PENGUJIAN DAN ANALISIS
Bab ini membahas mengenai pengujian alat serta analisis dari hasil pengujian tersebut. Tujuan dilakukan pengujian adalah mengetahui sejauh mana kinerja hasil perancangan yang telah dibahas pada Bab III serta mengetahui tingkat keberhasilan tiap spesifikasi yang telah diajukan. Pengujian yang dilakukan meliputi pengujian per bagian maupun keseluruhan sistem.
Tahapan Pengujian I.1.
Sistem yang telah dibuat akan diuji dalam beberapa bagian. Pengujian dipisahkan berdasarkan bagian – bagian dari sistem. Sistem terdiri dari dua bagian yaitu sistem kendali dan sistem repeater. Untuk bagian sistem kendali pengujian adalah pengujian perangkat lunak pengontrol sebagai pemberi instruksi dan kesesuaian data yang diterima pada modul USR-WIFI232-G. Sementara pada sistem repeater akan dilakukan pengujian data yang diterima pada mikrokontroler menjadi data yang dikirimkan melalui media infra merah.
Pengujian perangkat lunak pengontrol dilakukan untuk melihat seberapa akurat data yang dikirim oleh komputer kendali atau mobile smart phone dan data yang diterima oleh modul USR-WIFI232-G. Hal ini perlu dilakukan karena instruksi yang dikirimkan dan diterima akan disaring dan diambil instruksi yang benar merupakan perintah robot WowWee Robosapien saja yang akan diproses dalam proses repeater. Pengujian juga dilakukan untuk melihat seberapa jauh jarak yang dapat ditempuh antara perangkat kendali dengan robot WowWee Robosapien.
Peralatan pengujian adalah peralatan yang dilakukan untuk melakukan pengujian sekaligus juga sebagai tempat pembuatan sistem kendali. Pengujian juga dilakukan untuk mengetahui seberapa akurat sinyal infra merah keluaran dari mikrokontroler. Pengujian yang diuji menggunakan bantuan alat adalah, pengujian infra merah, pengujian sistem kendali, pengujian sistem repeater. Pengujian dan pembuatan sistem kendali komputer menggunakan notebook ASUS A55VJ dengan spesifikasi sebagai berikut :
Processor : Intel Core-i5 3230M, 2.6 GHz
Memory : 4 GB DDR3
Hard disk drive : Western Digital 750 GB WLAN : Wi – Fi 802.11 b/g/n
Sistem operasi : Windows 7 Ultimate Edition.
Sementara perangkat lunak yang digunakan dalam perancangan dan pengujian adalah :
Bahasa Pemrograman : Visual C#
Perangkat Lunak : Microsoft Visual Studio .NET 2010
Pengujian dan pembuatan sistem kendali pada mobile smart phone menggunakan smart phone SAMSUNG Galaxy Wonder GT-I8150 dengan spesifikasi sebagai berikut :
Processor : 1.4 GHz Scorpion
Memory : 512 MB
WLAN : Wi-Fi 802.11 b/g/n, Wi-Fi hotspot Sistem operasi : Android OS, v2.3.6
Sementara perangkat lunak yang digunakan dalam perancangan dan pengujian adalah :
Bahasa Pemrograman : Java
Pengujian Modul USR-WIFI232-G I.3.
Modul USR-WIFI232-G merupakan komponen penting dalam perancangan skripsi ini. Modul ini digunakan sebagai access point yang bertugas menerima data untuk diterukan ke mikrokontroler, dan mengirim data dari mikrokontroler kepada kendali. Pengujian ini bertujuan untuk memastikan bahwa modul USR-WIFI232-G dapat bekerja dengan baik.
Modul USR-WIFI232-G dapat dikatakan bekerja dengan baik apabila ketika diberi tegangan 3.3v pada pin DVDD. Ketika modul aktif maka indikator status Ready pada modul akan berlogika 0 dan led hijau indikator menyala
Gambar 4.1. Modul USR-WIFI232-G dalam keadaan aktif.
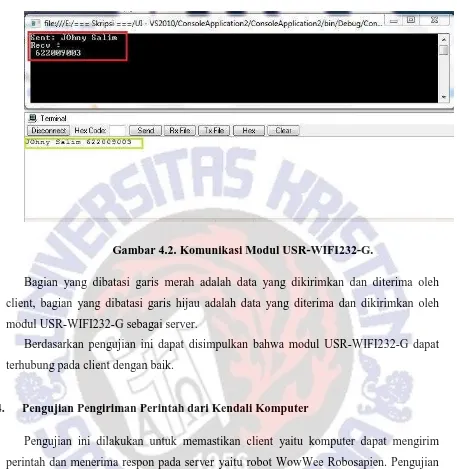
Gambar 4.2. Komunikasi Modul USR-WIFI232-G.
Bagian yang dibatasi garis merah adalah data yang dikirimkan dan diterima oleh client, bagian yang dibatasi garis hijau adalah data yang diterima dan dikirimkan oleh
modul USR-WIFI232-G sebagai server.
Berdasarkan pengujian ini dapat disimpulkan bahwa modul USR-WIFI232-G dapat terhubung pada client dengan baik.
Pengujian Pengiriman Perintah dari Kendali Komputer I.4.
Gambar 4.3. Antar muka kendali komputer.
Gambar 4.4. Koneksi kendali dengan server gagal.
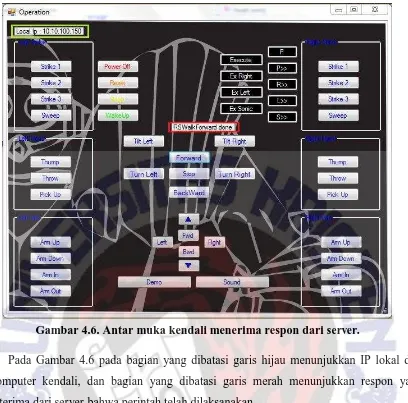
Gambar 4.6. Antar muka kendali menerima respon dari server.
Pada Gambar 4.6 pada bagian yang dibatasi garis hijau menunjukkan IP lokal dari komputer kendali, dan bagian yang dibatasi garis merah menunjukkan respon yang diterima dari server bahwa perintah telah dilaksanakan.
Berdasarkan pengujian ini dapat disimpulkan pengiriman data dari kendali komputer dapat diberjalan dengan baik.
Pengujian Pengiriman Perintah dari Kendali Smart Phone
I.5.
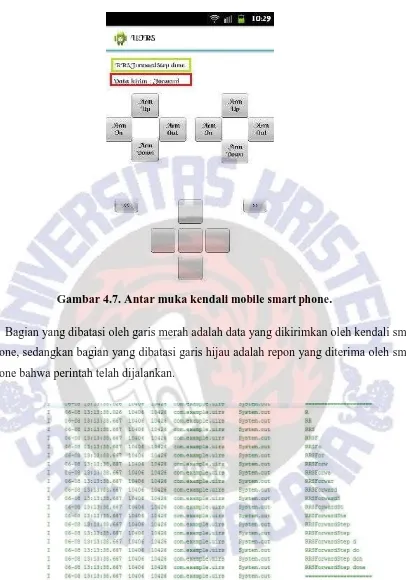
Gambar 4.7. Antar muka kendali mobile smart phone.
Bagian yang dibatasi oleh garis merah adalah data yang dikirimkan oleh kendali smart phone, sedangkan bagian yang dibatasi garis hijau adalah repon yang diterima oleh smart
phone bahwa perintah telah dijalankan.
Gambar 4.8 menjelaskan penerimaan respon oleh perangkat kendali smart phone yang menerima data dari server per karakter dan Gambar 4.9 menunjukkan perintah yang telah diterima oleh modul USR-WIFI232-G.
Gambar 4.9. Modul USR-WIFI232-G menerima perintah dari smart phone.
Berdasarkan pengujian ini dapat disimpulkan pengiriman data dari kendali mobile smart phone dapat diberjalan dengan baik.
Pengujian Infra Merah I.6.
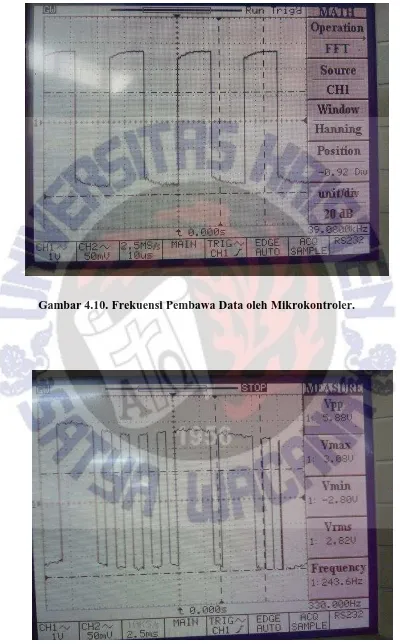
Gambar 4.10. Frekuensi Pembawa Data oleh Mikrokontroler.
Frekuensi pembawa data yang terdapat pada Gambar 4.10 menunjukkan frekuensi yang dihasilkan mikrokontroler sebesar 39.0 kHz, dari hasil tersebut dapat dianalisa ada perbedaan 0.5 % antara 39.0 kHz dan 39.2kHz. Berdasarkan pengujian tersebut dapat disimpulkan perbedaan 0.5% dari sinyal pembawa data masih dapat diterima oleh penerima sinyal infra merah pada robot WowWee Robosapien.
Pada metode pengiriman data pada robot WowWee Robosapien, data yang bernilai 0 dimodulasi berupa sinyal high selama 1/1200 detik dan sinyal low selama 1/1200 detik. Data yang bernilai 1 dimodulasi berupa sinyal high selama 4/1200 detik dan sinyal low selama 1/1200 detik. Berdasarkan pada Gambar 4.11 yang berupa sinyal yang telah dimodulasi sesuai dengan metode pengiriman data pada robot WowWee Robosapien, dapat dilihat sinyal tersebut memiliki nilai biner 1 0 0 0 0 1 1 0 atau dalam nilai heksadesimal adalah 0x86, nilai tersebut sesuai dengan perintah “Forward” yang dikirimkan oleh kendali.
Berdasarkan pengujian ini dapat disimpulkan pengiriman data dalam bentuk infra merah ke robot WowWee Robosapien dapat berjalan sesuai dengan metode pengiriman data pada robot WowWee Robosapien.
Pengujian Keseluruhan Sistem I.7.
Pengujian ini dilakukan untuk mengetahui kinerja dan ketahanan sistem yang dirancang. Pengujian yang dilakukan adalah pengujian ketepatan data dari setiap kendali yaitu kendali komputer atau kendali smart phone menjadi gerakan yang tepat pada robot WowWee Robosapien.
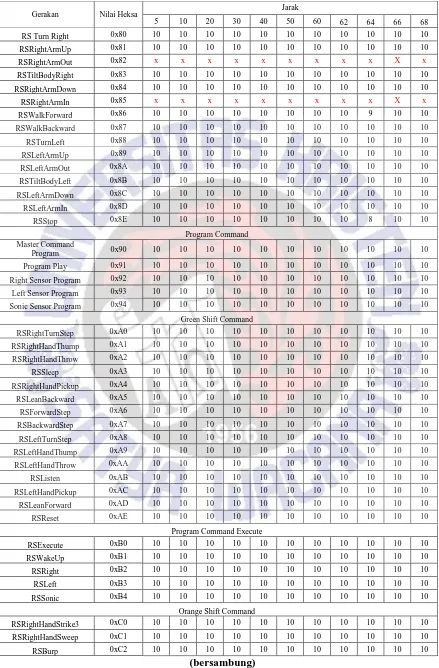
Pengujian dilakukan setiap gerakan dilakukan percobaan pengiriman perintah sebanyak 10 kali setiap jaraknya. Kriteria keberhasilan dari pengujian ini adalah perintah dari tiap jenis kendali dapat menjadi gerakan yang tepat pada robot WowWee Robosapien, dan kendali dapat menerima respon bahwa perintah telah dilakukan.
Tabel 4.4. Hasil Pengujian Data dan Jarak Kendali Smart Phone. (lanjutan)
Pada perintah “Right Arm Out” dan “Right Arm In” tidak dapat dilakukan karena lengan dari robot WowWee Robosapien yang dilakukan pengujian mengalami kerusakan.
Berdasarkan hasil pengujian tersebut dapat disimpulkan bahwa akuisisi data pada kendali komputer kurang stabil pada jarak dari 64 meter , terbukti dengan hilangnya beberapa pesan respon yang didapatkan oleh kendali komputer dari mikrokontroler. Hal ini terjadi sinyal wifi dari modul USR-WIFI232-G melemah atau menghilang sehingga tidak memungkinkan kendali komputer dan modul USR-WIFI232-G untuk bertukar data. Total tingkat keberhasilan pengujian ini adalah 96.7% per jarak dibawah 64 meter dan tingkat keberhasilan sebesar 95.3% pada jarak 64 meter.