Abstrak — Paper ini membahas desain kontrol fuzzy swing-up
dan stabilisasi pendulum-kereta. Kontroler untuk swing-up menggunakan fuzzy Sugeno sedangkan kontroler stabilisasi menggunakan model fuzzy Takagi-Sugeno. Untuk kontrol stabilisasi, aturan kontroler disusun menggunakan konsep
parallel distributed compensation (PDC) dengan teknik pole placement. Sistem kontrol yang telah dirancang akan
diaplikasikan dalam bentuk laboratorium virtual di mana bentuk fisik dari sistem pendulum-kereta divisualisasikan dalam bentuk simulasi dengan tampilan grafis 3D dan antarmuka yang interaktif. Sistem kontrol ini disimulasikan menggunakan perangkat lunak MATLAB. Hasil Simulasi menunjukkan kontrol fuzzy swing-up dapat mengayunkan pendulum menuju zona stabilisasi dan kontrol stabilisasi mampu menstabilkan sudut pendulum di 0 radian juga mampu mengatasi gangguan. Untuk laboratorium virtual menunjukkan bahwa grafis 3D, sistem kontrol, dan antarmuka dapat diintegrasikan sehingga menghasilkan simulasi kontrol sistem pendulum-kereta secara real time.
Kata Kunci - Laboratorium virtual, fuzzy, swing-up, pole placement, real time, sistem pendulum-kereta.
I. PENDAHULUAN
Sistem pendulum-kereta merupakan masalah klasik dalam sistem kontrol. Sistem ini memiliki karakteristik nonlinear dan tidak stabil, sehingga seringkali digunakan untuk pengujian metode-metode kontrol. Permasalahn kontrol yang biasanya digunakan pada sistem pendulum-kereta adalah swing-up, stabilisasi dan tracking. Swing-up adalah mengayun pendulum dari posisi menggantung menuju zona stabilisasi. Selanjutnya, pendulum dipertahankan pada posisi terbaliknya yang biasa disebut stabilisasi. Untuk tracking, kereta dikontrol agar mengikuti sinyal referensi yang diberikan dengan mempertahankan pendulum pada posisi terbaliknya.
Berbagai metode kontrol telah banyak dilakukan untuk memecahkan masalah kontrol pada sistem pendulum-kereta. Untuk kontrol swing-up ada yang menggunakan metode energy based [1], metode minimum-time control [2], ada pula yang menggunakan pendekatan heuristik berupa kontrol fuzzy [3]. Pada penelitian ini dirancang sebuah kontroler untuk swing-up sistem pendulum-kereta menggunakan kontrol fuzzy Sugeno sedangkan untuk kontroler stabilisasi dipilih menggunakan model fuzzy Takagi-Sugeno (T-S). Model ini dapat merepresentasikan sistem nonlinear dengan baik. Struktur kontroler stabilisasi berdasarkan konsep parallel distributed control (PDC) dengan tenik pole placement.
Dalam beberapa tahun terakhir ini, alat pembelajaran berupa laboratorium virtual telah banyak dikembangkan [4,5]. Penelitian tersebut menggunakan berbagai jenis plant sebagai objek kontrol, seperti level proses, robot terbalik beroda empat, gantry crane, dan inverted pendulum. Tidak hanya pada bidang teknik saja, namun pada bidang lain pun aplikasi laboratorium virtual ini telah banyak dikembangkan. Pada laboratorium virtual bentuk fisik dari sistem divisualisasikan dalam simulasi, sehingga mahasiswa dapat lebih familiar dengan sistem tersebut sebelum melakukan eksperimen pada plant sebenarnya. Laboratorium virtual memiliki kelebihan yaitu rendah biaya, user friendly, dapat membantu proses pembelajaran menjadi lebih menarik, dan mendukung untuk pembelajaran individu [6].
Pada penelitian ini dirancang sebuah laboratorium virtual untuk kontrol swing-up dan stabilisasi sistem pendulum kereta. Sistem kontrol yang dirancang menggunakan kontrol fuzzy. Laboratorium virtual ini diharapkan dapat membantu mahasiswa untuk belajar serta menguji sistem pendulum-kereta menggunakan kontrol fuzzy secara real-time. Selain itu, animasi pendulum-kereta dengan grafis 3D dan antarmuka yang interaktif diharapkan dapat memberikan suatu pandangan baru dalam menyajikan sebuah simulasi.
Sistematika makalah ini adalah sebagai berikut: Bagian II membahas mengenai model matematika sistem pendulum-kereta. Dalam bagian III menjelaskan tentang kontrol fuzzy swing-up dan stabilisasi. Pada Bagian IV hasil simulasi laboratorium virtual untuk kontrol swing-up dan stabilisasi sistem pendulum-kereta. Bagian terakhir dari makalah ini memuat kesimpulan.
II. MODELMATEMATIKA SISTEM PENDULUM-KERETA
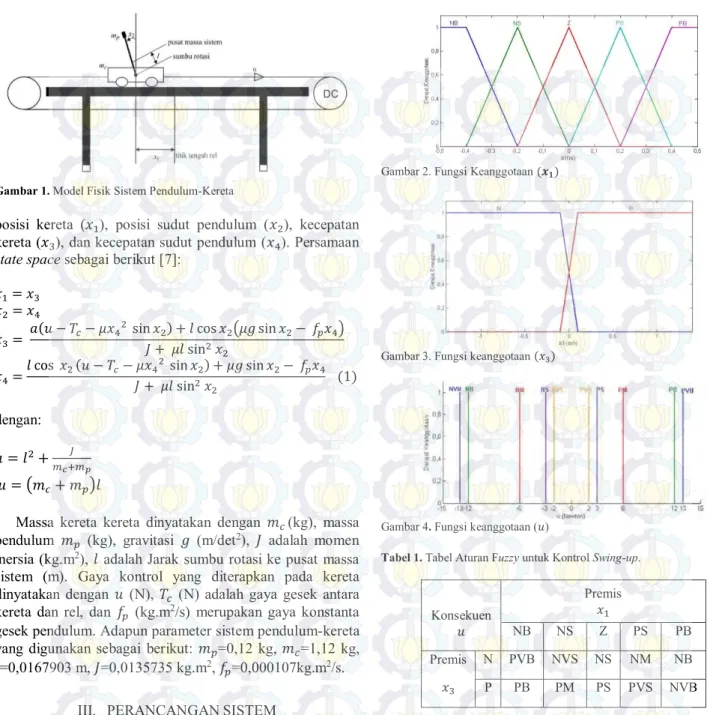
Sistem pendulum-kereta terdiri dari dua bagian yang bergerak yaitu pendulum dan kereta. Kereta hanya dapat bergerak secara horizontal sepanjang rel dengan panjang lintasan yang terbatas, sedangkan batang pendulum dapat berayun sesuai dengan sumbu rotasi yang terdapat pada sisi kereta. Untuk mengayunkan dan menyeimbangkan pendulum, kereta digerakkan ke kiri atau ke kanan rel. Kereta digerakkan oleh motor DC yang dihubungkan oleh belt. Model fisik dari sistem pendulum-kereta dapat dilihat pada Gambar 1. Sistem pendulum-kereta merupakan sistem yang memiliki satu masukan dan banyak keluaran. Masukan berupa sinyal kontrol, sedangkan keluaran berupa
Laboratorium Virtual untuk Swing-up dan
Stabilisasi Sistem Pendulum-Kereta
Menggunakan Kontrol Fuzzy
Feni Isdaryani, Trihastuti Agustinah
Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
Gambar 1. Model Fisik Sistem Pendulum-Kereta
posisi kereta (𝑥1), posisi sudut pendulum (𝑥2), kecepatan kereta (𝑥3), dan kecepatan sudut pendulum (𝑥4). Persamaan state space sebagai berikut [7]:
𝑥̇1= 𝑥3 𝑥̇2= 𝑥4 𝑥̇3= 𝑎(𝑢 − 𝑇𝑐− 𝜇𝑥4 2 sin 𝑥 2) + 𝑙 cos 𝑥2(𝜇𝑔 sin 𝑥2− 𝑓𝑝𝑥4) 𝐽 + 𝜇𝑙 sin2 𝑥 2 𝑥̇4=𝑙 cos 𝑥2(𝑢 − 𝑇𝑐− 𝜇𝑥4 2 sin 𝑥 2) + 𝜇𝑔 sin 𝑥2− 𝑓𝑝𝑥4 𝐽 + 𝜇𝑙 sin2 𝑥 2 (1) dengan: 𝑎 = 𝑙2+ 𝐽 𝑚𝑐+𝑚𝑝 𝜇 = (𝑚𝑐+ 𝑚𝑝)𝑙
Massa kereta kereta dinyatakan dengan 𝑚𝑐 (kg), massa pendulum 𝑚𝑝 (kg), gravitasi 𝑔 (m/det2), 𝐽 adalah momen
inersia (kg.m2), 𝑙 adalah Jarak sumbu rotasi ke pusat massa
sistem (m). Gaya kontrol yang diterapkan pada kereta dinyatakan dengan 𝑢 (N), 𝑇𝑐 (N) adalah gaya gesek antara kereta dan rel, dan 𝑓𝑝 (kg.m2/s) merupakan gaya konstanta
gesek pendulum. Adapun parameter sistem pendulum-kereta yang digunakan sebagai berikut: 𝑚𝑝=0,12 kg, 𝑚𝑐=1,12 kg, 𝑙=0,0167903 m, 𝐽=0,0135735 kg.m2, 𝑓𝑝=0,000107kg.m2/s.
III. PERANCANGANSISTEM A. Perancangan Kontroler Fuzzy Swing-up
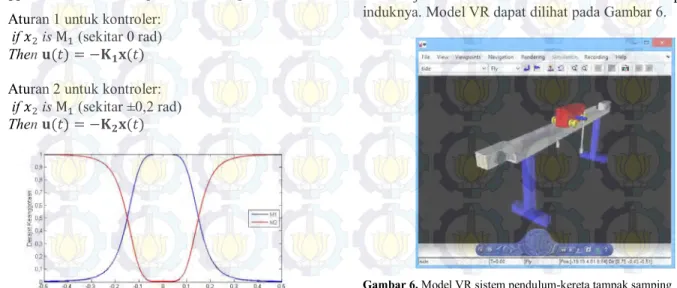
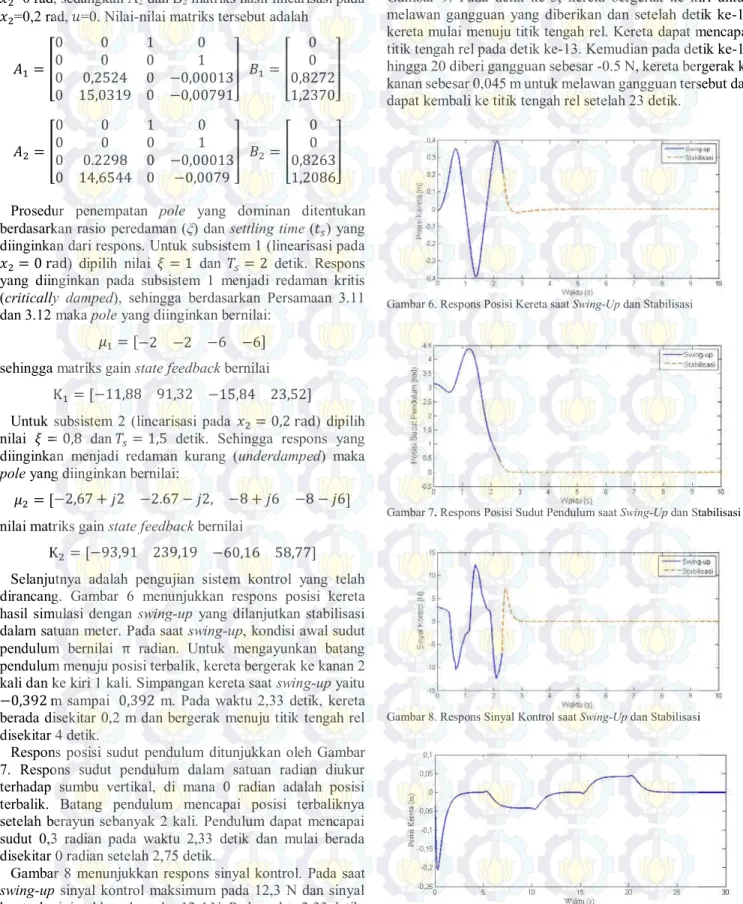
Kontrol fuzzy swing-up pada penelitian ini memiliki dua buah masukan yaitu posisi kereta (𝑥1) dan kecepatan kereta (𝑥3) sedangkan variabel keluarannya adalah aksi kontrol (𝑢). Kontrol fuzzy swing-up ini menggunakan fuzzy model Sugeno dengan dua premis dan 10 if-then rule. Variabel premis pertama (𝑥1) dibagi kedalam lima fungsi keanggotaan (seperti pada Gambar 2), yaitu Negative Big (NB), Negative Small (NS), Zero (Z), Positive Small (PS), dan Positive Big (PB). Variabel premis kedua (𝑥3) dibagi kedalam dua fungsi keanggotaan (seperti pada Gambar 3) yaitu Positive (P) yang menyatakan kereta bergerak ke kanan dan Negative (N) yang menyatakan kereta bergerak ke kiri.
Untuk aksi kontrol (𝑢) memiliki bentuk himpunan berupa fuzzy singleton yang dibagi kedalam sepuluh fungsi keanggotaan, seperti yang terlihat pada Gambar 4. Aturan fuzzy untuk kontroler fuzzy swing-up pada sistem pendulum-kereta dapat dilihat pada Tabel 1.
Gambar 2. Fungsi Keanggotaan (𝒙𝟏)
Gambar 3. Fungsi keanggotaan (𝑥3)
Gambar 4. Fungsi keanggotaan (𝑢)
Tabel 1. Tabel Aturan Fuzzy untuk Kontrol Swing-up.
Konsekuen 𝑢 Premis 𝑥1 NB NS Z PS PB Premis 𝑥3 N PVB NVS NS NM NB P PB PM PS PVS NVB
B. Perancangan Kontroler Fuzzy Stabilisasi
Kontroler untuk stabilisasi sistem pendulum-kereta menggunakan model fuzzy T-S. Model fuzzy T-S merupakan representasi dari dinamika sistem nonlinear di mana bagian konsekuen dari setiap aturan dinyatakan sebagai model linear. Tujuan utama model Takagi-Sugeno (T-S) untuk menyatakan dinamika lokal tiap-tiap aturan fuzzy dengan model sistem linear. Model sistem secara keseluruhan dicapai dengan pencampuran (blending) fuzzy dari beberapa model sistem linear.
Model fuzzy T-S dideskripsikan oleh aturan if-then yang menyatakan hubungan input-output lokal dari sistem nonlinear. Pada model fuzzy T-S, bagian premis dari aturan if-then merupakan aturan model plant yang dapat ditulis dalam bentuk sebagai berikut:
Aturan plant ke-i:
If 𝑧1(𝑡) 𝑖𝑠 𝑀𝑖1 𝐴𝑁𝐷 … 𝐴𝑁𝐷 𝑧𝑗(𝑡) 𝑖𝑠 𝑀𝑖𝑗
Then 𝐱̇(𝑡) = 𝐀𝑖𝐱(𝑡) + 𝐁𝑖𝑢(𝑡)
𝑦(𝑡) = 𝐂𝑖𝐱(𝑡) + 𝐃𝑖𝑢(𝑡) (2) 𝑖 = 1,2, … , 𝑟 𝑗 = 1,2, … , 𝑝
dengan 𝑀𝑖𝑗 adalah himpunan fuzzy, r sebagai jumlah aturan fuzzy, dan p adalah jumlah himpunan fuzzy dalam satu aturan, dengan vektor state 𝐱(𝑡) ∈ 𝑅𝑛, vektor kontrol masukan 𝑢(𝑡) ∈ 𝑅𝑚, dan vektor keluaran sistem 𝑦(𝑡) ∈ 𝑅𝑞, sedangkan 𝑧(𝑡) ∈ 𝑅𝑗 merupakan variabel pada bagian premis yang dapat berupa fungsi dari variabel state, dan gangguan eksternal. 𝐴𝑖, 𝐵𝑖, dan 𝐶𝑖 merupakan matriks state, matriks masukan dan matriks keluaran.
Model sistem keseluruhan dapat diperoleh melalui inferensi max-product dan proses defuzifikasi menggunakan metode rata-rata bobot dengan persamaan sebagai berikut:
𝐱̇(𝑡) = ∑ 𝑤𝑖(𝑧(𝑡))[𝐀𝒊𝐱(𝑡) + 𝐁𝒊𝑢(𝑡)] 𝑟 𝑖=1 𝑦(𝑡) = ∑ 𝑤𝑖(𝑧(𝑡))𝐂𝑖𝐱(𝑡) 𝑟 𝑖=1 (3) dengan 𝑤𝑖(𝑧(𝑡)) = 𝜇𝑖(𝑧(𝑡)) ∑𝑟𝑖=1𝜇𝑖(𝑧(𝑡)) ; 𝜇𝑖(𝑧(𝑡)) = ∏ 𝑀𝑖𝑗(𝑧𝑗(𝑡)) 𝑝 𝑗=1
Model fuzzy T-S yang digunakan pada penelitian ini memiliki dua buah aturan dengan satu variabel premis, yaitu sudut pendulum. Aturan yang digunakan yaitu
Aturan plant ke-1:
If 𝑥2(𝑡) is M1 (sekitar 0 rad) Then 𝐱̇(𝑡) = 𝐀𝟏𝐱(𝒕) + 𝐁𝟏𝐮(𝐭) 𝐲(𝑡) = 𝐂𝟏𝐱(𝑡)
Aturan plant ke-2:
If 𝑥2(𝑡) is M2 (sekitar + 0,2 rad) Then 𝐱̇(𝑡) = 𝐀𝟐𝐱(𝑡) + 𝐁𝟐𝐮(𝑡) 𝐲(𝑡) = 𝐂𝟐𝐱(𝑡)
di mana matriks 𝐴1, 𝐵1,𝐴2,𝐵2 merupakan matriks hasil linearisasi, sedangkan matriks 𝐶1= 𝐶2= [0 0 0 1]. Fungsi keanggotaan fuzzy pada aturan plant (seperti pada Gambar 5) adalah
𝑀1= 1
1+|0,15𝑥2|2,5 dan 𝑀2
= 1 − 𝑀1 (4) Sesuai dengan konsep PDC, di mana setiap aturan plant dikompensasi oleh aturan kontroler yang bersesuaian sehingga aturan kontroler dapat ditulis sebagai berikut:
Aturan 1 untuk kontroler: if 𝑥2 is M1 (sekitar 0 rad) Then 𝐮(𝑡) = −𝐊𝟏𝐱(𝑡) Aturan 2 untuk kontroler: if 𝑥2 is M1 (sekitar ±0,2 rad) Then 𝐮(𝑡) = −𝐊𝟐𝐱(𝑡)
Gambar 5. Fungsi keanggotaan Sudut Pendulum
Metode yang digunakan untuk memperoleh gain dari aturan fuzzy tersebut menggunakan teknik pole placement. Karena sistem pendulum-kereta terdiri dari empat state, maka diperlukan empat pole pula. Untuk mempermudah dalam penentuan pole, diasumsikan bahwa tiap subsistem memiliki dua pole yang dominan sehingga kedua subsistem tersebut dapat dipandang sebagai sistem orde kedua. Dua pole yang lainnya ditentukan dengan menempatkan dua pole tersebut minimal dua kali lebih jauh dari pole dominan. Misalkan pole lup tertutup yang diinginkan untuk subsistem ke-𝑖 adalah
𝜇𝑖= [𝜇𝑖1 𝜇𝑖2 𝜇𝑖3 𝜇𝑖4], 𝑖 = 1,2 (5) di mana 𝜇𝑖1, 𝜇𝑖2 merupakan pole yang dominan dan 𝜇𝑖3, 𝜇𝑖4 pole yang tidak dominan. Dua buah pole yang tidak dominan ditentukan sebagai berikut:
𝜇𝑖3= 3 × 𝜇𝑖1
𝜇𝑖4= 3 × 𝜇𝑖2 (6) Setelah menentukan nilai pole yang diinginkan, maka nilai matriks gain state feedback dapat dicari menggunakan teknik pole placement.
C. Perancangan Laboratorium Virtual
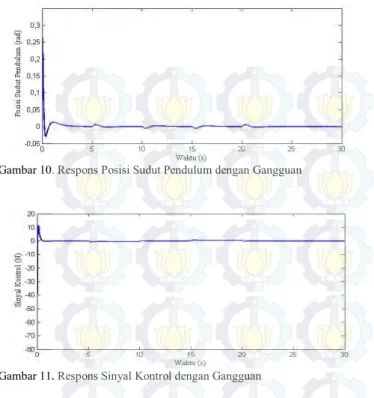
Perancangan laboratorum virtual terdiri dari dua buah bagian, yaitu perancangan model virtual reality sistem pendulum-kereta dan perancangan antarmuka. Model virtual reality adalah penggambaran 3D dinamis dari sistem pendulum-kereta.
Perancangan antarmuka untuk laboratorium virtual dilakukan pada GUIDE builder. Untuk pembuatan antarmuka ini terdiri dari beberapa komponen seperti Push Button, Check Box, Slider, Pop-up Menu dan Edit Text.
Pada penelitian ini perancangan model VR dilakukan pada 3D World Editor. Langkah pertama adalah identifikasi model fisik dari sistem pendulum-kereta. Model fisik sistem pendulum-kereta terdiri dari sebuah kereta dengan empat buah roda terpasang pada kedua sisinya, dua pasang batang pendulum, rel untuk lintasan kereta, dan kaki-kaki penyangga. Selanjutnya dibuatlah gambar 3D sesuai dengan identifikasi model fisik tersebut.
Pembuatan model VR dilakukan dengan membentuk struktur bertingkat (Tree Structure). Struktur bertingkat terdiri dari objek induk dan objek turunan. Posisi dan sikap dari objek turunan ditentukan relatif terhadap objek induknya. Model VR dapat dilihat pada Gambar 6.
IV. HASILSIMULASI
A. Simulasi untuk Sistem Kontrol
Dari Persamaan 1, persamaan state-space sistem pendulum-kereta dapat dinyatakan menjadi
𝑥̇(𝑡) = 𝐴𝑖𝑥(𝑡) + 𝐵𝑖𝑢(𝑡) , 𝑖 = 1,2 (7) dengan A1 dan B1 matriks hasil linearisasi pada titik kerja
𝑥2=0 rad, sedangkan A2 dan B2 matriks hasil linearisasi pada
𝑥2=0,2 rad, 𝑢=0. Nilai-nilai matriks tersebut adalah
𝐴1= [ 0 0 1 0 0 0 0 1 0 0,2524 0 −0,00013 0 15,0319 0 −0,00791 ] 𝐵1= [ 0 0 0,8272 1,2370 ] 𝐴2= [ 0 0 1 0 0 0 0 1 0 0.2298 0 −0,00013 0 14,6544 0 −0,0079 ] 𝐵2= [ 0 0 0,8263 1,2086 ]
Prosedur penempatan pole yang dominan ditentukan berdasarkan rasio peredaman (ξ) dan settling time (𝑡𝑠) yang diinginkan dari respons. Untuk subsistem 1 (linearisasi pada 𝑥2= 0 rad) dipilih nilai 𝜉 = 1 dan 𝑇𝑠= 2 detik. Respons yang diinginkan pada subsistem 1 menjadi redaman kritis (critically damped), sehingga berdasarkan Persamaan 3.11 dan 3.12 maka pole yang diinginkan bernilai:
𝜇1= [−2 −2 −6 −6] sehingga matriks gain state feedback bernilai
K1= [−11,88 91,32 −15,84 23,52]
Untuk subsistem 2 (linearisasi pada 𝑥2= 0,2 rad) dipilih nilai 𝜉 = 0,8 dan 𝑇𝑠= 1,5 detik. Sehingga respons yang diinginkan menjadi redaman kurang (underdamped) maka pole yang diinginkan bernilai:
𝜇2= [−2,67 + 𝑗2 −2.67 − 𝑗2, −8 + 𝑗6 −8 − 𝑗6] nilai matriks gain state feedback bernilai
K2= [−93,91 239,19 −60,16 58,77]
Selanjutnya adalah pengujian sistem kontrol yang telah dirancang. Gambar 6 menunjukkan respons posisi kereta hasil simulasi dengan swing-up yang dilanjutkan stabilisasi dalam satuan meter. Pada saat swing-up, kondisi awal sudut pendulum bernilai π radian. Untuk mengayunkan batang pendulum menuju posisi terbalik, kereta bergerak ke kanan 2 kali dan ke kiri 1 kali. Simpangan kereta saat swing-up yaitu −0,392 m sampai 0,392 m. Pada waktu 2,33 detik, kereta berada disekitar 0,2 m dan bergerak menuju titik tengah rel disekitar 4 detik.
Respons posisi sudut pendulum ditunjukkan oleh Gambar 7. Respons sudut pendulum dalam satuan radian diukur terhadap sumbu vertikal, di mana 0 radian adalah posisi terbalik. Batang pendulum mencapai posisi terbaliknya setelah berayun sebanyak 2 kali. Pendulum dapat mencapai sudut 0,3 radian pada waktu 2,33 detik dan mulai berada disekitar 0 radian setelah 2,75 detik.
Gambar 8 menunjukkan respons sinyal kontrol. Pada saat swing-up sinyal kontrol maksimum pada 12,3 N dan sinyal kontrol minimal berada pada -12,4 N. Pada waktu 2,33 detik, sinyal kontrol berganti dari sinyal kontrol swing-up menjadi
sinyal kontrol stabilisasi. Saat stabilisasi simpangan sinyal kontrol terbesar terjadi pada 7,2 N.
Untuk melihat performansi sistem terhadap gangguan, maka pada sinyal kontrol diberi gangguan dengan amplitudo sebesar ±0,5 Newton. Gangguan tersebut diberikan pada interval 5-10 detik dan 15-20 detik. Kondisi awal yang digunakan pada simulasi ini adalah x(0) = [0 0,3 0 0]𝑇.
Respons posisi kereta dengan gangguan dapat dilihat pada Gambar 9. Pada detik ke-5, kereta bergerak ke kiri untuk melawan gangguan yang diberikan dan setelah detik ke-10 kereta mulai menuju titik tengah rel. Kereta dapat mencapai titik tengah rel pada detik ke-13. Kemudian pada detik ke-15 hingga 20 diberi gangguan sebesar -0.5 N, kereta bergerak ke kanan sebesar 0,045 m untuk melawan gangguan tersebut dan dapat kembali ke titik tengah rel setelah 23 detik.
Gambar 6. Respons Posisi Kereta saat Swing-Up dan Stabilisasi
Gambar 7. Respons Posisi Sudut Pendulum saat Swing-Up dan Stabilisasi
Gambar 8. Respons Sinyal Kontrol saat Swing-Up dan Stabilisasi
Gambar 10. Respons Posisi Sudut Pendulum dengan Gangguan
Gambar 11. Respons Sinyal Kontrol dengan Gangguan
Posisi sudut pendulum dengan gangguan dalam satuan radian ditunjukkan oleh Gambar 10. Ketika diberi gangguan pada detik ke-5, respons posisi sudut pendulum menyimpang sebesar 0,006 rad setelah 5,8 detik kembali pada 0 radian. Dari Gambar 4.8 dan 4.9 terlihat bahwa sistem dapat menjaga kestabilan pendulum walau diberi gangguan.
Gambar 11 menunjukkan respons sinyal kontrol dalam satuan Newton. Terjadi simpangan sebesar -0,5 N saat diberikan gangguan pada detik ke-5 sampai detik ke-10. Ketika gangguan dilepaskan pada detik ke-15 sampai detik ke-20 terjadi simpangan sebesar 0,5 N. Adanya simpangan pada sinyal kontrol menunjukkan bahwa gangguan dapat dikompensasi oleh kontroler.
B. Simulasi untuk Laboratorium Virtual
Simulasi untuk antarmuka dilakukan dengan cara menjalankan M-file GUIDE (dengan ekstensi *.m) yang telah dirancang Antarmuka pada laboratorium virtual dapat dilihat pada Gambar 12, terdiri dari lima panel yaitu Pendulum Cart System, Controller, Parameter, View Response, dan Open Buttons.
Gambar 12. Antarmuka laboratorium virtual untuk kontrol sistem pendulum-kereta
Skema grafis 3D dari sistem pendulum-kereta ditampilkan pada panel Pendulum Cart System dengan tujuan untuk menampilkan gerak dinamis dari sistem pendulum-kereta secara real-time.
Panel Controller terdiri dari dua menu yang berfungsi untuk memilih kontroler yang diinginkan dan memilih view point sistem pendulum-kereta yang diinginkan. Pada laboratorium virtual ini menyediakan tiga kontroler yang berbeda, di mana kontroler pertama adalah kontroler yang dirancang pada penelitian ini, kontroler kedua mengacu pada [9], dan kontroler ketiga mengacu pada [10].
Pengguna dapat mengubah nilai parameter dari sistem pendulum-kereta dengan menggeser slider yang telah disediakan pada panel Parameter. Selain itu, pengguna dapat menambahkan gangguan (disturbance) dan mengubah nilai kondisi awal sudut pendulum yang diinginkan. Pada panel ini juga terdapat tombol start, stop, exit, dan help.
Grafik respons dari sistem dapat dilihat dengan menekan tombol-tombol pada panel View Response. Tombol-tombol respons tersebut meliputi respons posisi kereta, posisi sudut pendulum, kecepatan kereta, kecepatan sudut pendulum dan sinyal kontrol. Grafik respons ini juga memiliki fitur zoom.
Panel Open Buttons terdiri dari empat tombol tekan (push button) yang berfungsi untuk menunjukkan informasi tentang model Simulink, kontrol fuzzy swing-up, kontrol fuzzy T-S untuk stabilisasi, dan nilai matriks gain state feedback yang digunakan dalam sistem kontrol tersebut.
Simulasi untuk menguji laboratorium virtual ini dilakukan dengan menguji setiap tombol dan menu. Seperti pada Gambar 13 menunjukkan pengujian komponen checkbox dan slider kondisi awal dari sudut pendulum. Misal aksi yang ingin diberikan pada sistem pendulum-kereta adalah stabilisasi saja maka, pilih komponen checkbox ‘stabilizing only’ dan atur slider kondisi awal sudut pendulum yang diinginkan (misalkan 0,26 rad). Setelah perubahan tersebut, maka kondisi awal batang pendulum berpindah dari posisi menggantung menjadi pada posisi 0,26 rad, hal ini menunjukkan komponen checkbox dan slider dapat bekerja dengan baik.
Gambar 13. Perubahan Kondisi Awal Sudut Pendulum pada Laboratorium Virtual
Gambar 14. Antarmuka Laboratorium Virtual Saat Selesai Running dan Hasil Respons Sistem
Selanjutnya menguji simulasi laboratorium virtual secara keseluruhan. Pada Gambar 14, kontroler yang dipilih adalah kontroler pertama, pilih check boxes ‘swinging-up and stabilizing’, dan ganti nilai stop time menjadi 10 detik, kemudian tekan tombol start. Setelah simulasi selesai di-running, tekan tombol-tombol respons kemudian akan muncul grafik respons tersebut pada sebelah kiri antarmuka. Dari hasil pengujian dapat dilihat bahwa tombol-tombol dan menu (slider, check boxes, dll) dapat bekerja sesuai dengan fungsinya masing-masing.
V. KESIMPULAN
Setelah melakukan perancangan dan pengujian dari laboratorium virtual untuk kontrol swing-up dan stabilisasi Sistem Pendulum-Kereta dapat diambil beberapa kesimpulan. Performansi sistem kontrol fuzzy swing-up dapat bekerja dengan baik, dilihat dari respon sudut pendulum yang dapat berayun dan bergerak menuju zona stabilisasi. Kontroler stabilisasi menggunakan pendekatan model fuzzy T-S mampu mempertahankan sudut pendulum tetap tegak disekitar 0 radian dan posisi kereta berada di titik tengah rel. Kontroler ini juga mampu mengatasi gangguan. Hasil simulasi untuk laboratorium virtual menunjukkan bahwa grafik 3D, sistem kontrol, dan antarmuka dapat terintegrasi dengan baik sehingga menghasilkan simulasi kontrol sistem pendulum-kereta dengan tampilan grafis 3D secara real time.
Untuk pengembangan penelitian selanjutnya penulis menyarankan agar perancangan laboratorium virtual ini dapat terintegrasi dengan internet dan juga dapat menambahkan metode kontrol tracking untuk sistem pendulum-kereta.
DAFTARPUSTAKA
[1] Åström, K. J., dan Furuta, K., “Swinging up a Pendulum by Energy Control,” Automatica, vol. 36, pp. 287-295, 2000.
[2] Furuta, K., Yamakita, M., dan Kobayashi, S., “Swinging up Control of Inverted Pendulum Using Pseudo-state Feedback,” J. Syst.Control Eng., vol. 206, pp. 263-269, 1992.
[3] Tao, C. W., Taur, J. S., Hsieh, T. W., Tsai, C. L., “Design of a Fuzzy Controller With Fuzzy Swing-Up and Parallel Distributed Pole Assignment Schemes for an Inverted Pendulum and Cart System,” IEEE Trans. On Cont. Syst. Tech., vol. 16, pp. 1277-1288, Nopember, 2008.
[4] Lima, J. L., Gonçalves, J. C., Costa, P. G., and Moreira, A. P., "Interactive Educational Software for Dynamic System Control," International Conference on Engineering Education, ICEE, 2007 [5] Villar-Zafra, A., Zarza- Sánchezl, S., Lázaro-Villal, J. A., and
Fernández-Canti, R. M., “Multiplatform Virtual Laboratory for Engineering Education,” International Conference, IEEE, 2012.
[6] Bourne, J. R., Brodersen A. and Dawan M., “The Influence of Technology on Engineering Education”, CRC Press, Inc., 1995. [7] _____, “Control in a MATLAB Environment (MATLAB 6.5 Version),”
Feedback Instruments Ltd., England, 2004.
[8] Febrianto, T., “Desain Kontrol Fuzzy Berbasis Performansi ℎ∞
dengan Batasan Input-Output untuk Sistem Pendulum-Kereta”, Tugas
Akhir, Institut Teknologi Sepuluh Nopember, Surabaya, 2012.
[9] Agustinah, T., Jazidie A., dan Nuh M., “Hybrid Fuzzy Control for Swinging Up and Stabilizing of The Pendulum-Cart System”, Proc. IEEE Int. Conf. Computer Science and Automation Engineering, Shanghai-China, Juni, pp. 109-113, 2011.
RIWAYATPENULIS
Feni Isdaryani adalah nama lengkap penulis dengan panggilan Feni. Penulis dilahirkan di Bandung tanggal 18 Februari 1991 yang merupakan putri pertama dari tiga bersaudara pasangan Darjan Viviso dan Iis Rochmananingsih. Penulis memulai pendidikan dari TK Aisyah, SMPN 2 Kota Sukabumi, dan SMAN 3 Kota Sukabumi. Setelah menyelesaikan pendidikan SMA pada tahun 2008, penulis melanjutkan studinya di Politeknik Negri Bandung tepatnya pada Program Studi Teknik Elektronika dan lulus pada tahun 2011. Selanjutnya pada tahun 2012 penulis meneruskan studi sarjana di Teknik Elektro ITS, kemudian fokus pada bidang studi Teknik Sistem Pengaturan. Pada bulan Januari 2014 penulis mengikuti seminar dan ujian Tugas Akhir sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Elektro dari Institut Teknologi Sepuluh Nopember Surabaya.