Fakultas Ilmu Komputer
Universitas Brawijaya
992
Pengembangan Sistem Pengenalan Bahasa Isyarat dengan Sensor
Akselerometer menggunakan Metode Naïve Bayes
Gunawan Wahyu Andreanto1, Dahnial Syauqy2, Hurriyatul Fitriyah3 Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya
Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Komunikasi merupakan sarana penyampaian informasi dalam kehidupan sosial. Namun, penyandang tuna rungu wicara kesulitan dalam bertukar informasi karena memiliki keterbatasan. Solusi Pemerintah Indonesia akan masalah ini ialah dibakukannya Sistem Isyarat Bahasa Indonesia (SIBI). Sebelumnya telah dilakukan penelitian terkait pengenalan isyarat alfabet SIBI dengan sensor flex dan MPU6050 menggunakan metode Naïve Bayes. Namun dari 130 kali pengujian, penelitian tersebut hanya menghasilkan akurasi sebesar 43,85%. Minimnya akurasi disebabkan oleh keterbatasan pembacaan sensor flex dalam membaca orientasi. Dari permasalahan tersebut dilakukan penelitian pengembangan guna meningkatkan akurasi pengenalan isyarat SIBI. Pada penelitian ini terdapat 6 unit MPU6050 yang berfungsi sebagai pembaca orientasi jari dan punggung tangan. Pengenalan isyarat menggunakan metode Naïve Bayes bergantung pada pembacaan orientasi sensor. Berdasarkan hasil pengujian, didapatkan persentase kesesuaian data antara kontroler dan aplikasi Android sebesar 100% sehingga aplikasi dapat digunakan sebagai media representasi data, Mean Absolute Persentage Error (MAPE) pembacaan sensor sebesar 1,471% dari 24 kali pengujian, tingkat akurasi klasifikasi sebesar 92,31% dari 78 kali pengujian, serta rata-rata waktu pemrosesan sebesar 6,15 ms dari 20 kali pengujian. Kata kunci: klasifikasi, Naïve Bayes, tuna rungu, bahasa isyarat, MPU6050
Abstract
Communication is the process of delivering information in social life. However, people with hearing impairments have difficulty exchanging information because of their limitations. The Indonesian Government's solution to this problem is the standardization of the Indonesian Sign Language System (SIBI). Previous research has been carried out related to SIBI alphabet sign recognition with flex sensor and MPU6050 using the Naïve Bayes method. However, from 130 tests, the research only produced an accuracy about 43.85%. The problem is due to the limitations of the flex sensor orientation reading accuracy. From these, development research was carried out to improve the accuracy of SIBI sign recognition. From these, development research was carried out to improve the accuracy of SIBI sign recognition. In this study, there were 6 units of MPU6050 that functioned as finger and opisthenar orientation readers. Sign recognition using the Naïve Bayes method based on the sensor orientation reading. The research produces data suitability between the controller and the Android application is 100% that the application can be used as a data media representation, Mean Absolute Percentage Error (MAPE) of the sensor readings at 1,471% from 24 tests, classification accuracy rate at 92.31% from 78 tests, and the average processing time at 20 ms from 20 tests.
Keywords: classification, Naïve Bayes, deaf, sign language, MPU6050
1. PENDAHULUAN
Komunikasi merupakan sebuah proses yang menghubungkan antara satu individu dengan individu yang lain. Komunikasi menjadi kebutuhan penting bagi manusia, khususnya manusia sebagai makhluk sosial. Komunikasi
dapat berperan sebagai media penyampaian informasi, kendali invidu ataupun kelompok, sarana motivasi, atau sekedar sarana untuk mengekspresikan diri (Robbins & Judge, 2008). Namun terdapat beberapa golongan individu yang kurang dapat berkomunikasi secara maksimal, yakni golongan tuna rungu wicara.
Pemerintah Indonesia menghadirkan sebuah sistem isyarat untuk menangani permasalahan tersebut yang kemudian dikenal sebagai Sistem Isyarat Bahasa Indonesia atau biasa dikenal dengan SIBI. Sistem ini menyelesaikan permasalahan komunikasi terhadap sesama pengguna isyarat, namun tidak dengan individu yang tidak mengenal isyarat. Maka pada penelitian ini dikembangkan sebuah sistem untuk mengenali isyarat untuk SIBI.
Pada tahun 2017, Zainul Bahar telah melakukan sebuah penelitian untuk mengenali isyarat untuk SIBI dengan merancang sebuah sarung tangan yang digunakan untuk membaca perubahan postur dari tangan. Penelitian dilakukan dengan menerapkan sensor lekuk atau
flex sebagai sensor utama sebagai perangkat
pembacaan lekukan setiap jari pada tangan. Digunakan juga sensor akselerometer pada ujung jari telunjuk sebagai perangkat pembacaan orientasi jari. Sistem terbagi ke dalam dua bagia yakni sarung tangan sebagai media akuisisi data dan smartphone sebagai media pemroses klasifikasi. Komunikasi antara dua bagian tersebut dilakukan melalui media bluetooth yang dipicu oleh tombol pada aplikasi android pada smartphone. Proses klasifikasi dilakukan setelah data berhasil diterima oleh smartphone, klasifikasi dilakukan dengan menggunakan metode Naïve Bayes. Penelitian ini menghasilkan akurasi klasifikasi sistem sebesar 43,85% yang diperoleh dari 130 pengujian klasifikasi (Bahar, 2017).
Berdasarkan penelitian sebelumnya, didapatkan kesimpulan bahwa sensor flex memiliki keterbatasan pembacaan, sensor hanya dapat membaca satu orientasi jari lurus dengan arah lekukannya. Hal tersebut menyebabkan kurangnya detil postur jari yang didapatkan sistem sehingga mempengaruhi nilai akurasi dari klasifikasi isyarat sistem. Pada penelitian ini sensor flex akan digantikan dengan sensor akselerometer dengan seri modul MPU6050. Sensor akselerometer memungkinkan sistem untuk dapat membaca detil postur tangan lebih banyak dikarenakan sensor dapat membaca orientasi objek untuk 3 sumbu orientasi yakni x, y, dan z. Untuk meringankan beban komunikasi maka proses klasifikasi dilakukan pada sarung tangan. Metode Naïve Bayes tetap digunakan sebagai metode klasifikasi untuk membandingkan hasil dari perubahan sensor. Diterapkan juga pembacaan kecepatan tangan yang digunakan sebagai pemicu terjadinya klasifikasi agar pengguna bisa lebih fokus dalam
menggunakan sistem. Media representasi data tetap menggunakan aplikasi Android
dikarenakan kekayaan fitur serta kemudahan pengoperasiannya. Data yang direpresentasikan berupa visual sebagai media interaksi dengan sahabat tuna rungu wicara, dan audio sebagai media interaksi dengan lawan komunikasi.
Dengan dilakukannya penelitian ini, diharapkan sistem mampu menghasilkan peningkatan nilai akurasi dibandingkan dengan penelitian sebelumnya. Sistem juga diharapkan tepat sasaran (efisien) serta dapat digunakan kapanpun dan dimanapun (praktis). Sehingga sistem bisa diterapkan sebagai media komunikasi untuk penyandang tuna rungu wicara.
2. PERANCANGAN
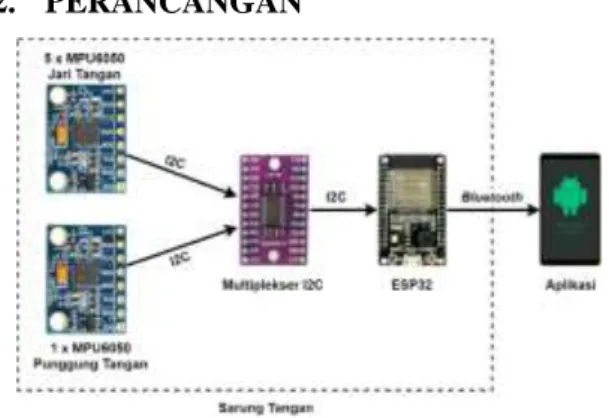
Gambar 1. Skema Perancangan Sistem Pada Gambar 1 terdapat 3 komponen utama penyusun sistem sarung tangan yakni ESP32, Multiplekser I2C, dan sensor MPU6050. Digunakan juga aplikasi android sebagai sistem pendukung. Sensor MPU6050 digunakan untuk membaca pergerakan serta orientasi tangan. Untuk membaca pergerakan tangan digunakan sensor giroskop, sedangkan untuk membaca orietnasi tangan digunakan sensor akselerometer pada MPU6050. Multiplekser I2C digunakan untuk menghubungkan antarmuka I2C kontroler terhadap setiap antarmuka I2C sensor. ESP32 digunakan sebagai perangkat pemroses dan kontroler, perangkat ini juga dilengkapi dengan modul bluetooth sehingga dapat digunakan sebagai pengiriman data. ESP32 sebagai pemroses memiliki tanggung jawab untuk mengolah data sensor dan melakukan klasifikasi isyarat, sedangkan sebagai kontroler ESP32 bertanggungjawab untuk mengambil keseluruhan data yang akan diproses. Aplikasi
android digunakan sebagai penghubung sistem
dengan pengguna melalui antarmukanya, yakni dapat berupa visual dan audio. Gambaran umum
Fakultas Ilmu Komputer, Universitas Brawijaya sistem pada penelitian ini dimulai dengan mengambil data terhadap keseluruhan sensor melalui perangkat multiplekser I2C, pengambilan data dilakukan menggunakan antarmuka I2C. Data kemudian diolah pada ESP32 sehingga menghasilkan data yang baik. Selanjutnya dilakukan klasifikasi terhadap data tersebut untuk memperoleh hasil klasifikasi isyarat dari sistem. Data hasil klasifikasi lalu ditransmisikan melalui media bluetooth dari ESP32 menuju aplikasi android.
2.1. Perancangan Purwarupa Sistem
Gambar 2. Perancangan Purwarupa Sistem Pada Gambar 2 sensor diletakkan pada setiap jari untuk ruas ketiganya, peletakan ini disusun berdasarkan kenyamanan pengguna. Apabila sensor disusun lebih jauh yakni pada ruas terakhir maka akan mengganggu pergerakan jari, sedangkan apabila disusun lebih dekat maka tidak banyak detil jari yang didapatkan. Lima buah sensor tersebut digunakan untuk membaca orientasi setiap jari. Terdapat juga satu sensor tambahan terletak pada punggung tangan yang digunakan untuk membaca orientasi dan kecepatan tangan. Perangkat multiplekser I2C disusun berdekatan dengan sensor untuk memudahkan proses pengkabelan. ESP32 devkit v1 disusun setelah multiplekser I2C menyesuaikan ruang kosong yang ada dikarenakan ukurannya yang lebih besar daripada komponen lain. Baterai LiPo disusun bersamaan dengan LiPo charger karena kedekatan fungsionalitas-nya. Dikarenakan juga perangkat ini massanya lebih besar dibandingkan perangkat lain maka perangkat ditempatkan pada bagian tangan yang tidak terpengaruh oleh pergerakan tangan pada bagian bawah sisi kanan untuk tangan kanan.
2.2. Perancangan Perangkat Keras
Gambar 3. Perancangan Perangkat Keras Pada Gambar 3 suplai tengangan sistem bersumber pada baterai LiPo dikarenakan keseluruhan komponen sistem dapat berjalan di level tegangan 3.3V. Diterapkan Lipo Charger pada baterai LiPo sebagai perangkat pengisi daya bagi baterai, kemudian diterapkan juga sebuah saklar pada jalur yang menjembatani antara LiPo charger dan keseluruhan sistem sebagai pengaman ketika terjadi error, saklar ditempatkan pada jalur ground. Setiap sensor terhubung dengan multiplekser I2C untuk setiap antarmuka SDA dan SCL-nya berurutan berdasarkan kedekatannya dengan multiplekser I2C dimulai dari jari kelingking untuk indeks ke-2. Multiplekser I2C terhubung dengan ESP32 pada pin D22 dan pin D21 untuk antarmuka SDA dan SCL-nya.
2.3. Perancangan Perangkat Lunak
Gambar 4. Perancangan Perangkat Lunak Berdasarkan Gambar 4 proses pada sistem berawal dengan inisialisasi dataset yang
digunakan untuk mengenalkan sistem terhadap isyarat apa saja yang telah ada. Tahapan inisialisasi diimplementasikan dengan menyisipkan keseluruhan data dan spesifikasi kelasnya ke dalam kode program secara manual. Kemudian dilakukan juga inisialisasi perangkat sensor dan bluetooth untuk mengenalkan sistem terhadap perangkat terkait. Setelah inisialisasi dilakukan, sistem akan mengambil data secara terus-menerus hingga diketahui bahwa nilai pembacaan giroskop punggung tangan untuk sumbu X mencapai nilai pembacaan dibawah -25000, apabila terjadi kondisi demikian sistem akan mengambil data kembali selama 0,25s. Nilai -25000 didasarkan kepada nilai yang dibutuhkan sensor untuk membaca gerakan yang valid, sedangkan 0,25s didasarkan kepada waktu aman yang dibutuhkan sensor untuk memperoleh dua gerakan. Setelah data berhasil didapatkan, maka sistem akan melakukan klasifikasi terhadap data yang telah diperoleh dan diolah. Setelah proses klasifikasi selesai, hasil klasifikasi dikirim dari ESP32 menuju aplikasi android menggunakan media bluetooth. Sistem akan kembali melakukan pengambilan data setelah pengiriman berhasil dilakukan. 2.3.1. Perancangan Inisialisasi Sensor
Gambar 5. Perancangan Inisialisasi Sensor Berdasarkan Gambar 5 tahapan inisialisasi sensor terhadap keseluruhan sensor mulai dari indeks ke-0 hingga ke-5 pada multiplekser I2C. Tahapan diawali dengan memilih sensor yang
aktif dengan memodifikasi nilai bit aktif multiplekser I2C (0x70). Kemudian dilakukan komunikasi serial terhadap MPU6050 (0x68) untuk mengaktifkan perangkat dengan mengganti sumber clock ke sumber internal modul, kombinasi bit yang dibutuhkan untuk mengubahnya harus setara 000 (binary) yakni 0x00 (hexadecimal). Penerapan penggantian
clock dilakukan dengan menulis spesifikasi bit
pada register power management (0x6B). 2.3.2. Perancangan Pengambilan Data
Gambar 6. Perancangan Pengambilan Data Berdasarkan Gambar 6 tahapan pengambilan data diterapkan untuk setiap sensor mulai indeks ke-0 hingga ke-5 multiplekser I2C. Tahapan diawali dengan melakukan komunikasi serial terhadap MPU6050 (0x68). Kemudian dilanjutkan dengan menetapkan alamat awal sekaligus banyaknya register yang diminta. Spesifikasi untuk alamat yang dicantumkan ialah alamat register akselerometer untuk bit high (0x3B) dan banyaknya register ialah 6. Jika sensor saat ini ialah sensor referensi yang terdapat pada punggung tangan (indeks ke-4),
Fakultas Ilmu Komputer, Universitas Brawijaya maka sensor akan meminta lebih banyak data yakni data giroskop untuk sumbu x (0x43) dengan jumlah register sebanyak 2. Data akselerometer yang telah diperoleh kemudian diterapkan operasi konversi data untuk memperoleh orientasi roll dan pitch, kemudian diterapkan juga operasi filter moving average untuk menghasilkan data yang lebih konsisten.
Gambar 7. Perancangan Konversi Data Berdasarkan Gambar 7 tahapan konversi data dari data koordinat untuk sensor akselerometer menuju data orientasi diterapkan untuk setiap sumbu (x, y, z). Tahapan dilakukan dengan menerapkan persamaan konversi sudut sebagai berikut. 𝑟𝑜𝑙𝑙 = arctan ( 𝑥 √𝑦2+𝑧2) × 360 2𝜋 (1) 𝑝𝑖𝑡𝑐ℎ = arctan ( 𝑦 √𝑥2+𝑧2) × 360 2𝜋 (2)
Persamaan (1) dan (2) menghasilkan orientasi sudut untuk sumbu x (roll) dan sumbu y (pitch), orientasi sumbu z (yaw) tidak dilakukan perhitungan dikarenakan arah gerakan tidak berpengaruh terhadap pengenalan postur isyarat. Hasil tahapan konversi berupa dara orientasi dalam satuan lingkaran (radian). Kemudian diterapkan konversi satuan untuk menghasilkan satuan orientasi dalam bentuk derajat agar dapat dibandingkan dengan alat
ukur baku. Tahapan konversi sudut dilakukan dengan menggunakan metode perkalian silang dengan mengacu bahwa satu putaran memiliki ukuran 360 derajat, dan ukuran 180 derajat memiliki nilai yang setara dengan fi.
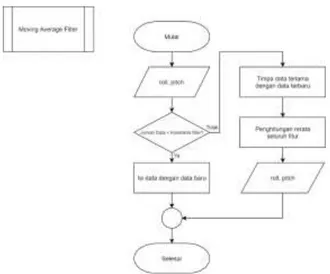
Gambar 8. Perancangan Moving average Filter Berdasarkan Gambar 8 sebelum proses filter data berupa roll dan pitch untuk setiap jari serta punggung tangan. Ketika jumlah data pada tumpukan data filter kurang dari nilai konstanta yang ditentukan, maka proses filter hanya akan melakukan penambahan data kepada tumpukan data filter. Sedangkan ketika jumlah data melebihi tumpukan filter maka proses akan menimpa data dengan waktu simpan terlama. Kemudian proses akan menghitung rerata terhadap seluruh tumpukan data sesuai dengan label datanya. Hasil rerata merupakan keluaran dari proses filter moving average.
Gambar 9. Perbandingan Konstanta Filter Berdasarkan gambar 9 perubahan konstanta -60 -40 -20 0 20 40 60 80 100 su d u t p em b aca an (d era ja t) waktu Pitch n=3 n=5 n=7
filter dalam ukuran yang kecil dapat sangat mempengaruhi hasil. Konstanta 3 untuk filter menghasilkan grafik yang hampir serupa dengan sinyal aslinya, grafik tergolong baik dengan tingkat error yang sedikit. Konstanta 5 untuk filter memperoleh grafik yang baik, namun terdapat pergeseran waktu pada grafik yang dihasilkan. Konstanta 7 untuk filter memperoleh grafik dengan error yang minim, namun grafik yang dihasilkan mengalami pergeseran waktu yang cukup signifikan. Berdasarkan hal tersebut diketahui nilai konstanta pada filter sangat mempengaruhi grafik yang dihasilkan, semakin besar konstanta pada filter maka semakin minim
error yang dihasilkan, namun akibatnya beban
komputasi meningkat sehingga menyebabkan pergeseran grafik. Sehingga pada penelitian ini digunakanlah konstanta 3 dikarenakan dirasa telah cukup untuk meminimalisir error pada grafik dan mampu memperoleh hasil serupa dengan sinyal yang asli.
2.2.3. Perancangan Klasifikasi Naïve Bayes
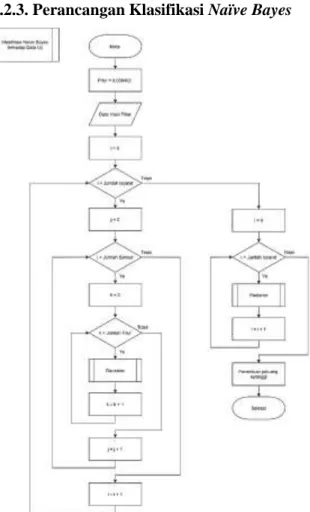
Gambar 10. Perancangan Klasifikasi Naïve Bayes Berdasarkan gambar 10 tahapan klasifikasi diawali dengan menghitung nilai prior untuk mengetahui bobot kelas yang mengacu pada
jumlah data pada sebuah kelas. Kemudian dilakukan proses distribusi gaussian terhadap keseluruhan orientasi pada masing – msasing sensor yang terdapat pada setiap kelas. Setelah dilakukan distribusi gaussian terhadap keseluruhan fitur, dilakukan kalkulasi posterior untuk keseluruhan kelas dengan mengalikan seluruh hasil distribusi gaussian setiap fitur dengan priornya pada kelas terkait. Tahapan terakhir adalah penentuan peluang tertinggi pada keseluruhan posterior isyarat.
Jumlah isyarat yang digunakan pada penelitian ini berjumlah 26 isyarat, yakni isyarat A sampai dengan Z untuk SIBI. Data sebuah isyarat dalam dataset terdiri dari 12 fitur yakni
roll dan pitch untuk jari jempol, jari telunjuk,
punggung tangan, jari tengah, jari manis, dan jari kelingking. Secara umum tahapan klasifikasi
naive bayes adalah menghitung prior, distribusi
gaussian, posterior, serta melakukan pencarian peluang tertinggi. Tahapan menghitung prior dalam penelitian ini dilakukan dengan mendefinisikan nilai prior secara manual yakni sebesar 0,038462 karena jumlah data dalam setiap kelas adalah sama, sehingga nilai prior keseluruhan isyarat adalah sama.
Gambar 11. Perancangan Distribusi Gaussian Berdasarkan Gambar 11 data yang terlibat pada saat melakukan distribusi gaussian yakni fitur dari data uji. Tahapan distribusi ini menghasilkan data probabilitas yang telah dibandingkan terhadap keseluruhan data pada kelas. Persamaan yang digunakan dalam mendistribusikan data latih sebagai berikut.
𝑃(𝑎|𝑏) = 1
√2𝜋𝜎𝑏2
𝑒−
(𝑎−µ𝑏)2
Fakultas Ilmu Komputer, Universitas Brawijaya Pada persamaan (3) terdapat konstanta napier yang setara 2,71828 dan dinotasikan dengan e. Terdapat 4 variabel dalam persamaan yakni, a yang menotasikan suatu fitur, b yang menotasikan suatu kelas, µ yang menotasikan rerata dari fitur terkait yang terdapat pada kelas
b, dan σ yang menotasikan nilai simpangan baku
dari fitur terkait yang terdapat pada kelas b.
Gambar 12. Perancangan Posterior
Berdasarkan Gambar 12 tahapan pertama dalam menghitung posterior ialah melakukan inisialisasi bahwa nilai dari posterior sama dengan nilai prior-nya, dikarenakan nilai
posterior masih kosong. Kemudian dilakukan
proses menghitung posterior untuk seluruh kelas dengan mengalikan setiap hasil distribusi
gaussian-nya dengan posterior-nya. Nilai
modifikasi posterior terakhir merupakan hasil keluaran dari perhitungan posterior.
2.2.4. Perancangan Aplikasi Android
Gambar 13. Perancangan Aplikasi Android Sistem membutuhkan adanya aplikasi untuk dapat merepresentasikan data keluaran sistem kepada pengguna dalam bentuk visual dan audio. Terdapat beberapa komponen yang dibutuhkan untuk menunjang proses
pengembangan aplikasi yang dapat dilihat pada Gambar 13. Pada aplikasi dibutuhkan adanya blok yang dapat menampilkan data terbaru yang bersifat mencolok sehingga dapat dilihat dan dibedakan, maka dirancang sebuah blok yang diletakkan pada bagian pertama aplikasi berdimensi 1:1 dengan lebar hampir memenuhi lebar layar dengan margin minimal seperti terdapat pada poin ke-5. Kemudian dibutuhkan juga blok untuk menampung keseluruhan pesan yang telah diterima sistem agar karakter yang diterima aplikasi dapat dirangkai menjadi sebuah kata, maka dirancang blok dengan ukuran kecil melebar dan ditempatkan setelah blok poin ke-5 dikarenakan kedekatan fungsionalitas seperti terlihat pada poin ke-4. Kemudian dibutuhkan tombol-tombol yang dapat digunakan untuk interaksi sistem dengan pengguna. Adapun tombol yang dibutuhkan antara lain, tombol untuk membersihkan kumpulan karakter yang diterima aplikasi untuk menyesuaikan kebutuhan operasional pengguna, kemudian dibutuhkan juga tombol untuk menerjemahkan kumpulan karakter yang diterima aplikasi ke dalam bentuk suara untuk kebutuhan komukikasi pengguna, yang terakhir dibutuhkan juga tombol untuk menghubungkan perangkat sistem pada sarung tangan dengan aplikasi pada Android. Dikarenakan jumlah yang dibutuhkan hanya berjumlah 3, maka tombol disusun secara horizontal dan ditempatkan pada bagian bawah blok poin ke-4 dikarenakan bagian ini merupakan bagian terbawah aplikasi sehingga penempatannya tidak mengganggu pengguna dalam pengoperasiannya.
3. IMPLEMENTASI
3.1. Implementasi Purwarupa Sistem
Berdasarkan Gambar 14 pada tahap ini setiap komponen diletakkan sesuai dengan apa yang telah dirancang. Komponen disusun di atas sarung tangan yang memiliki sifat elastis untuk kenyamanan penggunaan. Terdapat dua jenis kabel yang diimplementasikan ke dalam sistem, yakni kabel tunggal dan kabel pelangi. Kabel tunggal digunakan pada komponen yang memerlukan banyak pergerakan, sedangkan kabel pelangi digunakan pada komponen yang cenderung diam. Diterapkan juga benang jahit untuk menyatukan komponen sistem dengan sarung tangan.
3.2. Implementasi Perangkat Keras
Gambar 15. Implementasi Pengkabelan Baterai Pada Gambar 15 komponen baterai LiPo diletakkan pada bagian paling bawah dikarenakan dimensi komponen tersebut berukuran lebih luas daripada komponen lain yang ditempatkan secara bersamaan. Diterapkan
double-tip untuk menyatukan komponen kecil
seperti cas LiPo dan saklar dengan baterai LiPo. Terdapat antarmuka USB mikro pada cas LiPo yang dapat digunakan pada proses pengisian daya.
Gambar 16. Implementasi Pengkabelan Sistem
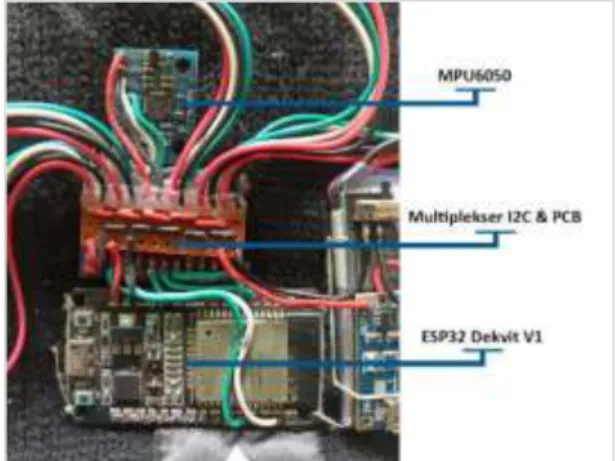
Pada Gambar 16 diterapkan PCB yang digunakan untuk mempermudah proses pengkabelan sensor. PCB diletakkan bersaman dengan Multiplekser I2C dikarenakan perangkat ini memiliki banyak kesamaan dalam hal pengkabelan. PCB direkatkan menggunakan doble-tip.
Gambar 17. Implementasi Pengkabelan Baterai Pada Gambar 17 terdapat 4 warna kabel pada sensor MPU6050 yang berasal dari Multiplexer I2C dan PCB. Deskripsi warna kabel antara lain kabel merah sebagai sumber tegangan sensor, kabel hitam sebagai ground sensor, kabel putih sebagai antarmuka komunikasi clock sensor, dan kabel hijau sebagai antarmuka komunikasi data sensor. Pada ujung kabel diterapkan lem bakar untuk menghindari kerusakan kabel.
3.3. Implementasi Perangkat Lunak
Gambar 18. Implementasi Aplikasi Android Pada Gambar 18 pengembangan aplikasi
android diterapkan melalui MIT App Inventor
dikarenakan keterbatasan waktu penelitian. Terdapat field huruf dengan ukuran besar sebagai penampil data terbaru yang diterima aplikasi android. Ketika data baru diterima, data
Fakultas Ilmu Komputer, Universitas Brawijaya huruf pada field ini akan diganti dengan data terbaru. Pada bagian bawah terdapat field kata dengan ukuran kecil sebagai penyimpan keseluruhan data yang diterima aplikasi android. Ketika terdapat data baru, data tersebut disisipkan pada field ini dengan menggabungkan data string lama dengan data terbaru. Pada bagian paling bawah terdapat tiga buah tombol yang berjajar secara horizontal. Tombol pertama digunakan untuk membersihkan field huruf dengan mengubah data string menjadi ‘.’, serta
field kata dengan mengubah data string menjadi
kosong. Tombol kedua digunakan untuk mengubah data pada field kata menjadi suara. Tombol ketiga digunakan untuk menghubungkan aplikasi android dengan sarung tangan, terjadi perubahan gambar pada tombol ini apabila perangkat telah terhubung.
4. PENGUJIAN
4.1. Pengujian Kesesuaian Data
Pengujian dilakukan karena aplikasi
Android memiliki peranan penting dalam
perepresentasian data. Pengujian dilakukan dengan mengirimkan data isyarat dari ESP32 menuju Smartphone Android. Kemudian dilakukan perbandingan kesesuaian data yang terdapat pada ESP32 dan smartphone. Pengujian hanya dilakukan untuk keluaran teks, dikarenakan tidak memungkinkan untuk mendokumentasikan keluaran suara secara tertulis.
Hasil dari pengujian ini diperoleh dari 26 pengujian, untuk masing-masing isyarat didapatkan 26 data sesuai. Dari hasil tersebut dapat diketahui tingkat kesesuai data pada ESP32 dan aplikasi Android memiliki tingkat akurasi sebesar 100%. Dengan tingkat akurasi tersebut, maka dapat disimpulkan bahwa Aplikasi Android dapat digunakan sebagai media representasi data.
4.2. Pengujian Akurasi Sensor
Pengujian bertujuan untuk mengukur tingkat akurasi sensor dengan membandingkan pembacaan pengukuran dengan alat ukur baku (busur). Dapat memahami tingkat kesesuaian hasil baca keseluruhan sensor yang terdapat pada sistem. Serta dapat memahami tingkat kesesuaian hasil baca tiap sensor terhadap roll dan pitch.
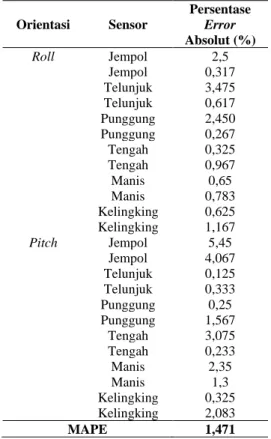
Tabel 1. Hasil Pengujian Akurasi Akselerometer
Orientasi Sensor Persentase Error Absolut (%) Roll Jempol 2,5 Jempol 0,317 Telunjuk 3,475 Telunjuk 0,617 Punggung 2,450 Punggung 0,267 Tengah 0,325 Tengah 0,967 Manis 0,65 Manis 0,783 Kelingking 0,625 Kelingking 1,167 Pitch Jempol 5,45 Jempol 4,067 Telunjuk 0,125 Telunjuk 0,333 Punggung 0,25 Punggung 1,567 Tengah 3,075 Tengah 0,233 Manis 2,35 Manis 1,3 Kelingking 0,325 Kelingking 2,083 MAPE 1,471
Pada Tabel 1 pengujian dilakukan pada dua buah sampel sudut, yakni sudut 400 dan 600.
Masing-masing diterapkan pada roll dan pitch untuk setiap sensor pada sistem. Dari pengujian tersebut dihitung rerata error absolut (MAPE) dan didapatkan hasil sebesar 1,471%. Sehingga diperoleh kesimpulan tingkat kesalahan pengukuran sensor bernilai rendah sehingga tidak terlalu mempengaruhi hasil klasifikasi. 4.3. Pengujian Akurasi Klasifikasi
Pengujian bertujuan untuk mengetahui tingkat akurasi klasifikasi naive bayes dalam mengenali isyarat SIBI. Pada proses pengujian data dibagi kedalam dua bagian dengan perbandingan 2:1. Bagian data dengan rasio 2 diberlakukan sebagai data latih, sedangkan bagian lainnya diberlakukan sebagai data uji. Pada penelitian ini terdapat 234 data, maka pada pengujian ini terdapat 156 data latih, dan 78 data uji. Data uji dan data latih harus memiliki komposisi yang sama meskipun rasionya berbeda.
Tabel 2. Hasil Pengujian Akurasi Klasifikasi
Isyarat Cocok Tidak Cocok
A 3 0
B 3 0
C 2 1
E 3 0 F 3 0 G 3 0 H 3 0 I 3 0 J 3 0 K 3 0 L 3 0 M 1 2 N 3 0 O 2 1 P 3 0 Q 3 0 R 3 0 S 3 0 T 3 0 U 2 1 V 3 0 W 3 0 X 3 0 Y 3 0 Z 2 1 Total 72 6 Persentase (%) 92,31 7,69
Dapat dilihat pada Tabel 2 bahwa beberapa data yang diujikan tidak memiliki kesesuaian dengan data klasifikasi yang dihasilkan. Ketidaksesuaian dapat terjadi karena error pembacaan sensor yang disebabkan pada saat pengambilan data, postur tangan pengguna yang berbeda, serta bentuk ekspresi isyarat yang berbeda. Kemudian dilakukan perhitungan akurasi klasifikasi dan didapatkan hasil akurasi sebesar 92,31% untuk 72 data benar dari 78 kali pengujian. Hasil yang didapatkan tergolong baik dikarenakan masih mendekati 100%.
4.4. Pengujian Waktu Komputasi
Pengujian bertujuan untuk mengukur waktu proses sistem dalam mengklasifikasikan isyarat SIBI. Pengujian diterapkan dengan membandingkan waktu sebelum dan sesudah pengklasifikasian dilakukan. Pengujian dilakukan dengan menggunakan fungsi millis pada arduino yang berfungsi untuk mengambil waktu eksekusi program terkini.
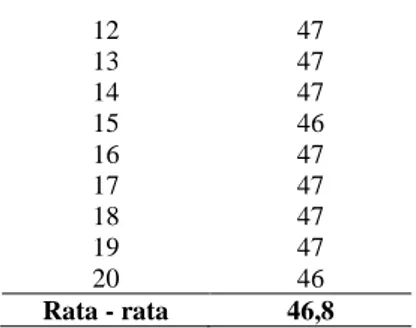
Tabel 3. Hasil Pengujian Waktu Komputasi
Pengujian ke- Waktu (ms)
1 47 2 47 3 47 4 46 5 47 6 47 7 47 8 47 9 47 10 47 11 46 12 47 13 47 14 47 15 46 16 47 17 47 18 47 19 47 20 46 Rata - rata 46,8
Pada Tabel 3 pengujian dilakukan sebanyak 20 kali. Kemudian dilakukan perhitungan rerata waktu komputasi klasifikasi dan didapatkan hasil sebesar 46,8ms. Hasil yang cukup tinggi dikarenakan jumlah data tergolong banyak dan memiliki jumlah fitur yang tidak sedikit untuk setiap datanya.
5. PENUTUP
Dikarenakan tingkat kesesuaian datanya 100%, maka aplikasi android pada penelitian ini dapat dijadikan sebagai media representasi data sistem yang baik. MAPE pengujian sensor sebesar 1,471%, nilai yang cukup baik untuk digunakan pada sistem. Hasil pengujian ini jika dilakukan beberapa kali hasilnya dapat berbeda, karena nilai sensor terus bergerak walaupun sensor ada pada kondisi diam. Pengujian akurasi klasifikasi dilakukan terhadap 98 data dan mendapatkan hasil akurasi sebesar 92,31%, sehingga dapat dikatakan bahwa tingkat akurasi pada penelitian ini memiliki nilai lebih besar dibandingkan penelitian sebelumnya. Dari pengujian waktu komputasi dapat diperoleh rata-rata waktu komputasi sistem sebesar 46,8 ms. Hasil yang diperoleh cukup tinggi dikarenakan jumlah data tergolong banyak dan memiliki jumlah fitur yang tidak sedikit untuk setiap datanya.
Pengembangan dapat dilakukan dengan menerapkan sensor dengan akurasi atau parameter yang lebih baik. Dapat menambahkan variasi data seperti pengenalan gerakan. Dapat juga mengaplikasikan metode klasifikasi lain sebagai pembanding. Serta dapat dikembangkan untuk pengenalan isyarat dua tangan (BISINDO).
6. DAFTAR PUSTAKA
Arduino, 2020. Download the Arduino IDE. [Online]
Available at:
https://www.arduino.cc/en/main/software [Accessed 23 Maret 2020].
Fakultas Ilmu Komputer, Universitas Brawijaya Bahar, Z., 2017. Sistem Pengenalan Bahasa
Isyarat Tangan dengan Sensor Flex, Gyroscope, dan Accelerometer Menggunakan Metode Naive bayes,
Malang: Universitas Brawijaya.
Haque, M. E., Khan, M. N. S. & Sheikh, M. R. I., 2015. Smoothing control of wind farm
output fluctuations by proposed Low Pass Filter, and Moving averages. Rajshahi,
Bangladesh, IEEE.
InvenSense, 2019. MPU-6050. [Online]
Available at: https://43zrtwysvxb2gf29r5o0athu- wpengine.netdna-ssl.com/wp- content/uploads/2015/02/MPU-6000-Datasheet1.pdf [Accessed 17 Desember 2019].
Jazar, R. N., 2010. Theory of Applied Robotics:
Kinematics, Dynamics, and Control (2nd Edition). 2, berilustrasi ed. Berlin:
Springer Science & Business Media. MIT, 2020. With MIT App Inventor, anyone can
build apps with global impact. [Online]
Available at: https://appinventor.mit.edu [Accessed 23 Maret 2020].
Mubarak, V. T. B., 2018. Implementasi
Wearable Device untuk Klasifikasi Postur Keadaan Tubuh Berbasis Data Sensor Mpu6050 Menggunakan Metode Naive bayes, Malang: Fakultas Ilmu Komputer
Universitas Brawijaya.
Robbins, S. P. & Judge, T. A., 2008. Perilaku
Organisasi 2. 12 ed. Jakarta: Salemba.
Smith, S., 2003. Digital Signal Processing: A
Practical Guide for Engineers and Scientists. berilustrasi ed. London: Newnes.
Texas Instrument, 2018. TCA9548A. [Online]
Available at:
http://www.ti.com/lit/ds/symlink/tca9548 a.pdf
[Accessed 03 Maret 2020].
Zerynth, 2019. DOIT Esp32 DevKit v1. [Online]
Available at:
https://docs.zerynth.com/latest/official/bo ard.zerynth.doit_esp32/docs/index.html [Accessed 20 08 2019].