLAB Simulink”, Prentice Hall PTR, 1998, ISBN 013-723785-5.
[4] M. Arkan, D. Kostic-Perovic, P. J. Unsworth, “Modelling and Simulation of Induction Motors with Inter-turn Faults for Diagnostic”, Elsevier, 2005..
[5] S. A. Nasar, “Handbook of Electric Machines”, New York: Mc Graw Hill, Chapter 3 dan 4, 1987Y. Yorozu, M. Hirano, K. Oka, and Y. Tagawa, “Studi elektron spektroskopi pada media optik-pembesar dan antarmuka substrat plastik (gaya jurnal terjemahan),” IEEE Transl. J. Magn.Jpn., Vol. 2 (1987
a
Nb =Nc
Na= Nb
Gambar. 8. Kondisi belitan tidak seimbang pada fasa A
Gambar. 9. Arus urutan positif, negatif nol saat belitan di fasa A tidak seimbang 0 50 100 150 200 250 300 0 5 10 15 20 25 30 Belitan di fasa A Ar us
Arus Urutan Positif, Negatif, Nol Arus Urutan Negatif Arus Urutan Positif Arus Urutan Nol