Pengantar
Pengantar
Gambaran
Gambaran
Umum
Umum
Pokok
Pokok
Bahasan
Bahasan
Bab ini akan membawa Anda untuk
Bab ini akan membawa Anda untuk
mempelajari
respon
sistem
dalam
mempelajari
respon
sistem
dalam
berbagai orde. Respon terhadap sitem
berbagai orde. Respon terhadap sitem
orde satu, sistem orde dua dan sistem
orde satu, sistem orde dua dan sistem
orde tinggi. Juga kita akan mempelajari
orde tinggi. Juga kita akan mempelajari
indek kinerja dinamika sistem dengan
indek kinerja dinamika sistem dengan
parameter; waktu tunda, waktu naik,
parameter; waktu tunda, waktu naik,
waktu puncak, waktu turun, maksimum
waktu puncak, waktu turun, maksimum
overshoot
overshoot . Analisa dinamika sistem
. Analisa dinamika sistem
dilakukan dalam keadaan tunak (tidak
dilakukan dalam keadaan tunak (tidak
berubah terhadap waktu). Respon sistem
berubah terhadap waktu). Respon sistem
dianalisis berdasarkan sinyal uji berupa
dianalisis berdasarkan sinyal uji berupa
step,ramp dan sinyal sinusoidal. Pada
step,ramp dan sinyal sinusoidal. Pada
akhir bab ini akan dibahas bagaimana
akhir bab ini akan dibahas bagaimana
mengurangi error keadaan tunak dengan
mengurangi error keadaan tunak dengan
merancang
kompesator.
Sepanjang
merancang
kompesator.
Sepanjang
pembahasan,
Anda
akan
diberikan
pembahasan,
Anda
akan
diberikan
contoh-contoh dalam menyelesaikan
contoh-contoh dalam menyelesaikan
masalah dengan menggunakan program
masalah dengan menggunakan program
MATLAB. Sedangkan untuk memperkuat
MATLAB. Sedangkan untuk memperkuat
pemahaman telah disediakan beberapa
pemahaman telah disediakan beberapa
soal asesmen, sebagai umpan balik
soal asesmen, sebagai umpan balik
pencapaian belajar Anda.
pencapaian belajar Anda.
1.
1. Karakteristik Sistem
Karakteristik Sistem
2.
2. Sinyal uji
Sinyal uji
3.
3. Karakteristik Respon Sistem
Karakteristik Respon Sistem
Orde Satu,
Orde Satu,
4.
4. Karakteristik Respon Sistem
Karakteristik Respon Sistem
Orde Dua,
Orde Dua,
5.
5. Karakteristik Respon Sistem
Karakteristik Respon Sistem
Orde Tinggi,
Orde Tinggi,
6.
6. Analisis Kestabilan Routh
Analisis Kestabilan Routh
Tujuan Pembelajaran
Tujuan Pembelajaran
1.
1. Mampu membandingkan respon dinamika sistem orde satu, orde dua dan
Mampu membandingkan respon dinamika sistem orde satu, orde dua dan
orde tinggi,
orde tinggi,
2.
2. Mampu menjelaskan respon dinamika sistem dengan masukan sinyal uji
Mampu menjelaskan respon dinamika sistem dengan masukan sinyal uji
step, ramp dan sinusoidal.
step, ramp dan sinusoidal.
3.
3. Mampu membedakan karakteristik respon sistem orde satu, orde dua dan
Mampu membedakan karakteristik respon sistem orde satu, orde dua dan
orde tinggi,
orde tinggi,
4.
4. Mampu menjelaskan perbedaan antara respon sistem ranah waktu dan
Mampu menjelaskan perbedaan antara respon sistem ranah waktu dan
ranah frekuensi,
ranah frekuensi,
5.
5. Meningkatkan kepekaan terhadap cirri-ciri respon sistem orde satu, orde
Meningkatkan kepekaan terhadap cirri-ciri respon sistem orde satu, orde
dua dan orde tinggi, terhadap sinyal uji step, ramp dan sinusoidal.
dua dan orde tinggi, terhadap sinyal uji step, ramp dan sinusoidal.
3 RESPON SISTEM DINAMIK
3 RESPON SISTEM DINAMIK
Karakteristik suatu sistem, merupakan hal yang penting bagi seorang perancang pengendali. Karakteristik suatu sistem, merupakan hal yang penting bagi seorang perancang pengendali. Karakteristik sistem dapat diperoleh dengan cara memberikan berbagai sinyal uji, yaitu sinyal uji: Karakteristik sistem dapat diperoleh dengan cara memberikan berbagai sinyal uji, yaitu sinyal uji: step, impuls, ramp, sinusoidal. Karakteristik sistem dapat dibedakan ke dalam karakteristik sistem step, impuls, ramp, sinusoidal. Karakteristik sistem dapat dibedakan ke dalam karakteristik sistem open loop dan sistem close loop.
open loop dan sistem close loop.
Performansi dalam domain waktu sistem loop tertutup sangat penting bagi perancangan sistem Performansi dalam domain waktu sistem loop tertutup sangat penting bagi perancangan sistem pengendalia
pengendalian. n. Performansi sistem Performansi sistem dinamika dinamika dalam domadalam domain in waktu dapwaktu dapat at didefinididefinisikan sesikan sebagaibagai respon waktu dengan inputan sinyal uji tertentu. Secara umum sinyal uji yang digunakan adalah respon waktu dengan inputan sinyal uji tertentu. Secara umum sinyal uji yang digunakan adalah fungsi step, karena jika renspon dari uji step ini dapat diketahui, maka secara matematis dapat fungsi step, karena jika renspon dari uji step ini dapat diketahui, maka secara matematis dapat dilakukan perhitungan terhadap sinyal uji yang lain.
dilakukan perhitungan terhadap sinyal uji yang lain.
Selain respon waktu, dapat pula diperoleh respon dalam domain frekuensi. Dimana respon Selain respon waktu, dapat pula diperoleh respon dalam domain frekuensi. Dimana respon frekuensi dari suatu sistem didefinisikan sebagai respon pada kondisi steady terhadap masukan frekuensi dari suatu sistem didefinisikan sebagai respon pada kondisi steady terhadap masukan sinyal uji berupa fungsi sinusoidal.
sinyal uji berupa fungsi sinusoidal.
Sinyal uji masukan yang digunakan untuk mengetahui respon sistem adalah beberapa sinyal Sinyal uji masukan yang digunakan untuk mengetahui respon sistem adalah beberapa sinyal yang khas, diantaranya adalah : fungsi step, fungsi ramp (tangga), fungsi percepatan, fungsi impuls, yang khas, diantaranya adalah : fungsi step, fungsi ramp (tangga), fungsi percepatan, fungsi impuls, fungsi sinusoidal dan sebagainya. Dengan menggunakan sinyal uji dapat dapat digunakan untuk fungsi sinusoidal dan sebagainya. Dengan menggunakan sinyal uji dapat dapat digunakan untuk analisa matematik dan secara eksperimen dari sistem pengendalian yang dirancang.
analisa matematik dan secara eksperimen dari sistem pengendalian yang dirancang.
Pernyataan matematis hubungan antara masukan terhadap keluaran atau dikatakan sebagai Pernyataan matematis hubungan antara masukan terhadap keluaran atau dikatakan sebagai fungsi alih G(s)= C(s)/R(s), dengan R(s) adalah masukan dan C(s) adalah keluaran. Dalam fungsi alih G(s)= C(s)/R(s), dengan R(s) adalah masukan dan C(s) adalah keluaran. Dalam memperoleh keluaran dari sistem tergantung pada sinyal masukan R(s). Untuk beberapa tipe sinyal memperoleh keluaran dari sistem tergantung pada sinyal masukan R(s). Untuk beberapa tipe sinyal masukan
masukan bentuk dari R(s) bentuk dari R(s) seperti pada tabel di bawah seperti pada tabel di bawah ini.ini. Tabel 3.1
Tabel 3.1 Beberapa sinyal Beberapa sinyal ujiuji No
No Sinyal Sinyal Uji Uji R(s)R(s) 1 1 Impulse Impulse 11 2 Step 2 Step
s
s
1
1
3 Ramp 3 Ramp1
1
22s
s
4 Sinusoidal 4 Sinusoidal 22 22
s
s
3.1 Respon Sistem Orde Satu.
3.1 Respon Sistem Orde Satu.
Karakteristik suatu sistem, merupakan hal yang penting bagi seorang perancang pengendali. Karakteristik suatu sistem, merupakan hal yang penting bagi seorang perancang pengendali. Karakteristik sistem dapat diperoleh dengan cara memberikan berbagai sinyal uji, yaitu sinyal uji: Karakteristik sistem dapat diperoleh dengan cara memberikan berbagai sinyal uji, yaitu sinyal uji: step, impuls, ramp, sinusoidal. Karakteristik sistem dapat dibedakan ke dalam karakteristik sistem step, impuls, ramp, sinusoidal. Karakteristik sistem dapat dibedakan ke dalam karakteristik sistem open loop dan sistem close loop.
open loop dan sistem close loop.
Performansi dalam domain waktu sistem loop tertutup sangat penting bagi perancangan sistem Performansi dalam domain waktu sistem loop tertutup sangat penting bagi perancangan sistem pengendalia
pengendalian. n. Performansi sistem Performansi sistem dinamika dinamika dalam domadalam domain in waktu dapwaktu dapat at didefinididefinisikan sesikan sebagaibagai respon waktu dengan inputan sinyal uji tertentu. Secara umum sinyal uji yang digunakan adalah respon waktu dengan inputan sinyal uji tertentu. Secara umum sinyal uji yang digunakan adalah fungsi step, karena jika renspon dari uji step ini dapat diketahui, maka secara matematis dapat fungsi step, karena jika renspon dari uji step ini dapat diketahui, maka secara matematis dapat dilakukan perhitungan terhadap sinyal uji yang lain.
dilakukan perhitungan terhadap sinyal uji yang lain.
Selain respon waktu, dapat pula diperoleh respon dalam domain frekuensi. Dimana respon Selain respon waktu, dapat pula diperoleh respon dalam domain frekuensi. Dimana respon frekuensi dari suatu sistem didefinisikan sebagai respon pada kondisi steady terhadap masukan frekuensi dari suatu sistem didefinisikan sebagai respon pada kondisi steady terhadap masukan sinyal uji berupa fungsi sinusoidal.
sinyal uji berupa fungsi sinusoidal.
Sinyal uji masukan yang digunakan untuk mengetahui respon sistem adalah beberapa sinyal Sinyal uji masukan yang digunakan untuk mengetahui respon sistem adalah beberapa sinyal yang khas, diantaranya adalah : fungsi step, fungsi ramp (tangga), fungsi percepatan, fungsi impuls, yang khas, diantaranya adalah : fungsi step, fungsi ramp (tangga), fungsi percepatan, fungsi impuls, fungsi sinusoidal dan sebagainya. Dengan menggunakan sinyal uji dapat dapat digunakan untuk fungsi sinusoidal dan sebagainya. Dengan menggunakan sinyal uji dapat dapat digunakan untuk analisa matematik dan secara eksperimen dari sistem pengendalian yang dirancang.
analisa matematik dan secara eksperimen dari sistem pengendalian yang dirancang.
Pernyataan matematis hubungan antara masukan terhadap keluaran atau dikatakan sebagai Pernyataan matematis hubungan antara masukan terhadap keluaran atau dikatakan sebagai fungsi alih G(s)= C(s)/R(s), dengan R(s) adalah masukan dan C(s) adalah keluaran. Dalam fungsi alih G(s)= C(s)/R(s), dengan R(s) adalah masukan dan C(s) adalah keluaran. Dalam memperoleh keluaran dari sistem tergantung pada sinyal masukan R(s). Untuk beberapa tipe sinyal memperoleh keluaran dari sistem tergantung pada sinyal masukan R(s). Untuk beberapa tipe sinyal masukan
masukan bentuk dari R(s) bentuk dari R(s) seperti pada tabel di bawah seperti pada tabel di bawah ini.ini. Tabel 3.1
Tabel 3.1 Beberapa sinyal Beberapa sinyal ujiuji No
No Sinyal Sinyal Uji Uji R(s)R(s) 1 1 Impulse Impulse 11 2 Step 2 Step
s
s
1
1
3 Ramp 3 Ramp1
1
22s
s
4 Sinusoidal 4 Sinusoidal 22 22
s
s
3.1 Respon Sistem Orde Satu.
3.1 Respon Sistem Orde Satu.
Dari model matematis sebuah sistem, orde dari suatu sistem dapat dilihat dari besar pangkat Dari model matematis sebuah sistem, orde dari suatu sistem dapat dilihat dari besar pangkat varibel
mempunyai variabel
mempunyai variabel ss dengan pangkat tertinggi satu. Bentuk fisisnya bisa berupa rangkaian listrik dengan pangkat tertinggi satu. Bentuk fisisnya bisa berupa rangkaian listrik RC
RC , sistem termal, atau sistem lainnya. Model sistem orde satu secara matematis dapat dituliskan, sistem termal, atau sistem lainnya. Model sistem orde satu secara matematis dapat dituliskan sebagai berikut, sebagai berikut,
1
1
1
1
))
((
))
((
Ts
Ts
s
s
R
R
s
s
C
C
…( …(3.1)3.1)Dengan T : konstanta waktu sistem orde satu Dengan T : konstanta waktu sistem orde satu
Respon dari sistem dengan masukan sinyal tangga satuan (
Respon dari sistem dengan masukan sinyal tangga satuan (stepstep), dalam bentuk transformasi Laplace), dalam bentuk transformasi Laplace R
R((ss)=1/s, sehingga persamaan 3.1 menjadi,)=1/s, sehingga persamaan 3.1 menjadi,
s
s
Ts
Ts
s
s
C
C
1
1
1
1
1
1
))
((
…(3.2)…(3.2)Dengan menguraikan C(s) pada persamaan (3.2) menjadi pecahan persial diperoleh, Dengan menguraikan C(s) pada persamaan (3.2) menjadi pecahan persial diperoleh,
1
1
1
1
))
((
Ts
Ts
T
T
s
s
s
s
C
C
... (3.3)... (3.3)dengan transformasi Laplace balik, persamaan (3.3) sebagai berikut, dengan transformasi Laplace balik, persamaan (3.3) sebagai berikut,
))
0
0
((
1
1
))
((
t t
ee
//t t
cc
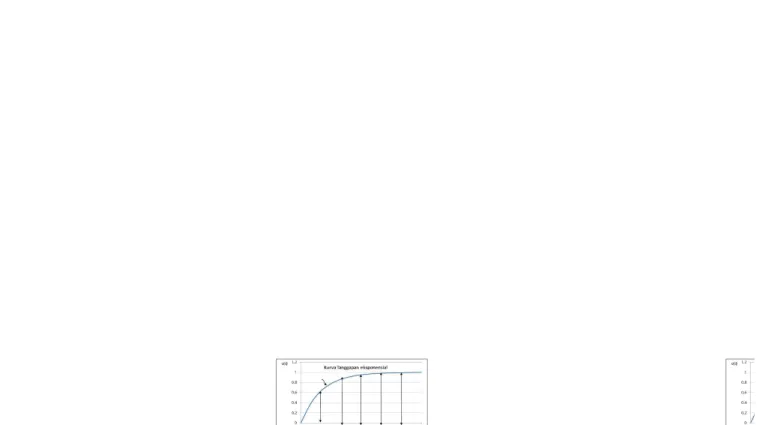
t t T T …(3.4)…(3.4) KeluaranKeluaran cc((t t ) mula-mula nol kemudian akhirnya menjadi satu. Salah satu karakteristik penting dari) mula-mula nol kemudian akhirnya menjadi satu. Salah satu karakteristik penting dari kurva tanggapan eksponensial
kurva tanggapan eksponensial cc((t t ) tersebut adalah pada saat) tersebut adalah pada saat t t ==T T (periode) harga (periode) harga cc((t t ) adalah 0,632) adalah 0,632 (63,2 % dari perubahan totalnya). Hal ini dapat diperhatikan dari Gambar 3.1 di bawah,
Gambar 3.1 Kurva tanggapan eksponensial.
Tabel 3.2 Nilai respon sistem orde 1
Sedangkan tanggapan
sistem orde satu dengan masukan sinyal landai (ramp), dapat menimbulkan terjadinya kesalahan keadaan tunak. Kesalahan keadaan tunak makin kecil, jika T juga makin kecil.
t (T) c(t) % t (T) c(t) % t (T) c(t) % 0 0 5,5 99,59132 10,5 99,99725 0,5 39,34693 6 99,75212 11 99,99833 1 63,21206 6,5 99,84966 11,5 99,99899 1,5 77,68698 7 99,90881 12 99,99939 2 86,46647 7,5 99,94469 12,5 99,99963 2,5 91,7915 8 99,96645 13 99,99977 3 95,02129 8,5 99,97965 13,5 99,99986 3,5 96,98026 9 99,98766 14 99,99992 4 98,16844 9,5 99,99251 14,5 99,99995 4,5 98,8891 10 99,99546 15 99,99997 5 99,32621 T T T T T T 63,2% 86,5% 95,0% 98,2% 99,3% c(t)=1 – e-t/T
Contoh Soal 3.1 :
Gambar di bawah sebelah kiri adalah sebuah control valve, berfungsi mengatur aliran fluida sesuai dengan setting yang dikehendaki. Sedangkan gambar sebelah kanan menunjukkan skema dari control valve dengan katup diafragma pneumatik. Pada kedudukan tetap tekanan pengendalian dari pengendali adalah
P
c, tekanan dalam katub jugaP
c, dan perpindahan batang katup adalahX
. Anggap bahwa pada saat t =0 tekanan pengendalian diubah dariP
c menjadiP
c+ pc. Kemudiantekanan katup akan dirubah dari
P
c menjadiP
c+ pv . Perubahan dalam tekanan katup pv akanmenyebabkan perpindahan batang katup berubah dari
X
menjadiX
+ x . Dapatkan fungsi alih antara perubahan perpindahan batang katup x dan perubahan tekanan pengendalian pc.Gambar 3.2 Control Valve dengan katup diafragma pneumatik.
Jawab :
Dipilih laju arus udara dalam katup diafragma adalah q dengan tahanan R. jadi,
R
p
p
q
c
v
danR
p
p
dt
dp
C
q
v
c
v Dari dua persamaan diatas diperoleh persamaan diferensial sistem,c v v
p
p
dt
dp
RC
... (3.5)Sedangkan, c
p
x
dt
dx
RC
A
k
... (3.7) Maka fungsi alih dengan keluaran x dan masukan pc adalah,1
/
)
(
)
(
RCs
k
A
s
P
s
X
c ... (3.8)Fungsi alih pada persamaan (3.8) di atas adalah sistem ber orde-1, menggambarkan perpindahan batang katup, terhadap tekanan pengendali.
Latihan Soal 3.1 : Dari contoh soal 3.1,
(a) Buat blok diagram sistem pengendalian.
(b) Jika diketahui A/k =10 dan RC =25, cari tanggapan tangga satuan ( pc) sistem x (t ) dan buat
kurva tanggapan tangga satuan dengan menggunakan program MATLAB.
Respon sistem orde satu dengan sinyal uji Impulse
Sebuah sistem orde satu , dengan masukan fungsi impulse saat kondisi awal adalah nol, response dari sinyal uji ini dikatakan sebagai Response impulse dari G(s) atau sama dengan respon dari step sG(s). Response impulse dari sistem berikut ini :
1
1
)
(
)
(
)
(
s
s
G
s
R
s
C
Karena R(s) = 1, maka diperoleh :
1 1 ) ( ) (
s s G s CUntuk mengetahui respon impulse dari sistem orde satu, dapat digunakan bantuan program MATLAB sebagai berikut,
%unit impulse - response num=[ 1 0];
den = [1 1];
step(num,den), grid
title('Impulse response satuan dari G(s) = 1/(s+1)')
Gambar 3.3 Respon unit impulse untuk sistem orde satu
3.2 Respon Sistem Orde Dua.
Sistem orde dua mempunyai fungsi alih dengan pangkat s tertinggi dua. Biasanya dinyatakan dengan rasio redaman , frekuensi alami tak teredam n, yang dinyatakan dalam bentuk fungsi alih
sebagai berikut, 2 2 2
2
)
(
)
(
n n ns
s
s
R
s
C
…(3.8)Blok diagram sistem sebagai berikut,
Gambar 3.4 Sistem orde dua.
Perilaku dinamika sistem orde dua dapat digambarkan dalam suku dua parameter dan n. Jika
0< <1, maka loop tertutup merupakan konjugat kompleks dan berada pada setengah sebelah kiri bidang s. Dalam hal ini sistem dikatakan dalam keadaan teredam, dan tanggapan transien berosilasi.
R (s) + E (s) C (s)
-Jika =1, maka sistem dikatakan dalam keadaan teredam kritis. Sedangkan >1 sistem atas redaman (overdamped).
Keadaan Teredam (0<<1): Fungsi alihnya dapat dituliskan,
)
)(
(
)
(
)
(
2 d n d n nj
s
j
s
s
R
s
C
…(3.9)dimana
d
n1
2 disebut frekuensi alami teredam, dengan masukan sinyal tangga satuan (step), keluaran sistem adalah,2 2 2
)
(
)
(
1
)
(
d n n n ns
s
s
s
s
C
…(3.10)transformasi Laplace balik dari persamaan (3.10) diperoleh,
)
0
(
1
tan
1
1
)
(
2 1 2
t
t
Sin
e
t
c
d t n
…(3.11)dari persamaan (3.11) dapat dilihat bahwa frekuensi osilasi transien adalah frekuensi osilasi teredam d dan bervariasi terhadap rasio redaman . Sinyal kesalahan sistem yang merupakan
selisih antara sinyal masuk dan sinyal keluar dituliskan,
)
0
(
1
tan
1
)
(
)
(
)
(
2 1 2
t
t
Sin
e
t
c
t
r
t
e
d t n
…(3.12)Sinyal kesalahan ini menunjukan osilasi sinusoida teredam. Pada keadaan tunak t =, tidak terdapat kesalahan antara masukan dan keluaran.
Apabila ratio redaman =0, tanggapan menjadi tak teredam dan berosilasi terus-menerus untuk waktu yang tak tentu.
Keadaan Teredam Kritis ( = 1) :
Dengan masukan sinyal tangga satuan, tanggapan sistem C (s) dituliskan,
s
s
s
C
n n 2 2)
(
)
(
…(3.13)Transformasi Laplace balik dari persamaan (3.13) adalah,
)
0
(
)
1
(
1
)
(
t
e
t
t
c
nt
n …(3.14)Pada keadaan tunak t =, tidak terdapat kesalahan antara masukan dan keluaran dan tidak terjadi osilasi.
Keadaan Atas Redaman (overdamped ) ( > 1) :
Dengan masukan sinyal tangga satuan, tanggapan sistem C (s) dituliskan,
s
s
s
s
C
n n n n n1
1
)
(
2 2 2
...(3.15)Transformasi Laplace dari persamaan (3.15) adalah,
)
0
(
1
2
1
)
(
2 1 2 2 1
t
s
e
s
e
t
c
t s t s n
…(3.16) dimana
n ns
s
1
1
2 2 2 1
Jadi tanggapan c(t ) meliputi dua suku eksponensial.
Dari persamaan (3.16) tanggapan sistem akibat pengaruh –s1 jauh lebih kecil daripada –s2, hal ini
disebabkan suku yang mengandung s1, meluruh jauh lebih cepat dari yang lainnya.
Perhatikan gambar berikut, tanggapan sistem c(t) sebagai fungsi nt untuk beberapa harga rasio
Gambar 3.5 Kurva tanggapan tangga satuan untuk sistem pada persamaan 3.16.
Karakteristik Kinerja Sistem.
Karakteristik kinerja suatu sitem pengendalian dicirikan oleh tanggapan transien terhadap masukan sinyal uji tangga satuan (step). Jika tanggapan terhadap masukan sinyal uji tangga satuan diketahui, maka secara matematis dapat dihitung tanggapan untuk sembarang masukan. Tanggapan transien suatu sistem pengendalian secara praktis selalu menunjukan osilasi teredam sebelum mencapai keadaan tunaknya.
Indek kinerja dari suatu sistem pengendalian adalah sebagai berikut :
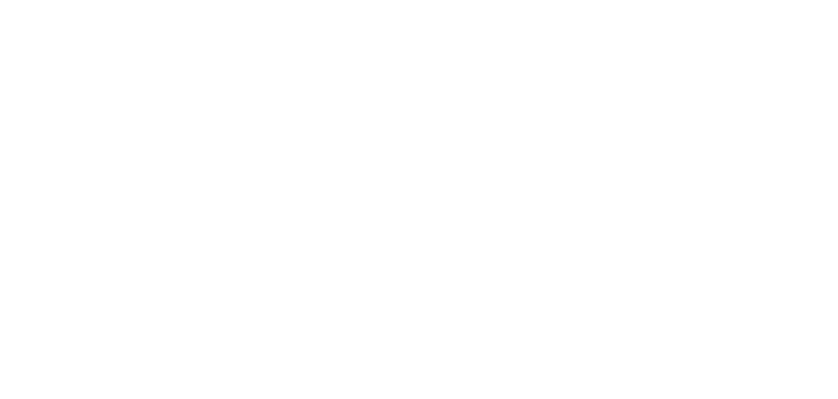
1. Waktu tunda (delay time) t d : adalah waktu yang diperlukan oleh tanggapan untuk mencapai
setengah (50%) nilai akhir untuk waktu yang pertama.
2. Waktu naik (rise time) t r : adalah waktu yang diperlukan oleh tanggapan untuk naik dari 10%
menjadi 90%, 5% menjadi 95% atau 0% menjadi 100% dari nilai akhir yang digunakan. Untuk sistem atas redaman (overdamped) waktu naik yang biasa digunakan 10% menjadi 90%.
3. Waktu puncak ( peak time) t p : adalah waktu yang diperlukan tanggapan untuk mecapai puncak
4. Maksimum (persen) overshoot (M p) : adalah nilai puncak kurva tanggapan diukur dari satuan.
Apabial nilai akhir keadaan tunak tanggapannya jauh dari satu, maka biasa digunakan persen overshoot maksimum, dan didefinisikan oleh,
%
100
x
)
(
)
(
)
(
overshoot
(persen)
Maksimum
c
c
t
c
p5. Waktu Turun (settling time) t s : waktu yang diperlukan untuk tanggapan tangga satuan masuk
daerah kreteria 2% atau 5% dari nilai akhir.
Untuk melengkapi penjelasan perhatikan gambar berikut,
Gambar 3.6 Kurva tanggapan tangga satuan dengan indek kinerja : t d , t r , t p, M p.
Contoh Soal 3.2 :
Respon Impulse dari sistem orde dua Perhatikan sistem orde dua dibawah ini :
1
2
,
0
1
)
(
)
(
)
(
2
s
s
s
G
s
R
s
C
Untuk masukan impulse , R(s) = 1, diperoleh persamaan kelauaran :
s
s
s
s
s
C
.
1
1
2
,
0
)
(
2
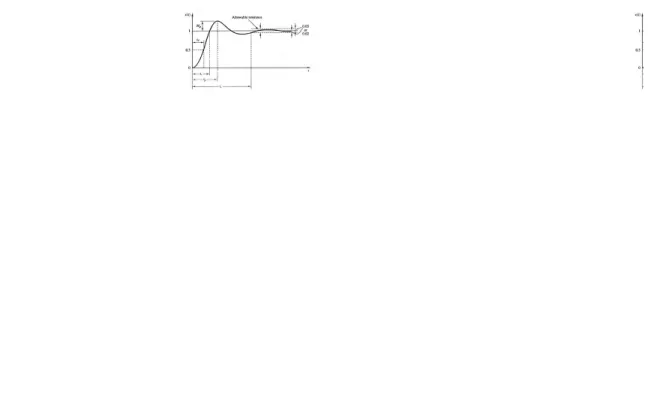
Perhatikan bentuk persamaan tersebut diatas, bila digunakan bantuan program Matlab, untuk mendapatkan respon sistem orde dua dengan masukan impulse, dengan program yang dinyatakan dalam bentuk tabel di bawah ini.
%unit impulse - response sistem orde dua num=[ 0 1 0];
den = [1 0.2 1]; step(num,den), grid
title('Impulse response satuan dari G(s) = 1/(s^2+0,2s+1)')
Gambar 3.7 Respon impulse dari sistem orde dua
Response Ramp dari sistem orde dua
Perhatikan sistem orde dua yang dinyatakan dalam bentuk fungsi alih di bawah ini :
1
1
)
(
)
(
2
s
s
s
R
s
C
Dengan masukan fungsi ramp, R(s) = 1/s2, maka diperoleh persamaan keluaran :
s
s
s
s
s
s
s
C
2 3 21
1
.
1
1
)
(
Persamaan di atas dapat dituliskan kembali dalam bentuk :
s
s
s
s
s
C
.
1
1
1
)
(
2
Dari persamaan tersebut diatas, bahwa respon ramp dapat diperoleh dari respon fungsi step dengan mengalikan faktor s pada polinomial penyebutnya.
Untuk mengetahui respon sistem orde dua dengan masukan fungsi ramp, dengan bantuan program Matlab, seperti terlihat pada tabel berikut dan keluarannya seperti terlihat pada Gambar 3.8.
%respon sistem orde dua dengan masukan unit ramp - response sistem orde dua num=[ 0 0 0 1]; den = [1 1 1 0]; t=0:0.05:10; c= step(num,den,t); plot(t,c,t,t); grid,
title('Ramp response dari G(s) = 1/(s^2+s+1)'), xlabel('waktu -detik'), ylabel('output c(t)')
Gambar 3.8 Keluaran renspon sistem orde dua dengan masukan fungsi ramp.
Untuk menganalisa berbagai sistem dengan masukan ramp satuan, perhatikan tiga buah sistem yang digambarkan dalam blok diagarm dibawah ini.
Gambar 3.9 Blok diagram 3 sistem untuk contoh soal 3.2
Fungsi alih dari ketiga sistem : Sistem 1
1
2
,
0
1
)
(
)
(
2 1
s
s
s
R
s
C
Sistem 21
1
8
,
0
)
(
)
(
2 2
s
s
s
s
R
s
C
Sistem 31
1
)
(
)
(
2 3
s
s
s
R
s
C
Untuk ketiga sistem tersebut di atas, akan dibandingkan keluarannya, dengan menggunakan bantuan program MATLAB.
R(s) E(s) C(s) 5
Sistem 1
R(s) E(s) C(s) 5(1+0,8s)Sistem 2
R(s) E(s) C(s) 5Sistem 3
1+0,8s + + +-%respon tiga sistem dengan masukan unit ramp num1=[0 0 0 1]; den1= [1 0,2 1 0]; num2= [0 0 0,8 1]; den2 = [1 1 1 0]; num3= [0 0 0 1]; den3 = [ 1 1 1 0]; t=0:0.05:20; c1= step(num1,den1,t); c2= step(num2,den2,t); c3= step(num3,den3,t); plot(t,c1,'.',t,c2,'x',t,c3,'--',t,t); grid,
title('Ramp response untuk 3 buah sistem yang berbeda '), xlabel('waktu - detik'), ylabel('output c(t)')
Gambar 3.10 Hasil keluaran program untuk contoh soal 3.2
Terlihat pada gambar di atas, sistem 2 dan sistem 3 cenderung menghasilkan respon dengan ess – eror steady state yang tetap sepanjang waktu. Ess dari sistem 2 lebih besar dibandingkan dengan sistem 3. Pada sistem 1 , keluaran sistem selalu berfluktuasi dan cenderung membesar dengan kenaikan waktu. Bentuk sistem seperti ini tidak stabil.
Contoh Soal 3.3 :
Suatu sistem orde-2, dengan rasio redaman =0,6 dan frekuensi alami tak teredam n=5 seperti pada
gambar berikut,
R(s) C(s)
Cari indek kinerja dan gambar kurva tanggapan tangga satuan sistem di atas. Jawab :
Untuk menjawab, digunakan program MATLAB, untuk membuat kurva tanggapan tangga satuan sistem dan program M-file timespec(num,den) untuk menghitung indek kinerja sistem sebagai berikut :
num=25; den=[1 6 25]; t=0:0.02:2;
c=step(num,den,t);plot(t,c),
xlabel('t - det'), ylabel('c(t)'),grid,pause timespec(num,den)
Gambar 3.11 Kurva tanggapan tangga satuan sistem.
0 0.5 1 1.5 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 t - det c ( t ) 2 2 2
2
n n ns
s
Indek kinerja sistem :
Peak time = 0.786667 Settling time = 1.18667 Rise time = 0.373333 Percent overshoot = 9.47783
Latihan Soal 3.2 :
Suatu sistem orde-2, seperti pada gambar berikut,
Cari indek kinerja dan gambar kurva tanggapan tangga satuan sistem diatas.
Contoh Soal 3.4 :
Sistem servomekanis seperti pada blok diagram di bawah. Tentukan harga d dan e sehingga tanggapan tangga satuan mempunyai overshoot maksimum 40 % dan waktu puncak 0,8 detik.
Jawab :
Maksimum overshoot diperoleh dengan rumus,
100
x
2 1 /
e
M
p …(3.17)atau jika dinyatakan secara eksplisit untuk rasio redaman diperoleh rumus,
2 2
100
100
p pM
Log
M
Log
…(3.18)Frekuensi alami tak teredam diperoleh dengan persamaan,
2
1
p nt
…(3.19) R(s) C(s) R(s) + -C(s)Waktu turun t s didefinisikan sebagai berikut,
5%)
(kriteria
3
3
2%)
(kriteria
4
4
n s n sT
t
T
t
…(3.20)Dengan menggunakan persamaan (3,17) dan (3.18), diperoleh =0,28 dan n=4,0906.
Dari blok diagram di atas diperoleh fungsi alih dari sistem,
d
s
de
s
d
s
R
s
C
)
1
(
)
(
)
(
2Berdasarkan persamaan (3.17), diperoleh persamaan karakteristik sebagai berikut,
2 2 2
2
)
1
(
de
s
d
s
ns
ns
sehingga diperoleh :d
n2
(
4
.
0906
)
2
16
,
733
de + 1 = 2(0,28)(4,0906) atau e = 0,077 Program MATLAB :Dengan menggunakan program MATLAB sebagai berikut,
os = 40; tmax=.80;
z= log(100/os)/sqrt( pi^2 +(log(100/os))^2 ) % From Eq.(3.18)
wn = pi/(tmax*sqrt(1-z^2)) % From Eq.(3.19)
num = wn^2;
den =[1 2*z*wn wn^2]; t=0:0.02:4;
c = step(num, den, t); plot(t, c),
title('Kurva tanggapan tangga satuan sistem') xlabel('t - det. '), ylabel('c(t)'), grid, pause timespec(num, den)
Gambar 3.12 Kurva tanggapan tangga satuan sistem.
Hasil keluaran program sebagai berikut, rasio redaman
z = 0.2800
frekuensi alami tak teredam n = 4.0906
Indek kinerja sistem :
Peak time = 0.803239 Percent overshoot = 39.9965 Rise time = 0.314311 Settling time = 3.37011
Latihan Soal 3.3 :
Sistem yang dinyatakan seperti pada blok diagram dibawah. Diketahui =0,6 dan n=5 rad/det.
R(s) E(s) C(s) + -0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.5 1
1.5 Kurva tanggapan tangga satuan sistem
t - det.
c ( t )
Hitung waktu naik t r , waktu puncak t p, waktu turun t s, dan persen maksimum overshoot M p (lengkapi
jawaban dengan menggunakan program MATLAB) dan gambarkan kurva tanggapan tangga satuan sistem.
Contoh Soal 3.5
Dengan menggunakan program Matlab, hasilkan respon step dari karakteristik dalam domain waktu untuk sistem yang dinyatakan dalam blok diagram berikut ini, dimana nilai ωn = 5, dan =0,6
Gambar 3.13 Hasil keluaran program Matlab untuk contoh soal 3.5
Contoh Soal 3.6 :
Dengan menggunakan program Matlab, hasilkan respon step dari karakteristik dalam domain waktu untuk sistem yang dinyatakan dalam blok diagram berikut ini, dimana nilai ωn = 5, dan =0,2;0,4;
0,6 ; 0,8; 1.
%file example bab 3.6
psi1=0.2; psi2=0.4; psi3=0.6; psi4=0.8;psi5=1; wn=5;
a21=2*psi1*wn; a22=2*psi2*wn; a23=2*psi3*wn; a24=2*psi4*wn; a25=2*psi5*wn;
num = 25;
den1 = [1 a21 25]; den2 = [1 a22 25]; den3 = [1 a23 25]; den4 = [1 a24 25]; den5 = [1 a25 25];
t = 0:0.05:5;
c1=step(num,den1,t); c2=step(num,den2,t); c3=step(num,den3,t); c4=step(num,den4,t); c5=step(num,den5,t);
plot(t,c1,t,c2,t,c3,t,c4,t,c5),
xlabel('t - detik'); ylabel('c(t)'), title('Respon step sistem orde dua dengan wn konstan dan psi variabel');grid,
Gambar 3.14 Hasil keluaran program Matlab untuk contoh soal 3.6
Terlihat pada Gambar 3.6 dengan berbagai nilai menghasilkan respon yang berbeda. Dengan kenaikan nilai terjadi kenaikan overshoot, saat = 0,2 dan 0,4 tidak terjadi overshoot, respon sistem seperti ini dikatakan sebgai sistem orde satu. Sedangkan pada saat = 0,6; 0,8 dan 1
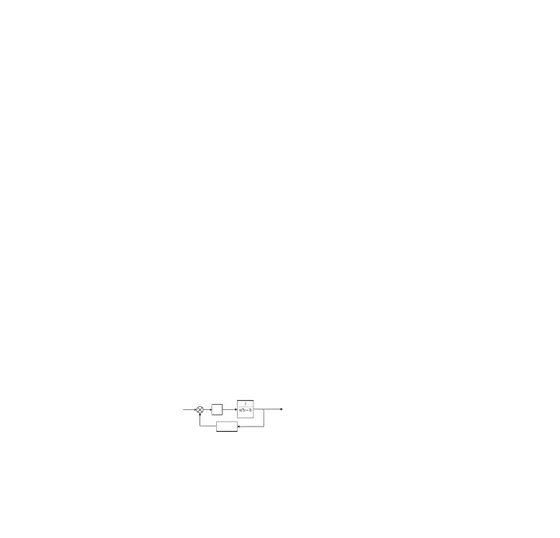
Perhatikan sistem pengendalian Proporsional pada blok diagram gambar di bawah ini. Pada sistem ini pengendali proporsional mengontrol posisi dengan gangguan torsi N. Bila sistem mempunyai momen inersia J dan gesekan viskous b, analisalah hasil respon dengan menggunakan bantuan Matlab, untuk kondisi saat Kp = 1 dan Kp = 4.
Jawab :
Asumsi bahwa referensi dari masukan R(s) = 0, fungsi alih dari C(s) dengan N(s) adalah :
p K bs Js s N s C
2 1 ) ( ) ( Dan pK
bs
Js
s
N
s
C
s
N
s
E
21
)
(
)
(
)
(
)
(
Eror steady state ess terhadap gangguan torsi N fungsi step dengan besaran Tn adalah :
p n n p t t ss
K
T
s
T
K
bs
Js
s
s
sE
e
.
lim
)
(
lim
2 0 0Besarnya eror steady state dapat dikurangi dengan cara menaikkan nilai gain Kp, tetapi dengan kenaikan Kp juga akan menyebabkan pada respon muncul osilasi. Misalkan dalam kasus ini dbuat dua kondisi dengan Kp = 1 dan Kp = 4.
Kasus I. Kp = 1, J = 1 dan b = 0,5
1
5
,
0
1
)
(
)
(
2
s
s
s
N
s
C
Kasus I. Kp = 4, J = 1 dan b = 0,54
5
,
0
1
)
(
)
(
2
s
s
s
N
s
C
Kp N + + +-Untuk Kasus 1 num1 = [0 0 1] den1 = [1 0.5 1] Untuk Kasus 2 Num2 = [0 0 1] Den2 = [1 0.5 4]
Dengan menggunakan program Matlab, untuk contoh soal tersebut di atas :
num1 = [0 0 1]; den1 = [1 0.5 1]; num2 = [ 0 0 1]; den2 = [1 0.5 4]; t = 0:0.05:20, c1=step(num1,den1,t); c2=step(num2,den2,t); plot(t,c1,t,c2),
xlabel('t - detik'); ylabel('c(t)'), title('Respon step untuk dua sistem dengan Kp = 1 dan Kp = 4');grid,
3.3 Respon Sistem Orde Tinggi.
Pembahasan sistem orde tinggi, hanya dipusatkan pada sistem orde-3. Dibicarakan tanggapan tangga satuan yang umum diterapkan pada sistem orde-3 yang fungsi alih loop tertutupnya adalah,
)
1
0
(
)
)(
2
(
)
(
)
(
2 2 2
p
s
s
s
p
s
R
s
C
n n n …(3.21)Tanggapan tangga satuan dari sistem ini dapat diperoleh sebagai berikut,
)
0
(
1
)
2
(
1
1
]
1
)
2
(
[
1
)
2
(
1
)
2
(
1
)
(
2 2 2 2 2 2 2
t
e
t
Sin
t
Cos
e
t
c
pt n n t n
…(3.22) dengan, np
…(3.23) Perhatikan bahwa
2(
2
)
1
2(
1
)
2
(
1
2)
0
Maka koefisien dari suku e-pt selalu negatif.
Perhatikan Gambar 3.7 di bawah, menunjukan kurva tanggapan tangga satuan sistem orde-3 untuk berbagai harga rasio dengan =0,5.
Akibat dari kutub real s = - p pada tanggapan tangga satuan akan menurunkan overshoot maksimum dan mempertinggi waktu turun.
Gambar 3.16 Kurva tanggapan tangga satuan sistem orde tiga.
Contoh Soal 3.8 :
Sistem yang dinyatakan dengan fungsi alih sebagai berikut,
)
25
6
)(
16
,
0
1
(
)
4
,
0
1
(
25
)
(
)
(
2
s
s
s
s
s
R
s
C
Gambarkan kurva tanggapan tangga satuan dan juga hitung idek kinerja sistem dengan menggunakan program MATLAB.
Jawab :
Bedasarkan fungsi alih diatas, program MATLAB disusun sebagai berikut,
num = [10, 25];
den = [0.16 1.96 10 25]; t=0:0.02:2;
c = step(num, den, t); plot(t, c),
title('Tanggapan tangga satuan sistem orde-3') xlabel('t - det. '), ylabel('c(t)'), grid, pause timespec(num, den)
Indek kinerja sistem,
Peak time = 0.553333 Percent overshoot = 37.9675
Rise time = 0.206667 Settling time = 1.59
Kurva hasil keluaran program, seperti tampak pada Gambar 3.8 di bawah.
Gambar 3.17 Kurva tanggapan tangga satuan sistem.
Latihan Soal 3.4 :
Dari contoh soal 3.8. cari indek kinerja sistem ( peak time, rise time, settling time, dan percen overshoot ) dengan menggunakan persamaan (3.17 – 3.20) dan (3.21 – 3.23) jika mungkin.
3.4 Kriteria Kestabilan Routh
Kriteria kestabilan Routh memberikan informasi pada kita apakah terdapat akar positif pada persamaan polinomial tanpa penyelesaian persmaan polinomial tersebut. Apabila kriteria ini diterapkan untuk suatu sistem pengendalian, informasi tentang kestabilan mutlak dapat diperoleh secara langsung dari koefisien persamaan karakteristik.
Prosedure dalam menentukan kriteria kestabilan Routh adalah sebagai berikut :
(1). Tulis persamaan polinomial dalam bidangs sebagai berikut,
0
1 1 1
n n n n os
a
s
a
s
a
a
…(3-1)dengan koefisien ai merupakan besaran real. Anggap bahwa an0 sehingga terdapat akar nol
yang dihilangkan.
(2). Apabila terdapat koefisien nol atau negatif maka koefisien positif terkecil adalah akar imajiner yang mempunyai bagian real positif, dalam hal ini sistem tidak stabil .
0 0.5 1 1.5 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
Tanggapan tangga satuan sistem orde-3
t - det.
c ( t )
(3). Jika semua koefisien positif, susun koefisien polinomial dalam baris kolom sesuai pola berikut, 1 0 1 1 2 1 2 4 3 2 1 4 4 3 2 1 3 4 3 2 1 2 7 5 3 1 1 6 4 2 0
g
s
f
s
e
e
s
d
d
d
d
s
c
c
c
c
s
b
b
b
b
s
a
a
a
a
s
a
a
a
a
s
n n n n n …(3-2) dimana, 1 7 0 6 1 3 1 5 0 4 1 2 1 3 0 2 1 1a
a
a
a
a
b
a
a
a
a
a
b
a
a
a
a
a
b
1 4 1 7 1 3 1 3 1 5 1 2 1 2 1 3 1 1b
b
a
a
b
c
b
b
a
a
b
c
b
b
a
a
b
c
1 3 1 3 1 2 1 2 1 2 1 1c
c
b
b
c
d
c
c
b
b
c
d
Proses ini diteruskan sampai baris ke-n secara lengkap.
Kriteria kestabilan Routh menyatakan bahwa jumlah akar persamaan (2) dengan bagian real positif sama dengan jumlah perubahan tanda dari koefisien kolom pertama. Harus diperhatikan bahwa nilai yang tepat pada kolom pertama tidak dipentingkan, hanya perubahan tanda yang harus diperhatikan. Syarat perlu dan syarat cukup agar sistem stabil, adalah semua koefisien pada kolom pertama mempunyai tanda positif.
Contoh Soal 3-1:
Gunakan kriteria kestabilan Routh untuk polinomial orde tiga berikut,
0
3 2 2 1 3 0s
a
s
a
s
a
a
agar semua koefisien positif.
Jawab.
3 0 3 1 3 0 2 1 1 3 1 2 2 0 3
a
s
a
a
a
a
a
a
s
a
a
s
a
a
s
Syarat agar semua koefisien pada kolom pertama menjadi positif haruslah
a
1a
2
a
0a
3, dan sistem akanstabil.
Latihan Soal 3-1:
Perhatikan persamaan polinomial berikut,
0 5 4 3 2 3 2 4
s s s sPeriksa dengan menggunakan kriteria kestabilan Routh.
(1). Apabila suku kolom pertama dalam suatu baris adalah nol, tetapi suku lainya tidak nol atau tidak terdapat suku lain maka suku nol ini diganti dengan bilangan positif yang sangat kecil agar array dapat dihitung.
Contoh Soal 3-2:
Periksa polinomial berikut dengan kriteria kestabilan Routh,
0 2 2 2 3
s
s
s Jawab :Susunan koefisiennya adalah,
2
ε0
2
2
1
1
0 1 2 3s
s
s
s
apabila tanda koefisien di atas nol () sama dengan di bawah nol, menunjukan bahwa terdapat pasangan akar imajiner.
(2). Apabila tanda koefisien diatas nol () berlawanan dengan yang dibawah menunjukan bahwa terdapat satu perubahan tanda.
Contoh Soal 3-3:
Periksa polinomial berikut dengan kriteria kestabilan Routh,
0
)
2
(
)
1
(
2
3
2 3
s
s
s
s
Keadaan Khusus.Jawab :
Susunan koefisiennya adalah,
2
-3
-2
ε0
3
1
:
perubahan
Satu tanda
:
perubahan
Satu tanda
0 ε 2 1 2 3s
s
s
s
Terdapat dua perubahan tanda koefisien dikolom pertama. Hal ini sesuai dengan hasil pemfaktoran persamaannya.
(3). Jika semua koefisien pada suatu baris adalah nol maka koefisien itu menunjukan bahwa akar-akar besaran yang sama terletak berlawanan secara radial pada bidangs, yaitu, dua akar-akar real dengan besaran yang sama dan tandanya berlawanan sehingga dua akar konjugat imajiner. Jadi jika suatu baris, mempunyai koefisien semuanya nol, maka baris diatasnya (suku banyak pembantu) digunakan untuk menggantikannya, dengan terlebih dahulu melakukan operasi turunan.
Contoh Soal 3-4:
Perhatikan polinomial berikut,
0 50 25 48 24 2 4 3 2 5
s s s s sPeriksa dengan menggunakan kriteria kestabilan Routh.
Jawab :
Susunan koefisien adalah,
0 0 50 48 2 25 24 1 3 4 5 s s s
Suku banyak pembantuP(s)
karena semua koefisien pada baris s3 nol, maka dapat menggunakan baris diatasnya (s4) sebagai suku
banyak pembantu sebagai berikut,
50
48
2
)
(
s
s
4
s
2
P
s
s
ds
s
dP
96
8
)
(
3
Susunan koefisien yang baru adalah,
0
7
,
112
50
24
96
8
50
48
2
25
24
1
1 2 3 4 5
s
s
s
s
s
Terlihat bahwa terdapat satu perubahan tanda pada kolom pertama pada array baru. Jadi, persamaan asal mempunyai satu akar dengan bagian real positif. Dengan menyelesaikan akar-akar suku banyak pembantu, 0 50 48 2 s4
s2
atau s = 1, dan s = j 5dua pasang akar-akar merupakan bagian dari akar-akar persamaan asal. Sebagai bukti bahwa persamaan asal dapat ditulis dalam bentuk faktor berikut,
0 ) 2 )( 5 )( 5 )( 1 )( 1 ( s
s
s
j s
j s
Jelas persamaan asal mempunyai satu akar dengan bagian real positif. Latihan Soal 3-2
Periksa kondisi kestabilan persamaan polinomial berikut,
a). s4
10 s3
35 s2
50s
24
0b). s4
4 s3
7 s2
22s
24
0c). s4
5 s2
20s
24
0Dengan menggunakan kriteria kestabilan Routh. Latihan Soal 3-3:
Perhatikan fungsi alih berikut,
K
s
s
s
s
K
s
R
s
C
)
2
)(
1
(
)
(
)
(
2Dengan menggunakan kriteria k estabilan Routh, cari hargaK agar sistem stabil.
3.5 Analisis Kesalahan Keadaan Tunak.
Sudah menjadi sifat fisik sistem pengendalian selalu mengalami kesalahan keadaan tunak dalam memberikan tanggapan terhadap suatu jenis masukan tertentu. Sistem mungkin tidak mempunyai kesalahan keadaan tunak untuk masukan tangga, tetapi sistem yang sama dapat menunjukkan kesalahan keadaan tunak untuk masukan landai (ramp). Satu-satunya cara untuk menghilangkan kesalahan keadaan tunak adalah dengan mengubah struktur sistem. Apakah suatu sistem akan menunjukkan kesalahan keadaan tunak atau tidak tergantung pada jenis fungsi alih loop terbuka sistem.
Fungsi alih loop tertutup dituliskan,
)
(
)
(
1
)
(
)
(
)
(
s
H
s
G
s
G
s
R
s
C
…(3.24)dan besarnya kesalahan loop tertutup sistem,
)
(
)
(
)
(
1
1
)
(
)
(
)
(
)
(
R
s
s
H
s
G
s
C
s
H
s
R
s
E
…(3.25)Kesalahan keadaan tunak dapat dinyatakan sebagai berikut,
)
(
)
(
1
)
(
lim
0G
s
H
s
s
sR
e
s ss
…(3.26)Untuk berbagai jenis masukan kesalahan keadaan tunak menjadi,
Masukan step: p s ss
K
s
H
s
G
e
1
1
)
(
)
(
lim
1
1
0 …(3.27) Masukan ramp : v s ssK
s
H
s
sG
e
1
)
(
)
(
lim
1
0
…(3.28) Masukan parabolic : a s ssK
s
H
s
G
s
e
1
)
(
)
(
lim
1
2 0
…(3.29)Untuk mendefinisikan tipe sistem, fungsi alih loop terbuka dituliskan sebagai berikut,
)
1
(
)
1
)(
1
(
)
1
(
)
1
)(
1
(
)
(
)
(
2 1s
T
s
T
s
T
s
s
T
s
T
s
T
K
s
H
s
G
p N m b a
…(3.30) G(s) H(s) R(s) + C(s)-Suatu sistem dikatakan tipe-0, tipe-1, tipe-2, ….jika N =0, N =1, N =2, …Perhatikan bahwa penggolongan ini berbeda dengan orde sistem. Jika tipe suatu sistem bertambah besar, maka ketepatannya meningkat, tetapi kestabilan sistem akan memburuk. Dalam prakteknya, agak mustahil memperoleh sistem tipe-3 atau yang lebih besar, karena pada umumnya sulit untuk merancang sistem yang stabil dengan lebih dari dua integrasi pada lintasan umpan maju.
Tabel 3.3 Kesalahan Keadaan Tunak.
N Kesalahan Keadaan Tunak
Masukan Step r (t )=1 Masukan Ramp r (t )=t Masukan Parabolik r (t )=1/2t 2 0 p
K
1
1
1 0 vK
1
2 0 0 aK
1
Contoh Soal 3.12 :Tentukan tetapan kesalahan dengan masukan step, ramp, parabolic dan kesalahan keadaan tunak berdasarkan fungsi alih sistem berikut,
)
5
)(
2
)(
1
(
)
4
(
10
)
(
s
s
s
s
s
s
G
Jawab :Dengan menggunakan program MATLAB, jawab dari soal di atas dapat dinyatakan sebagai berikut,
k=10;
z = [-4; inf; inf; inf]; p = [0; -1; -2; -5]; errorzp(z,p,k) Hasilnya adalah, Sistem type is 1 Error Constants: Kp Kv Ka Inf 4 0 Steady-state Errors:
Step Ramp Parabolic
Contoh Soal 3.13 :
Dengan menggunakan program MATLAB tentukan respon sistem dengan fungsi alih sebagai berikut
s
s
a
s
G
1
1
)
(
dengan a = - 0,01, 0 dan 0,01Gambar 3.21 Respon open loop dan close loop untuk contoh soal 3.13 dengan menggunakan program MATLAB
Contoh Perancangan Kompensator
menmperkecil eror steady state tanpa mempengaruhi performansi kondisi transien. Fungsi alih dari kompensator lag,
1
1
1
1
)
(
)
(
)
(
c c c c c c in outp
s
z
s
p
s
z
s
p
s
z
s
s
V
s
V
s
G
Dimana bentuk suku terakhir persamaan di atas merupakan pole dan zero dari kompensator lag yang berada pada sebelah kiri sumbu s.
Untuk kondisi eror steady stat e akan berkurang oleh faktor α dari kompensator lag. Ini dapat dilihat saat nilai limit dari G(s) pada saat s0.
Tahapan dalam merancang kompensator lag.
1. Hitung nilai dari eror steady state untuk sistem Gc-transien(s) Gp(s), dimana fungsi alih G c-transien(s) adalah kompensator yang dirancang untuk memenuhi spesifikasi performansi
transien.
2. Hitung rasio dari eror steady state aktual terhadap yang diharapkan. Rasio ini menjadi nilai rasio α = zc/pc.
3. Rancang kompensator :
a. Tempatkan zero dari kompensator lag ke sisi kanan dari proyeksi sumbu real pole close loop yang dominan dengan faktor 50 – 100.
b. Tempatkan kompensator ke sisi sebelah kanan dari zero dengan suatu faktor α.
4. Jika dibutuhkan, pilih resistor dan kapasitor yang cocok untuk implementasi rancangan kompensator.
Contoh untuk sistem berikut :
)
5
,
1
)(
1
)(
2
,
0
(
)
8
,
0
(
375
,
0
)
(
s
s
s
s
s
s
G
pSpesifikasi eror steady state ess =0,2
Settling time dari respon : Ts ~ 16
Overshoot dari respon : Mov ~ 20%
Spesifikasi dua respon transien dapat dinyatakan oleh kpmpensator lead :
)
6583
,
0
(
)
2
,
0
(
5192
,
1
)
(
s
s
s
G
c lead
0
,
2
1
1
,
5
8
,
0
375
,
0
.
)
6583
,
0
(
)
2
,
0
(
5192
,
1
)
(
)
(
)
(
s
s
s
s
s
s
s
s
G
s
G
s
G
c lead pGambar 3.22 Letak root locus dan response step tanpa kompensator
Tabel 3.4 Tahapan dalam perancangan kompensator Ta
hap
Phase Lag Phase Lead Lag
–
Lead1 spek ss plant ss c
e
e
K
spek ss plant ss ce
e
K
spek ss plant ss ce
e
K
2 Plot
j
,
K
G
j
)
G
K
c p
c p PlotK
cG
p
j
,
K
cG
p
j
)
Plot
j
,
K
G
j
)
G
K
c p
c p 3 Lokasiωxc :
j
G
K
c p
= 180o+PM spek +10oLokasi ωx dan hitung
PMunkompensasi Pilih ωxc 4
/20
10
K cG p j xc g
max
PMspek + 10o PMunkomp =(PMspek +10o) – (180o+
x)
p cG
j
K
max
(PMspek + 10o) -(180o+
)
c x p cG
j
K
5 g cg cg xc g cz
p
z
,
10
max
maxsin
1
sin
1
d
max
maxsin
1
sin
1
d 6 Lokasi ωxc : d xc d cz
d xc p cG
j
K
10
log
101
d cd d cz
p
7 d xc d cz
d cd d cz
p
d xc p cG j K x 10log 1 10 /2010
,
g
x 8 g cg cg xc g cz
p
z
,
10
Gambar di atas menunjukkan root locus dan respon dari sistem yang tidak terkompensasi. s1 = -0,25
+ j 0,488 akan digunakan untuk merancang kompensator lead. Dengan fungsi alih G(s) yang baru diperoleh overshoot 19,4% dan settling time 16,3 detik. Dan pole transient berada pada s = -0,25 ± j 0,488, -0,2 , -0,8285, -1,8295.
Gambar 3.23 Letak root locus dan response step dengan kompensator lead
Rangkuman :
Respon dinamika sistem orde satu mempunyai ciri bahwa bentuk fungsi eksponensial. Keadaan tunak dapat dicapai mulai dari keadaan kurang lebih 63,2 % dari capaian keadaan tunak, atau sering disebut dengan satu periode T.
Respon dinamika sistem orde dua dapat digambarkan dalam suku dua parameter dan n. Jika
0< <1, maka loop tertutup merupakan konjugat kompleks dan berada pada setengah sebelah kiri bidang s. Dalam hal ini sistem dikatakan dalam keadaan teredam, dan tanggapan transien berosilasi. Jika =1, maka sistem dikatakan dalam keadaan teredam kritis. Sedangkan >1 sistem atas redaman (overdamped).
Sedangkan respon dinamika orde tinggi difokuskan pada sistem orde-3, dimana respon sistem terhadap sinyal masukan step bergantung pada berbagai harga parameter rasio dengan . Overshoot sistem akan cenderung menurun menuju pada keadaan tunak.
Karakteristik kinerja suatu sitem pengendalian yang terpenting adalah pada saat keadaan transien. Tanggapan transien suatu sistem pengendalian secara praktis selalu menunjukan osilasi teredam sebelum mencapai keadaan tunaknya. Indek kinerja dari sistem pengendalian yang terpenting adalah ; Waktu tunda (delay time) t d , Waktu naik (rise time) t r , Waktu puncak ( peak time) t p, Waktu
Turun (settling time) t s, dan Maksimum (persen) overshoot (M p).
Pustaka utama :
1. Kuo,B.C.,” Automatic Control Sistem”,6th ed., Printice-Hall, Englewood Cliffs,NJ.,1998, halaman
361 s/d 411.
2. Ogata,K.,”Modern Control Engineering”, 4th ed., Printice-Hall, Englewood Cliff,NJ.,1997,
halaman 249 s/d 343.
Pustaka penunjang :
1. Bahram Shahian, Michael Hassul,”Control Sistems Using MATLAB”, International Editions, Printice-Hall, 1997.
2. The MathWorks, Inc.,”Control Sistem Toolbox ”, Printice-Hall, 1997.
3. Syamsul Arifin, ”Kontrol Automatik II ”, Jurusan Teknik Fisika-FTI-ITS, 2007.
Soal-Soal Asesmen :
1. Jelaskan, apa yang dimaksud dengan respon sistem dan sinyal uji?
2. Jelaskan perbedaan mendasar antara respon sistem orde satu, orde dua dan orde tinggi? 3. Seringkali kita menguji sistem dengan memperhatikan respon sistem terhadap sinyal uji,
jelaskan apa pertimbangan kita memberikan sinyal uji step, ramp, dan sinusoidal ?
4. Jelaskan masing-masing indek kinerja suatu sistem, jika masukan suatu sistem adalah sinyal uji ramp.
5. Secara sederhana Anda jelaskan apa yang dimaksud dengan root locus?
6. Dalam perancangan kompesaror, jelaskan pengertian tentang phase-lag, phase-lead , Lag
–
Lead , dan apa perbedaan ketiganya?7. Salah satu tujuan dalam proses pembuatan kertas adalah bagaimana caranya mempertahankan keluaran produksi ketika menjalani proses pengeringan dan penggulungan agar menghasilkan tebal kertas yang tetap. Bila fungsi alih dari pengendali Gc (s) dan proses G(s) adalah :