BAB II
LANDASAN TEORI
Pada bab ini akan menjelaskan mengenai teori yang mendukung dalam pembuatan dan perealisasian proyek akhir. Teori yang akan dibahas yaitu Mikrokontroler Atmega 8535, transistor, relay, motor listrik, Time Delay Relay (TDR), pengepresan (pressing), perangkat lunak (Software).
2.1 Mikrokontroler
Mikrokontroler merupakan sebuah sistem komputer yang dikemas menjadi sebuah IC (Single Chip). Di dalam IC mikrokontroler memiliki perangkat penunjang seperti yang terdapat dalam mikrokomputer yaitu mempunyai memori RAM dan ROM, I/O, pusat pengolahan data (Central Processing Unit), dan clock seperti yang dimiliki oleh komputer PC, namun karena kemasannya sangat kecil maka spesifikasi dan kemampuan yang dimiliki oleh mikrokontroler masih rendah dibandingkan dengan sistem komputer PC. Akan tetapi, walaupun kemampuan mikrokontroler lebih rendah dari komputer PC, mikrokontroler ini bentuknya lebih fleksibel dan lebih kecil sehingga dapat digunakan pada sistem-sistem yang relatif tidak terlalu kompleks.
Pada proyek akhir ini mikrokontroler yang digunakan adalah mikrokontroler AVR Atmega 8535, karena pada mikrokontroler ini mempunyai fitur yang lengkap dan memiliki kapasitas memori data serta memori program yang cukup besar, ADC internal, timer/counter. Dengan fitur yang cukup lengkap ini, sangat memungkinkan jika menggunakan mikrokontroler Atmega 8535 karena lebih mudah dan efisien. Gambar 2.1 menunjukan tampilan dari mikrokontroler Atmega 8535.
Gambar 2.1. Mikrokontroler Atmega 8535
Berikut ini adalah fitur-fitur lengkap yang dimiliki dari mikrokontroler Atmega 8535:
1. Dilengkapi dengan programmable serial USART.
2. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
3. Mempunyai 8 channel ADC 10 bit
4. Memiliki perangkat antarmuka serial Two-Wire dengan orientasi byte.
5. Memiliki timer internal yang dapat difungsikan sebagai Real-timer.
6. Memiliki timer yang dapat difungsikan sebagai PWM (Pulse Width Modulation).
7. Memiliki watchdog timer dengan osilator internal. 8. SRAM sebesar 512 byte.
9. Port amtarmuka SPI.
10. Pengoprasian memerlukan tegangan rendah, yaitu 4,5V s/d 5,5V.
11. Pemograman dapat dilakukan pada saat run time.
12. CPU memiliki 32 buah register untuk user dan 64 buah register sebagai pegontrol yang ada pada mikrokontroler ini.
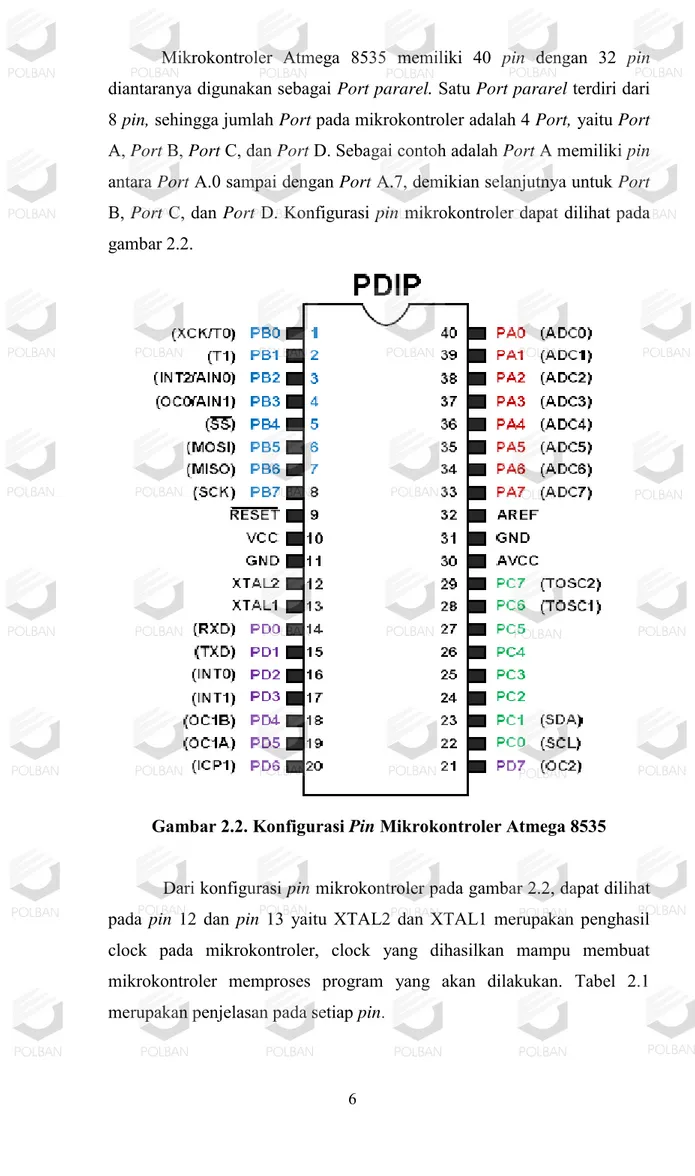
Mikrokontroler Atmega 8535 memiliki 40 pin dengan 32 pin diantaranya digunakan sebagai Port pararel. Satu Port pararel terdiri dari 8 pin, sehingga jumlah Port pada mikrokontroler adalah 4 Port, yaitu Port A, Port B, Port C, dan Port D. Sebagai contoh adalah Port A memiliki pin antara Port A.0 sampai dengan Port A.7, demikian selanjutnya untuk Port B, Port C, dan Port D. Konfigurasi pin mikrokontroler dapat dilihat pada gambar 2.2.
Gambar 2.2. Konfigurasi Pin Mikrokontroler Atmega 8535 Dari konfigurasi pin mikrokontroler pada gambar 2.2, dapat dilihat pada pin 12 dan pin 13 yaitu XTAL2 dan XTAL1 merupakan penghasil clock pada mikrokontroler, clock yang dihasilkan mampu membuat mikrokontroler memproses program yang akan dilakukan. Tabel 2.1 merupakan penjelasan pada setiap pin.
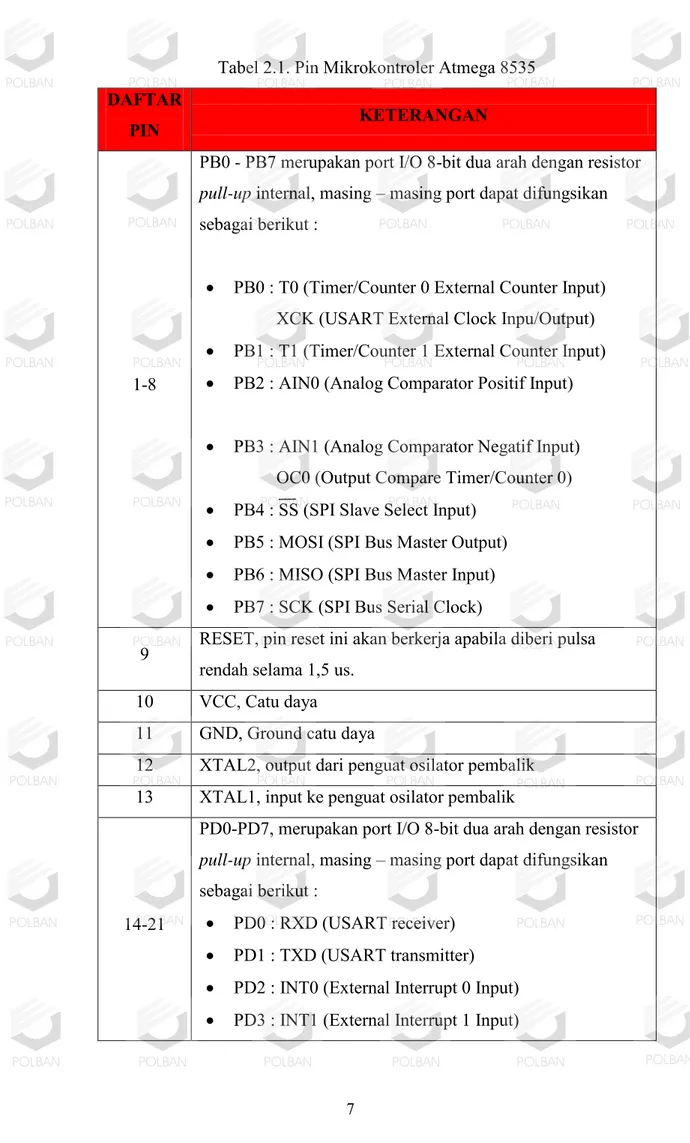
Tabel 2.1. Pin Mikrokontroler Atmega 8535 DAFTAR
PIN KETERANGAN
1-8
PB0 - PB7 merupakan port I/O 8-bit dua arah dengan resistor pull-up internal, masing – masing port dapat difungsikan sebagai berikut :
PB0 : T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Inpu/Output)
PB1 : T1 (Timer/Counter 1 External Counter Input)
PB2 : AIN0 (Analog Comparator Positif Input)
PB3 : AIN1 (Analog Comparator Negatif Input) OC0 (Output Compare Timer/Counter 0)
PB4 : SS (SPI Slave Select Input)
PB5 : MOSI (SPI Bus Master Output)
PB6 : MISO (SPI Bus Master Input)
PB7 : SCK (SPI Bus Serial Clock)
9 RESET, pin reset ini akan berkerja apabila diberi pulsa rendah selama 1,5 us.
10 VCC, Catu daya
11 GND, Ground catu daya
12 XTAL2, output dari penguat osilator pembalik 13 XTAL1, input ke penguat osilator pembalik
14-21
PD0-PD7, merupakan port I/O 8-bit dua arah dengan resistor pull-up internal, masing – masing port dapat difungsikan sebagai berikut :
PD0 : RXD (USART receiver)
PD1 : TXD (USART transmitter)
PD2 : INT0 (External Interrupt 0 Input)
PD3 : INT1 (External Interrupt 1 Input)
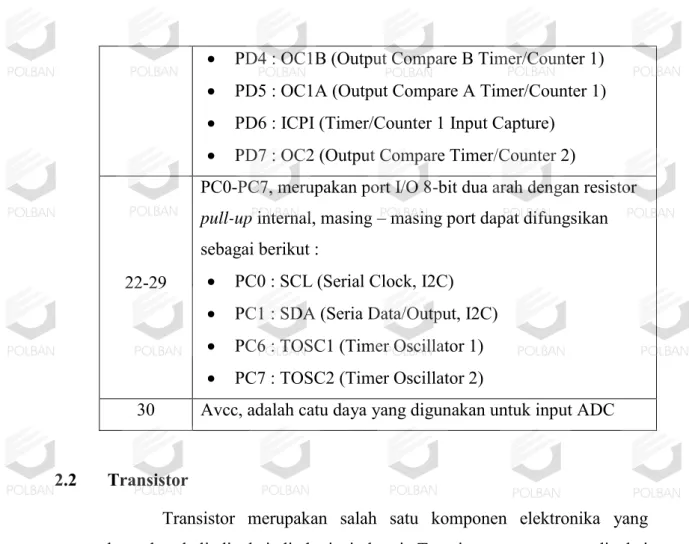
PD4 : OC1B (Output Compare B Timer/Counter 1)
PD5 : OC1A (Output Compare A Timer/Counter 1)
PD6 : ICPI (Timer/Counter 1 Input Capture)
PD7 : OC2 (Output Compare Timer/Counter 2)
22-29
PC0-PC7, merupakan port I/O 8-bit dua arah dengan resistor pull-up internal, masing – masing port dapat difungsikan sebagai berikut :
PC0 : SCL (Serial Clock, I2C)
PC1 : SDA (Seria Data/Output, I2C)
PC6 : TOSC1 (Timer Oscillator 1)
PC7 : TOSC2 (Timer Oscillator 2)
30 Avcc, adalah catu daya yang digunakan untuk input ADC 2.2 Transistor
Transistor merupakan salah satu komponen elektronika yang banyak sekali dipakai di dunia industri. Transistor yang umum dipakai memiliki 3 (tiga) metode kerja yaitu :
a. Cut Off adalah kondisi dimana transistor tidak mengalirkan arus listrik. b. Saturasi adalah kondisi dimana transistor tepat mengalirkan arus listrik. c. Aktif adalah kondisi dimana transistor bisa disebut sebagai penguat.
Simbol – simbol transistor bipolar dapat dilihat pada gambar 2.3
Gambar 2.3. Simbol – Simbol Transistor Bipolar
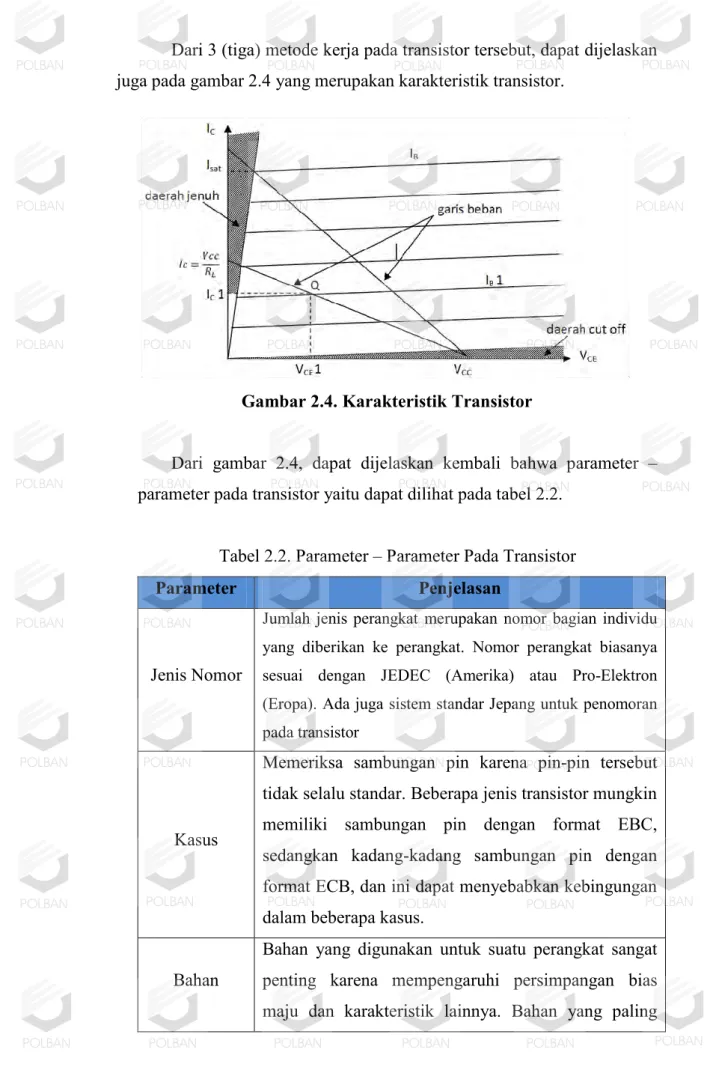
Dari 3 (tiga) metode kerja pada transistor tersebut, dapat dijelaskan juga pada gambar 2.4 yang merupakan karakteristik transistor.
Gambar 2.4. Karakteristik Transistor
Dari gambar 2.4, dapat dijelaskan kembali bahwa parameter – parameter pada transistor yaitu dapat dilihat pada tabel 2.2.
Tabel 2.2. Parameter – Parameter Pada Transistor
Parameter Penjelasan
Jenis Nomor
Jumlah jenis perangkat merupakan nomor bagian individu yang diberikan ke perangkat. Nomor perangkat biasanya sesuai dengan JEDEC (Amerika) atau Pro-Elektron (Eropa). Ada juga sistem standar Jepang untuk penomoran pada transistor
Kasus
Memeriksa sambungan pin karena pin-pin tersebut tidak selalu standar. Beberapa jenis transistor mungkin memiliki sambungan pin dengan format EBC, sedangkan kadang-kadang sambungan pin dengan format ECB, dan ini dapat menyebabkan kebingungan dalam beberapa kasus.
Bahan
Bahan yang digunakan untuk suatu perangkat sangat penting karena mempengaruhi persimpangan bias maju dan karakteristik lainnya. Bahan yang paling
umum digunakan untuk transistor bipolar adalah silikon dan germanium.
Polaritas
Polaritas pada perangkat sangat penting karena mendefinisikan polaritas bias dan pengoperasian pada perangkat. Dua tipe NPN dan PNP. NPN adalah jenis yang paling umum. Kedua tipe ini memiliki kecepatan yang lebih tinggi sebagai elektron Ketika berjalan dalam konfigurasi emitor umum, sirkuit NPN akan menggunakan tegangan rel positif dan garis umum negatif, transistor PNP akan membutuhkan rel negatif dan tegangan umum positif.
VCEO Tegangan kolektor emiter dan bias terbuka
VCBO Tegangan kolektor bias dan emiter terbuka
VEBO Tegangan emiter bias dan kolektor terbuka
IC Arus kolektor
ICM Arus puncak kolektor
IBM Arus puncak bias
PTOT
Disipasi daya total - ini biasanya untuk suhu sekitar 25oC. Ini adalah nilai maksimum dari daya yang didapat dengan aman.
ICBO Arus cut off kolektor bias
IEBO Arus cut off emiter bias
hFE Peningkatan arus
VCEsat Tegangan saturasi kolektor emiter
VBEsat Tegangan saturasi bias emiter
Cc Kapasitas kolektor
Ce Kapasitas emiter
Secara fungsinya transistor dapat berfungsi sebagai saklar, kondisi ini setara dengan kondisi transistor pada saat saturasi dan fungsi lain dari transistor adalah sebagai penguat sinyal yakni sama dengan kondisi transistor pada saat transistor dalam keadaan mode kerja aktif.
Transistor – transistor yang digunakan pada proyek akhir ini berbeda-beda, namun dalam penggunaanya sama yaitu sebagai switching untuk mengaktifkan kontak relay. Transistor yang digunakan yaitu transistor BC 107, transistor BC 547, dan transistor BD 139. Dapat dilihat pada gambar 2.5, gambar 2.6, dan gambar 2.7 adalah transistor yang digunakan.
Gambar 2.5. Komponen Transistor BC 107
Transistor BC 107 merupakan transistor tipe NPN yang digunakan sebagai switching untuk mengaktifkan kontak relay dan relay tersebut akan memberikan kontak pada lampu indikator. Pengaturan switch ini bisa dilakukan dengan mengatur bias sebuah transistor sampai transistor jenuh, maka seolah-olah akan mendapatkan hubungan singkat antara kaki kolektor dan emitor.
Gambar 2.6. Komponen Transistor BC547
Transistor BC547 merupakan transistor tipe NPN yang digunakan untuk switching agar mengaktifkan kontak relay dan relay tersebut akan memberikan kontak pada motor dc. Proses switch ini sama halnya dengan transistor BC107.
Gambar 2.7. Komponen Transistor BD139
Transistor BD139 merupakan transistor tipe NPN, sama halnya dengan transistor BC107 dan BC547 yang digunakan sebagai switching, akan tetapi penggunaan transistor BD139 ini digunakan untuk mengaktifkan kontak relay yang akan menggerakan motor ac.
2.3 Relay
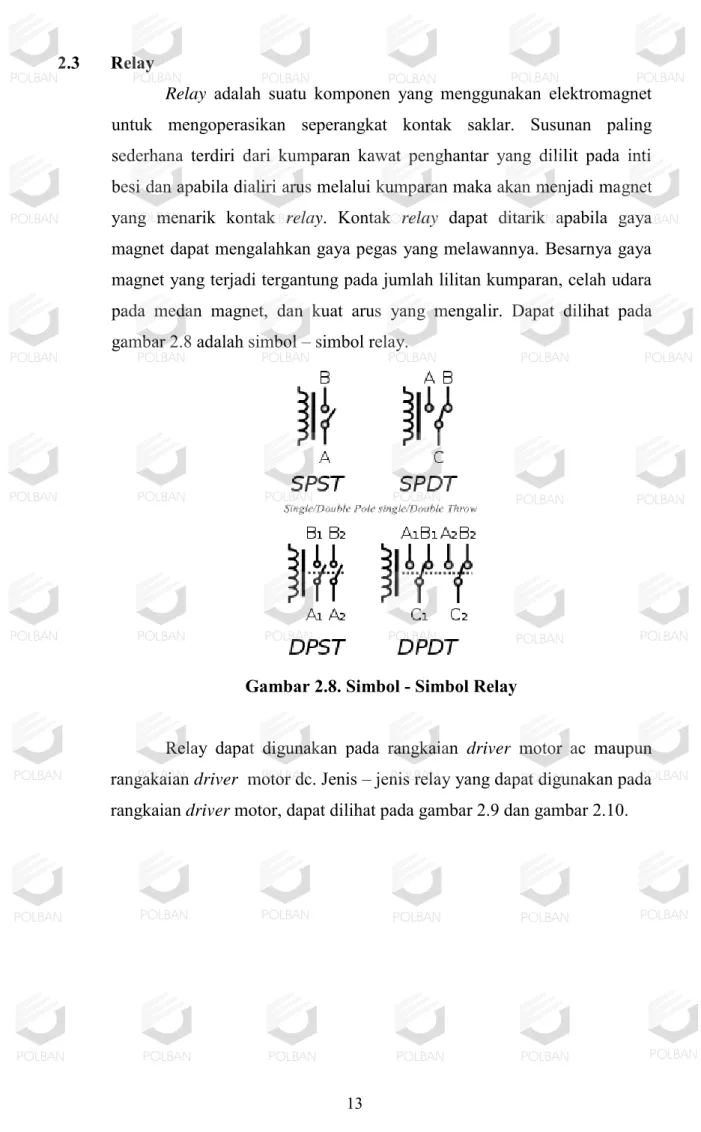
Relay adalah suatu komponen yang menggunakan elektromagnet untuk mengoperasikan seperangkat kontak saklar. Susunan paling sederhana terdiri dari kumparan kawat penghantar yang dililit pada inti besi dan apabila dialiri arus melalui kumparan maka akan menjadi magnet yang menarik kontak relay. Kontak relay dapat ditarik apabila gaya magnet dapat mengalahkan gaya pegas yang melawannya. Besarnya gaya magnet yang terjadi tergantung pada jumlah lilitan kumparan, celah udara pada medan magnet, dan kuat arus yang mengalir. Dapat dilihat pada gambar 2.8 adalah simbol – simbol relay.
Gambar 2.8. Simbol - Simbol Relay
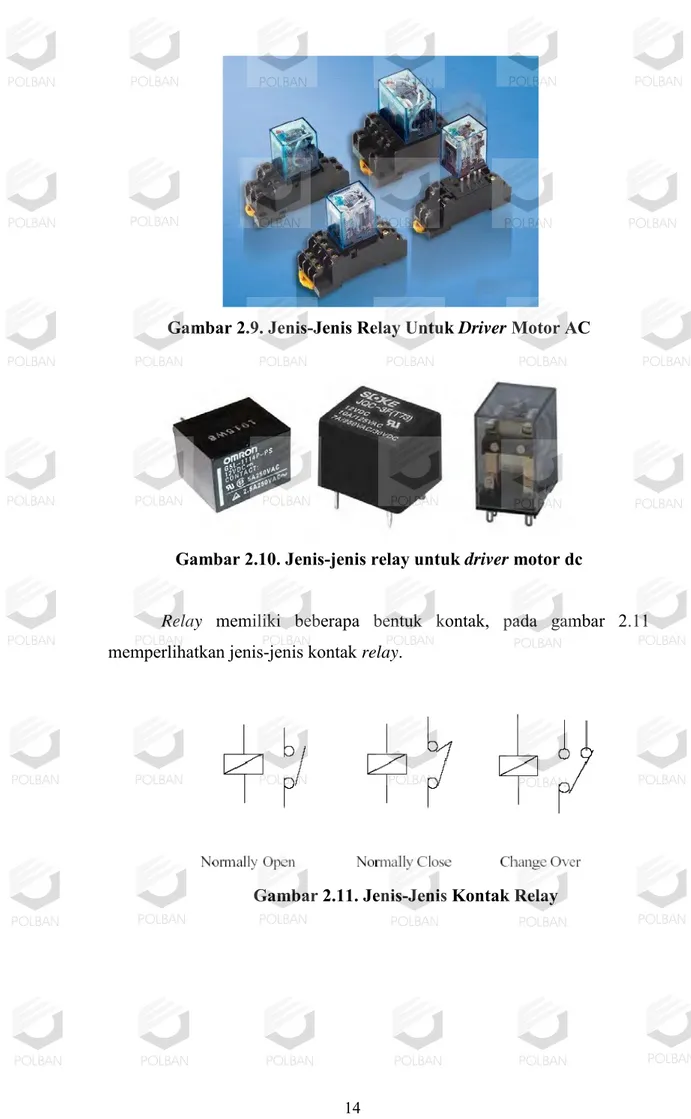
Relay dapat digunakan pada rangkaian driver motor ac maupun rangakaian driver motor dc. Jenis – jenis relay yang dapat digunakan pada rangkaian driver motor, dapat dilihat pada gambar 2.9 dan gambar 2.10.
Gambar 2.9. Jenis-Jenis Relay Untuk Driver Motor AC
Gambar 2.10. Jenis-jenis relay untuk driver motor dc
Relay memiliki beberapa bentuk kontak, pada gambar 2.11 memperlihatkan jenis-jenis kontak relay.
Gambar 2.11. Jenis-Jenis Kontak Relay
Kontak relay memiliki tiga cara kerja agar dapat berfungsi dengan baik, yaitu:
1. Pada saat kumparan dialiri arus listrik maka kontak sakelar akan tertutup, proses ini disebut relay normally open (NO). 2. Pada saat kumparan dialiri arus listrik maka kontak sekelar
akan terbuka, proses ini disebut relay normally close (NC). 3. Dan bila relay dialiri arus listrik maka kontak sakelar tengah
yang normalnya tertutup tetapi akan membuat kontak dengan yang lain, proses ini disebut relay change over (CO).
2.4 Motor Listrik
Motor listrik adalah sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik digunakan untuk memutar pompa, blower, kompresor, mengangkat beban, dll. Motor listrik digunakan juga diperalatan rumah seperti : bor listrik, mixer, kipas angin dan bisa juga digunakan di industri. Motor listrik juga bisa disebut “kuda kerja” di industri, karena motor – motor tersebut digunakan sekitar 70% beban listrik total pada setiap industri.
Mekanisme kerja untuk seluruh jenis motor listrik secara umum yaitu :
Pasangan gaya menghasilkan tenaga putar/torsi untuk memutar kumparan
Arus listrik pada medan magnet akan memberikan gaya
Jika kawat yang membawa arus dibelokan menjadi lingkaran, maka kedua sisi tersebut pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan
Motor-motor yang memiliki beberapa lingkaran pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik.
Dalam memahami sebuah motor, sangat penting untuk memahami apa yang dimaksud dengan beban motor. Beban ini mengacu pada keluaran tenaga putar sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikelompokan dalam tiga bagian yaitu :
Beban dengan variabel putaran adalah beban dengan putaran yang bervariasi dengan kecepatan operasi. Contohnya beban dengan variabel putaran adalah kipas angin dan pompa sentrifugal
Beban dengan putaran konstan adalah beban yang permintaan keluaran energinya bervariasi dengan kecepatan operasinya, namun putarannya tidak bervariasi. Contohnya beban dengan putaran konstan adalah konveyor, pompa displacement konstan, dan rotary kilns.
Beban dengan energi konstan adalah beban dengan permintaan putaran yang berubah dan berbanding terbalik dengan kecepatan. Contohnya untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
Pada motor listrik dibagi menjadi dua jenis yaitu motor DC dan motor AC, motor tersebut diklasifikasikan berdasarkan pasokan input tegangan, konstruksi, dan mekanisme operasinya. Pada gambar 2.12 diperlihatkan diagram klasifikasi jenis motor listrik.
Gambar 2.12. Klasifikasi Jenis Utama Motor Listrik
2.4.1. Motor DC
Motor arus searah (motor DC) digunakan pada penggunaan khusus dimana diperlukan penyalaan putaran yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas. Pada gambar 2.13 diperlihatkan jenis – jenis motor dc.
Gambar 2.13. Jenis-Jenis Motor DC Motor DC memiliki tiga komponen utama yaitu:
Dinamo
Bila arus menuju ke dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke sumbu penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan maget yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal itu terjadi, maka arusnya berbalik untuk merubah kutub-kutub utara dan selatan dinamo.
Kutub Medan
Secara sederhana bahwa interaksi dua kutub medan magnet akan menyebabkan perputaran pada motor DC. Motor DC
yang memiliki kutub stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor dc sederhana memiliki dua kutub medan yaitu kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi pembuka diantara kutub selatan dan utara. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet. Elektromagnet ini menerima listrik dari sumber daya sebagai penyedia struktur medan.
Commutator
Komponen ini ditemukan dalam motor DC. Fungsi dari komponen ini adalah membalikan arah arus listrik dalam dinamo. Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya.
Keuntungan dari motor DC adalah kecepatannya mudah untuk dikendalikan dan tidak mempengaruhi kualitas dari pasokan daya. Untuk mengatur motor DC ini dapat dikendalikan dengan cara:
Mengendalikan arus medan, dengan menurunkan arus medan maka kecepatan yang dihasilkan dapat ditingkatkan.
Mengendalikan tegangan dinamo, dengan menaikan
tegangan dinamo maka kecepatan dapat ditingkatkan. Jenis-jenis motor dc dibagi dua yaitu:
a. Motor DC sumber daya terpisah (Separately Excited) yaitu arus medan yang diberikan input dari sumber secara terpisah.
b. Motor DC daya sendiri (Self Excited) yaitu arus medan yang diberikan input dari satu sumber, contoh: motor shunt.
2.4.2. Motor AC
Motor AC menggunakan arus listrik yang membalikan arahnya secara teratur pada rentang waktu tertentu. Motor listrik AC memiliki dua buah bagian dasar listrik yaitu stator dan rotor. Pada gambar 2.14 diperlihatkan bagian stator dan rotor pada motor listrik AC.
Gambar 2.14. Bagian Stator dan Rotor Pada Motor AC Stator merupakan komponen listrik statis dan rotor merupakan komponen listrik berputar untuk memutar as motor. Keuntungan utama motor DC terhadap motor AC adalah kecepatan motor AC lebih sulit dikendalikan, dan untuk mengatasi kesulitan ini, motor AC dapat dilengkapi dengan penggerak frekuensi variabel untuk meningkatkan kendali kecepatan sekaligus menurunkan dayanya.
Jenis-jenis motor AC yaitu: a. Motor sinkron
Motor sinkron adalah motor AC yang bekerja pada kecepatan tetap dan pada frekuensi tertentu. Motor ini memerlukan arus DC untuk pembangkit daya dan memiliki torsi awal yang rendah, oleh karena itu motor sinkron cocok
untuk penggunaan awal dengan beban rendah, seperti generator motor dan kompresor udara.
b. Motor Induksi
Motor induksi merupakan motor yang paling umum digunakan pada berbagi peralatan industri. Karena rancangannya sederhana, murah, dan mudah didapat, serta dapat langsung dihubungkan ke sumber daya AC.
2.5 Time Delay Relay (TDR)
Time delay relay (TDR) atau relay penunda batas waktu banyak digunakan dalam instalasi motor listrik, terutama instalasi yang membutuhkan pengaturan waktu secara otomatis. Peralatan kontrol ini dapat dikombinasikan dengan peralatan kontrol lain, contohnya dengan MC (Magnetic Contactor), Thermal Over Load Relay. Pada gambar 2.15 diperlihatkan simbol TDR.
Gambar 2.15. Simbol TDR
Fungsi dari peralatan kontrol ini adalah sebagai pengatur waktu bagi peralatan yang dikendalikan. Timer ini dimaksudkan untuk mengatur waktu hidup atau mati dari kontaktor. Timer dapat dibedakan dari cara kerjanya yaitu:
a. Timer yang bekerja dengan prinsip induktor motor listrik akan bekerja apabila motor listrik mendapatkan tegangan AC sehingga memutar gigi mekanis dan menarik serta menutup kontak secara mekanis dalam jangka waktu tertentu.
b. Relay yang menggunakan prinsip elektronik, terdiri dari R dan C yang dihubungkan seri atau pararel, apabila tegangan telah mengisi penuh pada kapasitor, maka relay akan terhubung. Lamanya waktu tunda diatur berdasarkan besarnya pengisian kapasitor. Bagian input timer biasanya dinyatakan sebagai kumparan dan bagian output sebagai kontak NO (Normally Open) atau NC (Normally Close).
Relay penunda batas waktu ini, cara kerjanya berdasarkan kumparan pada timer akan bekerja selama mendapatkan arus, apabila telah mencapai batas waktu yang diinginkan maka secara otomatis timer akan mengunci dan membuat kontak NO menjadi NC dan NC menjadi NO.
Dapat dilihat pada gambar 2.16 dan gambar 2.17 adalah bentuk timer yang digunakan dan diagram pada timer tersebut.
Gambar 2.16. Bentuk Time Delay Relay
Gambar 2.17. Diagram Time Delay Relay
2.6 Pengepresan (Pressing)
Pressing yaitu melakukan proses penekanan terhadap bahan atau benda yang akan dipress agar lebih rapih dan berkualitas tinggi, dengan cara kerjanya:
1) Memeriksa bahan yang akan dipress agar jelas yang akan dilakukan
2) Proses pengepresan dilakukan dari atas ke bawah
3) Mengatur waktu yang dibutuhkan dalam proses pengepresan 4) Mengatur suhu yang dibutuhkan agar plastik yang sudah dipress
tidak bocor (udara masuk lagi ke dalam plastik)
Proses pengepresan bantal ini dapat memberikan pengaruh yang besar pada tampilan yang dihasilkan, sehingga akan meningkatkan kualitas dan harga dari bantal tersebut. Proses pengepresan yang dimaksud adalah top pressing. Top pressing adalah proses dimana bantal yang sudah selesai dibuat dan dibungkus dengan plastik lalu di press, dengan demikian hasil bantal yang dibuat dapat dikemas dengan tampilan yang lebih baik.
2.7 Perangkat Lunak (Software)
Pemograman yang dilakukan pada pembuatan proyek akhir ini yaitu menggunakan Basic Compiler (BASCOM) AVR. Basic Compiler adalah suatu program compiler dengan bahasa pemograman tingkat tinggi yang dilengkapi dengan simulasi ke bahasa mesin. Definisi dari bahasa pemograman yaitu bahasa komputer yang digunakan dengan cara merancang atau membuat pemograman sesuai struktur dan metode yang dimiliki oleh bahasa program itu sendiri. Pada gambar 2.18 diperlihatkan tampilan depan BASCOM AVR.
Gambar 2.18. Tampilan Pada BASCOM AVR
Pada pemograman menggunakan BASCOM AVR memiliki
beberapa jenis variabel data dan karakter, penjelasannya dapat dilihat pada tabel 2.3.
Tabel 2.3. Jenis variabel data pada pemograman BASCOM AVR No. Jenis Varibel Data Keterangan
1 1 Bit (1/8 byte) 8 buah bit sama dengan 1 byte
2 1 Byte 1 Byte memiliki 8 bit biner yang mempunyai address 0 – 255 3 2 Bytes (Integer) 2 Bytes memiliki 16 bit biner
4 Word Word ini memiliki 16 bit biner yang mempunyai address 0 – 65535 5 4 Bytes (Long) 4 Bytes memiliki jumlah 32 bit biner 6 Single Single memiliki jumlah 32 bit biner yang bernilai 1,5x10
45 s/d 3,4x1038
7 String String memiliki panjang dimensi sebanyak 10 bytes