BAB 2
LANDASAN TEORI
2.1 Tinggi Badan
Tinggi badan seseorang menunjukkan latar belakang genetik dan rutin digunakan untuk mengevaluasi proporsi tubuh. Tinggi badan juga dapat dibandingkan dengan hasil pengukuran sebelumnya untuk melihat ada tidaknya penurunan densitas tulang atau osteoporosis, dimana tinggi badan akan menurun sejalan dengan progresi penyakit. Untuk mengukur tinggi badan seseorang dengan cara berdiri tegak, tanpa sepatu, bersandar pada bagian permukaan vertikal yang datar dari suatu alat pengukur, misalnya tiang pada alat pengukur tinggi badan.
Seperti halnya komputer, sebuah alat ukur tinggi badan digital terdiri dari dua bagian yang saling berhubungan dimana setiap bagian mempunyai konstruksi dan fungsi yang berbeda antara bagian yang satu dengan bagian yang lain. Begitu pula dengan alat pengukur tinggi badan digital. Dalam pembuatannya, alat pengukur tinggi badan digital membutuhkan kedua bagian tersebut yaitu perangkat keras (hardware) dan perangkat lunak (software).
2.2 Gelombang Ultrasonic
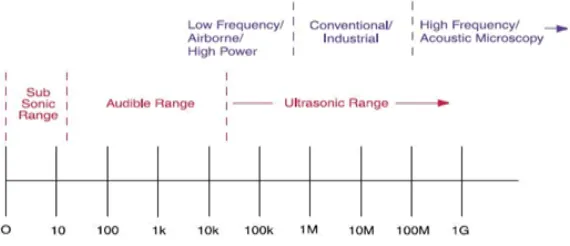
Gambar 2.1 Pembagian Rentang Frekuensi Gelombang Akustik
Gelombang ultrasonik merupakan gelombang mekanik dengan frekuensi diatas 20 kHz sehingga tidak terdengar oleh telinga manusia. Gelombang ini banyak dimanfaatkan dalam bidang dunia industri, maritim, dan kedokteran. Dalam dunia industri sering dijumpai pengukuran ketinggian atau sound test untuk melihat retakan pada material, sedangkan didunia kedokteran gelombang ultrasonik digunakan sebagai ultrasonografi pada alat USG.
2.3 Perangkat Keras (Hardware)
Hardware merupakan perangkat fisik dari sebuah sistem sehingga dapat dilihat oleh mata. Hardware yang dibuat dapat dikelompokkan menjadi dua bagian yaitu:
1. Bagian Mekanis
Bagian mekanis adalah hardware beroperasi sesuai dengan input yang diberikan dan memberikan hasil nilai berupa output terhadap objek yang dieksekusi melaui sensor ultrasonic yang di dapat dari hasil ukur jarak objek terhadap sensor menurut ukuran yang telah ditetapkan sebelumnya.
2. Bagian Elektronis
Bagian elektronis terbuat dari komponen-komponen elektronika yang dirangkai sedemikian rupa sehingga bisa mendukung kinerja mekanis. Bagian elektronis terdiri dari dua bagian penting yaitu:
a. Sensor
2.3.1 Sensor
Sensor adalah suatu variabel yang digunakan untuk mengubah besaran fisik menjadi tegangan dan arus listrik. Sensor sering digunakan untuk pendeteksian pada saat melakukan pengukuran atau pengendalian.
Adapun jenis-jenis dari sensor diantaranya: 1. Sensor Suhu
Sensor suhu merupakan sebuah sensor yang digunakan untuk mengubah besaran panas menjadi besaran listrik yang dapat dianalisis besarnya. Komponen elektronika untuk keperluan pengukuran suhu yang paling mudah ditemukan adalah Negative Temperature Coefficient (NTC) dan Positive
Temperature Coefficient (PTC). Keduanya adalah resistor yang hambatannya
dapat berubah sesuai dengan suhu di sekitarnya. Hambatan NTC akan turun apabila suhu di sekitarnya naik, sedangkan hambatan PTC akan naik apabila suhu di sekitarnya naik.
2. Sensor Mekanik
Sensor mekanis digunakan untuk mendeteksi posisi, pergerakan, kecepatan, atau tekanan pada suatu benda. Contohnya adalah strain gauge dan bourdon tube (untur mengukur tekanan) potensiometer (untuk mengukur sudut putaran), dan load cell (untuk mengukur gaya). Sensor ini memanfaatka perubahan nilai hambatannya. Dengan demikian, bila hambatannya berubah, maka output sensor akan berubah.
3. Sesor Cahaya atau Optik
4. Sensor Jarak
Sensor jarak adalah sebuah sensor yang mampu mendeteksi keberadaan benda di dekatnya tanpa kontak fisik. Sensor jarak sering memancarkan elektromagnetik atau berkas radiasi elektromagnetik (inframerah, misalnya), dan mencari perubahan dalam bidang atau sinyal kembali. Salah satunya adalah sensor Ultrasonic PING))) buatan PARALLAX.
2.3.1.1Tranduser ultrasonic
Sensor ultrasonic merupakan sensor yang bekerja dengan memanfaatkan gelombang ultrasonic dengan cara memancarkan gelombang ultrasonik pada frekuensi 40 KHz dan kemudian pantulan dari objek akan ditangkap oleh receiver sensor, dengan demikian akan terjadi beda potensial pada kedua blok transmitter dan receiver. Beda potensial inilah yang akan membangkitkan pulsa, sehingga lamanya pancaran dari
transmitter yang memantul pada objek dan tertangkap oleh receiver dapat
mengindikasi jarak suatu objek dari pangkal sensor.
2.3.1.2Sensor ultrasonic PING))) parallax
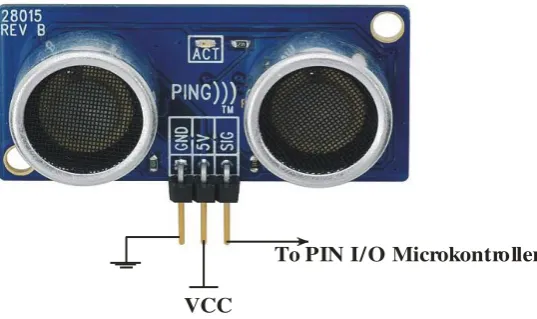
Sensor PING))) merupakan sensor ultrasonic yang dapat mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonic dengan frekuensi 40 KHz dan kemudian mendeteksi pantulannya. Tampilan sensor jarak PING))) ditunjukkan pada Gambar 2.2 berikut.
VCC
To PIN I/O Microkontroller
Spesifikasi sensor:
1. Kisaran pengukuran 2 cm – 3 m.
2. Input trigger–positive TTL pulse, 2 uS min., 5 uS tipikal. 3. Echo hold off 750 uS dari fall of trigger pulse.
4. Delay before next measurement 200 uS.
Burst indicator LED menampilkan aktifitas sensor. Sensor ini dapat
mengukur jarak antara 3 cm sampai 300 cm. Keluaran dari sensor ini berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS. Pada dasanya, PING))) terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonic dan sebuah mikropon ultrasonic. Speaker ultrasonic mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonic berfungsi untuk mendeteksi pantulan suaranya. Sensor ultrasonic memiliki 3 kaki (pin) yang berfungsi sebagai berikut:
1. Pin Ground
2. Pin Vcc
3. Pin Input dan Output
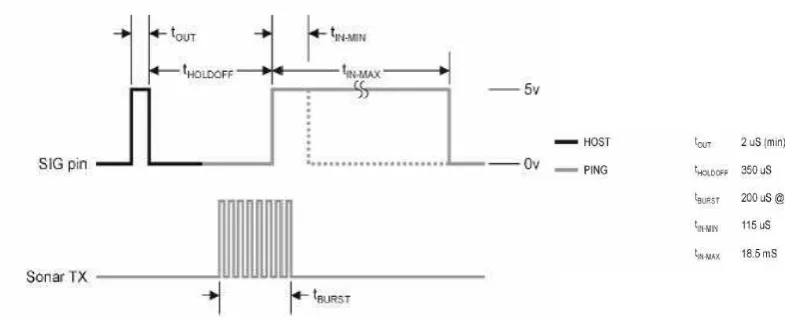
Pin signal dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun. PING))) hanya akan mengirimkan suara ultrasonic ketika ada pulsa trigger dari mikrokontroler (Pulsa hight selama 5 uS). Suara ultrasonic dengan frekuensi sebesar 40 KHz akan dipancarkan selama 200 uS. Suara ini akan merambat di udara dengan kecepatan 344 m/detik, mengenai objek untuk kemudian terpantul kembali ke PING))). Selama menunggu pantulan, PING))) akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan terdeteksi oleh PING))). Oleh karena itu lebar pulsa tersebut dapat merepresentasikan jarak antara PING))) dengan objek.
2.3.1.3Prinsip kerja sensor ultrasonic PING)))
Gelombang ultrasonic adalah gelombang dengan besar frekuensi diatas frekuensi gelombang suara yaitu lebih dari 20 KHz. Seperti telah disebutkan bahwa sensor
ultrasonic terdiri dari rangkaian pemancar ultrasonic yang disebut transmitter dan
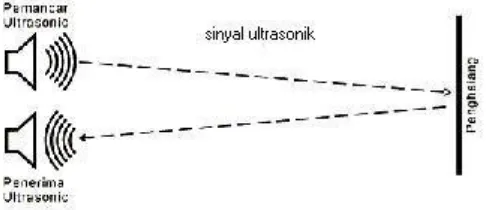
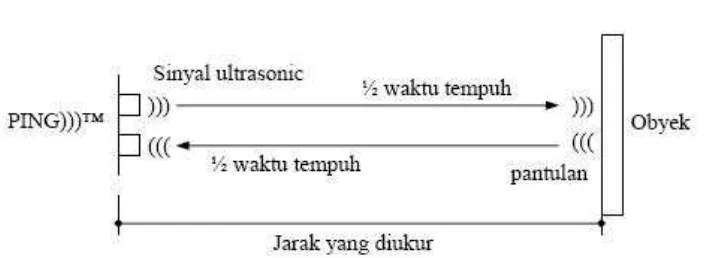
dibangkitkan akan dipancarkan dari transmitterultrasonic. Ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan, dan diterima oleh receiver ultrasonic. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya (bidang pantul). Prinsip kerja dari sensor ultrasonic dapat ditunjukkan dalam Gambar 2.3 berikut.
Gambar 2.3 Prinsip Kerja Sensor Ultrasonic
Prinsip kerja dari sensor ultrasonic adalah sebagai berikut:
1. Sinyal dipancarkan oleh pemancar ultrasonic. Sinyal tersebut berfrekuensi diatas 20 kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40 kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonic.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal/gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonic.
3. Setelah sinyal tersebut sampai di penerima ultrasonic, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus:
S =
(v x t)2 ... (2.1)
Dimana:
S = Jarak pantulan (m)
Dari rumus tersebut maka dapat dihitung berapa lama waktu yang dibutuhkan untuk jarak tiap 1 cm yaitu:
10−2m =344 𝑚/𝑠 ∗ 𝑡 2
𝑡
=
2∗10−2 𝑚
344 𝑚/𝑠
𝑡 = 58,14 10−6𝑠
𝑡 = 58,14 µ𝑠
Maka didapat setiap 1 cm gelombang ultra sonic akan membutuhkan waktu tempuh (t) yaitu sebesar 58,14 µ𝑠.
Gambar 2.4 Diagram Waktu Sensor Ultrasonic PING)))
𝑆
=
𝑡𝐼𝑁 𝑠∗ 344 𝑚/𝑠2 ...(2.2)
Gambar 2.5 Jarak Ukur Sensor Ultrasonic PING)))
2.3.2 Mikrokontroler
Dalam merancang aplikasi elektronika digital dibutuhkan sebuah alat/komponen yang dapat menghitung, mengingat, dan mengambil pilihan serta digunakan sebagai pemrosesan data. Kemampuan ini dimiliki oleh sebuah komputer, namun tidaklah efisien jika harus menggunakan komputer hanya untuk keperluan tersebut. Untuk itu peran komputer dapat digantikan dengan sebuah minimun sistem mikrokontroler.
Sistem kerja Mikrokontroler sama dengan mikroprosesor, namun mikrokontroller lebih efisien untuk keperluan aplikasi elektronika digital sederhana dikarenakan pada device ini sudah terdapat RAM, ROM, dan prosesor dalam satu chip. Mikrokontroler seri MCS-51 termasuk sederhana, murah dan mudah didapat dipasaran. Salah satu mikrokontroler seri MCS-51 adalah mikrokontroler AT89S51.
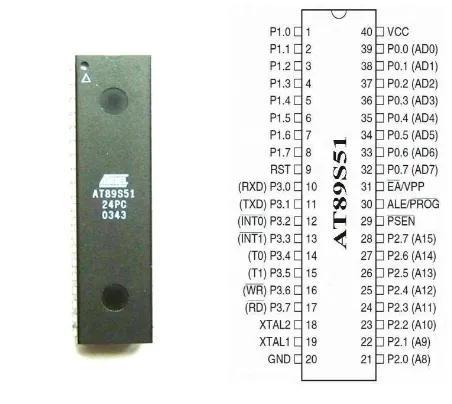
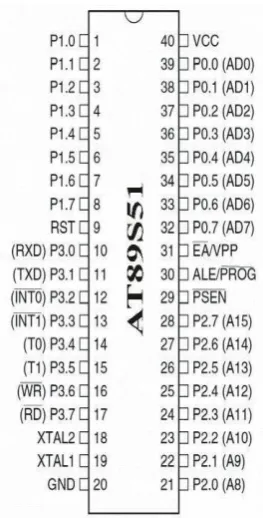
2.3.2.1 Arsitektur mikrokontroler AT89S51
Gambar 2.6 Arsitektur dan Susunan Pin Mikrokontroler AT89S51
Beberapa kemampuan (fitur) yang dimiliki mikrokontroler AT89S51 adalah sebagai berikut:
1. Memiliki 4K FlashErasable Programmable Read Only Memory (EPROM) yang digunakan untuk menyimpan program.
Flash Erasable Programmable Read Only Memory (EPROM) dapat ditulis dan
dihapus sebanyak 1000 kali (menurut manual). 2. Memiliki internal RAM 128 byte.
Random Access Memory (RAM), suatu memori yang datanya akan hilang bila
catu padam, diakses secara random, tidak sekuensial, artinya dialamat mana saja dapat dicapai secara langsung dengan cepat.
3. 4 buah 8-bit I/O (Input/Output) port
Port ini berfungsi sebagai terminal input dan output. Selain itu, dapat digunakan sebagai terminal komunikasi paralel, serta komunikasi serial (pin10 dan 11). 4. Dua buah timer/counter 16 bit.
5. Operasi clock dari 0 hingga 24 MHz
2.3.2.2Spesifikasi pada mikrokontroler AT89S51
Untuk mendukung fungsi pengendalian, mikrokontroler AT89S51 memiliki spesifikasi yaitu:
1. Tegangan kerja 4-5.0V .
2. Bekerja dengan rentang 0 – 33MHz. 3. 256x8 bit RAM internal.
4. 32 jalur I/0 dapat deprogram. 5. 3 buah 16 bit Timer/Counter. 6. 8 sumber interrupt.
7. Saluran full dupleks serial UART yang dapat digunakan sebagai media transfer data serial atau pun parallel ke PC.
8. Dua data pointer.
Keterangan fungsi dari masing-masing pin adalah sebagai berikut: Pin 40 Vcc, Masukan catu daya +5 volt DC
Pin 20 Gnd, Masukan catu daya 0 volt DC
Pin 32-39 P0.0-P0.7, Port input/output delapan bit dua arah yang juga dapat berfungsi sebagai bus data dan bus alamat bila mikrokontroler menggunakan memori luar (eksternal).
Pin 1-8 P1.0-P1.7, Port input/output dua arah delapan bit dengan internal pull up.
Pin 10-17 P3.0-P3.7Port input/output delapan bit dua arah, selain itu Port 3 juga memiliki alternativef fungsi sebagai :
RXD (pin 10) Port komunikasi input serial TXD (pin 11) Port komuikasi output serial
INT0 (pin 12) Saluran Interupsi eksternal 0 (aktif rendah) INT1 (pin 13) Saluran Interupsi eksternal 1 (aktif rendah) T0 (pin 14) Input Timer 0
T1 (pin 15) Input Timer 1
WR (pin 16) Berfungsi sebagai sinyal kendali tulis, saat prosesor akan menulis data ke memori I/O luar.
RD (pin 17) Berfungsi sebagai sinyal kendali baca, saat prosesor akan membaca data dari memori I/O luar.
Pin 9 RESET, Pin yang berfungsi untuk mereset mikrokontroller AT89S51 ke keadaan awal.
Pin 29 PSEN (Program Store Enable), Sinyal pengontrol yang berfungsi untuk membaca program dari memori eksternal.
Pin 31 EA, Pin untuk pilihan program, menggunakan program internal atau eksternal. Bila „0‟, maka digunakan program eksternal.
Pin 19 X1, Masukan ke rangkaian osilator internal. Sumber osilator eksternal atau quartz crystal kristal dapat digunakan.
Pin 18 X2, Masukan ke rangkaian osilator internal, koneksi quartz crystal atau tidak dikoneksikan apabila digunakan eksternal osilator.
2.3.2.3Struktur pengoperasian port
Struktur pengendalian port teridi dari: 1. Port input/output
One chip mikrokontroller ini memiliki 32 jalur port yang dibagi menjadi 4 buah port 8 bit. Masing-masing port ini bersifat bidirectional sehingga dapat digunakan sebagai input port atau output port. Pada bok diagram AT89C51 dapat dilihat latch tiap bit pada keempat port : port 0, port 1, port 2, port 3. Masing-masing jalur port terdiri dari latch, output driver dan input buffer. Port 0 dan port 2 dapat digunakan sebagai saluran data dan alamat. Port 0 sebagai saluran data, sedangkan port 2 sebagai saluran data dan alamat sekaligus yang dimultipleks. Untuk mengakses memory eksternal, port 0 akan mengeluarkan alamat bawah memori eksternal yang dimultipleks dengan data yang dibaca dan ditulis. Sedangkan port 2 mengeluarkan bagian atas memory eksternal sehingga total alamat semuanya 16 bit.
Latch yang digunakan dapat dipresentasikan dengan D-Flip Flop. Data dari
harus 1. Untuk port 1, 2 dan 3, pin-pin akan di pull-up tinggi oleh pull-up internal, dan bisa juga di pull-up rendah dengan sumber eksternal.
2. Timer/Counter
One chip mikrokontroller ini memilik dua timer yang dapat dikonfigurasikan
beroperasi sebagai timer atau counter. Saat berfungsi sebagai timer, isi register
timer ditambah 1 untuk tiap siklus mesin, sedangkan untuk fungsi counter isi
register akan bertambah 1 setiap ada transisi sinyal pada pin input eksternal. Pada pemanfaatan sebagai counter, sinyal input yang dimaksudkan dapat berupa low level atau falling edge trigger. Counter akan mencacah setiap masukan yang ada sesuai inisialisasi harga awal dari counter pada nilai hitungan untuk tiap
sampling. Inisialisasi harga awal ini berupa nilai preset negatif counter yang diatur
sebelum counter dijalankan.
Demikian halnya dengan pemanfaatan timer yang memerlukan inisialisasi awal berupa konstanta waktu yang menentukan sampai berapa lama akan terjadi roll over. Penentuan harga preset ini berhubungan dengan penggunaan frekuensi clock dari sistem penentu waktu sampling dari counter untuk mencacah suatu pulsa masukan dari luar dengan memanfaatkan kontrol interupsi yang ada serta pengaturan program. Sebagai tambahan pada pemilihan countr/timer, timer 0 dan
timer 1 mempunyai 4 buah modul yang dapat dipilih dengan menentukan
pasangan bit M0 dan M1 pada register TMOD. Untuk pemilihan timer/counter dikontrol dengan bit C/T di TMOD.
Mode 0 Pada mode ini timer register dikonfigurasikan sebagai register 13 bit. Ke-13 bit register tersebut terdiri dari 8 bit TH1 dan 5 bit TL1. Selama perhitungan roll over dari semua 1 ke semua 0, TF1 (Timer Interrupt Flag) di set. Pada dasarnya operasi mode 0 sama untuk timer 0 dan timer .
Mode 1 Mode 1 adalah timer register 16 bit dan dapat generator boudrate. Operasi mode 1 sama dengan mode 0.
mereload TL1 dengan isi TH1. Setelah reload isi TH1 tidak akan berubah. Operasi mode ini juga sama dengan timer/counter 0.
Mode 3 Pada mode ini timer 1 tidak akan bekerja. Sedangkan timer 0 menjadi 2
counter yang terpisah. TL0 digunakan sebagai bit kontrol untuk timer
0; C/T, GATE, TR0, INT0, dan TF0 seolah-olah mengontrol timer 1.
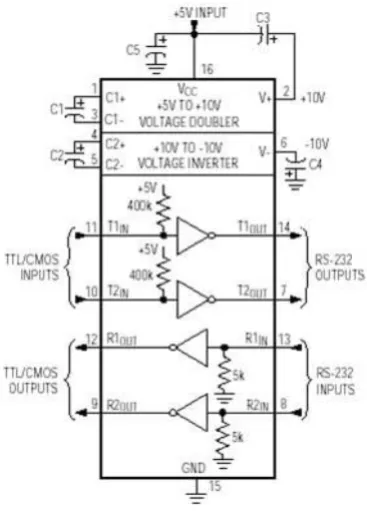
2.3.3 IC MAX232
Untuk dapat berkomunikasi antara mikrokontroler dengan komputer, maka diperlukan suatu penyetaraan level tegangan. Besarnya level tegangan komunikasi serial (Level Tegangan RS232) adalah -25 s.d -3 V untuk logika hight (1) dan +3 s.d +25 V untuk logika low (0). Hal ini sangat berbeda dengan level tegangan pada mikrokontroller (Level Tegangan TTL/CMOS) dimana untuk logika hight (1) level tegangannya adalah 5 V dan untuk logika low (0) level tegangannya adalah 0 V. Oleh karena itu diperlukan sebuah pengantarmuka yang dapat menyamakan level tegangan dari komunikasi serial pada komputer dengan mikrokontroller, yaitu IC RS232 produksi MAXIM yang disebut MAX232.
Gambar 2.8 Skema IC MAX232
2.3.4 Serial RS232
RS232 adalah standar komunikasi serial yang digunakan untuk koneksi periperal ke periperal. Biasa juga disebut dengan jalur I/O. Contohnya adalah koneksi antara komputer dengan modem, atau komputer dengan mouse bahkan bisa juga antara komputer dengan komputer, semua biasanya dihubungkan lewat jalur port serial RS232.
Standar ini menggunakan beberapa piranti dalam implementasinya. Paling umum yang dipakai adalah plug/konektor DB9 atau DB25. Untuk RS232 dengan konektor DB9, biasanya dipakai untuk mouse, modem, kasir register dan lain sebagainya, sedang yang konektor DB25, biasanya dipakai untuk joystik game.
Standar RS232 ditetapkan oleh Electronic Industry Association (EIA) dan
Telecomunication Industry Association (TIA) pada tahun 1962. Nama lengkapnya
adalah EIA/TIA-232 Interface Between Data Terminal Equipment dan Data
Circuit-Terminating Equipment Employing Serial Binary Data Interchange.
Perangkat lainnya itu seperti modem, mouse, cash register dan lain sebagainya. Serial port RS232 pada konektor DB9 memiliki pin 9 buah dan pada konektor DB25 memiliki pin 25 buah. Fungsi dari masing-masing pin adalah sebagai berikut.
Pin DB9 Pin DB25 Singkatan Keterangan Fungsi
Pin 3 Pin 2 TD Transmiter Pin 1 Pin 8 CD Carrier Detect Saat perangkat mendeteksi
2.3.4.1 Prinsip kerja RS232
Ada dua hal pokok yang diatur pada standar RS232 diantaranya adalah: 1. Bentuk sinyal
2. Level tegangan yang dipakai
RS232 dibuat pada tahun 1962, jauh sebelum IC TTL populer, oleh karena itu level tegangan yang ditentukan untuk RS232 tidak ada hubungannya dengan level tegangan
Transistor Transistor Logic (TTL).
Sebuah penggerak (driver) harus mampu menangani arus ini tanpa mengalami kerusakan. Selain mendeskripsikan level tegangan, standard RS232 juga menentukan jenis-jenis sinyal yang dipakai mengatur pertukaran informasi antara Data Terminal
Equiepment (DTE) dan Data Circuit Equiepment (DCE), semuanya terdapat 2 jenis
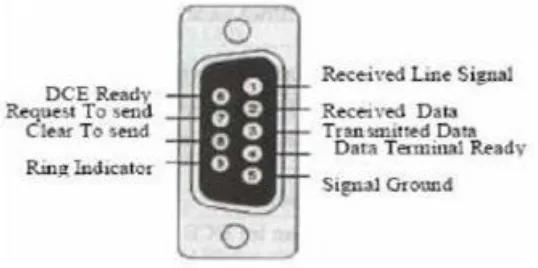
sinyal tapi yang umum dipakai hanyalah 9 jenis sinyal. Sesuai dengan konektor yang sering dipakai dalam standard RS232, untuk sinyal yang lengkap dipakai konektor DB25, sedangkan konektor DB9 hanya bisa dipakai untuk 9 sinyal yang umum dipakai seperti Gambar 2.9 berikut.
Gambar 2.9 Susunan pin DB9
Sinyal-sinyal tersebut ada yang menuju ke Data Circuit Equipment (DCE) ada juga yang berasal dari DCE. Bagi sinyal yang menuju ke DCE artinya Data Terminal
Equiepment (DTE) berfungsi sebagai output dan DCE berfungsi sebagai input,
2.4 Perangkat Lunak (Software) Sistem
2.4.1 Bahasa Assembly
Secara fisik, kerja dari sebuah mikrokontroller dapat dijelaskan sebagai siklus pembacaan intruksi bahasa mesin (Assembly) yang tersimpan di dalam memori. Mikrokontroller menentukan alamat dari memori program yanng akan dibaca, dan melakukan proses baca data di memori. Data yang dibaca diinterpretasikan sebagai intruksi. Alamat intruksi disimpan oleh mikrokontroller di register atau yang sering disebut sebagai program counter. Di sisi lain perbedaan bahasa assembly untuk mikrokontroller yaitu seperti intruksi MOV untuk Byte pada pengalamatan bit dikelompokkan sesuai dengan metode pengalamatan (addressing modes). Mode pwngalamatan menjelaskan bagaimana operand dioprasikan. Berikut bentuk program bahasa assembly sesara umum:
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah bahasa assembly untuk MCS-51. angka 51 merupakan jumlah instruksi pada bahasa ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10 instruksi. Instruksi –instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh : pengisian nilai secara langsung MOV R0,#20h
Mnemonic Operan 1 operan 2 komentar
(opcode)
Perintah di atas berarti : isikan nilai 20 Heksadesimal ke register 0 (R0). Tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai.
Contoh pengisian nilai secara tidak langsung MOV 20h,#80h
...
...
MOV R0,20h
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20 Heksadesimal ke register 0 (R0).Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai
register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh , MOV R0,#80h
Loop: ...
...
DJNZ R0,Loop
...
R0 - 1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
...
...
TUNDA:
...
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan. Contoh,
ACALL TUNDA ...
TUNDA: ... RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh: Loop:
...
...
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika hight (1).
Contoh: Loop:
JB P1.0,Loop
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0).
Contoh: Loop:
JNB P1.0,Loop
...
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu.
Contoh: Loop:
...
CJNE R0,#20h,Loop
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya.
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
...
10. Instruksi INC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
...
INC R0 R0 = R0 + 1 ...
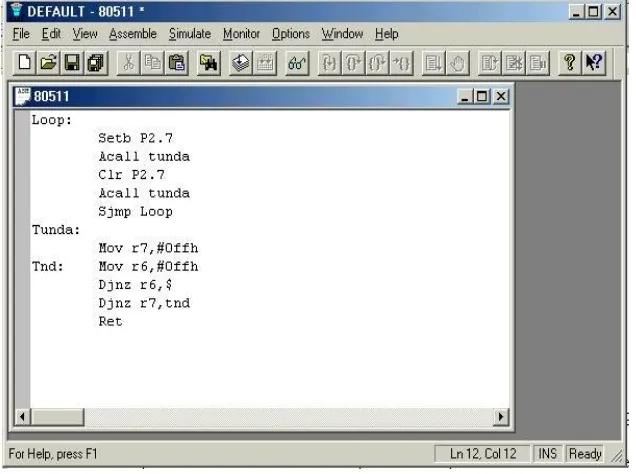
2.4.2 Software 8051 editor, assembler, simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti Gambar 2.10 berikut ini.
Gambar 2.10 Editor, Assembler, Simulator (IDE)
nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu sampai tidak ada pesan kesalahan lagi.Software 8051IDE ini berfungsi untuk merubah program yang dibuat di-converter ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat meng-compile program. Bilangan heksadesimal inilah yang akan di-download ke mikrokontroler.
2.4.3 Software downloader
Untuk men-download bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan software ISP- Flash Programmer 3.0a berupa software open source dan dapat didownload dari internet. Tampilannya seperti Gambar 2.11 berikut ini.
Gambar 2.11 Tampilan software downloader
2.4.4 Visual basic 6.0
Pada projek sistem akuisisi data pada SCADA, Grapic User Interface (GUI) sangat diperlukan sebagai antar muka keluaran data output objek yang dikontrol. Rancang bangun dari interfacing dapat dibangun menggunakan Microsoft Visual Basic 6.0.
Microsoft Visual Basic merupakan sebuah bahasa pemrograman yang menawarkan Integrated Development Environment (IDE) untuk membuat program perangkat lunak berbasis sistem operasi Microsoft Windows dengan menggunakan model pemrograman (COM). Visual Basic merupakan turunan bahasa pemrograman BASIC dan menawarkan pengembangan perangkat lunak komputer berbasis GUI.
Visual Basic 6.0 adalah perkembangan dari versi sebelumnya dengan beberapa penambahan komponen yang sedang tren saat ini, seperti kemampuan pemrograman internet dengan DHTML (Dynamic HyperText Mark Language), dan beberapa penambahan fitur database dan multimedia yang semakin baik. Sampai saat buku ini ditulis bisa dikatakan bahwa Visual Basic 6.0 masih merupakan pilih pertama di dalam membuat program aplikasi yang ada di pasar perangkat lunak nasional. Hal ini disebabkan oleh kemudahan dalam melakukan proses development dari aplikasi yang dibuat. Interface antar muka Visual Basic 6.0, berisi menu, toolbar, toolbox, form, project explorer dan property seperti terlihat pada Gambar 2.12 berikut:
2.4.4.1 Konsep dasar pemrograman dalam visual basic 6.0
Konsep dasar pemrograman Visual Basic 6.0, adalah pembuatan form dengan mengikuti aturan pemrograman Properti, Metode dan Event. Keterangan aturan tersebut yaitu:
1. Properti
Setiap komponen di dalam pemrograman Visual Basic dapat diatur propertinya sesuai dengan kebutuhan aplikasi. Property yang tidak boleh dilupakan pada setiap komponen adalah “Name”, yang berarti nama variabel (komponen) yang akan digunakan dalam scripting. Properti “Name” ini hanya bisa diatur melalui jendela Property, sedangkan nilai peroperti yang lain bisa diatur melalui script seperti berikut.
Command1.Caption=”Play” Text1.Text=”Visual Basic” Label1.Visible=False
Timer1.Enable=True
2. Metode
Bahwa jalannya program dapat diatur sesuai aplikasi dengan menggunakan metode pemrograman yang diatur sebagai aksi dari setiap komponen. Metode inilah tempat untuk mengekpresikan logika pemrograman dari pembuatan suatu prgram aplikasi.
3. Event
2.5 Bagan Alir Sistem (System Flowchart)
Bagan alir sistem (system flowchart) merupakan bagan yang menunjukkan arus pekerjaan dari sistem secara keseluruhan, menjelaskan urutan dari prosedur-prosedur yang ada dalam sistem serta menunjukkan apa yang ada dalam sistem. Adapun sismbol-simbol dalam flowchart seperti table 2.1 berikut.
Tabel 2.1 simbol-simbol flowchart program
Simbol Nama Keterangan Fungsi
TERMINAL Permulaan / akhir suatu proses
GARIS ALIR Arah aliran program
PERSIAPAN Proses inilisasi/pemberian nilai awal suatu besaran
PROSES Proses pengolahan data
INPUT / OUTPUT DATA
proses input/output data, prameter, informasi
PROSES TERDEFENISI
Permulaan sub program/proses menjalankan sub program
KEPUTUSAN Perbandingan pernyataan, seleksi kondisi di dalam program
PENGHUBUNG
2.5.1 Data Flow Diagram (DFD)
Data Flow Diagram (DFD) adalah alat pembuatan model network dengan menggunakan notasi-notasi untuk menggambarkan arus dari data sistem yang bertujuan untuk membantu memahami sistem secara logika, terstruktur dan jelas. Data Flow Diagram (DFD) menggambarkan arus data dari suatu sistem informasi, baik sistem lama maupun sistem baru secara logika tanpa mempertimbangkan lingkungan fisik di mana data tersebut berada. Adapun simbol-simbol Data Flow Diagram (DFD) dapat dilihat pada tabel 2.2 berikut.
Table 2.2 Simbol-simbol DFD
Simbol Nama fungsi
External Entity
External Entity dapat berupa orang,
sekelompok orang, organisasi, dari sistem yang berada lingkungan luarnya yang akan memberikan inputan atau memberikan output dari sistem.
ALUR DATA (DATA FLOW)
Alur ini mengalir diantara proses, data store, dan terminator. Berfungsi untuk menunjukkan arus data yang dapat berupa masukkan untuk sistem
Process (Proses)
Tahapan diagram arus data dibagi dalam beberapa bagian diantaranya: 1. Diagram Konteks
Diagram konteks (context diagram) adalah diagram tingkat atas, merupan diagram dari sebuah sistem yang menggambarkan aliran data yang masuk dan keluar dari sistem dan yang masuk dan keluar dari entitas luar.
2. Diagram Nol