i
PENGAMATAN GERAK KLANN LINKAGE DENGAN METODE
MULTIPLE EXPOSURE
LAPORAN
Disusun untuk memenuhi tugas Praktikum Fisika Kelas XI
Oleh :
Steve Andreas Immanuel / 25 / XIA
Lydia Astrella Wiguna / 17 / XIA
William Setyawan / 30 / XIA
Lucyana Enrica / 16 / XIA
SMA SANTO ALOYSIUS I
BANDUNG
ii
KATA PENGANTAR
Pertama-tama kami ingin berterima kasih kepada Tuhan Yang Maha Esa atas terbentuknya
laporan ini. Tanpa kuasa-Nya, maka niscaya kami tidak akan dapat menyelesaikan seluruh
proses penelitian juga laporan ini.
Kami juga ingin berterima kasih kepada guru pembimbing kami, Pak Eko Widiatmoko, M.Si,
karena telah membantu kami menyelesaikan sebagian dari penelitian ini.
Adapun laporan yang kami buat ini masih jauh dari sempurna, oleh karena itu kami mohon
maaf jika ada salah pengucapan maupun salah penyusunan kata.
Kami akan merasa sangat tersanjung jika saudara/i bersedia untuk memberikan kritik maupun
saran. Kritik dan saran itu nantinya akan menjadi masukan tersendiri bagi kami untuk
menyempurnakan laporan berikutnya.
Akhir kata, kami mengucapkan terima kasih dan semoga makalah ini akan berguna bagi kita
iii
DAFTAR ISI
KATA PENGANTAR ii
DAFTAR ISI iii
BAB IV HASIL DAN PEMBAHASAN 11
4.1 Hasil 11
4.2 Pembahasan 14
BAB V KESIMPULAN DAN SARAN 22
5.1 Kesimpulan 22
5.2 Saran 22
DAFTAR PUSTAKA 23
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Transportasi adalah perpindahan manusia atau barang dari suatu tempat ke tempat lain
menggunakan suatu kendaraan. Padatnya penduduk Indonesia, meningkatkan tingkat
kebutuhan akan transportasi. Mayoritas masyarakat Indonesia sangat bergantung aktivitas
tranportasi darat terutama pemakaian jalan raya.
Namun tidak dapat dipungkiri, masalah transportasi masih merupakan masalah yang tidak
henti-hentinya bermunculan walaupun sudah berusaha diatasi. Salah satu masalah yang
banyak muncul adalah masalah rusaknya jalan yang menyebabkan jalan berlubang-lubang
dan tidak rata.
Dampak terburuk yang ditimbulkan oleh jalanan yang rusak adalah menimbulkan kecelakaan
lalu lintas. Selain perasaan tidak nyaman pengendara, jalan yang rusak juga dapat
mengakibatkan rusaknya komponen kendaraan seperti roda.
Dengan mempertimbangkan gerakan tidak stabil mobil beroda pada jalan yang tidak rata, kami
mengamati gerakan dan kestabilan alat yang bergerak menggunakan model kaki Klann
linkage sebagai pengganti roda.
1.2 Rumusan Masalah
Dalam percobaan ini dirumuskan masalah yang akan diteliti sebagai berikut :
- Bagaimana gerak yang dihasilkan Klann linkage pada medan tertentu? - Apakah gerak yang dihasilkan Klann linkage stabil?
1.3 Tujuan
Sesuai dengan perumusan masalah yang telah dijelaskan di atas, maka dapat ditulis tujuan
dari percobaan sebagai berikut :
- Mengamati gerak yang dihasilkan Klann linkage pada medan tertentu. - Menentukan stabil tidaknya gerak Klann linkage.
1.4 Manfaat Percobaan
Melalui percobaan ini, diharapkan konsep gerak Klann linkage dapat diterapkan dalam
2
1.5 Ruang Lingkup Kajian
Dalam percobaan yang kami lakukan, ditetapkan beberapa batasan terhadap hal-hal yang
dicoba. Klann linkage yang digunakan dalam percobaan ini dibuat menggunakan LEGO
Mindstorm NXT 2.0. Medan-medan dibuat dengan papan tripleks dan stik es krim. Piringan
multiple exposure menggunakan tegangan 3V. Kamera yang digunakan adalah Canon 550D.
1.6 Hipotesis
Kami memperkirakan bahwa Klann linkage yang dibuat dapat berjalan dengan baik pada
3
BAB II
LANDASAN TEORI
2.1 Multiple Exposure
Multiple exposure adalah perpaduan dari dua atau lebih eksposur untuk membuat satu
gambar. Eksposur adalah jumlah paparan cahaya yang diterima oleh sensor kamera dalam
suatu pemotretan.
Biasanya kamera memiliki kepekaan terhadap cahaya yang merupakan fungsi waktu. Sebagai
contoh, satu detik eksposur adalah sebuah paparan di mana gambar yang dihasilkan kamera
responsif pada cahaya selama waktu bukaan satu detik. Kriteria yang menunjukkan multiple
exposure adalah sensitivitas cahaya yang naik lalu turun.
Dalam fotografi, multiple exposure merupakan sebuah teknik di mana bukaan kamera terbuka
lebih dari satu kali untuk mengambil gambar beberapa kali. Gambar yang dihasilkan
merupakan perpaduan gambar original dan gambar selanjutnya. Oleh karena itu multiple
exposure sering digunakan untuk menggambarkan serangkaian gerakan objek.
Karena memotret dengan teknik multiple exposure akan mengekspos frame yang sama
beberapa kali, kompensasi eksposur negatif harus diatur untuk menghindari overexposure.
Pencahayaan yang rendah hingga sedang adalah kondisi yang cocok pada penggunaan
teknik ini. Namun pengaturan kompensasi eksposur tidak diperlukan pada pemotretan benda
redup pada latar belakang yang benar-benar gelap.
2.1 Mekanisme Linkage
Linkage adalah rangkaian dari badan-badan yang bersifat kaku dan saling terhubung dalam
menghasilkan gaya dan pergerakan. Linkage biasanya dirancang untuk mengubah gaya dan
gerakan yang diterima menjadi gaya dalam betuk gerakan yang diinginkan. Pergerakan setiap
link(kaki) dari linkage didasarkan menurut perhitungan geometri. Setiap link pada linkage
dihubungkan dengan satu atau lebih bagian lain oleh suatu penghubung yang disebut
persendian. Penghubung antara bagian-bagian dibuat sedemikian rupa agar gerakannya
ideal.
Linkage merupakan komponen penting pada mesin-mesin dan peralatan. Contoh penggunaan
linkage yaitu pada wiper kaca mobil, suspensi sepeda, dan aktuator hidrolik. Pada
contoh-contoh ini komponen-komponen linkage bergerak pada bidang datar yang disebut plannar
linkage. Sistem linkage juga dapat digunakan pada mesin yang bergerak jalan sebagai
4
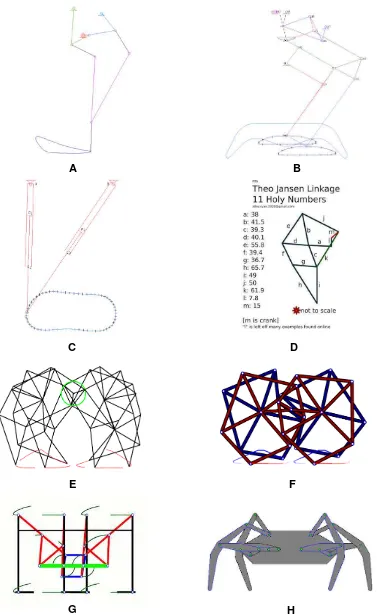
A B
C D
F E
G H
Gambar 2.1Beberapa contoh model leg mechanism, (A) Eight-bar leg mechanism, (B) Tokyo Institute of Technology walking chair, (C) 2 DOF leg mechanism of the
5
2.2 Klann linkage
Klann linkage adalah sebuah plannar linkage yang dirancang mirip gerakan kaki hewan dan
berfungsi sebagai pengganti roda.
Proporsi setiap kaki pada Klann linkage dibuat untuk mengoptimalkan linearitas kaki selama
setengah rotasi engkol. Sisa rotasinya memungkinkan kaki Klann linkage melangkah naik
pada ketinggian yang telah ditentukan sebelumnya dan kembali ke posisi awal untuk
mengulangi siklus. Dua gerakan ini yang digabungkan bersama-sama menjadi satu siklus
rotasi engkol memungkinkan frame kendaraan untuk berjalan sejajar dengan permukaan
tanah.
Gambar di atas menunjukkan sebuah linkage dalam posisi sepenuhnya memanjang,
pertengahan langkah, penarikan langkah, dan pengangkatan kaki dalam satu siklus berjalan.
Keempat gambar ini masing-masing menunjukkan sudut engkol yang berbeda, dari kiri ke
kanan : 0o, 90o, 180o, dan 270o.
Gambar 2.2 Bagian-bagian Klann linkage
6
Klann linkage memberikan banyak kelebihan dengan kemampuan yang dimilikinya. Klann
linkage dapat melangkahi batu-batu pinggiran jalan atau halangan lain, menaiki tangga, atau
berjalan ke daerah yang tidak dapat diakses dengan roda.
Karena keterbatasan kemampuan kami dalam mendesain Klann linkage versi sendiri, kami
menggunakan model Klann linkage yang sudah ada dari internet.
7
BAB III
METODOLOGI
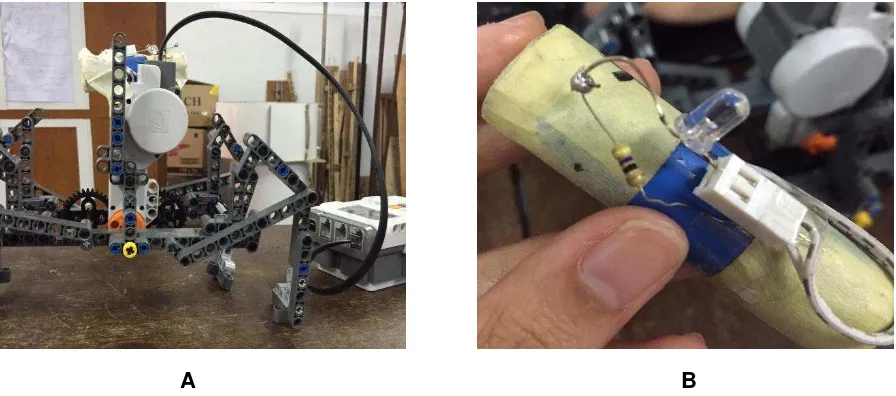
3.1 Alat yang Digunakan
Pada percobaan ini, kami menggunakan seperangkat LEGO Mindstorm NXT 2.0 yang
kemudian dirakit menjadi Klann linkage. Kemudian, LEGO MindstormNXT 2.0 diprogram agar
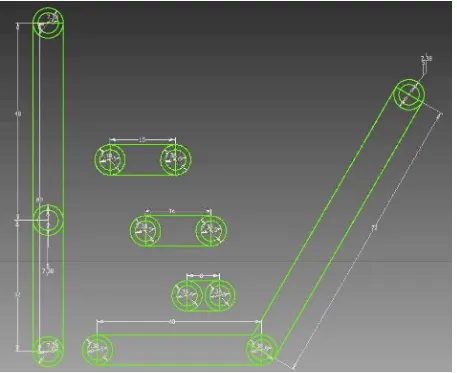
Klann linkage dapat berjalan dengan baik. Klann linkage pada percobaan ini memiliki panjang
kaki seperti tampak pada Gambar 3.2.
Untuk mengamati gerak Klann linkage, kami menggunakan metode multiple exposure. Dalam
menggunakan metode ini, dibutuhkan sumber cahaya pada Klann linkage tersebut sebagai
penanda posisi. Kami menggunakan LED bertegangan 3,7 V yang kemudian ditempelkan
pada Klann linkage.
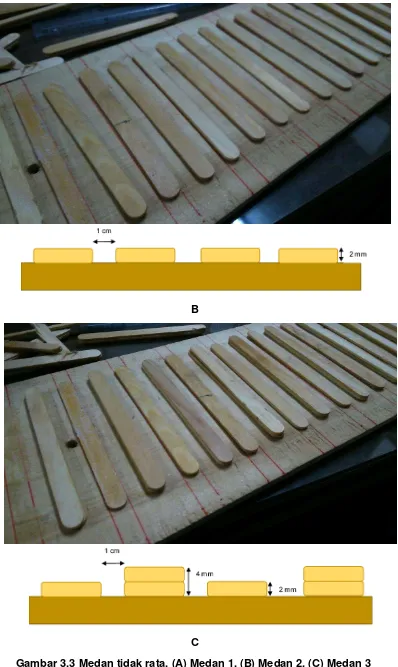
Medan yang digunakan berupa papan tripleks berukuran 15,4 cm X 89,7 cm. Pada percobaan
ini, Klann linkage dijalankan pada 4 medan yang berbeda. Untuk membuat medan-medan
tersebut, kami menggunakan stik es krim yang disusun dengan jarak tertentu.
A B
8
Gambar 3.2 Panjang kaki-kaki Klann linkage (dalam mm)
9
B
C
10
3.2 Percobaan yang Dilakukan
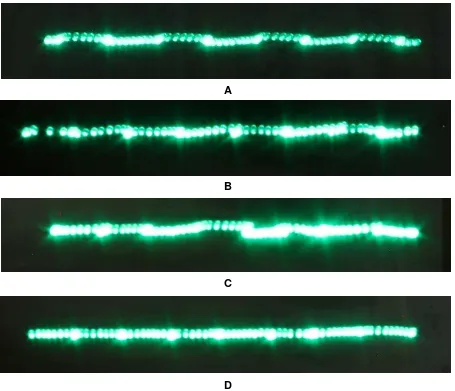
Kami mengamati posisi dari Klann linkage pada 4 macam medan menggunakan metode
multiple exposure. Hasil dari foto menunjukkan titik-titik LED yang menggambarkan gerak
Klann linkage. Setiap titik ke titik berikutnya membutuhkan waktu 1/21 detik. Kemudian dari
hasil foto dicari koordinat tiap titik LED yang terekam.
Pada percobaan yang dilakukan, kami mengambil beberapa foto pada tiap medan. Ternyata
pada medan yang sama, Klann linkage dapat menghasilkan gerak yang cukup berbeda. Hal
ini mungkin dikarenakan Klann linkage bergerak melenceng dari medan, tersandung, dan
faktor-faktor lain. Oleh karena itu, dari masing-masing medan kami memilih satu foto yang
paling mewakili gerak Klann linkage pada medan tersebut.
Pada medan yang rata, kendaraan dengan roda memiliki percepatan vertikal mendekati nol.
Pada percobaan ini, akan ditentukan stabil tidaknya gerak yang dihasilkan Klann linkage baik
11
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil
Hasil dari foto gerak Klann linkage pada setiap medan ditunjukkan pada Gambar 4.1. Dari
hasil tersebut, dicari koordinat tiap titik-titik LED pada gambar yang menggambarkan posisi
dari Klann linkage.
A
B
C
D
12
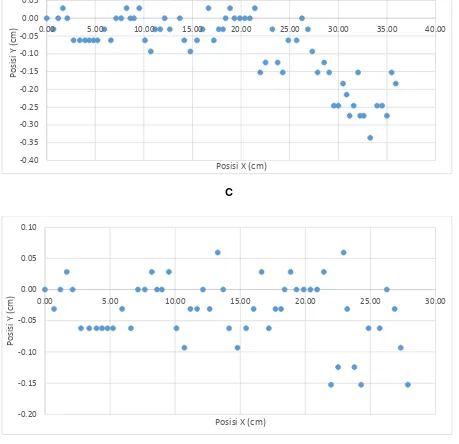
Kemudian setelah koordinat tiap titik didapat, dibuat tabel analisis yang terdapat pada
lampiran. Gambar 4.2 menunjukkan grafik posisi Y terhadap posisi X dalam 4 medan berbeda.
-0.50
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00
P
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00
13
Dari grafik di atas dapat dilihat bahwa gerak Klann linkage tidak begitu stabil. Dari beberapa
kali percobaan pada medan yang tidak rata (medan 2, medan 3, dan medan 4), Klann linkage
terkadang jatuh atau bergerak keluar dari medan. -0.40
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00
P
0.00 5.00 10.00 15.00 20.00 25.00 30.00
14
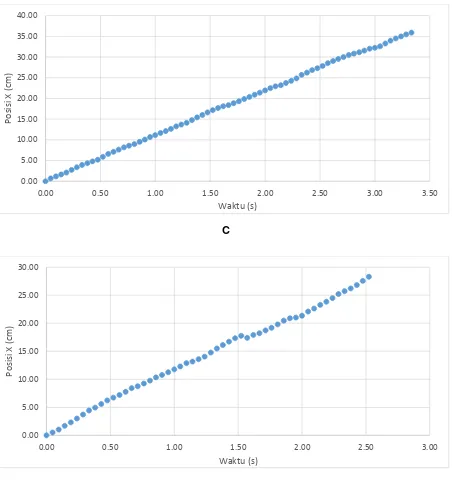
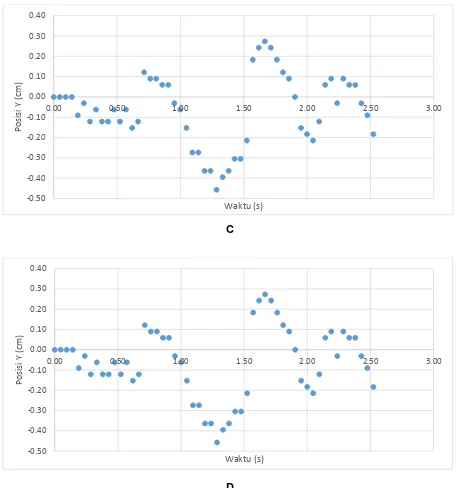
4.2 Pembahasan
Setelah mendapatkan posisi X dan posisi Y, kami menganalisis gerak dari Klann linkage.
Analisis ini meliputi perhitungan kecepatan linear, percepatan linear, dan percepatan vertikal.
Kemudian kami membuat grafik untuk membandingkan posisi, kecepatan, dan percepatan
terhadap waktu pada setiap medan.
0.00
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50
P
0.00 0.50 1.00 1.50 2.00 2.50 3.00
15
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50
P
0.00 0.50 1.00 1.50 2.00 2.50 3.00
16
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50
P
0.00 0.50 1.00 1.50 2.00 2.50 3.00
17
0.00 0.50 1.00 1.50 2.00 2.50 3.00
P
0.00 0.50 1.00 1.50 2.00 2.50 3.00
18
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50
Waktu (s)
0.00 0.50 1.00 1.50 2.00 2.50 3.00
Waktu (s)
Vx ax ay
A
19
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50
Waktu (s)
0.00 0.50 1.00 1.50 2.00 2.50 3.00
Waktu (s)
Vx ax ay
C
D
20
Dari grafik-grafik di atas, dapat dihitung nilai sebaran dari kecepatan dan percepatan pada masing-masing medan sebagai berikut :
Medan Rata
linkage untuk berjalan di medan yang lebih tidak rata. Setelah diteliti, ternyata model Klann
linkage yang kami gunakan dalam percobaan memiliki kelemahan. Kelemahannya adalah
tinggi dari langkah yang dihasilkan kaki depan dan kaki belakang berbeda. Kaki depan
menghasilkan tinggi langkah sekitar 1,2 cm, sedangkan kaki belakang menghasilkan tinggi
langkah sekitar 0,2 cm. Perbedaan ini membuat Klann linkage mudah tersandung pada medan
yang tidak rata.
Kecepatan linear dari Klann linkage pada setiap medan hampir sama, sekitar 11 cm/s. Namun,
percepatan baik linear maupun vertikal menghasilkan nilai yang bervariasi pada
masing-masing medan.
Percepatan linear dan vertikal menghasilkan nilai simpangan baku yang sangat besar. Jika
dibandingkan dari 4 medan tersebut, percepatan linear menghasilkan nilai simpangan baku
yang lebih besar pada medan yang lebih tidak rata.
Namun pada medan 2, percepatan linear justru menghasilkan nilai simpangan baku yang
paling kecil. Hal ini mungkin dikarenakan pada medan 3 jarak antar stik es krim cukup dekat
yang membuat bentuk medannya cenderung datar. Sehingga Klann linkage dapat berjalan
21
Sedangkan pada medan 3, percepatan linear menghasilkan nilai simpangan baku paling besar
yaitu 98,324. Pada medan 3, meskipun jarak stik es cukup dekat, namun antar stik es krim
memiliki ketinggian yang berbeda. Hal ini membuat Klann linkage bergerak lebih tidak stabil
karena mudah tersandung.
Percepatan vertikal menggambarkan guncangan vertikal yang dialami Klann linkage. Pada
dasarnya, Klann linkage bergerak dengan cara melangkah, sehingga pada medan baik rata
maupun tidak rata akan selalu mengalami guncangan. Namun keunggulannya, pada medan
yang tidak rata Klann linkage mengalami guncangan yang besarnya hampir sama dengan
medan yang rata.
Nilai simpangan baku percepatan vertikal pada medan rata sebesar 60,373, sedangkan pada
medan 2 dan 3 berturut-turut menghasilkan nilai simpangan baku sebesar 37,863 dan
53,9067. Hal ini menunjukkan pada medan yang tidak rata, Klann linkage mengalami
guncangan yang justru lebih kecil.
Tetapi, seharusnya pada medan rata Klann linkage mengalami guncangan yang lebih kecil.
Ketidakcocokan ini mungkin disebabkan karena beberapa faktor seperti kurangnya data yang
digunakan dalam analisis, kesalahan dalam pengambilan data dan penentuan koordinat, dan
lain-lain.
Dari pembahasan, kami menyimpulkan Klann linkage yang kami gunakan belum dapat
berjalan secara optimal di berbagai medan. Hal ini terutama dikarenakan kelemahan dari
model Klann linkage seperti yang telah dijelaskan di atas. Sehingga pada medan yang tidak
rata, Klann linkage cenderung bergerak tidak teratur dan mudah tersandung.
Jika ditinjau dari percepatan vertikal, gerak Klann linkage masih terbilang tidak stabil.
Meskipun nilai rata-rata percepatan vertikal mendekati nol, namun simpangan bakunya masih
22
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari semua rangkaian percobaan yang kami lakukan, kami dapat menyimpulkan hal-hal
sebagai berikut:
Gerak yang dihasilkan Klann linkage masih belum optimal karena Klann linkage mudah tersandung dan keluar dari lintasan.
Gerak Klann linkage masih belum stabil karena pada setiap medan mengalami guncangan yang cukup besar.
5.2 Saran
Untuk mengembangkan penelitian ini lebih lanjut, dapat dicoba model Klann linkage dengan
perbandingan panjang kaki yang berbeda. Pengambilan data dapat diperbanyak. Selain itu,
ruang lingkup kajian juga dapat diperluas, misalnya medan-medan pada percobaan dibuat
23
DAFTAR PUSTAKA
https://en.wikipedia.org/wiki/Multiple_exposure
http://www.seputarfotografi.com/apa-itu-exposure-dalam-fotografi/
https://en.wikipedia.org/wiki/Linkage_(mechanical)
https://en.wikipedia.org/wiki/Leg_mechanism
https:/en.wikipedia.org/wiki/Klann_linkage#
24
LAMPIRAN
Hasil foto gerak Klann linkage pada medan rata
25
Hasil foto gerak Klann linkage pada medan 2
27
Tabel Kecepatan dan Percepatan
Waktu
Percepatan (cm/s2) Kecepatan Linear (cm/s)
Percepatan (cm/s2) Horizontal Vertikal Horizontal Vertikal
28
Percepatan (cm/s2) Kecepatan Linear (cm/s)
Percepatan (cm/s2) Horizontal Vertikal Horizontal Vertikal