Desain dan Implmentasi Color Code untuk Verifikasi
Nomor Kendaraan Bermotor pada Sistem Parkir
Noerdityo Iswanto1), Koredianto Usman2) Ledya Novamizanti3) Program Studi Telekomunikasi, Institut Teknologi Telkom
Jl. Telekomunikasi No. 1, Bandung, 40257 Telp : (022) 7564108, Fax : (022) 7562721
E-mail : [email protected]), [email protected]), [email protected])
Abstrak
Dengan meningkatnya faktor keamanan, maka diperlukan penggunaan sistem parkir. Model sistem parkir telah banyak mengalami perkembangan. Pada penelitian ini, peneliti mengusulkan metode baru untuk verifikasi nomor kendaraan bermotor pada parking system, dengan menggunakan color Code. Color code merupakan 2D color code matrix yang terdiri dari blok warna berukuran 3 x 3. Terdapat 4 warna yang digunakan, yaitu hitam, merah, biru, dan hijau, sehingga didapatkan konfigurasi color code sebanyak 49 = 262.144 kombinasi warna. Pertama dilakukan proses mengenali warna pada color code. Pada proses ini digunakan metode deteksi berdasarkan evaluasi pada komponen ycbcr dari warna color code. Kemudian dibuat sensor warna dan sensor background supaya penempatan posisi color code tepat dan terbaca dengan benar. Setiap sensor warna akan mensampling komponen ycbcr untuk mengenali tiap warnanya. Selanjutnya dilakukan proses pencarian posisi plat nomor kendaraan. Metode yang digunakan untuk pengenalan karakter yaitu K-Nearest neighbor (KNN). Pengujian dilakukan dengan 3 skenario outdoor, antara lain: uji coba pencarian plat nomor kendaraan bermotor pada kondisi pagi, siang, dan sore hari.
Kata Kunci: color code, verifikasi, tanda nomor kendaraan bermotor, sistem parkir, K-Nearest neighbor
I. PENDAHULUAN
Kendaraan bermotor adalah salah satu penunjang kegiatan manusia yang sangat penting, karena itu tidak heran dari tahun ke tahun pengguna kendaraan bermotor semakin banyak. Data Dinas Perhubungan DKI Jakarta tahun 2002-2007 menunjukkan, jumlah kendaraan pribadi di Jakarta bertambah 1.117 per hari atau 9 persen per tahun. Sedangkan pertumbuhan luas jalan relatif tetap, sekitar 0,01 persen per tahun (vivanews.com, 2009). Mobilitas manusia yang semakin tinggi membuat fenomena ini semakin terlihat. Namun hal ini juga diikuti dengan semakin banyaknya pencurian terhadap kendaraan bermotor tersebut. Data Kepolisian Daerah Metro Jaya, pencurian kendaraan roda dua sejak Januari hingga Juni 2010 mencapai 4.575 kasus. Padahal tahun 2009, angka pencurian kendaraan bermotor hanya 4.123 kasus. Peningkatannya mencapai 9,67%. Sementara untuk roda empat yang raib mencapai 813 unit atau lebih banyak 37 unit dibandingkan pertengahan tahun 2009 yang hanya 776 unit(detiknews.com, 2010).
Karena meningkatnya faktor keamanan, maka diperlukan penggunaan sistem parkir. Model sistem parkir telah banyak mengalami perkembangan. Dimulai dari sistem parkir berbasiskan karcis parkir sekali pakai, RFID, sampai dengan penggunaan kartu parkir. Penggunaan Color Code dalam penelitian ini sebagai sistem pendataan parkir, yang memuat identitas pemilik kendaraan bermotor. Color code merupakan kode warna 2 dimensi yang terdiri dari blok warna berukuran 3 x 3. Terdapat 4 warna yang digunakan, yaitu hitam, merah, biru, dan hijau, sehingga didapatkan konfigurasi color code sebanyak 49 = 262.144 kombinasi warna.
Pertama, dilakukan proses mengenali warna pada color code. Pada proses ini digunakan metode deteksi berdasarkan evaluasi pada komponen YCbCr dari warna color code. Kemudian dibuat sensor warna dan sensor background supaya penempatan posisi color code tepat dan terbaca dengan benar. Setiap sensor warna akan mensampling komponen YCbCr untuk mengenali tiap warnanya. Selanjutnya dilakukan proses pencarian posisi plat nomor kendaraan. Metode yang digunakan untuk pengenalan karakter yaitu K-Nearest neighbor (KNN).
II. LANDASAN TEORI A. Citra
Citra terdiri dari 2 macam: citra kontinu dan citra diskrit. Citra kontinu dihasilkan dari sistem optik yang menerima sinyal analog, seperti mata. Citra diskrit dihasilkan melalui proses digitalisasi terhadap citra kontinu. Beberapa sistem optik dilengkapi dengan fungsi digitalisasi sehingga mampu menghasilkan citra diskrit, misalnya kamera digital. Citra diskrit inilah yang disebut citra digital.
Citra yang merupakan gambar pada bidang dua dimensi, secara matematis, adalah fungsi kontinu dari intensitas cahaya pada bidang dua dimensi. Citra digital biasanya berbentuk persegi panjang dengan dimensi ukuran yang dinyatakan sebagai panjang (M) x lebar (N) dengan derajat keabuan f(x,y), dapat dinyatakan dalam matriks sebagai berikut:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − = ) 1 , 1 ( ... ) 1 , 1 ( ) 0 , 1 ( . . . ) 1 , 1 ( ... ) 1 , 1 ( ) 0 , 1 ( ) 1 , 0 ( ... ) 1 , 0 ( ) 0 , 0 ( ) , ( M N f N f N f M f f f M f f f y x f ` (1) B. Color Code
Color code adalah sejumlah kode yang mewakili angka – angka tertentu yang telah disepakati sebelumnya.
Gambar 2. color code
Color code merupakan kode warna 2 dimensi, yang terdiri dari blok warna berukuran 3 x 3. Didalam color code terdapat 4 macam warna yang digunakan yaitu hitam, merah, biru, dan hijau sedangkan backgroundnya menggunakan warna putih, sehingga didapatkan konfigurasi color code sebanyak 49 = 262.144 kemungkinan kombinasi warna.
C. K-Nearest Neighbor
Algoritma KNN adalah suatu metode untuk melakukan klasifikasi terhadap objek berdasarkan data pembelajaran yang jaraknya paling dekat dengan objek tersebut.
Data pembelajaran diproyeksikan ke ruang berdimensi banyak, dimana masing-masing dimensi merepresentasikan fitur dari data. Ruang ini dibagi menjadi bagian-bagian berdasarkan klasifikasi data pembelajaran. Sebuah titik dari ruang ini disebut c jika kelas c merupakan klasifikasi yang paling banyak ditemui pada k buah tetangga terdekat titik tersebut. Dekat atau jauhnya tetangga biasanya dihitung berdasarkan jarak Euclidean.
III. METODE PENELITIAN
Secara umum sistem verifikasi plat nomor kendaraan dengan database dapat dijelaskan oleh blok diagram berikut:
Akuisisi Preprocessing Identifikasi KNN Bandingkan
dengan database
Gambar 3. Blok diagram sistem verifikasi nomor kendaraan bermotor
A. Akuisisi Citra
Proses akuisisi citra merupakan proses pengambilan (capturing) citra dari suatu objek, yang mana dalam sistem ini pada pembacaan color code dan peng-captur-an kendaraan. Pada pembacaan user tag color code menggunakan webcam SOMC dengan resolusi 10 mega pixel. Jarak antara webcam dan kartu color code yang akan di capture adalah 12 cm. Alat yang digunakan sebagai tempat kartu dimasukkan terbuat dari akrilik hitam dengan panjang landasan untuk tempat webcam 25 cm, lebar 12 cm, tinggi 10 cm dan ketebalan 2 mm. Alat ini ditambah dengan 8 buah led yang berfungsi sebagai
penerangan. Jarak antara kartu dan webcam sejauh 12 cm. Alat ini dibuat agar posisi user tag tepat pada sensor warna dan sensor background. Sehingga proses sampling warna pada color code matrix menjadi lebih mudah dan tidak diperlukan kalibrasi yang berulang – ulang karena tidak tergantung pada kondisi cahaya luar.
Gambar 4. Tempat Capture
Selain akuisisi pada pembacaan color code, akuisisi juga
dilakukan pada peng-captur-an kendaraan. Dalam
pengambilan gambar kendaraan dilakukan dengan menggunakan webcam Logitech Pro 9000 dengan resolusi 960 x 720 pixel. Jarak antara webcam dan kendaraan berbeda – beda. Untuk jarak pengambilan gambar sepeda motor, antara webcam dengan sepeda motor berjarak rata – rata 130 cm karena terdapat peng-captur-an yang lebih jauh. Jarak 130 cm adalah jarak yang terbaik karena telah disesuaikan dengan treshold yang digunakan dalam sistem ini. Sedangkan untuk mobil rata – rata berjarak 240 cm. Pengambilan citra kendaraan dilakukan pada pagi, siang dan malam hari.
B. Preprocessing
Pada tahap preprosesing ini dibahas mulai dari proses kalibrasi, pembacaan user tag, pemanggilan database dan proses pendeteksian nomor polisi kendaraan bermotor.
Kalibrasi
Langkah-langkah yang dilakukan agar tujuan diatas tercapai antara lain sebagai berikut:
Ambil posisi sensor warna dan
background
Kenalkan pola warna pin kalibrasi
Ambil nilai YCbCr disemua posisi sensor Packing warna Mulai 1 Periksa hasil kalibrasi Tampilkan hasil kalibrasi Simpan hasil kalibrasi terakhir Selesai 1
1 Ambil posisi sensor warna dan background. Pada langkah ini sistem mengambil posisi sensor warna dan background yang sebelumnya sudah dideklarasikan dan disimpan pada saat menjalankan sistem webcam.
2 Kenalkan pola warna pin kalibrasi dideklarasikan matriks 3 x 3 yang merupakan pola warna user tag kalibrasi dan posisi warna merah, hijau, biru dan hitam yang dijadikan referensi untuk user tag yang lain.
3 Ambil nilai YCbCr disemua posisi sensor dari informasi posisi sensor warna dan background yang sudah diload tadi, sistem akan meng-crop gambar yang ditangkap oleh webcam pada posisi tersebut dan mengambil rata-rata nilai RGB nya. Sehingga diperoleh rata-rata nilai RGB disemua posisi sensor baik sensor warna maupun sensor background yang dinyatakan sebagai matriks 15 x 3. 4 Packing warna
Ambil rata-rata nilai RGB pada matriks 15 x 3 yang dihasilkan langkah diatas. Untuk menentukan nilai akhir RGB merah dihitung dari rata-rata nilai RBG pada posisi 1 dan 9 (dinyatakan pada baris 1 dan 9), RGB hijau dihitung dari rata-rata nilai RGB pada posisi 2 dan 8, RGB biru dihitung dari rata-rata nilai RGB pada posisi 3 dan 7, RGB hitam dihitung dari rata-rata nilai RGB pada posisi 5, RGB sensor background dihitung dari rata-rata nilai RGB pada posisi 10. Selain itu, ditentukan pula threshold dari masing-masing warna. Threshold diperoleh dengan mencari nilai maximum dari tiap warna ditambah delta sebesar 10 pixel. Untuk threshold sensor background, langsung di tentukan sebesar 25 pixel.
5 Periksa hasil kalibrasi
Kembali dilakukan cropping pada setiap posisi sensor, kemudian dicek besar nilai RGB pada setiap warna (merah, hijau, biru, hitam) dikurangi dengan nilai RGB pada warna referensi. Apabila pada pengecekan pertama (elemen warna merah) nilai tersebut lebih kecil atau sama dengan threshold merah yang sudah ditentukan sebelumnya, maka warna yang terdeteksi adalah merah. Namun jika nilainya lebih besar, maka lakukan pengecekan pada elemen warna yang lain yaitu hijau, biru, dan hitam. Dari hasil tersebut, warna hasil pembacaan ditampilkan pada figure agar admin (pengelola sistem) dapat mengetahui letak kesalahannya dimana jika terjadi kesalahan pembacaan.
6 Tampilkan hasil kalibrasi
Sistem akan mencocokan hasil pembacaan dengan pola user tag kalibrasi. Jika sama, maka nilai-nilai hasil pembacaan ditampilkan pada gui main. Jika tidak sama, maka akan muncul keterangan bahwa kalibrasi tidak berhasil dan harus diulangi.
7 Simpan hasil kalibrasi yang terakhir
Selain ditampilkan nilai tersebut juga disimpan, agar jika dibutuhkan bisa digunakan kembali tanpa harus melakukan kalibrasi dari awal.
Pembacaan User Tag
Setelah sistem memiliki informasi range warna untuk mengklasifikasikan warna-warna yang ditangkap oleh sensor, maka sistem dapat dimanfaatkan untuk pembacaan user tag. Saat sistem distart, sistem akan mengambil informasi posisi sensor warna dan background serta nilai kalibrasi yang telah
diperoleh pada susbsistem kalibrasi. Sistem akan membaca kembali warna apa yang tertangkap oleh sensor. Jika masih sama dengan warna kalibrasi maka sistem akan memerintahkan untuk mencabut user tag tersebut.
Saat user tag dicabut, sensor background akan terus mengecek sampai keenam sensor background membaca warna hitam yang artinya user tag telah sepenuhnya dicabut. Ini ditandai oleh warna merah pada sensor background. Jika kemudian sensor background kembali membaca warna putih, maka dilakukan pengambilan nilai kalibrasi untuk membaca warna yang terbaru yang ditangkap oleh sensor warna. Jika sama dengan warna user tag sebelumnya maka sistem akan memerintahkan untuk mencabut user tag tersebut. Jika tidak, maka pola warna yang telah di ubah ukurannya menjadi matriks 1 x 9 tersebut dicocokkan dengan data user tag yang ada pada database mysql. Untuk data yang ditemukan, akan ditampilkan informasi-informasi seperti pola color code, nama user, nim, no plat kendaraan, jenis dan tahun kendaraan serta foto user. Pola color code tersebut akan tercatat pada database pengguna parkir disertai dengan tanggal dan jam color code tersebut dibaca oleh sistem. Namun jika data tidak ditemukan, maka sistem akan memberitahukan bahwa user tidak terdaftar.
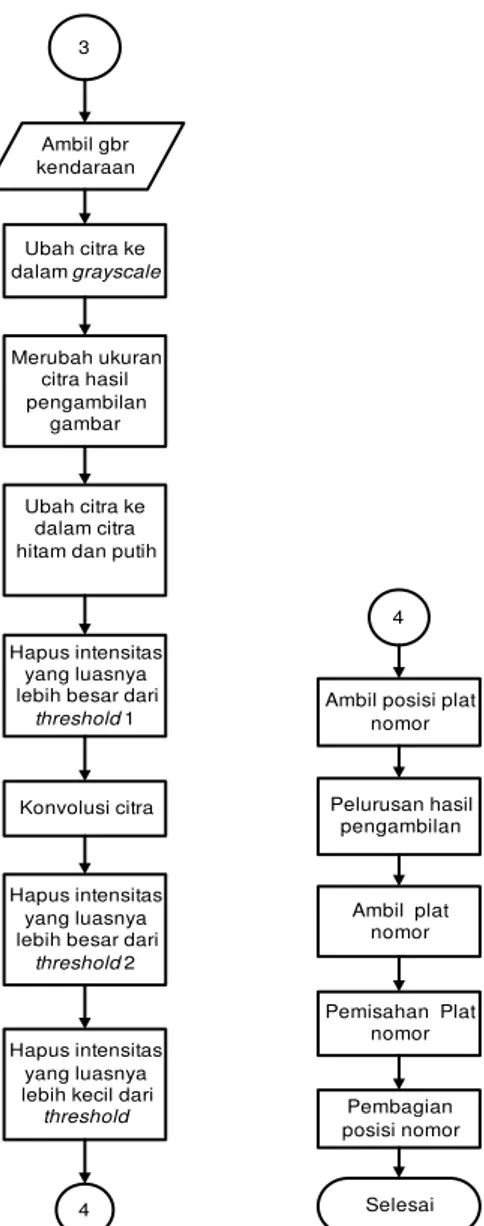
Sistem Pencarian dan Pengenalan Plat Nomor Kendaraan Pada citra uji ini didapat melalui pengcapturan dari webcam dengan jarak tertentu dari kendaraan. Untuk sepeda motor pengambilan gambar dilakukan dengan jarak minimal 130 cm dari webcam, sedangkan pada mobil dilakukan pengambilan gambar dengan jarak minimal 240 cm dari webcam. Format yang didapat dari hasil pengambilan gambar adalah *.jpg dan berukuran 960 x 720 pixel. Berikut adalah gambaran umum proses pengolahan citra uji.
Langkah – langkah yang dilakukan dalam pengolahan citra uji adalah sebagai berikut:
1 Mengubah citra uji ke dalam citra grayscale
Pengubahan citra uji dari citra RGB menjadi citra grayscale dilakukan untuk mempermudah pemrosesan citra latih yang akan diubah ke dalam citra black and white.
2 Imresize citra uji
Citra kemudian diubah ukurannya menjadi 960 x640 pixel. Pengubahan bertujuan untuk mempercepat pemrosesan dalam citra latih, oleh karena itu dipilih ukuran pixel yang tidak terlalu besar.
3 Mengubah citra uji ke dalam citra black and white
Dalam pengubahan ke dalam citra black and white antara mobil dan sepeda motor mempunyai nilai threshold yang berbeda yaitu 128 untuk sepeda motor dan 120 untuk mobil.
Ambil gbr kendaraan Ubah citra ke dalam grayscale Merubah ukuran citra hasil pengambilan gambar Ubah citra ke dalam citra hitam dan putih
Hapus intensitas yang luasnya lebih besar dari
threshold1
Konvolusi citra
Hapus intensitas yang luasnya lebih besar dari
threshold2
Hapus intensitas yang luasnya lebih kecil dari
threshold
4 3
4
Ambil posisi plat nomor Pelurusan hasil pengambilan Ambil plat nomor Pemisahan Plat nomor Selesai Pembagian posisi nomor
Gambar 6. Flowchart pengolahan citra uji
4 Remove intensitas yang luasnya besar + threshold pertama Remove intensitas ini digunakan untuk menghapus luas
citra putih yang mempunyai luas lebih besar dari threshold yang telah ditentukan. Dan didalam tugas akhir ini threshold untuk sepeda motor sebesar 500 pixel dan mobil sebesar 550 pixel. Proses penghapusan ini dilakukan dengan mengubah pixel dari label yang luasnya besar ditambah threshold menjadi pixel 0.yang kemudian dikalikan dengan citra sebelum dijalankan fungsi remove intensitas. Nilai dari threshold ditentukan melalui tiga buah percobaan. Untuk sepeda motor dilakukan dengan threshold 300, 500 dan 700. Sedangkan pada mobil dilakukan dengan threshold 350, 550, dan 750. Dan didapat grafik sebagai berikut:
Mulai
Citra hitam putih
pelabelan
menghitung luas masing -masing label
cari luas (max/min)+treshold
Hitamkan luas yang tidak memenuhi syarat threshold sesuai tipe yang
digunakan
selesai
Menghilangkan bagian citra yang tidak memenuhi syarat
Gambar 7. Flowchart Remove intensitas
5 Konvolusi citra
Prinsip kerja konvolusi citra adalah memperluas nilai 1 atau pixel putih dari citra yang berpixel putih ke sekelilingnya sesuai dengan ukuran dari konvolusi yang telah ditetapkan. Di dalam sistem ini untuk sepeda motor dan mobil menggunakan ukuran konvolusi yang sama yaitu 20 x 20 pixel, yang berarti pixel putih diperluas ke atas, bawah, kanan, dan kiri sebesar 10 pixel putih . Nilai dari konvolusi ditentukan melalui tiga buah percobaan. Untuk sepeda motor dilakukan dengan nilai 10, 20 dan 30. Sedangkan pada mobil dilakukan dengan nilai 10, 20 dan 30.
6 Remove intensitas yang luasnya besar + threshold kedua Remove intensitas ini digunakan untuk menghapus luas citra putih yang mempunyai luas lebih besar dari threshold yang telah ditentukan. Dan didalam tugas akhir ini threshold untuk sepeda motor sebesar 17000 pixel dan mobil sebesar 11000 pixel. Proses penghapusan ini dilakukan dengan mengubah pixel dari label yang luasnya besar ditambah threshold menjadi pixel 0.yang kemudian dikalikan dengan citra sebelum dijalankan fungsi remove intensitas. . Nilai dari threshold ditentukan melalui tiga buah percobaan. Untuk sepeda motor dilakukan dengan threshold 12500, 17500 dan 22500. Sedangkan pada mobil dilakukan dengan threshold 900, 11000 dan 16000. 7 Remove intensitas yang luasnya kecil
Remove intensitas ini digunakan untuk menghapus semua luas citra putih yang mempunyai luas kecil. Sehingga menyisakan citra dengan luas pixel putih yang paling besar.
8 Croping posisi plat nomor
Pada cropping posisi plat nomor dilakukan cropping pada daerah yang mempunyai luas putih saja. Dengan mencari titik koordinatnya terlebih dahulu. Dan citra yang di crop adalah citra black and white.
9 Pelurusan plat nomor
Pelurusan citra ini menggunakan metode hough transform yang mencari sudut kemiringan dari citra uji ini dengan mempertimbangkan banyaknya pixel putih yang dikenai oleh garis dari hough transform.
10 Croping plat nomor
Croping plat nomor ini didasarkan pada pencarian pixel putih awal dari baris sampai di dapat pixel hitam pada baris berikutnya sehingga yang diambil adalah citra sebelum didapat pixel hitam pada baris plat nomor.
11 Slice plat nomor
Pada proses ini dicari jumlah dari karakter yang akan di segmentasi. Cara yang digunakan dengan mengurangkan karakter awal sampai karakter sebelum karakter akhir dikurang karakter kedua sampai karakter akhir. akan didapat jumlah pixel awal dan pixel akhir dari tiap karakter. Yang dibagi dengan dua untuk mendapatkan total karakter yang akan dikenali.
12 Pembagian posisi nomor
Dalam pembagian karakter plat nomor akan di deteksi pixel putih pertama dan terakhir berdasarkan kolom pada plat nomor kendaraan. Dan akan dilakukan pengecropan pada wilayah tersebut. Dan hasil pengecropan menjadi data uji yang akan dikenali dengan KNN.
C. Identifikasi dengan KNN
Pada proses identifikasi ini dibagi kedalam dua bagian, yaitu pengolahan citra latih, dan pengenalan karakter dengan KNN.
Pengolahan Citra Latih
Pada pengolahan citra latih ini digunakan 4 dan 2 buah citra latih dari masing – masing kelas. Citra latih yang digunakan berformat *.jpg, citra latih ini diambil dari tugas akhir sebelumnya dan juga edi-tan dengan adobe photoshop cs2. Citra dirubah kedalam citra black and white. Citra latih ini dilakukan cropping atas dan bawah dan dirubah ukurannya menjadi 66 x 34 piksel. Untuk selanjutnya citra latih diubah formatnya yaitu dengan menjadikan ke dalam satu kolom yang berukuran 1 x 2244 piksel. Kemudian dikelompokkan berdasarkan ciri karakter pada masing-masing citra latih, dan disimpan menjadi data latih.
mulai Citra latih Merubah citra RGB ke BW Ambil citra BW Merubah ukuran citra menjadi 34x66 Merubah menjadi ukuran 1 x 2244
Simpan data latih
selesai
Gambar 8. Flowchart pengolahan citra latih
Pengenalan Karakter dengan KNN
Pada pengenalan karakter KNN berdasarkan kedekatan ciri berdasarkan euclidean distance. Prinsip kerjanya adalah membuat data uji yang berupa angka atau huruf dirubah ukuannya menjadi 34 x 66 piksel dan kemudian dirubah lagi ke dalam ukuran 1 x 2244 piksel. Perubahan ini di karenakan data latih juga berukuran 1 x 2244 piksel. Tiap piksel dari data uji akan dikurangkan dengan posisi piksel yang sama pada setiap data latih, dan hasilnya dikuadratkan. Sesuai dengan rumus Euclidean distance. Dari hasil rumus Euclidean distance akan didapat suatu nilai dari masing – masing group, group yang mempunyai nilai paling kecil yang akan dibaca sebagai huruf atau angka yang terpilih.
D. Perbandingan Plat Nomor database dengan yang teridentifikasi
Setelah didapat plat nomor hasil deteksi dengan metode KNN, plat nomor yang terdapat pada database kemudian di load. Begitu juga dengan plat nomor hasil pendeteksian. Kemudian dibandingkan antara kedua plat nomor tersebut. Kedua plat nomor berkarakter huruf besar semua tanpa ada spasi.
Ambil plat nomor pada database
Ambil plat nomor yang terbaca Plat nomor tidak sesuai dengan database Sama antara database dan yang
terbaca?
Selesai Mulai
ya tidak
Gambar 9. Flowchart proses perbandingan plat nomor kendaraan
IV. HASIL DAN DISKUSI
Tampilan Pengujian Perangkat
Gambar 10. Tampilan Verifikasi Nomor Kendaraan
Gambar 11. Tampilan Sistem Keluar Parkir
Sistem diuji pada 3 kondisi yaitu pada pagi hari, siang hari, dan sore hari. Masing – masing terdiri dari 10 sample kendaraan bermotor, yaitu motor dan mobil. Jadi total sample yang digunakan sebanyak 60 citra uji.
Pengujian Pencarian Plat Nomor Kendaraan
Dalam pencarian plat nomor kendaraan digunakan 60 citra uji. Masing-masing terdiri dari 10 citra sepeda motor dan 10 citra mobil, pada kondisi pagi (07.00-09.00), siang (11.00-13.00) dan sore hari (15.00-17.00).
Tingkat akurasi yang didapat dalam pencarian plat nomor kendaraan sebesar 98.3%. Terdapat 1 gambar sepeda motor, pada kondisi pagi hari yang tidak terdeteksi. Hal ini disebabkan karena gambar plat nomor tersebut terkena pantulan cahaya. Sehingga dapat disimpulkan bahwa kondisi waktu tidak mempengaruhi tingkat akurasi pencarian plat nomor, akan tetapi yang mempengaruhi adalah karena adanya pantulan cahaya.
Pengujian Pengenalan Karakter dengan K-Nearest Neighbor
Dalam pengenalan karakter plat nomor menggunakan metode KNN dengan dua dan empat citra latih, digunakan nilai K yang berbeda – beda, yaitu dengan nilai 1, 3 dan 5.
Tabel 1. Hasil Uji Pendeteksian Plat Nomor Sepeda Motor dengan 2 Citra Latih
Total Karakter yang Terdeteksi
Kendaraan Kondisi Total
Karakter K=1 K=3 K=5 Pagi 64 39 38 35 Siang 72 53 51 55 Sepeda Motor Sore 73 49 48 48 Total 209 141 137 138 Akurasi (%) 67.46 65.55 66.03
Waktu rata – rata (detik) 9.02 9.13 9.36
Tabel 2. Hasil Uji Pendeteksian Plat Nomor Sepeda Motor dengan 4 Citra Latih
Total Karakter yang Terdeteksi Kendaraan Kondisi Total
Karakter K=1 K=3 K=5 Pagi 64 33 36 38 Siang 72 51 52 50 Sepeda Motor Sore 73 53 51 46 Total 209 137 139 134 Akurasi (%) 65.55 66.51 64.11
Waktu rata – rata (detik) 9.98 10.3 10.58
Tabel 3. Hasil Uji Pendeteksian Plat Nomor Mobil dengan 2 Citra Latih
Total Karakter yang Terdeteksi
Kendaraan Kondisi Total
Karakter K=1 K=3 K=5 Pagi 68 59 58 59 Siang 70 58 59 59 Mobil Sore 72 55 57 56 Total 210 172 174 174 Akurasi (%) 81.9 82.86 82.86
Tabel 4. Hasil Uji Pendeteksian Plat Nomor Mobil dengan 4 Citra Latih
Total Karakter yang Terdeteksi Kendaraan Kondisi Total
Karakter K=1 K=3 K=5 Pagi 68 59 57 58 Siang 70 59 60 58 Mobil Sore 72 60 57 57 Total 210 178 174 173 Akurasi (%) 84.76 82.86 82.38
Waktu rata – rata (detik) 9.85 10.17 10.47
Pada tabel 1, 2, 3, dan 4 menunjukkan bahwa pada pendeteksian plat nomor sepeda motor persentasi akurasi terbesar 67.46% diperoleh pada penggunaan 2 citra latih dengan nilai K = 1. Nilai K=1 berarti bahwa setiap pixel data uji diproses dengan satu pixel data latih yang terletak sama. Sedangkan pada mobil, persentasi akurasi terbesar 84.76% diperoleh pada penggunaan 4 citra latih dengan K = 1
Oleh karena itu, untuk selanjutnya pada penelitian ini digunakan nilai K = 1 pada pendeteksian plat nomor sepeda motor, dan plat nomor mobil.
Pengujian Pengaruh Jumlah Citra Latih
Dari tabel 1 dan 2 juga dapat disimpulkan bahwa pada pendeteksian plat nomor sepeda motor, penggunaan 2 citra latih mempunyai tingkat akurasi yang lebih tinggi, yaitu sebesar 67.46%. Hal ini disebabkan karena pada plat nomor sepeda motor secara umum sudah tidak standar, yaitu karakter plat nomor yang tipis dan beragam.
Dari tabel 3 dan 4 juga dapat disimpulkan bahwa pada pendeteksian plat nomor mobil, penggunaan 4 citra latih mempunyai tingkat akurasi yang lebih tinggi yaitu sebesar 84.76%. Hal ini disebabkan karena pada plat nomor mobil secara umum sudah mengikuti standar yang ditetapkan kepolisian.
Oleh karena itu, untuk selanjutnya pada penelitian ini digunakan 2 citra latih pada pendeteksian plat nomor sepeda motor, dan 4 citra latih pada pendeteksian plat nomor mobil. Pengujian Pembacaan Color Code
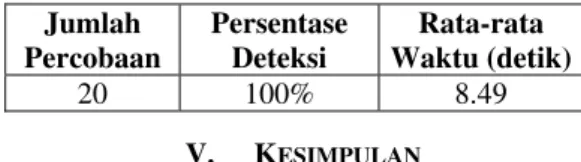
Keberhasilan sistem yang dirancang juga ditentukan oleh tingkat akurasi pembacaan color code yang digunakan sebagai pemanggil database user. Sehingga dari database tersebut diperoleh informasi mengenai plat nomor kendaraan user yang akan diverifikasi. Jumlah color code yang diujikan dalam sistem ini adalah sebanyak 20 kartu color code.
Dari hasil pengujian pada tabel 5, diperoleh tingkat akurasi
untuk pendeteksian color code sebesar 100%. Hal ini
menunjukkan bahwa sistem berhasil mengenali setiap color code yang dibaca sistem. Kemudian juga diperoleh informasi bahwa waktu pembacaan color code, mulai dari kartu color
code dimasukkan kedalam tempat capture kartu sampai
database user ditampilkan yaitu selama 8.49 detik. Dengan
total gabungan mulai dari color code sampai pembacaan karakter untuk mobi mempunyai tingkat akurasi 84.76%, sedangkan sepeda motor 67.46%.
Tabel 5. Hasil Uji Pembacaan User Tag Color Code
Jumlah Percobaan Persentase Deteksi Rata-rata Waktu (detik) 20 100% 8.49 V. KESIMPULAN
Dari hasil analisis terhadap pengujian yang dilakukan sistem verifikasi nomor kendaraan bermotor pada sistem parkir, maka diperoleh kesimpulan sebagai berikut:
1. Pada penelitian ini telah dirancang dan direalisasikan program sistem verifikasi nomor kendaraan bermotor, yang diujikan pada kondisi pagi, siang, dan sore hari, dimana untuk keberhasilan sistem dalam pencarian plat nomor sepeda motor adalah sebesar 96.67%, dan untuk pencarian plat nomor mobil adalah sebesar 100%.
2. Keberhasilan dalam pencarian plat nomor sepeda motor pada pagi hari sebesar 90% dengan akurasi pembacaan karakter 60.94%, siang hari 100 % dengan akurasi pembacaan karakter 73.61% dan sore hari 100% dengan akurasi pembacaan karakter 67.23%.
3. Keberhasilan dalam pencarian plat nomor mobil pada pagi hari sebesar 100% dengan akurasi pembacaan karakter 86.76%, siang hari 100 % dengan akurasi pembacaan karakter 84.29% dan sore hari 100% dengan akurasi pembacaan karakter 83.33%.
4. Parameter terbaik yang digunakan pada processing pencarian plat nomor kendaraan adalah pada remove intensitas pertama sebesar 500 piksel untuk sepeda motor,
dan 550 piksel untuk mobil. Sedangkan pada remove
intensitas kedua sebesar 17000 piksel untuk sepeda motor dan 11000 piksel untuk mobil. Konvolusi yang digunakan adalah 20x20 piksel untuk sepeda motor dan mobil. 5. Keberhasilan pengenalan karakter pada proses pengujian
data menggunakan KNN (K-Nearest Neighbor) yang telah diajarkan pada sepeda motor adalah 67.46% dengan waktu rata – rata 9.02 detik, dan pada mobil adalah 84.76% dengan waktu rata – rata 9.85 detik.
DAFTAR PUSTAKA
[1] Koval V., Turchenko V., dkk, 2003. “Smart License Plate Recognition System Based on Image Processing Using Neural Network,” IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Lviv, Ukraine, pp. 123-127.
[2] Lee E.R., Kim P.K., dkk, 1994. “Automatic Recognition of a Car License Plate Using Color Image Processing,” Proceedings of the IEEE International Conference on Image Processing, ICIP-94, Volume 2, pp. 301 – 305.
[3] Paliyl I., Turchenko V., and other (2004). “Approach to Recognition of License Plate Numbers Using Neural Networks,” IEEE International Joint Conference on Neural Networks, 2004, Volume 4, pp. 2965 - 2970.
[4] Sabaragamu, K., dan Yoshiura, N., 2009. Intelligent and Standardized Parking Solution. IJCSNS International Journal of Computer Science and Network Security, Vol.9 No.4, halaman 213
[5] V. Kamat, S. Ganesan. An Efficient Implementation of the Hough Transform for Detecting Vehicle License Plates Using DSP'S, Cellular Neural Networks and Their Applications. Proceedings The IEEE 31st Annual 1997 International Carnahan Conference. 1997. pp 209-218.
[6] Wijaya, M. C., dan A. Prijono, 2007, Pengolahan Citra Digital Menggunakan. Matlab Image Processing Toolbox, Bandung: Informatika.
[7] Sugiharto, Aris. 2006. Pemrograman GUI dengan Matlab. Yogyakarta: Andi.
[8] Wikipedia. (2010). Tanda Nomor Kendaraan Bermotor,
www.id.wikipedia.org/wiki, terakhir diakses tanggal 5 Juli 2010.
[9] Wikipedia, 2010, K-Nearest Neighbor, www.en.wikipedia.org/wiki/K-nearest_neighbor_algorithm, terakhir diakses tanggal 5 Juli 2010.
[10] detikNews, 2010, Mayoritas Motor & Mobil Raib di Jakarta Karena Parkir di Pinggir Jalan, ditulis tanggal 28 Juli 2010),
http://www.detiknews.com/read/2010/07/28/153256/1408566/10/may oritas-motor-mobil-raib-di-jakarta-karena-parkir-di-pinggir-jalan, terakhir diakses tanggal 15 Oktober 2010
[11] VIVAnews, 2010, Lalulintas Jakarta Lumpuh di Tahun 2011, ditulis
tanggal 27 September 2010,