Jurnal
Elektro
PENS
www.jurnalpa.eepis-its.edu
Teknik Telekomunikasi
Vol.1, No.1, 2014
Politeknik Elektronika Negeri Surabaya
Kontrol Alat Elektronik Menggunakan Virtual Keypad Dengan
Metode Deteksi Warna
Buyung Setyo Nugroho, Akuwan Saleh, Haryadi Amran Darwito
Program Studi D4 Teknik Telekomunikasi Departemen Teknik Elektro Politeknik Elektronika Negeri Surabaya Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111
Tel: (031) 594 7280; Fax: (031) 594 6114
Email:[email protected], [email protected], [email protected]
Abstrak
Seiring dengan perkembangan teknologi yang sangat cepat serta meningkatnya sifat konsumtif manusia akan adanya kebutuhan listrik rumahan tentu saja membuat para controlling developer semakin berusaha mengembangkan aplikasi pengontrolan arus listrik yang efisien dan mudah untuk dijalankan. Pada penelitian ini dibuat aplikasi pengontrolan alat elektronik menggunakan virtual keypad dengan deteksi warna sebagai cara menjalankan pointer sistem. Kemudian pointer mmposisikan pada tombol virtual keypad dan mengatur alat elektronik dengan memanfaatkan komunikasi antara PC dengan microcontroller. Untuk optimasi dalam menelusuri pergerakan objek merah, digunakan metode optical flow. Dari hasil pengujian dapat disimpulkan bahwa aplikasi ini dapat berjalan dengan baik ketika jarak rata-rata kamera dengan objek sejauh 10-95 cm dengan kondisi pencahayaan 70-2950 candela. Sementara itu, system mampu memberikan respon yang cepat dalam pengaturan alat elektronik dengan kecepatan ± 1,24305 detik hingga 1,38695 detik.
Kata kunci: Pengontrolan, Pengolahan Citra, Alat Elektronik, Virtual Keypad, Deteksi Warna
1. Pendahuluan
Semakin majunya teknologi pada masa dewasa seperti ini, implementasi pengolahan citra digital tidak hanya berkisar antara pengenalan karakter wajah, jari, serta pencocokan untuk keperluan valid tidaknya data citra saja, Namun juga meliputi teknik pengontrolan. Hal ini dilandasi atas semakin banyak para controlling developer berusaha meminimalisir peran hardware seperti joystick, mouse, keyboard dan lain-lain untuk membuat aplikasi controller dengan tujuan untuk membantu pekerjaan manusia sehingga menjadi lebih mudah, cepat dan efisien.
USB to Serial
2. Metode
Dalam penelitian ini akan menggunakan beberapa langkah untuk mewujudkan aplikasi yang di inginkan. Oleh karena itu di perlukan juga beberapa informasi seputar metode yang dipakai.
2.1 Pelabelan Citra
Pelabelan (labelling) merupakan algoritma untuk menemukan komponen terkoneksi dalam sebuah citra dan menandainya. Pelabelan dilakukan pada citra yang memiliki banyak blob seperti pada citra biner. Frame yang diolah adalah frame asli dan frame hasil segmentasi yang dalam tipe binary.
Contoh, suatu citra mengandung P blob yang akan ditandai dengan asumsi blob yang akan ditandai bernilai 1 dan latar belakang bernilai 0. Pengecekan dimulai dari sisi kiri atas baris pertama kemudian menuju ke kanan, pindah ke baris selanjutnya dan seterusnya. Pixel blob pertama yang dijumpai diberi label 1, dan jika pixel selanjutnya yang berada di sebelah kanan mempunyai nilai intensitas yang sama maka akan diberi label 1 juga dan begitu seterusnya.
Jika pixel selanjutnya pada baris ini ternyata bernilai 0 maka tidak akan diberi label karena merupakan latar belakang dan pixel selanjutnya setelah latar belakang yang bernilai 0 akan diberi label 2 sebagai tanda blob kedua dan begitu seterusnya. Ketika pengecekan pindah ke baris selanjutnya maka pixel yang terkoneksi dengan pixel yang telah diberi label sebelumnya akan diberi label yang sama, sedangkan untuk pixel yang tidak terkoneksi pada pixel yang telah diberi label akan ditandai dengan label baru sampai sejumlah P blob. Untuk pixel yang belum diberi label namun mempunyai dua tetangga yang berbeda label maka pelabelan akan mengikuti label yang lebih kecil.[1]
Gambar 1. Proses Pelabelan Blob Per Baris
2.2 Optical Flow
Optical Flow adalah perkiraan gerakan suatu bagian dari sebuah citra berdasarkan turunan intensitas cahayanya pada sebuah sekuen citra. Pada ruang 2D hal ini berarti seberapa jauh suatu piksel citra berpindah diantara dua frame citra yang berurutan. Sedangkan pada ruang 3D hal ini berarti seberapa jauh suatu volume piksel (voxel) berpindah pada dua volume yang berurutan. Perhitungan turunan dilakukan berdasarkan perubahan intensitas cahaya pada kedua frame citra maupun volume. Perubahan intensitas cahaya pada suatu bagian citra dapat disebabkan oleh gerakan yang dilakukan oleh obyek, gerakan sumber cahaya, ataupun perubahan sudut pandang.[5]
2.3 Algoritma Lucas-Kanade
Algoritma Lucas-Kanade, pertama kali diajukan pada tahun 1981. Awalnya adalah sebuah usaha untuk mencari teknik registrasi citra yang cepat dengan memanfaatkan gradient intensitas spasial. Pada perkembangannya, algoritma ini kemudian menjadi salah satu algoritma optical flow yang penting. Berbeda dengan algoritma Horn-Schunk yang bekerja berbasis pada keseluruhan citra, algoritma ini bekerja berdasarkan pada informasi lokal yang diturunkan dari window kecil (patch) disekeliling titik yang diperhitungkan. Kelemahan digunakan window lokal kecil pada algorima Lucas-Kanade adalah tidak terdeteksinya gerakan-gerakan yang besar karena gerakan-gerakan tersebut jatuh diluar window. Permasalahan ini kemudian dapat diatasi dengan mengimplementasikan penyelesaian dengan prinsip piramida, yaitu pyramidal Lucas-Kanade. Prinsip ini merupakan penyelesaian berdasar iterasi dari level detil citra paling rendah hingga level detil citra paling tinggi.[5]
2.4 Komunikasi Antar Komponen Sistem
Gambar 3. Blok diagram sistem komunikasi antara PC dengan microcontroller
Pada sistem ini terdapat mikrokontroller sebagai perangkat untuk membaca dan mengolah data yang dikirim dari computer sebagai referensi untuk proses selanjutnya dalam mengatur driver relay.
Pengiriman data dari PC ke mikrokontroller ini menggunakan data karakter dimana tiap tombol keypad mewakili nilai karakter yang berbeda-beda sesuai dengan perintah yang dilakukan pada mikrokontroller untuk mengatur driver relay.
Pengiriman data digunakan komunikasi serial dimana apabila ada data yang dikirimkan ke mikrokontroler maka data tersebut langsung diolah oleh mikrokontroler. Untuk mempermudah pengolahan serta pengiriman data, maka data yang dikirimkan ke mikrokontroler hanya berupa satu karakter button. Pada mikrokontroler, input data karakter yang diterima akan diolah kemudian mikrokontroler akan mengatur driver relay berdasarkan data karakter yang diterimanya.
Gambar 4. Implementasi dari Blok Diagram Sistem Komunikasi Antar Komponen Sistem
3. Perancangan Sistem
Dari metode-metode yang telah ada maka akan dibuat sistem yang dapat membangun aplikasi yang diingikan. Aplikasi yang dibuat terdiri dari beberapa tahapan seperti Gambar 4 Blok diagram sistem.
Gambar 5. Blok Diagram Sistem
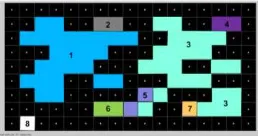
Langkah pertama yaitu pengambilan gambar dari objek oleh webcam external yang kemudian diproses oleh laptop. Dari gambar-gambar tersebut akan dibentuk menjadi beberapa frame untuk proses deteki gerakan dimana ia membandingkan nilai piksel awal dan pixel sebelumnya pada satuan waktu. Setelah itu dilanjutkan dengan proses deteksi obyek dimana ini bertujuan untuk mendeteksi apakah ada citra berupa benda berwarna merah atau tidak. Proses pendeteksian obyek ini berdasarkan warna yang mana sebelumnya dilakukan proses konversi warna gambar dari RGB ke HSV untuk mendapatkan nilai toleransi pada setiap dimensi warna HSV.
Nilai toleransi ini kemudian akan digunakan dalam proses threshold untuk memisahkan warna yang dibutuhkan dan tidak dibutuhkan, sehingga obyek akan dapat terdeteksi. Kemudian dilakukan proses pelabelan dengan menggunakan blob detection, yang merupakan suatu metode untuk mencari luas/titik-titik piksel pada suatu citra yang lebih terang maupun lebih gelap dari lingkungannya. Disini obyek terdeteksi akan diberi label 1 dan background diberi label 0. Proses pelabelan ini digunakan sebagai acuan untuk proses tracking object, yakni proses mencari dan mengikuti gerakan suatu obyek yang telah ditentukan pada proses color detection. Tracking object diintegrasikan dengan gerakan pointer pada form keypad. Pada tampilan monitor terdapat tampilan keypad yang nantinya akan digunakan sebagai acauan perintah apa yang akan dipilih sesuai posisi obyek berada dimana pada salah satu tombol keypad tersebut. Output proses ini berupa data karakter yang kemudian dijadikan sebagai input pada mikrokontroler.
Proses Capture
Untuk pengaktifan webcam digunakan dengan ukuran 320x240 pixel. Ukuran ini dipilih karena agar proses deteksi warna berjalan lebih cepat karena resolusi yang digunakan tidak terlalu besar dan memori yang digunakan tidak cepat habis. Selain itu, kecepatan penangkapan frame gambar pada ukuran ini masih cukup tinggi, sekitar 20 sampai 30 frame per detik (tergantung kamera dan komputer yang digunakan). Webcam yang digunakan untuk pengambilan data pada penelitian ini adalah webcam yang memiliki spesifikasi foto 8 megapixel.
Motion Detection
Teknik pendeteksian gerakan (motion detection) ini dilakukan untuk menganalisa vektor gerakan dari obyek yang bergerak pada rekaman gambar menggunakan algoritma Optical Flow. Teknik mendeteksi pergerakan yang digunakan adalah dengan membandingkan data pixel yang lalu dengan data pixel saat ini pada satuan t waktu.
Deteksi Warna Merah
Untuk mencari nilai merah sebelumnya dilakukan proses pengkonversian model gambar asli RGB menjadi model warna HSV. Hal ini bertujuan untuk menyederhanakan proses pemilihan warna untuk mendeteksi adanya keberadaan objek merah.
Proses selanjutnya yaitu proses threshold. Dalam pelaksanaannya thresholding membutuhkan suatu nilai yang digunakan sebagai nilai pembatas antara objek utama dengan latar belakang. Tujuan proses threshold untuk memisahkan gambar yang diambil dengan latar belakang menggunakan teknik Color Filtering pada warna-warna yang mendekati warna yang telah di tentukan.
Proses Pelabelan
Pelabelan (labelling) merupakan algoritma untuk menemukan komponen terkoneksi dalam sebuah citra dan menandainya. Pelabelan dilakukan pada citra yang memiliki banyak blob seperti pada citra biner. Misalnya, pada suatu citra dengan asumsi blob yang akan ditandai bernilai 1 dan latar belakang bernilai 0. Pengecekan dimulai dari sisi kiri atas baris pertama kemudian menuju ke kanan, pindah ke baris selanjutnya dan seterusnya. Pixel blob pertama yang dijumpai diberi label 1, dan jika pixel selanjutnya yang berada di sebelah kanan mempunyai nilai intensitas yang sama maka akan diberi label 1 juga dan begitu seterusnya.
Jika pixel selanjutnya pada baris tersebut ternyata bernilai 0 maka tidak akan diberi label karena merupakan latar belakang dan pixel selanjutnya setelah latar belakang yang bernilai 0 akan diberi label 2 sebagai tanda blob kedua dan begitu seterusnya.
Action Detection
Setelah obyek dengan warna merah terdeteksi dan pointer telah berada di salah satu tombol keypad, maka jika user ingin menekan tombol tersebut disimulasikan dengan cara menempatkan posisi pointer pada tombol yang diinginkan dalam waktu tertentu, dalam tugas akhir ini diatur waktu untuk proses penekanan yaitu selama 1 detik. Hasilnya akan muncul sebuah kalimat pada textbox yang berada pada form dan proses pengiriman data karakter menuju ke microcontroller.
4. Hasil Pengujian Dan Analisa
4.1 Pengujian Berdasarkan Kondisi Pencahayaan
Kondisi Pagi Hari, Didalam Ruangan dan Diluar Ruangan
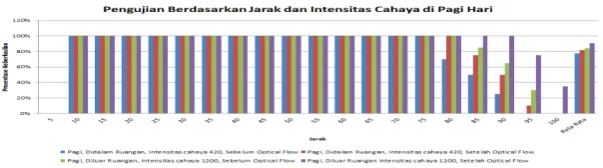
Gambar 6. Grafik Perbandingan Pengujian Berdasarkan Jarak dan Intensitas Cahaya di Pagi Hari Secara
Keseluruhan (Intensitas Cahaya: Dalam Ruangan 420 Candela, Luar Ruangan 1200 Candela)
Kondisi Siang Hari, Didalam Ruangan dan Diluar Ruangan
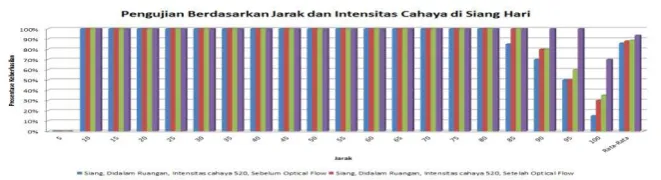
Gambar 7. Grafik Perbandingan Pengujian Berdasarkan Jarak dan Intensitas Cahaya di Siang Hari Secara
Keseluruhan (Intensitas Cahaya: Dalam Ruangan 520 Candela, Luar Ruangan 2950 Ca ndela)
Dari gambar 7 tersebut terlihat bahwa, untuk kondisi sebelum penambahan optical flow, saat didalam ruangan didapatkan nilai mencapai 86%. Sedangkan saat berada diluar ruangan didapatkan nilai lebih tinggi sebesar 88,75%. Sedangkan pengaruh setelah ditambahkannya optical flow untuk kondisi berada didalam ruangan, prosentase yang diperoleh meningkat hingga mencapai 88.75% cm. Sedangkan untuk kondisi luar ruangan sendiri setelah ditambahkan optical flow, prosentase keberhasilan yang diperoleh meningkat hingga mencapai 93.5%.
Kondisi Malam Hari, Didalam Ruangan dan Diluar Ruangan
Gambar 8 Grafik Perbandingan Pengujian Berdasarkan Jarak dan Intensitas Cahaya di Malam Hari Secara
Keseluruhan (Intensitas Cahaya: Dalam Ruangan 400 Candela, Luar Ruangan 70 Candela)
Dari gambar 8 tersebut, terlihat untuk kondisi sebelum penambahan optical flow, saat didalam ruangan didapatkan nilai mencapai 72.5%. Sedangkan saat berada diluar ruangan didapatkan nilai lebih rendah sebesar 52,5%. Pengaruh setelah ditambahkannya optical flow untuk kondisi berada didalam ruangan, prosentase yang diperoleh meningkat hingga mencapai 77.5% cm. Sedangkan untuk kondisi luar ruangan sendiri setelah ditambahkan optical flow, prosentase keberhasilan yang diperoleh meningkat hingga mencapai 68.75%.
4.2 Pengujian Berdasarkan Ukuran dan Jarak Pendeteksian Objek
Pengujian ini dilakukan pada malam hari pukul 23.00-23.45 WIB dengan kondisi pencahayaan 320 Candela, dimana pengujian dilakukan pada objek dengan ukuran berbagai ukuran yaitu 1 cm x 1 cm, 2cm x 2 cm, 3 cm x 3 cm, 4 cm x 4 cm, dan 5 cm x 5 cm. Hal ini dilakukan untuk mengetahui kemampuan sistem sejauh mana ia mampu mendeteksi adanya objek dari ukuran kecil hingga besar.
Tabel 1. Pengujian Terhadap Objek Dengan Ukuran Berbeda-beda Dengan Intensitas Cahaya Sebesar 320 Candela
Jarak (cm) Ukuran Objek
1 cm x 1 cm 2 cm x 2 cm 3 cm x 3 cm 4 cm x 4 cm 5 cm x 5 cm
10 100% 100% 100% 100% 100%
15 100% 100% 100% 100% 100%
20 100% 100% 100% 100% 100%
25 100% 100% 100% 100% 100%
30 100% 100% 100% 100% 100%
35 50% 100% 100% 100% 100%
40 0% 100% 100% 100% 100%
45 0% 100% 100% 100% 100%
50 0% 50% 100% 100% 100%
55 0% 0% 100% 100% 100%
60 0% 0% 100% 100% 100%
65 0% 0% 100% 100% 100%
70 0% 0% 50% 100% 100%
75 0% 0% 0% 100% 100%
80 0% 0% 0% 100% 100%
85 0% 0% 0% 100% 100%
90 0% 0% 0% 100% 100%
95 0% 0% 0% 50% 100%
100 0% 0% 0% 0% 100%
Keterangan :
100% : Objek dapat terdeteksi dan pergerakan pointer stabil mengikuti pergerakan objek 50 : Objek dapat terdeteksi, namun pergerakan pointer tidak stabil
0% : Objek tidak dapat terdeteksi
Dari tabel tersebut terlihat bahwa pada objek dengan ukuran terkecil yaitu 1 cm x 1 cm hanya mampu dideteksi oleh objek secara sempurna hanya sampai jarak 30 cm dengan prosentase rata-rata sebesar 28,95%. Sedangkan pada objek terbesar yaitu 5 cm x 5 cm, objek dapat terdeteksi secara sempurna hingga jarak 100 cm dengan prosentase rata-rata keberhasilan hingga 100%. Hal ini membuktikan bahwa semakin besar ukuran objek yang akan dideteksi maka sistem semakin mampu sistem mendeteksi objek tersebut dalam jarak jauh.
4.3 Pengujian Berdasarkan Sensitivitas Sistem Dalam Merespon Inputan Karakter
Pengujian ini dilakukan dengan cara menempatkan pointer pada tombol keypad lalu dilakukan penekanan selama 5 detik kemudian melihat berapa kali sistem merespon adanya inputan karakter dalam range waktu 5 detik tersebut berdasarkan karakter yang muncul di form. Hal ini dilakukan untuk mengetahui tingkat sensitivitas sistem dalam merespon input penekanan pada virtual keypad.
Tabel 2. Pengujian Tingkat Sensitivitas Sistem Dalam Merespon Adanya Inputan Melalui Tombol Keypad Dalam
Range Waktu 5 detik Dengan Time Delay Waktu 1 Detik
Tombol Keypad Jarak ke – (cm)
Dari tabel diatas, terlihat bahwa didapatkan nilai rata-rata sensitivitas yang memiliki nilai sempurna 100% hanya saat jarak objek dengan kamera yaitu diatas 20 cm. Hal ini disebabkan karena pada jarak 10-20 cm, pergerakan objek menjadi sangat sensitif karena pixel objek yang terdeteksi semakin besar sehingga bila objek mengalami sedikit gerakan, maka pointer akan bergerak keluar dari tombol keypad. Semakin dekat jarak objek dengan kamera, maka pergerakan pointer semakin sensitif.
4.4 Pengujian Komunikasi Serial Antara Microcontroller dengan Driver Relay
Pengujian ini bertujuan untuk mengetahui keberhasilan microcontroller dalam membaca data yang masuk kemudian data tersebut diproses sebagai acuan dalam melakukan control pada driver relay. Percobaan ini menggunakan media serial monitor di software arduino.
Alat di terminal 1 Lampu LED Alat di terminal 2 Kipas Angin Alat di terminal 3 Lampu Pijar Alat di terminal 4 Charger Handphone
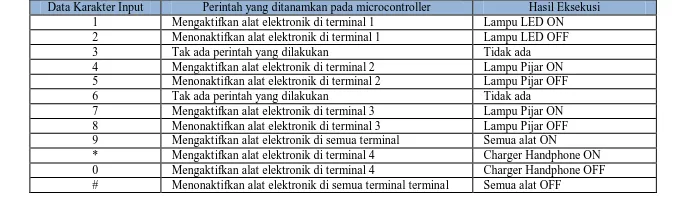
Tabel 3. Pengujian Keberhasilan Komunikasi Serial Antara Microcontroller Dengan Driver Relay
Data Karakter Input Perintah yang ditanamkan pada microcontroller Hasil Eksekusi 1 Mengaktifkan alat elektronik di terminal 1 Lampu LED ON 2 Menonaktifkan alat elektronik di terminal 1 Lampu LED OFF 3 Tak ada perintah yang dilakukan Tidak ada 4 Mengaktifkan alat elektronik di terminal 2 Lampu Pijar ON 5 Menonaktifkan alat elektronik di terminal 2 Lampu Pijar OFF 6 Tak ada perintah yang dilakukan Tidak ada 7 Mengaktifkan alat elektronik di terminal 3 Lampu Pijar ON 8 Menonaktifkan alat elektronik di terminal 3 Lampu Pijar OFF 9 Mengaktifkan alat elektronik di semua terminal Semua alat ON * Mengaktifkan alat elektronik di terminal 4 Charger Handphone ON 0 Mengaktifkan alat elektronik di terminal 4 Charger Handphone OFF # Menonaktifkan alat elektronik di semua terminal terminal Semua alat OFF
4.5 Pengujian Keseluruhan Sistem
Pengujian kali ini untuk mengetahui keberhasilan sistem yang telah dibuat, apakah telah sesuai dengan yang diharapkan atau belum.
Tabel 4. Pengujian Secara Keseluruhan Sistem
Tombol virtual keypad yang ditekan Perintah yang ditanamkan pada sistem Hasil Eksekusi
1 Mengaktifkan alat elektronik di terminal 1 Lampu LED ON 2 Menonaktifkan alat elektronik di terminal 1 Lampu LED OFF
3 Tak ada perintah yang dilakukan Tidak ada
4 Mengaktifkan alat elektronik di terminal 2 Lampu Pijar ON 5 Menonaktifkan alat elektronik di terminal 2 Lampu Pijar OFF
6 Tak ada perintah yang dilakukan Tidak ada
7 Mengaktifkan alat elektronik di terminal 3 Lampu Pijar ON 8 Menonaktifkan alat elektronik di terminal 3 Lampu Pijar OFF 9 Mengaktifkan alat elektronik di semua terminal Semua alat ON * Mengaktifkan alat elektronik di terminal 4 Charger Handphone ON 0 Mengaktifkan alat elektronik di terminal 4 Charger Handphone OFF # Menonaktifkan alat elektronik di semua terminal terminal Semua alat OFF
Dari tabel 4 terlihat bahwa eksekusi yang dilakukan oleh sistem telah sesuai dengan masukan karakter yang dilakukan melalui proses pendeteksian pointer pada tombol virtual keypad. Hal ini menunjukkan bahwa sistem telah dapat bekerja sesuai dengan yang diharapkan.
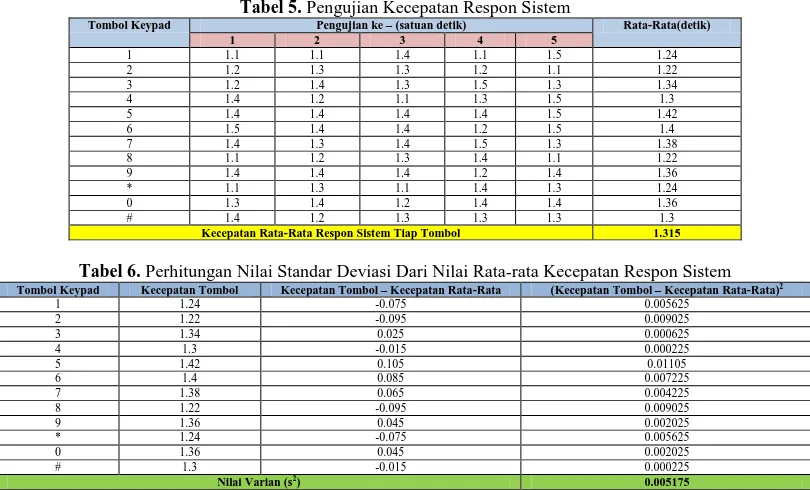
4.6 Pengujian Kecepatan Respon Berdasarkan Penekanan Tombol Keypad Hingga Muncul Proses Pengaturan Alat Elektronik
Pengujian ini dilakukan untuk mengetahui kecepatan respon sistem dalam melakukan proses pengaturan alat elektronik. Waktu kecepatan yang diukur dalam pengujian ini yaitu sejak pointer berada pada posisi tombol keypad hingga munculnya proses pengaturan alat elektronik. Delay timer yang digunakan dalam proses penekanan tombol virtual keypad yaitu sebesar 1 detik.
Tabel 5. Pengujian Kecepatan Respon Sistem
Tombol Keypad Pengujian ke – (satuan detik) Rata-Rata(detik)
1 2 3 4 5
Kecepatan Rata-Rata Respon Sistem Tiap Tombol 1.315
Tabel 6. Perhitungan Nilai Standar Deviasi Dari Nilai Rata-rata Kecepatan Respon Sistem
Tombol Keypad Kecepatan Tombol Kecepatan Tombol – Kecepatan Rata-Rata (Kecepatan Tombol – Kecepatan Rata-Rata)2
1 1.24 -0.075 0.005625
Setelah didapatkan nilai varian, maka nilai standar deviasi dapat diperoleh dengan mencari nilai akar dari nilai varian tersebut.
S = = = 0.07195
5. Diskusi
Pada aplikasi control alat elektronik menggunakan virtual keypad ini memiliki kelebihan dalam hal keakuratan pendeteksian obyek sesuai dengan range warna yang ditentukan dalam proses threshold, kemampuan sistem dalam merespon adanya masukan serta kecepatan dalam mengatur alat elektronik. adapun kekurangan pada aplikasi ini adalah pengaruh intensitas cahaya yang sangat mempengaruhi sistem dalam mendeteksi obyek. Intensitas cahaya yang telalu terang maupun terlalu gelap tidak akan memberikan hasil yang maksimal dalam proses pendeteksian obyek, sehingga diperlukan intensitas cahaya yang sedang untuk mendeteksi obyek dengan maksimal dan didapatkan keakuratan pendeteksian obyek secara tepat serta belum menggunakan koneksi wireless seperti bluetooth ynag tentunya membuat aplikasi ini semakin fleksibel.
6. Kesimpulan
Apabila jarak objek dengan kamera terlalu dekat atau pun terlalu jauh, maka system akan mengalami kesulitan dalam melakukan pendeteksian serta gerakan pointer akan menjadi tidak stabil dalam mengikuti gerakan objek.
Jarak serta waktu yang optimum untuk pendeteksian obyek di dalam ruangan adalah saat siang hari dengan jarak sejauh 10-85 cm dari kamera dengan intensitas cahaya sebesar ± 520 Candela. Sedangkan untuk kondisi diluar ruangan, jarak serta waktu yang optimum untuk pendeteksian objek yaitu saat siang hari dengan jarak sejauh 10-95 cm. Semakin jauh posisi obyek terhadap kamera, maka pendeteksian akan semakin sulit.
Ukuran objek sangat menentukan berhasil tidaknya sistem dalam mendeteksi keberadaan objek. Semakin besar ukuran objek, maka sistem jarak keberadaan objek yang mampu dideteksi oleh sistem juga semakin jauh.
Jarak yang optimum untuk melakukan pendeteksian berdasarkan kesensitivitas system yaitu sejauh > ±20 cm. Kesensitivitas system dalam merespon adanya masukan bergantung pada jarak objek terhadap kamera. Semakin dekat jarak objek terhadap kamera, semakin sensitif pergerakan pointer dalam mengikuti gerakan objek.
System mampu menampilkan respon pengaturan alat elektronik setelah dilakukan penginputan lewat keypad dengan kecepatan ± 1,24305 detik hingga 1,38695 detik. Kecepatan system dalam merespon penginputan karakter tergantung dari stabil tidaknya pointer ketika posisinya berada pada tombol yang dikehendaki.
Hasil pengujian banyak dipengaruhi oleh kondisi cahaya yang berbeda, dan jarak obyek terhadap kamera sehingga menpengaruhi proses kinerja system.
7. Referensi
[1] Yuliana, Tracking Color Object Berbasis Webcam Untuk Aplikasi Virtual Keyboard Menggunakan Metode Optical Flow, PENS, 2014.
[2] Octandila Sihotang, Kontrol P eralatan Elektronik Menggunakan Kode Tangan, PENS-ITS, 2012. [3] Raditya Nugroho, Sistem Pendeteksian Jari telunjuk pada Game “Tic-Tac-Toe” Menggunakan Metode
Viola and Jones, Jurnal Teknologi Informasi PENS-ITS, 2012.
[4] Rizqa Puji Rahmawati, Sistem Deteksi Jenis Bunga Menggunakan Nilai HSV Dari Citra Mahkota Bunga , Universitas Stikubank, Semarang, 2013
[5] Jeky Ali Buyung, Desain dan Simulasi Sistem Dokumentasi Tugas Akhir Otomatis Menggunakan Webcam Berbasis Image Processing dan K-nearest Neighbors, Proyek Akhir Institut Teknologi Telkom, Bandung, 2011.
[6] Ubaidillah Umar, Tracking Arah Gerakan Telunjuk Jari Berbasis Webcam Menggunakan Metode Optical Flow, Jurnal Elektro PENS-ITS, 2011
[7] Muhammad Nurfalah, Makalah Arduino & Ra spberry PI Mikrokontroller, Fakultas Teknik Universitas Tadulako, 2014.