SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Disusun oleh :
Siti Wardani
NIM : 023114033
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
Bahwa tidak semua yang diharapkan akan terjadi. Tidak semua yang diinginkan akan terpenuhi dan Tidak semua yang diminta akan diberikan.
Jangan pernah mengeluh ketika kamu harus menghadapinya !! Jangan pernah menyerah ketika keadaan tidak memihakmu dan Jangan pernah lelah untuk meneruskan langkahmu.
Akan datang saatnya kau akan tersenyum, Akan tiba waktunya lukamu akan terobati, dan
Akan ada saatnya kamu akan menertawakan apa yang kamu lakukan saat ini.
Cobalah untuk menerima kenyataan walau pahit yang kau rasakan dan Cobalah lupakan kepedihan dan mulailah tersenyum.
Apa yang dulu terlihat baik kini nampak sangat buruk.
Apa yang dulu terasa manis, kini nampak kegetiran karena itu pula
Apa yang terasa memilukan tak selamanya demikian. Apa yang kini kamu sesali suatu saat akan kamu syukuri. Karena kamu telah melakukannya dan
Apa yang kini membuatmu tertunduk dalam kesedihan Suatu saat akan mendatangkan sorak kegembiraan.
Penuhi hatimu dengan ucapan Syukur dan Siapkan hatimu untuk segala kemungkinan. Belajarlah menerima kenyataan dan
Jangan ada putus asa dalam hidup sebab Allah megasihimu Ia ada di dekatmu dan kau berharga di hadapan NYA.
Dengan kerendahan hati dan penuh rasa syukur skripsi ini kupersembahkan untuk :
Allah SWT Yang Maha Kasih
Keluarga tercinta ....Bapak, Mamak, dan adik-adikku
Keluarga Besar H. M. Soeharjo dan Kertorejo atas kasih sayangnya
Almamaterku tercinta
dimiliki obyek tersebut.
Metode Jarak Minimum adalah suatu penglasifikasi yang digunakan untuk
menglasifikasikan suatu obyek ke dalam suatu kelas pola tertentu berdasarkan pada
perhitungan jarak Euclidean. Dalam metode ini setiap kelas pola akan diwakili oleh
suatu prototype tunggal yang merupakan nilai rata-rata kelas polanya. Obyek tersebut
akan diklasifikasikan ke dalam kelas yang jarak antara prototype dari setiap kelas dan
obyek yang akan diklasifikasikan tersebut terkecil.
Algoritma Perceptron adalah penglasifikasi lain yang digunakan untuk mencari
suatu vektor bobot yang dapat memisahkan setiap kelas pola secara linear sehingga
sampel-sampel pola pada setiap kelas polanya dapat terklasifikasi dengan tepat.
Minimum distance method is a classifier used to classifier used to classify an
object into a particular class pattern based on Euclidean distance calculation. In this
method, every single pattern would be represented with a single prototype which is an
average score of its class pattern. The object would be classified into a class which
has the shortest distance between prototype from each class and the object itself.
Perceptron algorithm is a another classifier used to find a augmented vector
which able to separate linearly every class pattern and as the result, pattern samples in
every class pattern could be classified correctly.
karunia-Nya sehingga penulis dapat menyelesaikan skripsi ini.
Skripsi ini disusun
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains di Program Studi
Matematika Jurusan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Sanata Dharma Yogyakarta.
Dalam penyusunan skripsi ini hingga selesai, penulis telah banyak mendapat
bantuan dari berbagai pihak berupa bimbingan, pengarahan, dan petunjuk. Untuk itu
pada kesempatan ini perkenankanlah penulis menghaturkan terima kasih yang
sebesar-besarnya kepada pihak yang telah memberikan bantuan ini, antara lain :
1.
Bapak Ir. Ig. Aris Dwiatmoko, M.Sc, selaku Dekan Fakultas MIPA dan juga
dosen pembimbing akademik atas masukan, bimbingan serta dorongan kepada
penulis selama menempuh studi dan menyelesaikan skripsi ini.
2.
Bapak Y.G. Hartono, S.Si, M.Sc selaku Ketua Program Studi Matematika yang
telah memberikan saran, bantuan, bimbingan dan ilmunya dalam bangku kuliah.
3.
Ibu Ch. Enny Murwaningtyas, S.Si, M.Si selaku dosen pembimbing yang telah
dengan sabar membimbing, memberikan arahan, masukan, dan petunjuk kepada
penulis sehingga penulis dapat menyelesaikan skripsi ini.
4.
Segenap Bapak dan Ibu dosen Fakultas MIPA atas segala ilmu, bimbingan dan
perhatian yang diberikan kepada penulis selama ini.
moral maupun materiil dan atas kesabaran dalam mengarahkan
penulis.Adik-adikku Suci dan Sigit yang telah menjadi teman dan adik yang baik. Keluarga
besarku yang senantiasa memberikan dorongan, nasihat dan kehangatan dalam
persaudaraan. Semoga jasa-jasa kalian semua selalu menjadi inspirasi penulis
menuju kesuksesan di masa yang akan datang.
7.
Teman-teman seperjuangan Mat’02 (Rita, Cheea, Deon, Aning, Palm, Wury,
Asih, Nunung, Lia, Bani, Desy) selamat,ya!! Lili, Priska, Sarry, Vida, Lenta, Ijup,
Ika, Archy, Debby, Aan, Taim, Marcus, Tato, Galeh
8.
Teman-teman kosku Linoel, timboel, inem, primtoel, Maria atas keakraban dan
kenyamanannya.
9.
Teman-teman KKN kelompok 1, teman-teman P3W, kakak-kakak serta adik-adik
angkatan atas kebersamaan selama ini.
10. Seseorang yang senantiasa menemaniku dalam suka maupun duka. Semoga Allah
SWT senantiasa membimbing kita.
11. Berbagai pihak yang tidak dapat penulis sebutkan satu persatu, terima kasih atas
segala bantuannya.
Semoga skripsi ini dapat bermanfaat bagi kita semua.
Yogyakarta, Mei 2007
Penulis
HALAMAN PERSETUJUAN PEMBIMBING ………. ii
HALAMAN PENGESAHAN ……… iii
HALAMAN PERSEMBAHAN ………... iv
PERNYATAAN KEASLIAN KARYA ………. v
ABSTRAK ... vi
ABSTRACT ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xiv
DAFTAR LAMPIRAN ... xv
BAB I PENDAHULUAN ... 1
A.
Latar Belakang ... 1
B.
Rumusan Masalah ... 5
C.
Pembatasan Masalah ... 5
D.
TujuanPenulisan ... 6
E.
Manfaat Penulisan ... 6
F.
Metode Penulisan ... 7
G.
Sistematika Penulisan ... 7
C.
Panjang, Jarak dan Keorthogonalan
dalam Ruang Euclidean berdimensi-n ... 11
BAB III METODE JARAK MINIMUM UNTUK KLASIFIKASI POLA ... 19
A.
Pengantar ... 19
B.
Fungsi Pengambilan Keputusan ………. 22
C.
Algoritma Jarak Minimum ………. 28
BAB IV ALGORITMA PERCEPTRON
UNTUK KLASIFIKASI POLA …... 40
A.
Ruang Bobot ………...
40
B.
Pelatihan Perceptron untuk Penglasifikasian Pola ………. 44
1.
Algoritma Perceptron untuk 2 kelas pola ………... 45
2.
Algoritma Perceptron untuk L kelas pola ………... 57
BAB V APLIKASI METODE JARAK MINIMUM DAN
ALGORITMA PERCEPTRON UNTUK KLASIFIKASI POLA …….. 60
A.
Pengantar ……… 60
B.
Aplikasi Metode Jarak Minimum ……….. 62
C.
Aplikasi Algoritma Perceptron ……….. 65
1.
Algoritma Perceptron untuk 2 kelas pola ………... 65
2.
Algoritma Perceptron untuk L kelas pola ………... 68
DAFTAR PUSTAKA ………... 74
LAMPIRAN ………. 75
Tabel Perhitumgan Prototype Setiap kelas ... 34
Tabel Hasil Klasifikasi ... 37
Tabel Data Training Set ……… 37
Tabel Hasil Klasifikasi ... 38
Tabel Klasifikasi Huruf Jawa dengan Metode Jarak Minimum ... 64
Gambar Fungsi Pengambilan Keputusan dengan Tiga Kelas ………... 23
Gambar Fungsi Diskriminan ………. 28
Gambar Prototype Tunggal ……….. 31
Gambar Batas Pengambilan Keputusan dengan Dua
Prototype pada Setiap kelas Pola ……….. 32
Gambar Garis Tegak Lurus ………. 41
Gambar Huruf Jawa ………. 60
Gambar Flowchart Program Klasifikasi dengan Metode Jarak Minimum ……... 63
Gambar Flowchart Program Klasifikasi dengan
Algoritma Perceptron Dua Kelas ……... 67
Gambar Flowchart Program Klasifikasi dengan
Algoritma Perceptron L Kelas ……... 70
Lampiran Program Klasifikasi Contoh 3.2 dengan 3 Kelas 8 Sampel ………….. 79
Lampiran Program untuk Memanggil Huruf Jawa ……… 84
Lampiran Program Aplikasi Metode Jarak Minimum ……….. 96
Lampiran Program Klasifikasi Algoritma Perceptron
Contoh 4.1 dan Contoh 4.2 ……….. 101
Lampiran Program Aplikasi Algoritma Perceptron 2 Kelas Pola ……… 105
Lampiran Program Klasifikasi Algoritma Perceptron Contoh 4.3 ……….. 109
Lampiran Program Aplikasi Algoritma Perceptron L Kelas Pola ……… 118
A. Latar Belakang Masalah
Obyek yang tidak diketahui kelasnya
sensor
ciri obyek yang tampak
Sistem Pengenalan Pola
A B C ( perkiraan kelas )
Diagram 1. Sistem Pengenalan Pola
Input
Sensor
Ekstraksi ciri
Klasifikasi
Kelas
Diagram 2. Sistem Pengenalan Pola
obyek. Pada proses ini obyek dideteksi kemudian diukur sifat-sifat obyek yang
ber-kaitan sebagai ciri. Ekstraksi ciri bertujuan untuk mengkarakterisasi suatu obyek
menggunakan pengukuran numerik. Biasanya satu ciri saja tidak cukup untuk
mem-bedakan antara objek dari kategori yang berbeda. Sehingga perlu untuk mengenali
sebanyak mungkin ciri-ciri yang dimiliki suatu obyek. Ciri-ciri yang dimiliki suatu
obyek akan diabstraksi dalam bentuk vektor yang disebut sebagai vektor ciri.
Kum-pulan dari vektor ciri disebut ruang ciri. Tahap terakhir adalah klasifikasi yang
me-rupakan suatu proses proses pengelompokan obyek ke dalam kelas yang sesuai.
Dalam skripsi ini akan dibahas metode pengenalan pola pada tahap klasifikasi.
Klasifikasi pola bertujuan untuk mengidentifikasi obyek sebagai anggota dari suatu
kelas. Penglasifikasi menggunakan vektor ciri yang diberikan oleh pengekstraksi ciri
untuk memasukkan obyek ke dalam kelas yang sesuai. Penglasifikasi membagi ruang
ciri dari kelas-kelas obyek ke dalam daerah klasifikasi yang berbeda kemudian
me-masukkan obyek tersebut ke dalam daerah klasifikasi yang sesuai.
yaitu
x1= panjang daun bunga dan
= lebar daun bunga. Terdapat kasus
pen-genalan pola yang terdiri atas tiga kelas pola misalkan
2
x
1
C
= kelas bunga mawar
, C2=
kelas bunga dahlia dan
C
3= kelas bunga sepatu. Setiap kelas pola mempunyai ukuran
panjang dan lebar daun bunga yang berbeda-beda. Sehingga untuk
menglasifikasi-kannya maka setiap bunga dalam keranjang tersebut akan diukur panjang dan lebar
daun bunganya. Setelah itu akan dihitung selisih panjang dan lebar daun bunga setiap
bunga dalam keranjang dengan panjang dan lebar daun bunga setiap kelas. Misalkan
suatu bunga ternyata selisih panjang dan lebar daun bunganya dengan kelas
paling
kecil maka bunga tersebut akan dikategorikan sebagai anggota kelas
yaitu kelas
bunga mawar. Dalam proses penglasifikasian bunga di atas digunakan faktor jarak
dalam menghitung selisih panjang dan lebar daun bunga suatu bunga dengan kelas
bunga tertentu.
1
C
1
C
Dalam skripsi akan dibahas penggunaan metode Jarak Minimum untuk
klasifi-kasi pola dan penggunaan algoritma Perceptron. Dengan menggunakan metode Jarak
Minimum maka suatu obyek akan diklasifikasikan ke dalam kelas yang jaraknya
ter-dekat atau terkecil dengan obyek tersebut. Obyek akan diproses melalui tahap-tahap
dalam sistem pengenalan pola di atas. Kemudian akan diperoleh ciri-cirinya dan
diabstraksikan sebagai vektor ciri. Suatu penglasifikasi adalah alat dengan n masukan
dan sebuah keluaran. Setiap input digunakan untuk menginformasikan satu dari n ciri
yaitu
yang diukur dari suatu obyek untuk diklasifikasikan. Suatu
penglasifikasi R akan menghasilkan satu dari R simbol
n
x
x
x
1,
2,....,
R
C
C
C
suatu keluaran, keluaran ini merupakan suatu keputusan tentang kelas dari obyek
yang diklasifikasikan.
Algoritma Perceptron digunakan untuk mencari suatu vektor bobot sembarang
w,
kemudian vektor bobot
w
tersebut digunakan untuk memisahkan dua kelas pola
tersebut secara linear sehingga sampel-sampel pola pada setiap kelas akan
terklasifi-kasi dengan benar.
B. Perumusan Masalah
Pokok permasalahan yang akan dibahas adalah :
1. Bagaimana landasan matematis metode Jarak Minimum untuk klasifikasi pola?
2. Bagaimana klasifikasi pola dilakukan dengan metode Jarak Minimum?
3. Bagaimana landasan matematis algoritma Perceptron digunakan untuk
menglasifikasikan dua kelas pola ?
4.
Bagaimana klasifikasi pola dari dua kelas yang berbeda dilakukan dengan
algo-ritma Perceptron ?
C. Batasan Masalah
D
.
Tujuan Penulisan
Tujuan penulisan skripsi ini adalah :
1. Memahami landasan matematis yang digunakan dalam klasifikasi pola dengan
me-tode Jarak Minimum dan algoritma Perceptron.
2. Membedakan suatu obyek dari obyek lain dengan menentukan kelompok pola ber
dasarkan ciri-ciri yang dimiliki obyek tersebut.
3. Melakukan identifikasi suatu pola yang diamati sebagai anggota dari suatu kelas
pola yang sudah diketahui menggunakan metode Jarak Minimum dan algoritma
Perceptron.
4. Menyelesaikan masalah-masalah pengenalan pola dalam tahap klasifikasi pola
menggunakan metode Jarak Minimum dan algoritma Perceptron.
E. Manfaat Penulisan
Manfaat penulisan skripsi ini adalah :
1. Dapat mengerti landasan matematis yang digunakan dalam metode Jarak Minimum
dan algoritma Perceptron untuk klasifikasi pola.
2.
Dapat mengetahui tahap-tahap klasifikasi pola menggunakan metode Jarak
Mini-mum dan algoritma Perceptron.
F. Metode Penulisan
Metode penulisan yang digunakan dalam skripsi ini adalah metode studi pustaka
dengan mempelajari beberapa bagian materi dari buku yang digunakan sebagai bahan
acuan dan bantuan komputer khususnya program Matlab.
G. Sistematika Penulisan
Pada Bab 1 Pendahuluan, berisi gambaran umum tentang isi skripsi yang
meli-puti latar belakang masalah, perumusan masalah, batasan masalah, tujuan penuli san,
manfaat penulisan, metode penulisan, dan sistematika penulisan.
Pada Bab 2 Landasan Teori, berisi beberapa teori yang mendasari pembahasan
bab berikutnya, yaitu sifat-sifat penjumlahan dan perkalian vektor, Norm Euclidean,
jarak Euclidean, dan pertidaksamaan Cauchy Schwart.
Pada Bab 3 Metode Jarak Minimum untuk Klasifikasi Pola, berisi tentang
peng-antar metode Jarak Minimum, pengambilan keputusan dengan pendekatan jarak
Euclidean. Pembahasan terakhir dari bab ini adalah penggunaan metode Jarak
Mini-mum untuk menglasifikasikan pola.
Pada Bab 5 Aplikasi Metode Jarak Minimum dan Algoritma Perceptron untuk
Klasifikasi Pola, Bab ini menyajikan suatu kasus klasifikasi pola dengan
mengguna-kan metode Jarak Minimum dan algoritma Perceptron.
Pada bab ini akan dibahas teori-teori yang mendasari penggunaan metode Jarak
Minimum untuk klasififkasi pola yaitu :
A. Ruang
Euclidean
Berdimensi-
n
Sub bab ini bertujuan untuk memperkenalkan vektor di ruang Euclidean
berdi-mensi –n.
Definisi 2.1
Himpunan dari semua kumpulan terurut
disebut ruang Euclidean
berdimensi-n dan diberi lambang
.
)
,...,
,
,
(
v
1v
2v
3v
n nℜ
Definisi 2.2
Vektor
v
di
adalah pasangan terurut
dengan
merupakan bilangan real. Ditulis
n
ℜ
(
v
1,
v
2,
v
3,...,
v
n)
n
v
v
v
v
1,
2,
3,...,
v
=
(
v
1,
v
2,
v
3,...
,
v
n)
, nilai-nilai
disebut komponen atau koordinat dari vektor.
n
v
v
v
B. Operasi-operasi dalam Ruang
Euclidean
Berdimensi-
n
Operasi-operasi yang berlaku dalam
ℜnadalah sebagai berikut :
Definisi 2.3
Dua vektor
u
=
(
u
1,
u
2,
...
,
u
n)
dan
v
=
(
v
1,
v
2,
...
,
v
n)
dalam
disebut sama jika
nℜ
)
,...,
,
2 2 11
v
u
v
u
nv
nu
=
=
=
Jumlah
u
+
v
adalah
)
,...,
,
(
u
1+
v
1u
2+
v
2u
n+
v
n=
+
v
u
Jika s sebarang skalar, perkalian skalar s
u
adalah
)
...,
,
,
(
su
1su
2su
ns
u
=
Teorema 2.1
Jika ,
u
=
(
u
1,
u
2,
...
,
u
n)
v
=
(
v
1,
v
2,
...
,
v
n)
dan
w
=
(
w
1,
w
2,
...
,
w
n)
adalah
vektor-vektor dalam
ℜndan r dan s sebarang skalar, maka
Komutatif) (Sifat
(a) u+v=v+u
) Assosiatif (Sifat w v u w v u
(b) +( + )=( + )+
Identitas) (Sifat u 0 u + = (c) elemen) (Invers 0 u u
+(-1) =
(d) if) (Distribut v u v
u ) r r
r(
(e) + = +
u u
u r s
s) (r
u u) (rs) r(s
(g) =
u u)= 1( (h)
C. Panjang, Jarak dan Keorthogonalan dalam Ruang
Euclidean
berdimensi-
n
Selanjutnya akan dibahas tentang gagasan panjang (norm), jarak dan
keorthogonalan vektor-vektor dalam
. Namun, sebelumnya akan didefinisiskan
hasil kali titik dalam ruang Euclidean berdimensi –n sebagai berikut
n
ℜ
Definisi 2.4
Jika dan
u
=
(
u
1,
u
2,
...
,
u
n)
v
=
(
v
1,
v
2,
...
,
v
n)
adalah sebarang vektor dalam
,
maka hasil kali dalam Euclidean
u
·
v
dari dua vektor tersebut didefinisikan sebagai
n
ℜ
n n
v
u
v
u
v
u
+
+
+
=
⋅
v
1 1 2 2...
u
Karena suatu vektor dapat dituliskan dalam bentuk matriks, maka perkalian titik
da-pat dituliskan sebagai
u
·
v = u
tv
Teorema 2.2
Jika
u
,
v
, dan
w
adalah vektor di
ℜndan r sebarang skalar, maka
(c) (r
u
)
·
v
= r(
u
·
v
) ( Homogen )
(d)
u
·
u
0
≥
(e)
u
·
u
= 0 jika dan hanya jika
u
=
0
Dalam
, panjang vektor adalah panjang garis
yang mewakili
vektor itu, dan
jarak diantara vektor
u
dan
v
ialah jarak diantara dua titik yang mewakili kedua
vektor itu. Dengan demikian, panjang dan jarak bagi vektor-vektor dalam
adalah
sebagai berikut :
2
ℜ
n
ℜ
Definisi 2.5
Norm Euclidean dari suatu vektor
u
=
(
u
1,
u
2,
...
,
u
n)
dalam
adalah
n
ℜ
u
=
(u⋅u)12 =u
⋅
u
2 22 2
1
)
(
)
...
(
)
(
u
+
u
+
+
u
n=
2
sehinggau⋅u= u
Definisi 2.6
Jarak Euclidean antara titik-titik
u
=
(
u
1,
u
2,
...
,
u
n)
dan
v
=
(
v
1,
v
2,
...
,
v
n)
dalam
adalah
n
ℜ
d
(
u
,
v
)
=
u
−
v
=
(
u
1−
v
1)
2+
(
u
2−
v
2)
2+
...
+
(
u
n−
v
n)
2∑
=
−
=
ni
i
i
v
u
d
1
2
)
(
Contoh 2. 1
Misalkan
u
= (1, 3, -2, 1) dan
v
= (2, 1, 1, 0), maka
15
)
1
(
)
2
(
)
3
(
)
1
(
2+
2+
−
2+
2=
=
u
6
)
0
(
)
1
(
)
1
(
)
2
(
2+
2+
2+
2=
=
v
dan
( , )= (1−2)2 +(3−1)2 +(−2−1)2 +(1−0)2 = 15
v u
d
■
Teorema 2.3
Ketaksamaan Cauchy-Schwarz dalam
ℜnJika dan
u
=
(
u
1,
u
2,
...
,
u
n)
v
=
(
v
1,
v
2,
...
,
v
n)
adalah vektor-vektor dalam
,
maka
n
ℜ
u
⋅
v
≤
u
v
(1)
atau dinyatakan dalam bentuk komponen-komponen,
(
) (
2 2)
122 2 1 2 1 2 2
2 2 1 2
2 1
1
v
u
v
...
u
nv
nu
u
...
u
nv
v
...
v
nu
+
+
+
≤
+
+
+
+
+
+
Bukti :
Jika
maka kedua ruas di (1) sama dengan nol. Oleh karena itu ketaksamaan
tersebut berlaku. Jika
, untuk setiap bilangan real x, berdasarkan Teorema 2.2
maka nilai
0
u
=
0
u
≠
0 ) (
)
(xu+v ⋅ xu+v ≥
pertidaksamaan (2) merupakan fungsi kuadrat dalam x yang harus selalu nonnegatif.
Artinya fungsi kuadrat tersebut tidak mempunyai akar real yang berbeda. Oleh karena
itu, diskriminannya tidak mungkin positif atau
0
)
(
)
(
4
)
(
4
⋅
2−
⋅
⋅
≤
v
v
u
u
v
u
)
(
)
(
4
)
(
4
u
⋅
v
2≤
u
⋅
u
v
⋅
v
)
(
)
(
)
(
u
⋅
v
2≤
u
⋅
u
v
⋅
v
Berdasarkan Definini norm vektor maka diperoleh
2 2 2
||
||
||
||
)
(
u
⋅
v
≤
u
v
dengan mengambil akar kedua ruas diperoleh
|u⋅v| ≤ ||u||||v||
■
Panjang (Norm) dan jarak dalam ruang Euclidean berdimensi-n memenuhi sifat-sifat
berikut :
Teorema 2.4
Jika
u
,
v
dan
w
adalah vektor-vektor dalam
ℜndan k sebarang skalar, maka
(a)
u
≥
0
(b)
u
=
0
jika
dan
hanya
jika
u
=
0
(c)
k
u
=
k
u
(e)
d(u,v)≥0(f)
d(u,v)=0 jikadan hanya jikau=v(g)
d(u,v)=d(v,u)(h)
d(u,v)≤d(w,u)+d(w,v) (Ketaksamaan Segitiga)Bukti :
(a)
Misalkan ,
u
=
(
u
1,
u
2,
...
,
u
n)
v
=
(
v
1,
v
2,
...
,
v
n)
dan
,
berdasarkan Definisi norm vektor diperoleh
)
,
...
,
,
(
w
1w
2w
n=
w
u
=
2 22 2
1
)
(
)
...
(
)
(
u
+
u
+
+
u
nKarena kuadrat dari bilangan real
≥
0
maka
u
≥
0
(b)
(
⇒
)
Diketahui
u
=
0
, dengan kontradiksi akan dibuktikan
u
=
0
Andaikan
u
≠
0
maka
∃
u
1,...,
u
nyang
tidak
semuanya
=
0
Misal
u
1≠
0
, maka
20
. Sehingga
1
≠
u
u
=
(
)
(
)
2...
(
)
20
2 2
1
+
u
+
+
u
n≠
u
karena kuadrat bilangan real > 0, maka
u
>
0
kontradiksi dengan
u
=
0
.
Jadi
u
=
0
(
⇐
)
Jika
u
=
0
maka
u
k
=
2 2
2 2
1
)
(
)
...
(
)
(
ku
+
ku
+
+
ku
n2 2
2 2
1
)
(
)
...
(
)
(
u
u
u
nk
+
+
+
=
=
k
u
(d) Berdasarkan Definisi norm vektor diperoleh
(
)
( )2
v u v u v
u+ = + ⋅ +
Berdasarkan Teorema 2.2 sifat (b) maka
) ( ) (2
v u v v u u v
u+ = ⋅ + + ⋅ + =(u⋅u)+(u⋅v)+(u⋅v)+(v⋅v)
) ( ) ( 2 )
(u⋅u + u⋅v + v⋅v
=
Berdasarkan Definisi Norm vektor diperoleh
2 v
u+ = u 2 +2(u⋅v)+ v 2
karena
u
⋅
v
≤
u
⋅
v
maka
u+v 2≤ u 2 +2|u⋅v|+ v 2Berdasarkan Ketaksamaan Cauchy-Schawrz
2 v
u+ ≤ u 2 +2u v + v 2
=
(
u
+
v
)
2Dengan mengakarkan kedua ruas diperoleh
v
u
v
u
+
≤
+
(e) Berdasarkan Definisi jarak vektor maka diperoleh
d
(
u
,
v
)
=
u
−
v
=
(
u
1−
v
1)
2+
(
u
2−
v
2)
2+
...
+
(
u
n−
v
n)
2Karenakuadrat bilangan real≥0
maka
d(u,v)≥02 2 2 2 2 1
1
)
(
)
...
(
)
(
)
,
(
u
v
u
v
u
nv
nd
u
v
=
u
−
v
=
−
+
−
+
+
−
d(u,v)≥0
=
0
+
0
+
...
+
0
=
0
(
⇒
)
Diketahui
d(u,v)=0. Dengan kontradiksi akan dibuktikan bahwa
u = v
Andaikan
u
≠
v
,
∃(u1−v1),....,(u2−v2) tidak semuanyasamadengan 0Misal
(
u
1−
v
1)
≠
0
maka
0
)
(
...
)
(
)
(
)
,
(
2 22 2 2 1
1
−
+
−
+
+
−
≠
=
−
=
u
v
u
v
u
nv
nd
u
v
u
v
Kontradiksi dengan
d(u,v)=0. Jadi
u = v
(g)
Jika
u
=
(
u
1,
u
2,
...
,
u
n)
dan
v
=
(
v
1,
v
2,
...
,
v
n)
maka
2 2 2 2 2 1
1
)
(
)
...
(
)
(
)
,
(
u
v
u
v
u
nv
nd
u
v
=
u
−
v
=
−
+
−
+
+
−
Berdasarkan sifat kuadrat bilangan real maka diperoleh
), (u v
d
=
(
v
1−
u
1)
2+
(
v
2−
u
2)
2+
...
+
(
v
n−
u
n)
2=
v
−
u
=d(v,u)(h) Berdasarkan sifat penjumlahan vektor
=
−
=
u
v
v
u
,
)
(
d
(
u
-
w
)
+
(
w
−
v
)
Berdasarkan Definisi norm vektor maka diperoleh
)) ( ) (( )) ( ) (( ) ( )
(u-w + w−v 2 = u−w + w−v ⋅ u-w + w-v
) -( ) ( ) -( ) ( ) ( ) ( ) ( )
(u-w ⋅ u-w + u−w ⋅ w−v + u-w ⋅ w v + w-v ⋅ w v
= ) -( ) ( ) -( ) ( 2 ) ( )
(u-w ⋅ u-w + u-w ⋅ w v + w-v ⋅ w v
=
2
)
(
)
(
u
-
w
+
w
−
v
= u-w 2 +2(u-w)⋅(w-v)+ w-v 2Berdasarkan sifat nilai mutlak
u
⋅
v
≤
u
⋅
v
maka
2
) ( )
(u-w + w−v ≤ u-w 2 +2|(u-w) .(w-v)|+w-v 2
Berdasarkan Ketaksamaan Cauchy-Schawrz
(u-w)+(w−v)2 ≤ u-w 2 +2u-w w-v + w-v 2
=
(
u
-
w
+
w
-
v
)
2Dengan mengakarkan kedua ruas maka diperoleh
)
(
)
(
u
-
w
+
w
−
v
≤
u
-
w
+
w
-
v
d(u,v)≤d(u−w)+d(w−v)
■
Definisi 2.7
A. Pengantar
Klasifikasi pola adalah pengelompokan suatu obyek yang tidak diketahui ke
dalam suatu kelas pola yang diketahui. Pengambilan keputusan adalah penentuan
suatu obyek untuk dikategorikan ke dalam suatu kelas pola yang sesuai.
Penglasifikasi Jarak Minimum digunakan untuk menglasifikasikan suatu pola yang
tak diketahui ke dalam suatu kelas yang jarak antara suatu pola dan kelas pola
tertentu minimum. Penglasifikasian pola dengan metode jarak minimum meng-
gunakan konsep jarak Euclidean. Dalam hal ini kita akan menghitung jarak antara
dua vektor yaitu vektor dari pola yang tidak diketahui dan vektor dari kelas pola
tertentu yang telah diketahui.
Dalam pengenalan pola, ciri-ciri yang tampak dari suatu obyek disebut dengan
istilah pola. Jadi, pola adalah ukuran kuantitatif dari suatu obyek. Kelas pola adalah
kumpulan pola-pola yang memiliki beberapa sifat umum. Jika terdapat suatu
pengenalan pola dengan L kelas pola maka kelas-kelas pola dinotasikan sebagai
dengan
i
C
L
i
≤
≤
1
.
Irisan dari tiap-tiap kelas pola adalah himpunan kosong yang
dinotasikan dengan
Φ =
j
i C
C I
jika
i
≠
j
Gabungan dari L kelas pola tersebut adalah ruang pola berdimensi n (
) yang
dinotasikan dengan
n
n i L i
C
=
ℜ
∩
≤≤1
Di bawah ini ditunjukan konsep dari suatu penglasifikasi jarak minimum untuk
menglasifikasikan suatu obyek ke dalam kelas yang sesuai yang terdiri dari tiga kelas
pola yaitu
, Jarak obyek ke dalam kelas pola tertentu dinotasikan
dengan . Setiap kelas pola dipisahkan oleh suatu garis yang
disebut batas keputusan.
3 2
1
,
C
,
dan
C
C
3
1
dengan
≤
i
≤
dC
iData yang tak
diketahui
Jarak minimum ke
kelas
Cdiklasifikasi
kan ke kelas
C2
2
Gambar 3.1 Konsep penglasifikasi Jarak Minimum
Sebelum menglasifikasikan suatu obyek harus dikenali dulu ciri-ciri yang
tam-pak dari obyek tersebut. Satu ciri saja tidak cukup untuk membedakan obyek dari
ke-las yang berbeda sehingga perlu untuk mengenali ciri-ciri dari suatu obyek sebanyak
mungkin. Ciri-ciri obyek tersebut ditulis sebagai vektor ciri. Nilai-nilai dari vektor
ciri diukur dari sampel-sampel yang digunakan dalam masing-masing kelas pola yang
Kelas
C
3∗
Kelas
C1d
C1Batas keputusan
Kelas
C2Jarak kelas
C2dan data
yang tak diketahui
Rata-rata kelas
C2d
C2disebut sampel pola. Sampel pola dari masing-masing kelas pola berbeda-beda, kelas
mempunyai sampel pola sebanyak
.
i
C
M
iJika terdapat suatu obyek
x
yang akan diklasifikasikan mempunyai ciri
sebanyak
n, maka vektor cirinya
adalah vektor kolom berdimensi n. Vektor ciri
tersebut dinotasikan dengan
(3.1)
i j i
C
∈
.
x
dengan
1≤i≤Ldan
1
≤
j
≤
M
i. Vektor ciri
adalah elemen-elemen dari ruang
pola
, sehingga
mempunyai n elemen yang dinotasikan sebagai
dengan
.
j i.
x
n
ℜ
i.jx
ijk
x
. nk ≤ ≤ 1
Misalkan dalam suatu keranjang bunga terdapat tiga jenis bunga yaitu bunga
mawar, bunga dahlia dan bunga sepatu. Setiap bunga dalam keranjang akan
diklasifikasikan sesuai dengan kelasnya berdasarkan ciri-ciri yang dimiliki oleh setiap
bunga. Sedangkan ciri-ciri yang diamati adalah panjang dan lebar daun bunganya.
Jadi penglasifikasian setiap bunga dalam keranjang tersebut didasarkan pada panjang
dan lebar daun bunga dari masing-masing bunga tersebut.
Dalam penglasifikasian bunga di atas, terdapat tiga kelas pola yaitu
= kelas
bunga mawar
1
C
, C2
= kelas bunga dahlia dan
= kelas bunga sepatu. Sedangkan
ciri-ciri yang diamati adalah panjang dan lebar daun bunganya, maka vektor ciri-ciri
x
berdimensi dua (n = 2) atau
3
C
) , (x1 x2
=
x
dengan
= panjang daun bunga dan
=
lebar daun bunga. Dengan demikian, suatu bunga akan diklasifikasikan ke dalam
1
kelas bunga yang sesuai berdasarkan pada ukuran panjang dan ukuran lebar daun
bu-nganya.
B. Fungsi Pengambilan Keputusan
Sistem pengenalan pola adalah suatu sistem yang mengambil sampel baru
x
*
yang tak diketahui klasifikasinya untuk dikelompokkan ke dalam suatu kelas pola
berdasarkan pada beberapa aturan pengambilan keputusan. Suatu aturan
pengambilan keputusan ini diperoleh dari pemartisian ruang pola ke dalam beberapa
daerah terpisah yang sesuai dengan kelas
. Setiap kelas
dipisahkan oleh suatu
kurva yang disebut sebagai batas pengambilan keputusan berdimensi (n-1).
i
C
)
1
(
≤
i
≤
L
i
C
C
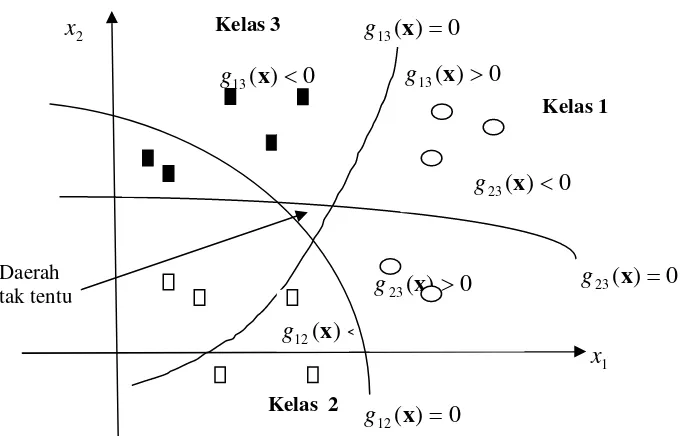
iKelas 3
0
)
(
13
x
<
g
g
13(
x
)
>
0
Kelas 1
g
23(
x
)
<
0
0
)
(
13
x
=
g
0
)
(
23
x
>
g
g
23(
x
)
=
0
0 ) (
12 x =
g
) (
12 x <
g
Kelas 2
1
x
2
x
Daerah tak tentu
Gambar 3.2 Fungsi pengambilan keputusan dengan tiga kelas
Definisi 3.1
Jika
adalah suatu fungsi pengambilan keputusan yang didefinisikan pada
ruang pola yang bernilai real, dengan kelas-i dan kelas-j berada dalam sisi yang
berlawanan dari suatu hipersurface tersebut maka
)
(
x
ij
g
0
)
(
x
=
ij
g
(3.2)
Definisi 3. 2
Suatu pola yang tak dikenali
x
* akan diklasifikasikan ke dalam kelas ke-i berdasarkan
pada suatu fungsi pengambilan keputusan
g
ij(
x
)
sebagai berikut
Jika
x
* berada dalam kelas ke-j maka
x
*
∈
{
x
:
g
ij(
x
)
<
0
}
(3.4)
Dari Definisi 3.2 dapat disimpulkan bahwa suatu pola yang tak diketahui
(x
*) akan
diklasifikasikan ke dalam kelas ke-i jika
dan akan diklasifikasikan ke
dalam kelas ke-j jika
0
*)
(
x
>
ij
g
0
*)
(
x
<
ij
g
Teorema 3. 1
Jika
g
ij(
x
)
dan
g
ji(
x
)
adalah suatu fungsi pengambilan keputusan, maka
)
(
)
(
x
jix
ij
g
g
=
−
bukti :
Jika adalah fungsi pengambilan keputusan maka berdasarkan Definisi 3.2
diperoleh :
)
(
x
ijg
⎭ ⎬ ⎫ < ∈ > ∈ 0 ) ( maka Jika 0 ) ( maka Jika x x x x ij j ij i g C g C(i)
Jika adalah fungsi pengambilan keputusan maka berdasarkan Definisi 3.2
diperoleh :
)
(
x
jig
⎭ ⎬ ⎫ > ∈ < ∈ 0 ) ( maka Jika 0 ) ( maka Jika x x x x ji j ji i g C g C(ii)
Berdasarkan persamaan (i) dan (ii) diperoleh
Jika
x
∈
C
imaka
g
ij(
x
)
>
0
dan
g
ji(
x
)
<
0
atau
dan
,
sehingga
0
)
(
x
>
ij
)
(
)
(
x
jix
ij
g
g
=
−
▄
Definisi 3. 3
Misalkan
adalah ruang pola dan { 1, 2, …., L } himpunan kelas pola. Suatu
fungsi penyeleksi c(
x
) adalah suatu pemetaan c :
{1, 2, …., L} adalah suatu
cara yang mengaitkan setiap unsur di
dengan satu unsur dalam himpunan bulat
positif 1, 2, …., L, sedemikian sehingga
n
ℜ
⎯→
⎯
ℜ
nn
ℜ
Jika
x
berada dalam kelas ke-i maka
c
(
x
)
=
i
Berdasarkan pada Definisi 3.2 dan Definisi 3.3 jika
x
berada dalam kelas ke-i maka
fungsi penyeleksi c(
x
) menjadi
Jika maka
g
ij(
x
)
>
0
c
(
x
)
=
i
,
∀
j
,
i
≠
j
(3.5)
Jika terdapat pengenalan pola dengan tiga kelas maka berdasarkan persamaan
(3.5) aturan penglasifikasiannya adalah
1.
Suatu pola yang tak diketahui (
x*
) akan diklasifikasikan menjadi anggota
kelas ke-1, maka fungsi penyeleksi c(
x
) untuk kelas ke-1 sebagai berikut
i. Batas pengambilan keputusan yang memisahkan kelas 1 dan kelas 2 adalah
g12
(
x
*) > 0.
ii. Batas pengambilan keputusan yang memisahkan kelas 1 dan kelas 3 adalah
g
13(
x
*) > 0.
Jika
g12(
x
*) > 0,
g
13(
x
*) > 0 maka
c
(
x*
)
=
1
(3.6)
2.
Suatu pola yang tak diketahui (
x*
) akan diklasifikasikan menjadi anggota
ke-las ke-2, maka fungsi penyeleksi c(
x
) untuk kelas ke-2 sebagai berikut
i. Batas pengambilan keputusan yang memisahkan kelas 2 dan kelas 1 adalah
g12
(
x
*) < 0 atau
g21(
x
*) > 0.
ii. Batas pengambilan keputusan yang memisahkan kelas 2 dan kelas 3 adalah
g
23(
x
*) > 0.
Sehingga dapat ditulis sebagai berikut
Jika
g12(
x
*) < 0,
g
23(
x
*) > 0 maka
c
(
x*
)
=
2
(3.7)
3.
Suatu pola yang tak diketahui (
x*
) akan diklasifikasikan menjadi anggota
ke-las ke-2, maka fungsi penyeleksi c(
x
) untuk kelas ke-2 sebagai berikut
i. Batas pengambilan keputusan yang memisahkan kelas 3 dan kelas 1 adalah
g
13(
x
*) < 0 atau
g
31(
x
*) > 0.
ii. Batas pengambilan keputusan yang memisahkan kelas 3 dan kelas 2 adalah
g
23(
x
*) < 0 atau
g
32(
x
*) > 0.
Sehingga dapat ditulis sebagai berikut
Jika
g
13(
x
*) < 0,
g
23(
x
*) < 0 maka
c
(
x*
)
=
3
(3.8)
⎪
⎪
⎩
⎪⎪
⎨
⎧
>
<
>
<
>
>
<
>
>
=
)
0
)
(
atau
(
0
)
(
),
0
)
(
atau
(
0
)
(
jika
3
0
)
(
),
0
)
(
atau
(
0
)
(
jika
2
0
)
(
,
0
)
(
jika
1
)
(
32 23 31 13 23 21 12 12 13x
x
x
x
x
x
x
x
x
x
g
g
g
g
g
g
g
g
g
c
Fungsi pengambilan keputusan
memisahkan dua kelas yang berbeda yaitu
kelas ke-i dan kelas ke-j. Berdasarkan Teorema 3.1 diketahui bahwa
sehingga banyaknya pilihan fungsi pengambilan keputusan untuk memisahkan L
kelas pola dapat dihitung menggunakan rumus kombinasi yaitu kombinasi 2 yang
diambil dari L berbeda adalah
)
(
x
ijg
)
(
)
(
x
jix
ij
g
g
=
−
L
C
2Δ
2
)
1
(
!
2
)!
2
(
)!
2
)(
1
(
!
2
)!
2
(
!
=
−
−
−
−
=
−
L
L
L
L
l
L
L
L
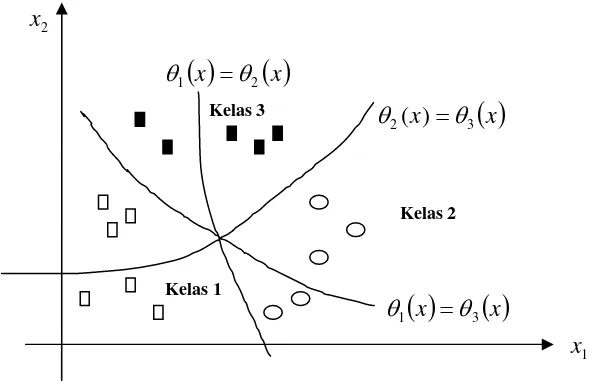
Dalam Gambar 3.2, terdapat suatu daerah tak tentu sehingga fungsi pengambilan
keputusan pada Definisi 3.2 tidak dapat digunakan untuk menglasifikasikan sampel.
Namun, masalah ini dapat diselesaikan menggunakan fungsi diskriminan dengan cara
menuliskan setiap
g
ijdalam bentuk sebagai berikut :
)
(
x
ij
g
=
θ
i(
x
) -
θ
j(
x
) (3.9)
Fungsi
θ
iyang didefinisikan sebagai fungsi pengambilan keputusan
dalam
persamaan (3.9) di atas disebut sebagai fungsi diskriminan. Dengan demikian, fungsi
penyeleksi dalam pernyataan (3.5) menjadi :
ij
g
jika
θ
i(
x
) -
θ
j(
x
) > 0 maka
c
(
x
)
=
i
atau
Dengan menggunakan fungsi diskriminan maka Gambar 3.2 di atas akan tampak
sebagai berikut :
( )
x 2( )
x1
θ
θ
=( )
x
x
32
(
)
θ
θ
=
( )
x
3( )
x
1
θ
θ
=
1
x
2
x
Kelas 2
Kelas 1 Kelas 3
Gambar 3.3 Fungsi diskriminan
C. Algoritma Jarak Minimum
Misalkan banyaknya sampel pola pada setiap kelas pola adalah
dan
sampel-sampel pola kelas ke-i ditulis
dengan
i
M
j i.
x
1
≤
j
≤
M
i. Dalam metode jarak minimum
suatu sampel pola baru yang tak diketahui
x
akan diklasifikasikan ke dalam kelas pola
yang terdiri dari sampel-sampel pola yang diketahui
. Sampel pola baru tersebut
akan diklasifikasikan ke dalam kelas yang jarak antara sampel pola baru (
x
) dan
sam-pel-sampel pola pada setiap kelas polanya (
) paling kecil atau jaraknya terdekat.
j i.
x
j i.
x
Definisi 3. 4
)
(
x
i
θ
=
min
(
,
i.j)
(3.11)
j
d
x
x
−
dengan
1
≤
j
≤
M
idan
M
iadalah ukuran sampel kelas ke-i.
Dalam penglasifikasi jarak minimum d dihitung menggunakan rumus jarak Euclidean
yaitu
)
,
(
x
y
d
= ||
x
-
y
|| =
21
1
2
) (
⎭ ⎬ ⎫ ⎩
⎨
⎧
∑
−=
n
k
k
k y
x
(3.12)
Jika terdapat sampel pola baru
x
tak diketahui yang mempunyai n ciri atau ruang
pola berdimensi-n (
) dengan banyaknya kelas pola adalah L dan setiap kelas pola
diwakili oleh sampel tunggal yaitu
dengan
n
ℜ
i
x
1≤i≤Lyang disebut suatu prototype,
maka fungsi diskriminan yang digunakan dalam penglasifikasi jarak minimum adalah
sebagai berikut
)
(
x
i
θ
=
(
,
i)
(3.13)
d
x
x
−
dengan
(
,
i)
d
x
x
21
1
2
)
(
⎭
⎬
⎫
⎩
⎨
⎧
−
=
∑
=
n
k
i k
k
x
x
(3.14)
Fungsi penyeleksi untuk kelas ke-i dalam pernyataan (3.10) menjadi
i
c
(
x
)
=
jika
(
,
i)
>
(3.15)
d
x
x
−
(
,
j)
d
x
x
−
atau
i
c
(
x
)
=
jika
(
,
i)
<
(3.16)
d
x
x
(
,
j)
Dengan mensubstitusikan pernyataan (3.15) ke pernyataan (3.16) maka fungsi
penyeleksi kelas ke-i adalah
i
c
(
x
)
=
jika
21 1 2 ) ( ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ −
∑
= n k i k k xx
<
21 1 2 ) ( ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ −
∑
= n k j k k xx
(3.17)
i
c
(
x
)
=
jika
∑
<
=
−
n k i k kx
x
1 2)
(
∑
=−
n k j k kx
x
1 2)
(
∀
i
≠
j
(3.18)
Berdasarkan pernyataan (3.18) ketentuan untuk mencari fungsi peyeleksi kelas ke-i
adalah sebagai berikut
∑
∑
=−
n k i k kx
x
1 2)
(
<
=−
n k j k kx
x
1 2)
(
)
)
(
2
)
((
2 1 2 i k i k k n kk
x
x
x
x
−
+
∑
=
<
∑
((
)
2−
2
+
(
j)
2)
k j k k
k
x
x
x
x
2 1 1 2 1)
(
2
)
(
∑
∑
∑
= = =+
−
n k i k n k i k k n kk
x
x
x
x
<
21 1 2 1
)
(
2
)
(
∑
∑
∑
= = =+
−
n k j k n k j k k n kk
x
x
x
x
2 1 1)
(
2
∑
∑
= =
+
−
n k i k n k i kk
x
x
x
<
21 1
)
(
2
∑
∑
= =
+
−
n k j k n k j kk
x
x
x
Jika kedua ruas dikalikan
2
1
−
maka persamaan menjadi
2 1 1
)
(
2
1
∑
∑
= =−
n k i k n k i kk
x
x
x
>
21 1
)
(
2
1
∑
∑
= =−
n k j k n k j kk
x
x
x
Jadi fungsi penyeleksi dalam pernyataan (3.18) menjadi
i
c
(
x
)
=
jika
21 1
)
(
2
1
∑
∑
= =−
n k i k n k i kk
x
x
x
>
21 1
)
(
2
1
∑
∑
= =−
n k j k n k j kk
x
x
x
(3.19)
)
(
*
x
i
θ
=
∑
∑
= =
−
nk i k n
k i k
k
x
x
x
1 2 1
)
(
2
1
(3.20)
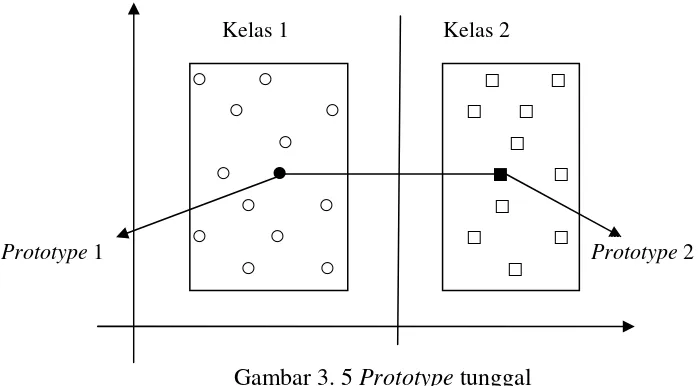
Salah satu cara untuk memperoleh suatu prototype tunggal dari suatu himpunan
sampel dari suatu kelas pola adalah dengan menentukan nilai rata-rata dari setiap
kelas pola. Di bawah ini ditunjukkan gambar penentuan prototype tunggal dari dua
kelas pola
○
○
○
○
○
○
●
○
○
○
○
○
○
□
□
□
□
□
■
□
□
□
□
□
Kelas 1 Kelas 2
Prototype 1 Prototype 2
Gambar 3. 5 Prototype tunggal
Jika jumlah prototype yang mewakili setiap kelas lebih dari satu atau sebanyak
maka
adalah prototype dari kelas ke-i dengan
i
N
x
i.l1
≤
l
≤
N
i. Fungsi diskriminan
yang digunakan dalam penglasifikasi jarak minimum adalah sebagai berikut
), ( min )
( i.l
l
i x =− d x x
θ
(3.21)
Jika dilihat sekilas maka pernyataan (3.21) hampir sama dengan persamaan (3.11)
namun kedua persamaan tersebut sesungguhnya berbeda karena pada persamaan
(3.11) banyaknya sampel pola pada setiap kelas pola adalah
dan sampel-sampel
pola kelas ke-i ditulis
dengan
i
M
l i.
banyaknya prototype pada setiap kelas pola adalah
dan sampel-sampel pola kelas
ke-i ditulis
dengan
i
N
l i.
x
1
≤
l
≤
N
idengan
N
i≤
. Karena mungkin tidak semua
sampel pola yang terdapat pada setiap kelas digunakan sebagai prototype kelas
polanya. Di bawah ini akan ditunjukan batas pengambilan keputusan dari dua kelas
pola dengan masing-masing kelas pola diwakili oleh dua prototype
i
M
□
□
■
□
□
□
○
○
●
○
○
○
○
○
○
○
○
●
○
○
○
○
□ □
□ ■ □ □ Kelas 2
Kelas 1
Kelas 1
Kelas 2
Gambar 3.6 Batas pengambilan keputusan dengan
dua prototype pada setiap kelas pola
Jarak Euclidean dari
x
dan
i.ldengan
x
1
≤
l
≤
N
iadalah
(
,
i.l)
=
d
x
x
i.l 2 xx−
=
(
i.l)
t(
i.l)
x
x
x
x
−
−
(
,
i.l)
=
d
x
x
t i.l t t i.l i.l t i.l)
(
)
(
x
x
x
x
x
x
x
x
−
−
+
(
,
i.l)
=
(3.22)
d
x
x
t i.l t i.l t i.l)
(
)
(
2
x
x
x
x
x
x
−
+
Fungsi penyeleksi untuk kelas ke-i adalah
i
c
(
x
)
=
jika
min
(
,
i.l)
>
d
x
x
−
min
(
,
j.l)
d
x
x
atau
i
c
(
x
)
=
jika
min
(
,
i.l)
<
(3.23)
d
x
x
min
(
,
j.l)
d
x
x
Dengan mensubstitusikan persamaan (3.22) ke persamaan (3.23) maka fungsi
penye-leksi kelas ke-i adalah
i
c
(
x
)
=
jika
}
)
(
)
(
2
{
min
t i.l t i.l t i.lx
x
x
x
x
x
−
+
<
min
{
t2
(
j.l)
t(
i.l)
t j.l}
(3.24)
x
x
x
x
x
x
−
+
Berdasarkan pernyataan (3.24) ketentuan untuk mencari fungsi peyeleksi kelas ke-i
adalah sebagai berikut
min
{
2
(
i.l)
t(
i.l)
t i.l}
<
(3.25)
x
x
x
x
+
−
min
{
2
(
j.l)
t(
i.l)
t j.l}
x
x
x
x
+
−
Jika kedua ruas dikalikan dengan
−
1
2
maka pernyataan (3.25) menjadi
}
)
(
2
1
)
(
{
max
i.l t i.l t i.lx
x
x
x
−
>
(
)
}
2
1
)
(
{
max
j.l t i.l t j.lx
x
x
x
−
(3.26)
Jadi fungsi penyeleksi dalam pernyataan (3.18) menjadi
i
c
(
x
)
=
jika
(
)
}
2
1
)
(
{
max
i.l t i.l t i.lx
x
x
x
−
>
(
)
}
2
1
)
(
{
max
j.l t i.l t j.lx
x
x
x
−
(3.27)
sehingga berdasarkan persamaan (3.22) fungsi diskriminan menjadi
)
(
* *x
iθ
=
(
)
}
2
1
)
(
{
max
i.l t i.l t i.lx
x
x
x
−
dengan
1
≤
l
≤
N
i(3.28)
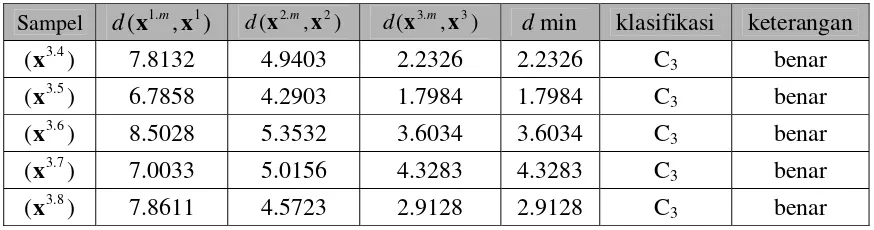
Contoh 3.1
rikan dalam tabel di bawah :
C
1C
2Sampel
X
1X
2X
1X
21 2
1
4
3
2 2
2
4
4
3 1
0
3
5
4 0
2
2
4
5 3
1
1
6
Tabel 3.1 Data Training Set
Berdasarkan Metode Jarak Minimum maka akan dicari prototype
untuk setiap
kelas yaitu dengan menghitung nilai rata-rata sampel dalam setiap ciri dari
masing-masing kelas.
Hasil perhitungan prototype untuk setiap kelas diberikan dalam tabel
berikut :
C
1C
2Sampel
X
1X
2X
1X
21 2
1
4
3
2 2
2
4
4
3 1
0
3
5
4 0
2
2
4
5 3
1
1
6
Rata-rata 1.6 1.2 2.8 4.4
Tabel 3.2 Perhitungan Prototype setiap kelas
Selanjutnya akan dihitung jarak setiap sampel dengan prototype setiap kelas dengan
rumus sebagai
)
,
(
id
x
x
21
1
2
)
(
⎭
⎬
⎫
⎩
⎨
⎧
−
=
∑
=
n
k
i k
k
x
x
jarak kelas ke-1 sampel ke-1 dengan prototype kelas ke-1 adalah
4472
.
0
)
2
.
1
1
(
)
6
.
1
2
(
)
,
(
x
1.1x
1=
−
2+
−
2=
d
jarak kelas ke-1 sampel ke-1 dengan prototype kelas ke-2 adalah
4928
.
3
)
4
.
4
1
(
)
8
.
2
2
(
)
,
(
x
1.1x
2=
−
2+
−
2=
d
jarak kelas ke-1 sampel ke-2 dengan prototype kelas ke-1 adalah
8944
.
0
)
2
.
1
2
(
)
6
.
1
2
(
)
,
(
x
1.2x
1=
−
2+
−
2=
d
jarak kelas ke-1 sampel ke-2 dengan prototype kelas ke-2 adalah
5298
.
2
)
4
.
4
2
(
)
8
.
2
2
(
)
,
(
x
1.2x
2=
−
2+
−
2=
d
jarak kelas ke-1 sampel ke-3 dengan prototype kelas ke-1 adalah
3416
.
1
)
2
.
1
0
(
)
6
.
1
1
(
)
,
(
1.3 1=
−
2+
−
2=
x
x
d
jarak kelas ke-1 sampel ke-3 dengan prototype kelas ke-2 adalah
7539
.
4
)
4
.
4
0
(
)
8
.
2
1
(
)
,
(
1.3 2=
−
2+
−
2=
x
x
d
jarak kelas ke-1 sampel ke-4 dengan prototype kelas ke-1 adalah
7889
.
1
)
2
.
1
2
(
)
6
.
1
0
(
)
,
(
x
1.4x
1=
�