BAB I
PENDAHULUAN
I.1. Latar Belakang
Meningkatnya kegiatan pembangunan khususnya pada daerah perkotaan menyebabkan orientasi pembangunan mengarah secara vertikal pada pemanfaatan ruang baik ke atas maupun ke bawah permukaan tanah (Seno dkk, 2015). Gedung bertingkat seperti rumah susun sebagai solusi akan keperluan ruangan di daerah perkotaan yang digunakan sebagai hunian maupun kegiatan-kegiatan ekonomi, sosial, pendidikan, dan kebudayaan hingga bangunan untuk pemerintahan. Setiap unit rumah susun dapat dimiliki satu orang maupun orang-orang yang berlainan (Kurniawan dkk, 2015).
Data spasial mengenai letak, posisi, dan batas-batas kepemilikan 3D yang dimasukan dalam peta pendaftaran tanah untuk satuan rumah susun dapat ditampilkan secara 2D maupun 3D. Sistem kadaster di Indonesia sendiri masih menggunakan pendekatan data 2D dalam pendaftaran tanah dan rumah susun. Tampilan data spasial secara 2D berupa peta untuk setiap lantai gedung bertingkat, sehingga peta tersebut dapat digunakan untuk keperluan kadaster 3D (Seno dkk, 2015).
Peta kepemilikan atas suatu ruang untuk kepentingan kadaster sampai saat ini masih banyak dibuat dengan menggunakan peralatan berbasis single point seperti Theodolit, Total Station atau Geodetic Positioning System (GPS) ataupun dengan pita ukur (Hendriatiningsih dkk, 2012). Pengambilan data menggunakan peralatan berbasis single point tidak efisien, dikarenakan peralatan yang digunakan hanya dapat mengukur satu persatu titik objek gedung yang dipetakan. Proses akuisisi data menjadi lebih lama dengan menggunakan prinsip tersebut.
Penggunaan peralatan berbasis single point lebih memerlukan banyak waktu dan energi apabila digunakan untuk akuisisi data pada gedung bertingkat. Waktu banyak terbuang untuk pembuatan titik poligon di setiap lantai. Titik poligon tersebut harus diketahui koordinatnya dan harus saling terikat satu dengan yang lainnya,
dimana titik tersebut digunakan untuk mengabungkan data yang dihasilkan pada setiap lantai gedung bertingkat.
Ilmu pengetahuan dan teknologi sudah berkembang dan mengalami kemajuan sesuai dengan perkembangan zaman dan cara berfikir manusia, termasuk teknologi pengukuran di bidang geodesi. Salah satu teknologi terbaru di bidang geodesi yaitu Terestrial Laser Scaner (TLS) yang dapat menghasilkan model 3D dari suatu gedung atau lokasi yang dipetakan. TLS merupakan suatu instrumen yang memancarkan sinar laser untuk memindai (scan) segala objek yang ada di sekelilingnya. Hasil scan tersebut direpresentasikan dalam bentuk titik (point) yang jumlahnya sangat banyak yang disebut sebagai point clouds. Point clouds tersebut kemudian ditampilkan dengan model 3D. Kelebihan dari alat ini dibandingkan dengan alat survei lain adalah dapat melakukan akuisisi data di lapangan lebih cepat karena tidak memerlukan banyak titik poligon yang diketahui koordinatnya (Quintero dkk, 2008).
Model 3D hasil pengukuran menggunakan peralatan TLS tentunya dapat memvisualisasikan informasi berupa point clouds dari suatu objek. Adanya informasi point clouds ini akan lebih mudah untuk dibuat peta. Kegitan aplikatif ini menghasilkan peta setiap lantai gedung bertingkat yang dihasilkan dari ekstraksi point clouds 3D untuk kepentingan kadaster 3D.
I.2. Rumusan Masalah
Pembuatan peta dengan menggunakan peralatan berbasis single point tidak efektif karena memerlukan banyak waktu dan tenaga dalam proses akuisisi data di lapangan. Terrestrial Laser Scanner menawarkan kemampuan untuk pembuatan model 3D dan peta setiap lantai gedung bertingkat dari hasil pemindaian berupa point clouds 3D dengan waktu akuisisi data di lapangan relatif singkat dan tingkat ketelitian yang baik.
I.3. Cakupan Kegiatan
1. Lokasi kegiatan aplikatif ini adalah gedung Teknik Geodesi yang memanjang dari barat ke timur.
2. Peralatan yang digunakan berupa Terrestrial Laser Scanner tipe Faro focus 3D X330. Proses akuisisi data menggunakan metode target based dan proses registrasi menggunakan metode target to target dan metode cloud to cloud. 3. Perangkat lunak yang digunakan untuk pembuatan peta dalam kegiatan
aplikatif ini adalah Autodesk Inventor 2016.
4. Kegiatan aplikatif ini difokuskan pada pembuatan peta setiap lantai gedung Teknik Geodesi serta model 3D bagian luar gedung Teknik Geodesi.
I.4. Tujuan Tujuan dilakukannya kegiatan ini adalah :
1. Menghasilkan model 3D untuk memvisualisasikan informasi dari suatu gedung.
2. Menghasilkan peta yang digunakan untuk dokumentasi terbaru dari suatu gedung bertingkat melakui ekstraksi point clouds 3D hasil pengukuran Terestrial Laser Scaner (TLS) sehingga dapat digunakan untuk kepentingan kadaster 3D.
I.5. Manfaat Kegiatan
Manfaat dari kegiatan ini adalah memberikan suatu metode alternatif untuk pembuatan peta guna keperluan kadaster 3D dari suatu gedung bertingkat.
I.6. Landasan Teori I.6.1. Terrestrial Laser Scanner (TLS)
Terrestrial Laser Scanning (TLS) merupakan instrumen analisis objek real world yang dapat mengumpulkan data berupa titik-titik dalam jumlah besar dengan akurasi yang tinggi dan waktu yang singkat, kemudian ditampilkan dalam bentuk 3D. Tujuan dari pengukuran dengan metode TLS untuk menciptakan titik-titik awan dari permukaan objek dalam bentuk geometrik yang terdiri dari jutaan titik. Hasil pemindaian berupa titik-titik awan kemudian dilakukan registrasi data untuk menciptakan model lengkap (Quintero dkk, 2008).
Teknik pengukuran TLS dibagi menjadi dua metode, yaitu metode statik dan metode dinamis. Prinsip metode statik yaitu mendirikan TLS pada lokasi yang tetap atau tidak bergerak. Keuntungan menggunakan metode ini yaitu ketelitian yang dihasilkan relatif tinggi dan jumlah titik yang dihasilkan lebih banyak. Prinsip metode dinamik yaitu menempatkan peralatan TLS pada wahana yang bergerak seperti pesawat dan mobil untuk pemetaan (Vidyan dkk, 2013).
Faro focus 3D X330 merupakan salah satu tipe TLS statik jarak dekat. Peralatan Terrestrial Laser Scanner ini mempunyai jarak pemindaian sejauh 330 meter sehingga termasuk dalam golongan TLS statik jarak dekat. Peralatan Faro facus 3D X330 seperti terlihat pada Gambar I.1.
Gambar I. 1. Faro focus 3D X330
I.6.2. Prinsip Kerja TLS
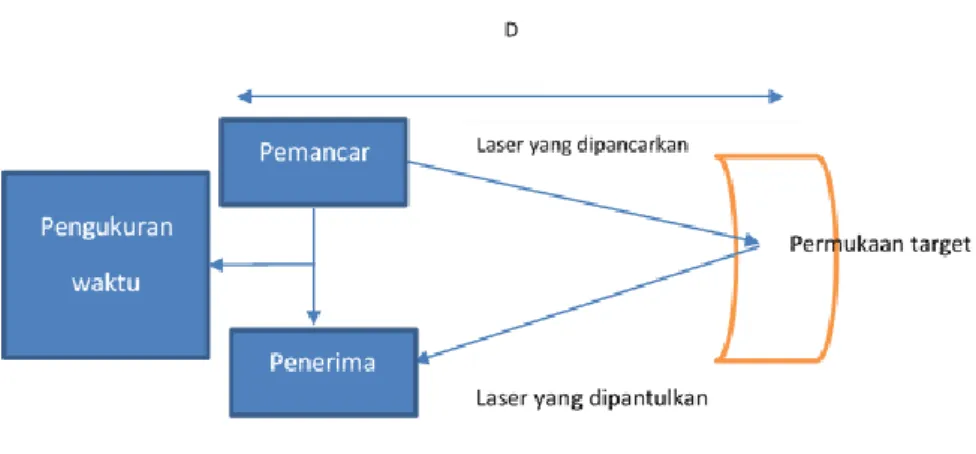
Prinsip Kerja TLS adalah pengukuran yang didasarkan kepada waktu tempuh gelombang laser sejak dipancarkan sampai diterima kembali oleh penerima pulsa laser tersebut. Waktu tempuh tersebut digunakan untuk menghitung jarak alat TLS dengan target (Gambar I.2).
Jarak dari alat ke objek dapat dihitung dengan persamaan I.1. Berdasarkan persamaan tersebut jarak alat ke objek dipengaruhi oleh waktu tempuh gelombang sinar laser sejak dipancarkan sampai kembali ke alat tersebut dan cepat rambat gelombang (Quintero dkk, 2008). Jarak D dihitung dengan persamaan (Quintero dkk, 2008):
D = ½ x c x ∆t ………... ( I.1)
Keterangan :
D : Jarak dari alat ke objek
c : Kecepatan Rambat Gelombang (2,99 x 108 m/s) ∆t : Waktu Tempuh (s)
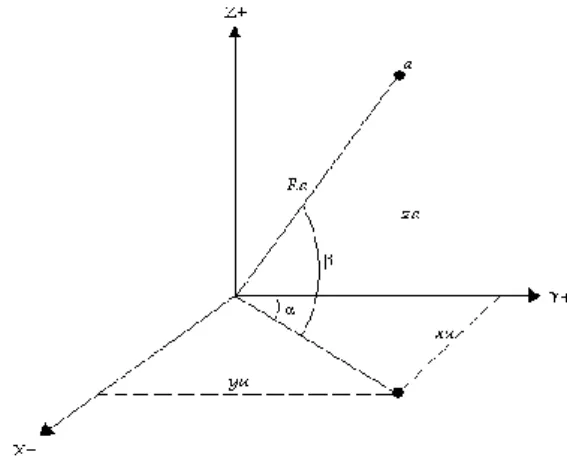
Sistem koordinat yang dihasilkan oleh scanner adalah sistem koordinat lokal. Dimana sumbu X+ tegak lurus terhadap sumbu Y+ ke arah kanan. Sumbu Y+ sendiri searah dengan scanner dan sumbu Z+ tegak lurus terhadap bidang XY. Origin pada sistem koordinat ini berhimpit dengan origin sistem koordinat scanner. Sistem koordinat lokal dari scanner ini terlihat pada Gambar I.3.
Gambar I. 3. Sistem koordinat lokal scanner (Soeta’at, 2005)
Data yang direkam oleh scanner berupa sudut horizontal (α), sudut vertikal (β), dan jarak dari pusat scanner ke objek yang direkam (Ra). Gambar I.3 memperlihatkan bahwa bidang X dan Y dijadikan reference plane untuk koordinat scanner. Scanner
bergerak ke atas dan ke bawah serta ke kanan dan ke kiri searah pergerakan jarum jam (Soeta’at, 2005).
Maka koordinat 3 dimensi yang terekam dapat ditentukan dengan persamaan I.2, persamaan I.3, dan persamaan I.4 berikut :
Xa = Ra . cos β.Sin α....………...……….….… (I.2) Ya = Ra . cos β. cos α …….………..……….…...…. (I.3) Za = Ra . sin β……….……….……….….…...(I.4)
Dimana :
Ra : Jarak scanner ke titik objek β : sudut vertikal titik objek α : Sudut horizontal titik objek Xa,Ya, Za : Koordinat point clouds
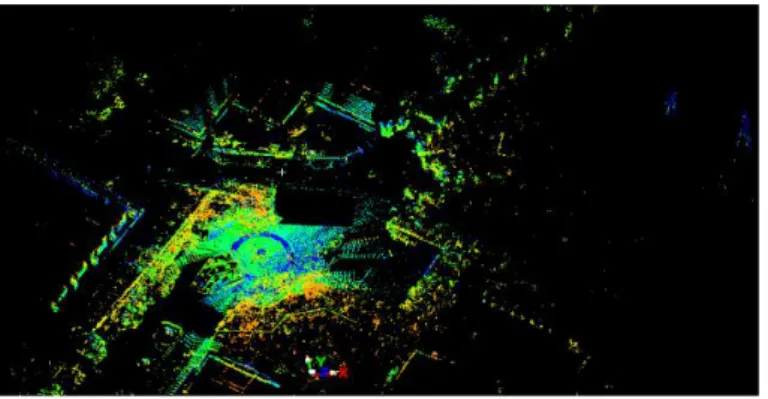
I.6.3. Point Clouds
Point clouds merupakan kumpulan data titik dalam ruang 3D dalam suatu sistem koordinat (Sitek, 2006). Point clouds dapat merepresentasikan bentuk 3D objek pada daerah yang dipetakan seperti Gambar I.4. Point clouds mempunyai tujuan untuk menghasilkan model 3D dari objek yang direkam. Model 3D yang terbentuk tersebut dapat digunakan sebagai dokumentasi dari suatu gedung. Model 3D gedung tersebut selanjutnya dapat digunakan untuk analisis yang lebih mendalam dalam berbagai keperluan sebagai pertimbangan sebelum mengambil keputusan.
I.6.4. Registrasi Data Point Clouds
Registrasi adalah proses penggabungan data hasil perekaman ke dalam satu sistem koordinat tunggal. Penggabungan ini merupakan gabungan data dari beberapa posisi hasil pemindaian (scan world) agar semua scan world menjadi satu sistem yang sama. Ada 3 metode yang digunakan dalam melakukan registrasi data (Reddington, 2005). yaitu:
1. Metode target to target
Pada metode ini titik ikat yang digunakan untuk registrasi adalah titik target yang dipasang di sekitar objek dan diidentifikasi pada saat perekaman data. Bentuk target beranekaragam, salah satunya adalah sphere. Sphere merupakan target berupa bola yang mempunya diameter tertentu seperti yang terlihat pada Gambar I.5.
Gambar I. 5. Target sphere
Target berupa sphere tadi diletakkan secara merata ke area pemindaian atau diletakkan pada cakupan TLS yang dapat terlihat dari berbagai arah tempat berdiri TLS seperti yang terlihat pada ilustrasi registrasi target to target pada Gambar I.6.
Persebaran titik target yang merata dan banyak akan memberikan kualitas registrasi yang lebih baik dari pada metode cloud to cloud. Ketentuan ini berlaku dengan syarat minimal titik target yang saling terlihat antara scan world minimal 3 titik target. Dikarenakan pada sistem transformasi koordinat 3D terdapat 6 parameter. Dapat dilihat dalam persamaan transformasi koordinat 3D pada persamaan I.5 dan I.6 (Wolf,1993).
X xo tx
Y = s R yo + ty
Z zo tz …………...(I.5)
R merupakan matriks rotasi yang terdiri dari 3 baris dan 3 kolom
m11 m12 m13 m21 m22 m23 m31 m32 m33 .………...(I.6) m11 = cos φ cos κ m21 = -cos φ sin κ m31 = sin φ
m12 = cos ω sin κ + sin ω sin φ cos κ m22 = cos ω cos κ - sin ω sin φ sin κ m32 = - sin ω cos φ
m13 = sin ω sin κ – cos ω sin φ cos κ m23 = sin ω cos κ + cos ω sin φ sin κ m33 = cos ω cos φ
ω, φ, κ = parameter rotasi tx = translasi sumbu x ty = translasi sumbu y tz = translasi sumbu z Xo, Yo, Zo = koordinat asal X, Y, Z = koordinat hasil
Tranformasi yang dilaksanakan dalam kegiatan aplikatif ini untuk mengubah sistem koordinat setiap scan world ke sistem koordianat global atau biasa disebut geo-referencing. Geo-referencing merupakan proses tranformasi koordinat melalui proses translasi dan rotasi dari model 3D yang dihasilkan. Proses geo-referencing sendiri dijelaskan pada sub bab geo-referencing.
2. Metode cloud to cloud
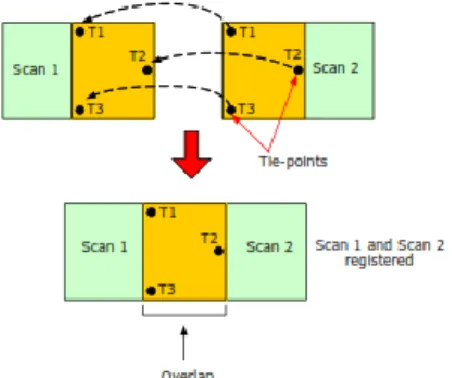
Pada metode ini titik ikat yang digunakan untuk registrasi didapat dari titik-titik objek hasil perekaman sehingga pada saat perekaman tidak perlu pemasangan target. Syarat agar scan world dapat diregistrasi yaitu antar scan world harus memiliki pertampalan atau overlap antar scan point clouds minimum sebesar 30 % dari daerah yang direkam. Semakin besar daerah yang bertampalan maka akan menghasilkan hasil registrasi yang lebih baik.
Metode ini mempunyai keunggulan dengan proses akuisisi di lapangan lebih cepat karena tidak perlu memperhatikan persebaran target di lapangan. Kekurangan dari metode ini adalah proses pengerjaan studio yang relatif lebih lama dikarenakan memerlukan beberapa kali iterasi untuk menyamakan point clouds yang saling overlap. Ilustrasi proses registrasi cloud to cloud seperti pada Gambar I.7.
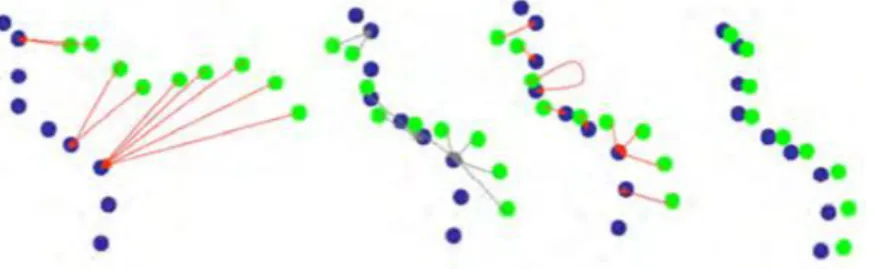
Gambar I. 7. Ilustrasi registrasi cloud to cloud (Reshetyuk, 2009) Terjadi 3 kali iterasi dalam proses registrasi cloud to cloud antara point clouds dari 2 scan world yang berwarna hijau dengan scan world yang berwana biru seperti ditunjukkan pada Gambar I.7. Proses 3 kali itersasi yang ditunjukkan pada Gambar I.7 belum membuat registrasi dengan metode cloud to cloud berhasil dengan sempurna. Ditunjukkan dengan point clouds dari 2 scan world tersebut belum menyatu dengan sempurna sehingga diperlukan
lebih banyak lagi proses iterasi untuk menyatukan point clouds dari ke dua scan world. Semakin banyak iterasi yang dilakukan maka hasil registrasi akan semakin teliti atau semakin baik.
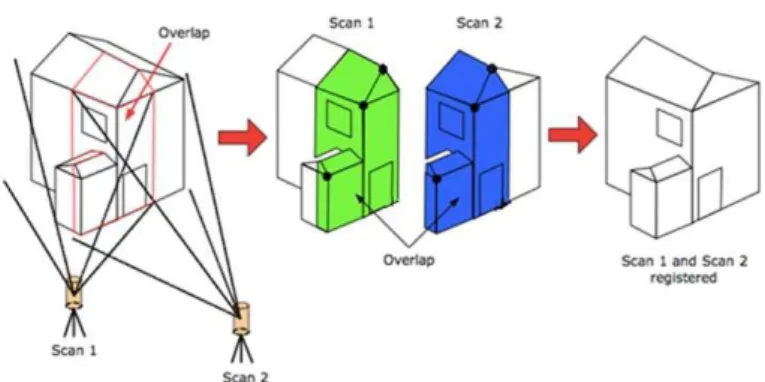
Gambar I. 8. Ilustrasi registrasi cloud to cloud pada bangunan (Reshetyuk, 2009)
Gambar I.8 memperlihatkan overlap point clouds yang didapat dari lokasi scan 1 dan scan 2. Point clouds yang overlap tersebut digunakan untuk dasar registrasi metode cloud to cloud untuk menghasilkan model 3D gedung tersebut.
3. Metode Kombinasi
Metode kombinasi yaitu suatu metode dengan proses registrasi yang dilakukan secara kombinasi yaitu antara cloud to cloud dengan target to target. Metode kombinasi meminimalisir kekurangan dari kedua metode yang digunakan. Oleh karena itu kualitas hasil registrasi dan ukurannya untuk metode ini memiliki kualitas yang lebih baik dibanding dengan cloud to cloud maupun target to target. Registrasi metode kombinasi diawali dengan proses registrasi metode target to target terlebih dahulu, jika hasil registrasi masih kurang baik maka dilanjutkan dengan metode cloud to cloud untuk menyempurnakannya.
Semua jenis metode tersebut pada dasarnya menggunakan prinsip Iteractive Closest Point (ICP). Iteractive Closest Point adalah konsep alogaritma yang digunakan dalam menghitung korespondensi antara dua buah scan serta menghitung transformasi untuk meminimalisir jarak antara titik
yang saling terkorespondensi (Segal, 2016). Terdapat 6 langkah utama dalam alogaritma proses ICP yaitu preprocessing, matching, weighting, rejection, error, dan minimization (Rusinkiewicz, 2016) . Untuk mengetahui secara jelas mengenai proses tersebut, maka berikut ini penjelasan untuk masing-masing tahapannya.
1. Preprocessing
Tahapan preprocessing adalah tahapan pemilihan point clouds yang akan digunakan dalam tahapan matching. Point clouds yang dianggap noise akan diabaikan dan dihilangkan pada tahapan ini. 2. Matching
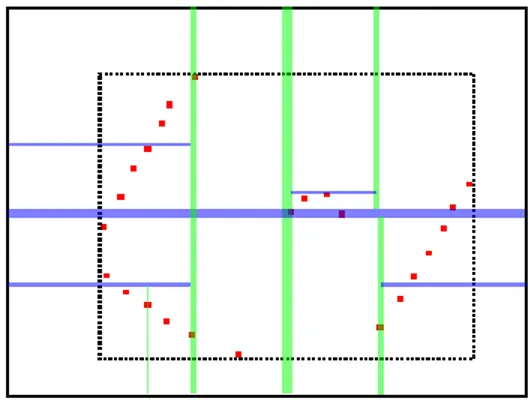
Tahapan matching adalah tahapan untuk proses pengolahan point clouds berdasarkan objek yang sama. Tahapan ini menggunakan sistem pencarian neighbor dengan radius tertentu atau sering disebut proses k-d tree. K-d tree adalah data struktur yang bersifat space-partitioning yang bertujuan untuk mengatur dan mencari titik terdekat dalam k-dimensional tree (Gosno dkk, 2013). Proses ini menggunakan titik tengah dari scan world sebagai titik awal kemudian membagi tengah scan world untuk memperoleh empat buah segmen. Lalu dari masing-masing segmen dibagi menjadi segmen lebih kecil sehingga diperoleh kelompok-kelompok kecil point clouds dalam satu segmen. Ilustrasi dari proses pembagian segmen ini dapat dilihat pada Gambar 1.9.
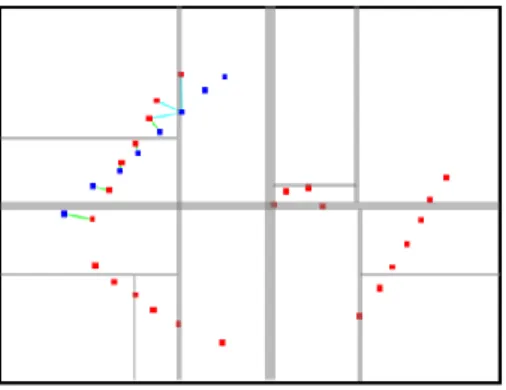
Pembagian segmen tersebut akan mempermudah dalam pengemlompokan point clouds objek yang kemungkinan sama. Pengelompokan point clouds objek dapat dilihat pada gambar I. 10.
Gambar I. 10. Ilustrasi matching k-d tree (Colas dkk, 2011) Pada gambar I. 10 terlihar masing-masing segmen kecil memiliki point clouds. Proses k-d tree ini akan memudahkan dan mempercepat dalam proses mencari pasangan point clouds objek yang sama.
3. Weighting
Tahapan weighting merupakan tahapan pemilihan titik yang perlu dan tidak perlu digunakan dalam proses ICP.
4. Rejecting
Tahapan Rejecting adalah tahapan penghapusan beberapa data yang telah lolos dari proses weighting karena terdapat titik dengan multiple pasangan.
5. Error
Tahapan Error adalah tahapan perhitungan elemen-elemen transformasi untuk setiap titik. Perhitungan tersebut dapat dibagi menjadi 2 jenis, yaitu point to point dan point to plane seperti yang dpat dilihat pada Gambar I. 11 dan Gambar I. 12.
Gambar I. 12. Ilustrasi point to plane (Burgard dkk, 2011) 6. Minimization
Tahapan minimization adalah tahapan penerapan parameter transformasi yang telah diketahui berdasar pada proses error. Setelah 6 tahapan ini terkadang point clouds dari beberpa scan world belum tergabung menjadi sempurna, oleh kerana itu diperlukan iterasi proses ICP. Iterasi dilakukan pada proses matching sampai minimization hingga point clouds tersebut tergabung menjadi satu.
I.6.5. RMSE ( Root Mean Squre Error )
Merupakan suatu ukuran kesalahan antara dua buah nilai yang bersesuaian dalam hal ini nilai hasil ukuran di lapangan dengan nilai yang sebenarnya. Semakin besar nilai RSME yang didapatkan maka ketelitian yang dihasilkan akan semakin jelek sedangkan nilai RMSE yang semakin kecil menandakan hasil registrasi model yang dihasilkan semakin teliti. Untuk rumus perhitungan RSME seperti yang terlihat pada persamaan I.7.
𝑅𝑀𝑆𝐸 = √∑(𝑅−𝑅1)2
𝑛 ………(I.7)
Keterangan:
RMSE : Root Mean Square Error R : Nilai yang dianggap benar R1 : nilai hasil ukuran
Persamaan 1.7 dapat dijabarkan menjadi persamaan 1.8 sebagai berikut: RMSE = √∑[(X−X1)2+(Y−Y1)2+ (Z−Z1)2]
n ………(I.8)
Keterangan:
RMSE : Root Mean Square Error
X : Nilai koordinat X yang dianggap benar X1 : Nilai koordinat X hasil ukuran
Y : Nilai koordinat Y yang dianggap benar Y1 : Nilai koordinat Y hasil ukuran
Z : Nilai koordinat Z yang dianggap benar Z1 : Nilai koordinat Z hasil ukuran
n : Jumlah point clouds yang digunakan untuk proses registrasi.
Perangkat lunak Faro scene digunakan dalam proses registrasi, oleh karena itu standar RMSE yang digunakan mengikuti standar dari perangkat lunak tersebut. Perangkat lunak Faro scene mempunyai standar apakah hasil registrasi memenuhi TOR (Term of reference) atau tidak. Faro scene memberikan indikator berupa warna untuk batas-batasan TOR tersebut warna hijau < 10 mm, warna kuning 10 mm dan 20 mm , dan merah > 20 mm (Manual Faro, 2015).
I.6.6. Geo-referencing
Geo-referencing merupakan proses transformasi dari sistem koordinat scanner yang masih dalam sistem koordinat lokal ke sistem koordinat tanah yang mana sangat penting dalam integrasi dengan data geospasial lainnya (Reshetyuk, 2009). Tahapan dalam geo-referencing pada point clouds adalah transformasi dari sistem koordinat scanner ke sistem koordinat tanah. Metode geo-referencing dapat dikelompokkan menjadi 3 yaitu indirect geo-referencing, direct geo-referencing dan metode data-driven (Schuhmacher dan Böhm dalam Paffenholz, 2012).
Indirect geo-referencing adalah geo-referencing data point clouds hasil dari pengukuran TLS metode statik. Geo-referencing ini membutuhkan parameter transformasi yang terdiri dari 3 parameter translasi (X, Y, Z) dan 3 buah rotasi (,
φ, ). Direct geo-referencing adalah metode geo-referencing dimana data point clouds langsung teregistrasi secara otomatis saat akuisisi data di lapangan. Direct geo-referencing memanfaatkan sensor positioning, inklinometer, kompas, dan gyroscopes yang terdapat pada peralatan tersebut. Sedangkan data-driven geo-referencing menurut Schuhmacher merupakan proses geo-referencing dengan memanfaatkan data point clouds atau data model 3D yang sudah ada sebelumnya. Data point clouds tersebut diperoleh dari pengukuran LIDAR ataupun foto udara yang telah dilakukan proses geo-referencing sehingga sudah mempunyai sistem koordinat tanah. Data point clouds yang sudah ada digunakan sebagai acuan geo-referencing data point clouds hasil pengukuran Terrestrial Laser Scanner yang baru. Caranya dengan mendekatkan data point clouds yang baru dengan data point clouds hasil pengukuran LIDAR yang telah tergeo-referencing sebelumnya.
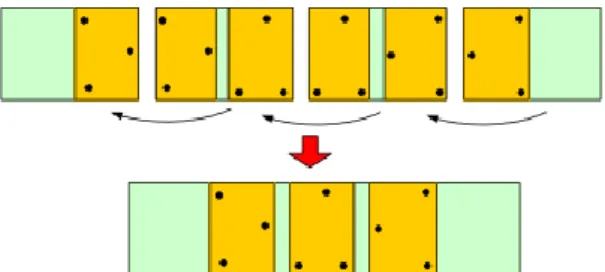
Indirect geo-referencing mempunyai 2 metode, yaitu one-step approach dan two-step approach. Indirect georeferencing dengan metode two-step approach dipilih dalam pelaksanaan kegiatan aplikatif ini. Metode two-step approach mempunyai 2 tahapan utama. Tahapan pertama yaitu global registration, proses dimana setiap scan world yang masih mempunyai sistem koordinat berbeda-beda diregistrasi sehingga menjadi satu sistem koordinat yang sama. Sistem koordinat yang dihasilkan masih dalam sistem koordinat lokal atau sistem koordinat scanner. Ilustrasi tahapan global registration seperti pada Gambar I.13. Tahapan ke dua pada metode ini yaitu merubah hasil registrasi global ke sistem koordinat tanah dengan memanfaatkan titik kontrol seperti Gambar I.14. Metode two-step approach mempunyai keunggulan dengan kebutuhan titik kontrol yang sedikit sehingga tidak diperlukan survei lebih untuk pengadaan titik ikat.
Gambar I.13 memperlihatkan bahwa sebelum dilakukan global registration masing-masing scan world terpisah-pisah. Tahapan registration global membuat semua scan world menjadi satu sistem koordinat yang sama. Hasil global registration tersebut ditransformasi ke sistem koordinat tanah seperti Gambar I.14.
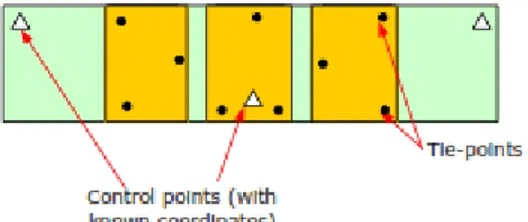
Gambar I. 14.Tahapan ke dua dalam metode two-step approach (Reshetyuk, 2009). Gambar I.10 tersebut menjelaskan bahwa pada tahapan kedua two-step approach hasil global registration yang masih dalam koordinat lokal atau koordinat scanner ditransformasi ke dalam sistem koordinat tanah dengan memanfaatkan 3 titik kontrol. Ke tiga titik kontrol tersebut sudah diketahui koordinatnya dan digunakan sebagai acuan dalam proses geo-referencing.
Tahapan kedua pada Indirect geo-referencing dengan metode two-step approach minimal menggunakan 2 titik kontrol yang diketahui koordinatnya sebagai acuan. Titik kontrol pertama digunakan sebagai masukan koordinat dan titik kontrol ke dua digunakan sebagai acuan arah orientasi dengan menghitung nilai azimuthnya. Persamaan untuk menghitung nilai azimuth seperti pada persamaan I.9.
α12 = ArcTan ((X2-X1)/(Y2-Y1))... (1.9) Keterangan: α12 : Azimut dari 1 ke 2
X1 : Koordinat X di titik 1 X2 : Koordinat X di titik 2 Y1 : Koordinat Y di titik 1 Y2 : Koordinat Y di titik 2
Geo-referencing merupakan proses transformasi dari satu sistem koordinat scanner ke koordinat tanah. Gambar I.15 merupakan ilustrasi dari komponen-komponen geo-reference.
Gambar I. 15. Ilustrasi geo-referencing sistem koordinat TLS (Paffenholz, 2012) Keterangan :
L-frame : Sistem koordinat scanner (lokal) G-frame : Sistem koordinat tanah
γ : Nilai azimut pada sistem koordinat scanner p : Titik obyek pada sistem koordinat scanner
: Jarak titik P terhadap pusat sistem koordinat scanner : Sudut horizontal titik P terhadap sistem koordinat scanner : Sudut vertikal titik P terhadap sisitem koordinat scanner z || Z : Sumbu z sistem koordinat scanner sejajar dengan sumbu Z
pada sistem koordinat tanah
tLG : Translasi dari sistem kordinat scanner ke sistem koordinat tanah
p jL : vektor titik P terhadap pusat sistem koordinat scanner
(L-frame) sebelum geo-referencing
p jG : vektor titik P terhadap pusat sistem koordinat tanah
(G-frame) sebelum geo-referencing
p iG : Posisi titik P terhadap pusat sistem koordinat tanah setelah
geo-referencing
ω ; φ ; κ : Nilai rotasi sumbu X, sumbu Y dan sumbu Z
Indirect geo-reference dengan metode two-step approach dipilih untuk digunakan dalam kegiatan aplikatif ini, sehingga diperlukan proses global registration untuk
menyatukan semua scan world menjadi satu sistem koordinat. Indirect geo-reference memerlukan 6 parameter transformasi, yaitu 3 parameter translasi (X, Y, Z) dan 3 buah rotasi (, φ, ). Reshetyuk menyatakan bahwa rotasi dan translasi dapat dinotasikan dalam bentuk matematika. Notasi bentuk matematis untuk translasi seperti pada persamaan I.10.
∆𝑋𝑖 = [∆𝑋 ∆𝑌 ∆𝑍]𝑇... ( I.10)
Keterangan :
X : Matriks translasi.
X : Selisih nilai X pada sistem koordinat scanner dengan sistem koordinat tanah.
Y : Selisih nilai Y pada sistem koordinat scanner dengan sistem koordinat tanah.
Z : Selisih nilai Z pada sistem koordinat scanner dengan sistem koordinat tanah. Rotasi dapat dinotasikan dalam persamaan I.11 sebagai berikut :
𝑅𝑖 = 𝑅3(). 𝑅2(𝜑). 𝑅1(𝜔)... (I.11)
Dimana komponen R1, R2, R3 adalah :
𝑅1(𝜔) = [10 cos 𝜔0 sin 𝜔0 0 − sin 𝜔 cos 𝜔 ] 𝑅2(𝜑) = [ cos 𝜑 0 − sin 𝜑 0 1 0 sin 𝜑 0 cos 𝜑 ] 𝑅3() = [ cos sin 0 − sin cos 0 0 0 1 ]
Diperoleh persamaan geo-referencing sebagai berikut :
𝑋𝑒= ∆𝑋𝑖+ 𝑅𝑖... (I.12)
Keterangan :
Xe : Persamaan geo-referencing ke sistem koordinat tanah.
Xi : Matriks translasi sistem koordinat scanner ke sistem koordinat tanah.
I.6.7. Total Station
Total Station adalah instrumen optis/elektonik yang digunakan dalam pemetaan dan konstruksi bangunan. Total Station merupakan teodolit yang terintegrasi dengan komponen pengukuran jarak elektonik untuk membaca jarak dan kemiringan dari instrumen ke titik. Salah satu tipe Total Station adalah Trimble M3DR yang dapat digunakan dengan dan tanpa prisma atau sering disebut reflectorless. kemampuan ukur Total Station tipe ini dapat digunakan untuk mengukur jarak sampai 300 m ( User Guide Trimble M3 DR Series). Total Station Trimble M3DR seperti terlihat pada Gambar I.16.
Gambar I. 16. Total Station Trimble M3DR I.6.8. Autodesk Inventor
Autodesk Inventor merupakan perangkat lunak CAD dalam bidang teknik yang diaplikasikan untuk perancangan mekanik model 3D seperti desain produk, desain mesin, desain mold, desain kontruksi atau keperluan teknik lainnya. Autodesk Inventor adalah program pemodelan solid berbasis fitur parametrik, artinya semua objek dan hubungan antar geometri dapat dimodifikasi kembali meski geometrinya sudah jadi, tanpa perlu mengulang lagi dari awal. Fitur tersebut mempermudah ketika melakukan desain suatu produk atau rancangan.
Perangkat lunak Autodesk Inventor dapat digunakan untuk pembuatan model 3D dari suatu produk, untuk membuat objek tersebut diperlukan data 2D yang diimport dari AutoCAD lainnya. Perangkat lunak ini juga dapat digunakan untuk ekstraksi model 3D kedalam bentuk 2D. Autodesk Inventor dapat menampilkan data point clouds 3D hasil Terrestrial Laser Scanner. Point clouds 3D dalam perangkat lunak ini
dapat digunakan untuk merekontruksi objek secara 3D ataupun 2D. Tampilan Autodesk Inventor dapat dilihat pada Gambar I.17.
Gambar I. 17. Perangkat lunak Autodesk Inventor
I.6.9. Kadaster 3 Dimensi
Kadaster 3D adalah suatu sistem kadaster yang menyatakan dan memberikan pandangan pada kewenangan dan pembatasan tidak hanya pada persil tanah tetapi pada unit properti 3D. Unit properti 3D atau properti 3D adalah ruang terbatas (memiliki batas-batas yang jelas) yang dapat dimiliki oleh seseorang dengan suatu hak yang sesuai dengan ketentuan (Kurniawan dkk, 2015).
Pada dasarnya properti meliputi semua properti (tanah dan bangunan) yang dimiliki oleh seseorang atau badan, karena bangunan memiliki dimensi pamjang, lebar dan tinggi. Persil 2D dapat dikategorikan sebagai properti 3D, walaupun tidak secara eksplisit memiliki batas-batas yang jelas, apabila persil tersebut dimiliki dan digunakan oleh satu orang saja. Properti yang dimiliki oleh seorang pemilik tunggal tidak menimbulkan permasalahan ruang dimensi. Masalah akan muncul pada situasi properti 3D atau situasi 3D.
Situasi 3D menunjuk pada keadaan dimana unit-unit properti yang dapat berbeda-beda penggunannya, ditempatkan pada suatu properti atau gedung bertingkat-tingkat. Kondisi dimana satu-kesatuan gedung tersebut terletak pada satu bedang persil.
I.6.10. Uji Statistik Signifikansi Perbedaan Jarak
Uji statistik yang digunakan untuk menguji suatu hipotesis dua sampel adalah uji-t dua pihak (two tail test) dengan tingkat kepercayaan 95% atau memiliki taraf signifikansi (α) 5%. Uji dua pihak digunakan jika hipotesis nol (Ho) berbunyi “=” dan hipotesis alternatif (Ha) berbunyi “≠”. Rumus I.13 adalah rumus t-test untuk menguji hipotesis (Widjajanti, 2011). Uji hipotesis yang dilakukan menggunakan sampel kecil dan kedua sampel berpasangan.
𝑡 = ∆𝑙𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎− 𝛿
𝑆∆𝑙
√𝑛
⁄
... (I.13)
Rata-rata beda jarak dan simpangan baku dihitung dengan rumus: ∆𝑙rata-rata = ∑ ∆𝑙 𝑛 ... (I.14) 𝑆∆𝑙 = √∑ ( ∆𝑙𝑖 − ∆𝑙𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 ) 2 𝑛−1 ... (I.15) dengan:
∆𝑙𝑖 : beda jarak dua metode pengukuran
∆𝑙𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 : rata-rata beda jarak dua metode pengukuran δ : beda jarak yang diharapkan (nol)
𝑙 : simpangan baku beda jarak
𝑛 : jumlah data
Uji hipotesis menggunakan uji dua pihak berlaku ketentuan, bahwa Ho: tidak terdapat perbedaan yang signifikan antara jarak bagian gedung hasil pengukuran dengan Terrestrial Laser Scanner dengan hasil pengukuran menggunakan Total Station, sedangkan Ha: terdapat perbedaan yang signifikan. Jika nilai t hitung berada pada daerah penerimaan Ho atau terletak di antara harga t tabel negatif dan positif (kolom: tα/2 dan baris: degree of freedom r = n – 1), maka Ho diterima dan Ha ditolak. Dengan demikian, jika harga t hitung lebih kecil atau sama dengan harga tabel negatif dan harga t hitung lebih besar atau sama dengan harga tabel positif, maka Ho ditolak dan Ha diterima.
Perbedaan jarak suatu bagian gedung dapat dihitung dengan rumus: ∆l =[𝑙2−𝑙1
dengan:
∆l : beda jarak (%)
l1 : jarak bagian gedung hasil metode pengukuran TLS
l2 : jarak bagian gedung hasil metode pengukuran Terrestrial Laser
Scanner I.6.11. Model 3 Dimensi
3D modeling merupakan proses mengembangkan matematika representasi dari setiap tiga dimensi benda dengan menggunakan perangkat lunak khusus. Pembangunan geometri untuk bangun 3D berhubungan dengan pemrosesan representatif grafik seperti bentuk, ukuran objek, dan tingkat kehalusan serta kekasaran objek sehingga model yang digunakan dalam pemodelan dapat memberikan representatif visual seperti keadaan sebenarnya (AutoCAD 2010 User Manual, 2010). Pembentuk model 3D dibagi menjadi 3 kategori, yaitu :
a. Solid
Model ini menentukan volume, massa, dan inersia objek yang diwakilinya seperti pilar gedung. Membangun objek dengan cara mengkombinasikan objek primitif dari bangun benda solid seperti kubus, silinder dan torus juga dapat dilakukan dengan dikenai operasi gabungan (union), irisan (intersect), dan selisih (different) untuk mendapatkan bentuk solid yang baru. Model solid ini lebih realistis sehingga lebih sering digunakan seperti untuk simulasi non visual seperti teknik simulasi, CAD dan khususnya untuk rekontruksi geometri solid suatu objek. Model primitif solid juga mempunyai kekurangan karena struktur datanya yang relatif besar sehingga membatasi pengguna untuk menciptakan benda yang kecil. Model solid pembentuk model 3D seperti yang terlihat pada Gambar I.18.
b. Surface
Model ini mewakili bentuk permukaan obyek yang dimodelkan. Model ini lebih mudah untuk digunakan dalam pekerjaan dari pada bentuk solid. Pembentukan model 3D permukaan yang dibentuk dari primitif surface seperti pada Gambar I.19.
Gambar I. 19.Bentuk model 3D dari primitif surface c. Mesh
Mesh merupakan sebuah model jaring terdiri dari simpul, tepi, dan permukaan yang menggunakan representasi poligonal untuk menentukan bentuk 3D. Model 3D yang terbentuk dari mesh tidak memiliki massa, tetapi model mesh dapat digunakan untuk memodelkan model solid ataupun surface. Mesh memberikan kemampuan untuk mengatur kehalusan ataupun suatu kondisi sebenarnya dari objek yang dimodelkan. Retakan, lipatan, maupun tingkat kekasaran obyek dapat dimodelkan dengan sempurna dengan menggunakan mesh. Model 3D yang dibentuk dari model mesh seperti yang terlihat pada Gambar I.120.