DESAIN KONTROL POSISI PADA PANEL SURYA
DENGAN MENGGUNAKAN METODE
FUZZY
SLIDING MODE CONTROL (FSMC)
Mardlijah1, Wawan Ismanto2, I Gst Ngr Rai Usadha3
1Jurusan Matematika, FMIPA ITS Surabaya 1[email protected]
Abstrak
Salah satu energi alternatif yang banyak kita miliki untuk meng-atasi masalah kelangkaan energi adalah panel surya. Dalam rangka pengoptimalan penggunaan panel surya itu, diperlukan sebuah sis-tem pengendali yang dapat mengontrol posisi panel surya agar selalu mengikuti arah dan posisi dari matahari. Hal ini dilakukan karena energi surya diserap secara maksimal pada saat posisi tegak lurus.
Ada beberapa macam sistem pengendali yang sudah digunakan untuk mengontrol posisi panel surya diantaranya Proporsional Inte-grator dan Differensiator (PID), Sliding Mode Control (SMC) dan
Fuzzy Logic Control (FLC). Dalam makalah ini dibahas penggunaan metode Fuzzy Sliding Mode Control (FSMC) pada pengendalian posisi panel surya agar selalu dalam posisi tegak lurus. FSMC merupakan kombinasi dari SMC dan FLC. Modifikasi dan kombinasi pada SMC dan FLC menghasilkan performansi sistem yang lebih baik. Hal ini terlihat pada hasil simulasi yang sudah dilakukan.
Katakunci:Panel Surya, Sliding Mode Control (SMC), Fuzzy Logic Control (FLC), Fuzzy Sliding Mode Control (FSMC)
1.
Pendahuluan
Indonesia yang memiliki banyak potensi energi terbarukan, seperti tenaga air (termasuk minihidro), panas bumi, biomasa, angin dan surya (matahari) yang bersih dan ramah lingkungan, yang belum dapat dimanfaatkan secara optimal. Belum optimalnya pemanfaatan energi terbarukan disebabkan biaya pembangkitan pembangkit listrik energi terbarukan, seperti tenaga surya, tidak dapat bersaing dengan biaya pembangkitan pembangkit listrik berbahan bakar energi fosil (bahan bakar minyak, gas bumi, dan batubara). Hal ini terjadi, karena intensitas panas yang diterima oleh permukaan bumi adalah relatif kecil, sehingga memerlukan kolektor (pengumpul) yang cukup luas untuk keperluan pembangkitannya.
Pada makalah ini, posisi dari bagian kolektor (pengumpul) sinar mata-hari diatur sedemikian rupa sehingga diharapkan akan selalu tepat dengan arah matahari pada siang hari [3]. Hal ini dikarenakan karena matahari se-bagai sumber energi dari panel surya bersifat tidak tetap pada hanya satu posisi. Oleh karena itu diperlukan sebuah sistem pengendali yang dapat mengontrol posisi panel surya agar selalu mengikuti arah dan posisi dari matahari, sehingga dapat menyerap sel surya secara maksimal.
Dalam rangka memenuhi kebutuhan pengendali yang dapat bekerja dengan baik, maka digunakan pengendaliSliding Mode Control (SMC) pa-da penelitian sebelumnya. Pengenpa-dali SMC memiliki beberapa kelebihan jika dibandingkan dengan pengendali PID, yaitu sifatnya yang sangat ro-bust, mampu bekerja dengan baik pada sistem nonlinear yang memiliki ketidakpastian model ataupun parameter. Namun demikian, pengendali SMC masih memiliki kekurangan, yaitu sedikit lebih rumit dalam peran-cangannya daripada pengendali PID dan masih adanya error meskipun terhitung kecil saat terjadi perubahan parameter berupa penurunan nilai parameter [1].
KonsepFuzzy Logic Control (FLC) terbukti efektif menghadapi sistem nonlinear yang kompleks dengan ketidakpastian yang sulit untuk dimodelk-an [9]. Pengendali FLC merupakdimodelk-an pengendali ydimodelk-ang mudah ddimodelk-an sederhdimodelk-ana untuk dirancang, tetapi juga memiliki beberapa kelemahan, diantaranya adalah keterbatasan analisis maupun sintesis terhadap metode ini. Untuk memperbaiki performansi sistem, SMC murni dimodifikasi dan dikombina-sikan dengan konsep FLC sehingga hasil modifikasi ini disebutFuzzy Sliding
Mode Control (FSMC) [8].
Pada makalah ini, akan dirancang suatu sistem kontrol posisi pada pa-nel surya dengan menggunakan metode FSMC untuk memperoleh sistem pengendali alternatif yang dapat bekerja dengan baik pada sistem nonlinear yang kontinu dengan ketidakpastian yang besar.
2.
Sistem Panel Surya
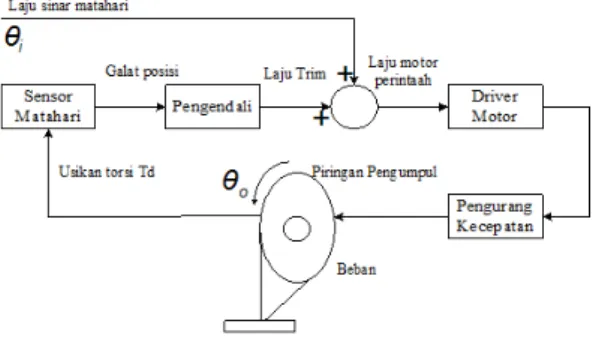
Model sistem kontrol posisi pada sistem panel surya secara sederhana se-perti terlihat pada Gambar 1 [2] di bawah ini. Prinsip kerja dari sistem ini
Gambar 1: Diagram skematik sistem panel surya
adalah bagaimana mengatur posisi dari piringan pengumpul sinar matahari agar selalu mengikuti posisi matahari sehingga permukaan piring pengum-pul matahari selalu dalam kondisi tegak lurus dengan arah sinar matahari karena mempertahankan sinar matahari jatuh ke sebuah permukaan panel secara tegak lurus akan mendapatkan energi maksimum±1000 W/m2 atau 1 kW/m2 [3].
Sistem ini merupakan sistem dengan satu masukan dan satu keluaran dengan objek yang dikendalikan adalah motor servo DC [4].
Masukan sistem adalah laju sinar matahari (θi) yang diterima oleh dua
sensor sel photovoltaic silikon persegi yang diletakkan sedemikian rupa se-hingga pada saat sensor diarahkan ke matahari, sinar cahaya dari celah melingkari kedua sel tersebut [2]. Sedangkan keluaran sistem adalah po-sisi sudut dari motor (θ0) yang digunakan untuk menggerakkan kolektor sehingga berputar mengikuti arah posisi matahari.
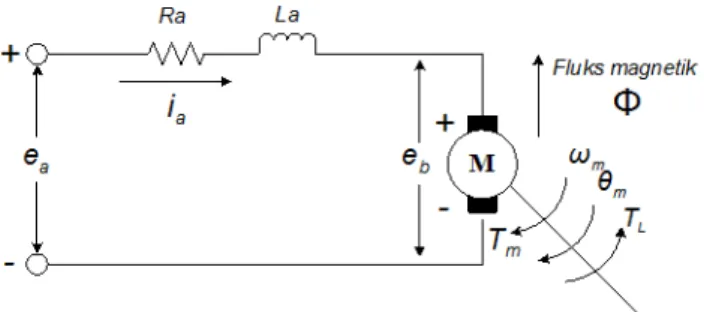
Matahari adalah objek dari panel surya, jadi panel surya harus dapat mengikuti arah gerak dari matahari agar efisiensi dari panel surya menjadi maksimal. Dan untuk dapat memposisikan panel surya agar selalu tegak lurus dengan matahari dibutuhkan panel surya yang dapat dikendalikan. Pemodelan dilakukan dengan menurunkan persamaan matematis dari bagi-an – bagibagi-an penyusun ybagi-ang merupakbagi-ana penggerak dari pbagi-anel surya. Dari
Gambar 3: Model motor servo DC
Gambar 3 diperoleh : ea(t) =Raia(t) +La dia(t) dt +eb(t) dengan eb(t) = Kbωm(t) Tm(t) = Kmia(t) Tm(t) = J dωm(t) dt +Bωm(t)
dengan
ea(t) : Besarnya tegangan yang diberikan pada motor (volt) eb(t) : emf balik (volt)
ia(t) : Arus jangkar (Ampere)
Ra(t) : Tahanan kumparan jangkar (Ohm) La(t) : Induktansi kumparan jangkar (Henry)
Kb : Konstanta emf balik (Volt-sec/rad) Km : Konstanta torsi (N-m/Ampere)
J : Momen inersia rotor (Kg-m2)
B : Koefisien gesekan viskos (N-m/rad/sec) Tm(t) : Torsi motor (N-m)
ωm(t) : Kecepatan sudut motor (rad/sec)
Salah satu bagian dari sistem kontrol posisi adalah penguat servo (amplifier servo). Secara sederhana, keluaran amplifier servo dapat dinyatakan
ea(t) =−K[eo(t) +et(t)] =−Kes(t)
dengan :
ea : Tegangan keluaran servo amplifier (Volt) K : Besarnya nilai penguatan
e0 : Tegangan masukan dari takometer (Volt)
et : Tegangan masukan dari penguat amplifier, op-amp (Volt) es : Jumlahan tegangan masukan pada servo amplifier (Volt)
Untuk mendeteksi kecepatan sudut dari motor digunakan takometer. Ke-luaran takometer dalam bentuk tegangan (et) diumpan balikkan melalui konstanta takometerKt. Secara matematis, hubungan ini dapat ditulis :
et(t) =Ktωm(t)
dengan :
et : Tegangan keluaran takometer (Volt) Kt : Konstanta takometer
ωm : Kecepatan sudut motor (rad/sec)
Roda gigi berfungsi sebagai pengurang kecepatan sudut dari motor. Secara mekanik, sumbu dari motor dihubungkan dengan roda gigi, sehingga posisi sudut roda gigi keluaran dihubungkan ke posisi motor melalui perbandingan roda gigi 1/n, sehingga :
θ0 = 1 nθm dengan :
θ0 : posisi sudut keluaran roda gigi. θm : posisi sudut motor.
3.
Sistem Pengendali Fuzzy Sliding Mode Control
(FSMC)
Untuk memperbaiki performansi sistem pengendali SMC, dilakukan modifi-kasi pada SMC dengan menggunakan FLC. Modifimodifi-kasi ini umumnya disebut sebagai fuzzy sliding mode control (FSMC) atau sliding mode fuzzy logic control (SMFLC) [8][10].
Perancangan pengendali FSMC lebih sederhana daripada merancang pe-ngendali SMC, terutama dalam hal menentukan besarnya control input u. Karena pada FSMC, besarnyau diperoleh dari aturanfuzzy dengan ben-tukRiC : Jikas=LSi dan d=LDi maka u=LUi dimanas adalah jarak antara vektor keadaan dan permukaan sliding, dan d adalah jarak antara vektor keadaan dan vektor normal ke permukaan sliding dimana vektor normal melalui titik asal dari ruang keadaan. LSi ∈ T S dan LDi ∈ T D
masing – masing adalah nilaifuzzy dari variabel keadaanfuzzy s dand pada daerah fuzzy ke-i dari ruang keadaan fuzzy. LUi adalah vektor masukan
fuzzy yang berkorespondensi pada daerah fuzzy ke-i dari ruang keadaan fuzzy. TS, TD dan TU adalah himpunan dari s, d dan u yang mencakup range dari nilai fuzzy s, d dan u. Gambar 4 menunjukkan interpretasi grafissp dan d pada bidang ee˙, dimanasp menunjukkan jarak antara titik
keadaan dan permukaansliding. d menunjukkan jarak antara titik keadaan dan garis normal dari permukaan sliding yang melalui titik asal bidangee˙.
Gambar 4: Interpretasi grafis dari sp dan d [6]
Dengan demikiansp dan d dapat dinyatakan dengan persamaan :
Sp = |e˙+λe| √ 1 +λ2 d= q |e|2−Sp2
dengan aturan fuzzy untuk FSMC dapat dinyatakan oleh Tabel 1
Tabel 1 Aturan umum fuzzy untuk pengendali FSMC [6]
Sp NB NM NS NZ PZ PS PM PB d B PB PB PB PB NB NB NB NB M PB PB PB PM NM NB NB NB S PB PB PM PS NS NM NB NB Z PB PM PS PZ NZ NS NM NB
4.
Perancangan Sistem Pengendali
Model matematika pada sistem posisi panel surya didapatkan dengan meng-gabungkan atau mensubstitusikan rumusan – rumusan yang ada dalam komponen – komponen panel surya, sehingga diperoleh :
¨
Dengan mengasumsikan, ea(t) = u C = Km LaJ D1 = RaB+KbKm LaJ D2 = RaJ+LaB LaJ
Pada perancangan pengendali FSMC diperlukan suatu fungsi switching S sebagai berikut [7]: S= ˙e+λe dengan e=ω−ωd ˙ e= ˙ω−ω˙d
Permukaan slidingnya adalah : ˙
e+λe= 0
Penentuan nilai control input u pada FSMC menggunakan dua variabel masukan pada fuzzy, yaitu sp dan d. Oleh karena itu, ditentukan fungsi
keanggotaan darisp dand dengan aturan fuzzynya. Pada penentuan fungsi
keanggotaan, perlu diketahui batasan nilai sp dan d. Hal ini dapat dilihat
dari lup terbuka system panel surya, dengan nilaiωdan ˙ω sebagai berikut: ω∈[−0.000073,0.000073], ω˙ ∈[−0.0027,0.0027]
Dari data tersebut dicari nilai maksimum dari sp dan d dengan nilai λ=
10. Sp = |ω˙ +λω| √ 1 +λ2 = |0.0027 + 10.(0.000073)| √ 1 + 102 = 0.000341297 d= q |e|2−Sp2 = q ((0.000073)2+ (0.0027)2)−02 = 0.002700986 Dengan memperbesar range nilai sp dan d, diperoleh intervalnya yaitu :
Gambar 5: Fungsi keanggotaanSp pada pengendali FSMC
Gambar 6: Fungsi keanggotaand pada pengendali FSMC
Setelah diketahui masing – masing variabel, selanjutnya dirancang fungsi keanggotaannya darisp dan d seperti ditunjukkan oleh Gambar 5 dan 6.
Nilaicontrol input udiambil dengan rentang yang sama dengan perancang-an FLC, namun dengperancang-an pembagiperancang-an interval tiap fungsi keperancang-anggotaperancang-an yperancang-ang berbeda, yang ditunjukkan oleh Gambar 7. Aturan fuzzy yang digunakan pada pengendali FSMC yang mengacu pada Tabel 1.
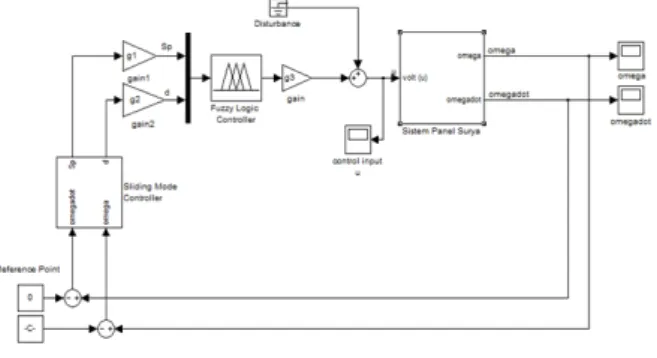
Setelah diperoleh rancangan fungsi keanggotaan dan aturan fuzzy, lang-kah berikutnya adalah mengimplementasikan diagram blok dan rancangan fuzzy pada matlab. Hasil perancangan pengendali FSMC pada simulink dapat dilihat pada Gambar 8, dimana rangkaian system berupa system lup tertutup dengan umpan balik. Supaya dapat dibandingkan dengan ha-sil pengendalian SMC, pada pengendalian FSMC ini digunakan λ = 10. Sedangkan nilai gain1, gain2, gain3 diperoleh dengan cara trial and error seperti yang dilakukan pada perancangan sistem pengendali FLC. Pada
Gambar 7: Fungsi keanggotaancontrol input u pada pengendali FSMC
Gambar 8: Diagram blok sistem panel surya dengan pengendali FSMC
makalah ini diambil nilai – nilai gain untuk sistem pengendali FSMC yaitu g1 = 0.0098, g2 = 0.0025, dan g3 = 1.
5.
Simulasi dan Analisa
Pada bab ini dilakukan tiga macam simulasi, yaitu dengan tanpa gangguan, dan lainnya menggunakan dua gangguan yang berbeda, yaitu gangguan eksternal dan gangguan internal. Gangguan eksternal berasal dari luar sistem, sedangkan gangguan internal berupa gangguan dari dalam sistem. Hal ini dilakukan untuk menguji sifat robust sistem pengendali terhadap ketidakpastian dengan mengamati dan menganalisa performansi
Pada makalah ini akan diberikan nilai dari kecepatan sudut yang diinginkan ω = 0.000073 rad/detik dan percepatan sudut ˙ω = 0. Hal ini
dimaksudkan bahwa nilai – nilai tersebut adalah default dan akan digunak-an pada pengujidigunak-an simulasi, baik dengdigunak-an tdigunak-anpa gdigunak-anggudigunak-an atau pun dengdigunak-an gangguan.
5.1. Simulasi Dengan Tanpa Gangguan
Pada simulasi ini akan diberikan nilai – nilai parameter yang digunakan, yaitu Ra = 0.2, La = 0.3, J = 2, B = 1, Kb = 0.5, dan Km = 2. Dari
kondisi tersebut akan diperoleh hasil seperti pada Gambar 9.
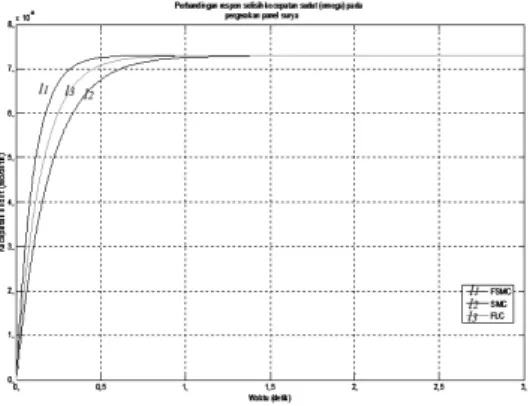
Gambar 9: Perbandingan respon ω (omega) pada pergerakan panel surya dengan tanpa gangguan
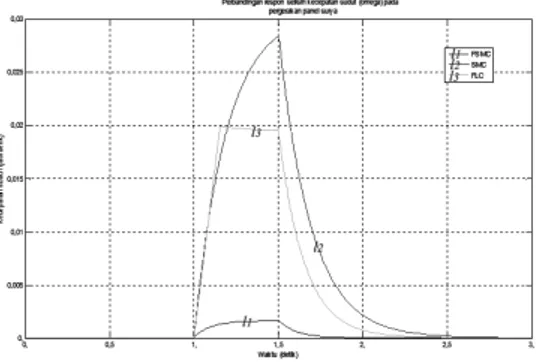
Gambar 10: Perbandingan ˙ω (omegadot) pada pergerakan panel surya dengan tanpa gangguan
Pada kondisi tanpa gangguan tampak bahwa respon sistem pengendali FSMC lebih baik daripada pengendali FLC dan pengendali SMC karena waktu respon yang diberikan FSMC paling cepat dan menuju ke 0.000073. Grafik pada Gambar 9 dan Gambar 10 menggunakan nilai yang sama untuk FSMC dan SMC serta memiliki nilaicontrol input yang sama pula pada FSMC dan FLC.
5.2. Simulasi Dengan Gangguan Eksternal
Simulasi ini dilakukan dengan menambahkan suatu sinyal yang dianggap sebagai gangguan yang berasal dari luar sistem. Sinyal yang akan ditam-bahkan pada simulasi ini diantaranya sinyalimpuls dan square karena ke-dua sinyal tersebut memilki karakteristik yang berbeda yaituimpuls yang bersifat sesaat dansquare yang bersifat kontinu pada selang waktu terten-tu. Pada simulasi ini akan digunakan juga parameter – parameter yang sama dengan kondisi awal (default).
Sinyalimpuls merupakan sinyal yang bernilai sangat besar dan muncul dalam waktu sangat singkat, sinyal ini mewakili gangguan dari luar yang bersifat sesaat. Dalam simulasi ini digunakan sinyal impuls yang benilai 0.9 Volt. Hasil yang diperoleh dari uji dengan sinyal ini adalah pada Gambar 11, pengendali FSMC bekerja lebih baik daripada pengendali SMC dan FLC. Pada gambar tersebut tampak adanya overshoot, namun overshoot yang terjadi masih bisa ditolerir karena nilaiω kurang dari 0.05 rad/detik [5] dan keadaan tersebut tidak sampai merusak komponen – komponen dari sistem. Dengan demikian pengendali FSMC dikatakan cukup baik dalam menghadapi gangguan eksternal yang bersifat sesaat. Sedangkan pada sinyal square diberikan nilai square 0.9 Volt. Sinyal square adalah sinyal yang bernilai tetap untuk selang waktu tertentu. Hasil yang dipe-roleh tampak pada Gambar 12. Gambar 12 memperlihatkan bahwa sistem dengan gangguan square pun, pengendali FSMC bekerja lebih baik dari pada pengendali SMC dan FLC. Pada pengujian sinyal ganggual square ini, tampak juga adanya overshoot yang cukup besar , namun demikian overshoot yang terjadi masih dalam batas nilai toleransi. Dalam pengujian ini, FSMC dikatakan cukup baik dalam menghadapi gangguan eksternal yang bersifat kontinu.
Gambar 11: Perbandingan respon ω (omega)pada pergerakan panel surya dengan sinyalimpuls
Gambar 12: Perbandingan responω (omega) pada pergerakan panel surya dengan sinyalsquare
5.3. Simulasi Dengan Gangguan Internal
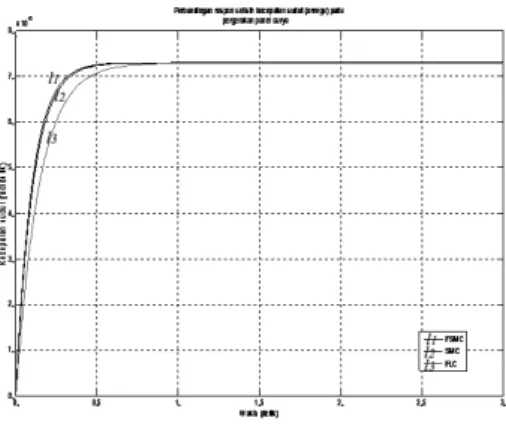
Simulasi ini dilakukan dengan mengubah nilai parameter pada sistem pa-nel surya untuk menguji kepekaan sistem terhadap ketidakpastian dari da-lam sistem. Parameter yang diubah adalah hambatan, induktansi kumpar-an, momen inersia, koefisien gesek viskos, konstanta emf balik, dan kon-stanta torsi. Pengujian sistem pengendali terhadap gangguan internal ini dilakukan dengan memperkecil atau memperbesar nilai parameter. Dari Gambar 13 dan Gambar 14 dapat dilihat bahwa pengendali FSMC beker-ja lebih baik pada gangguan internal daripada pengendali SMC dan FLC
juga memiliki waktu respon yang lebih cepat. Hal ini dikarenakan oleh terbatasnya kemampuan SMC dan FLC dalam mengatasi ketidakpastian parameter. Pada dasarnya ketiga pengendali tersebut memiliki kemampuan yang hampir sama dalam mengatasi adanya overshoot. Itu tampak pada gambar bahwa tidak adanya overshoot pada ketiga pengendali tersebut, namun dalam hal ini FSMC memiliki sifat yang lebihrobust.
Gambar 13: Perbandingan responω (omega) pada pergerakan panel surya dengan parameterminimum
Gambar 14: Perbandingan responω (omega) pada pergerakan panel surya dengan parametermaximum
6.
Kesimpulan
Dari analisis dan pembahasan yang telah dilakukan pada sistem panel surya diperoleh kesimpulan bahwa :
1. Performansi sistem pengendali FSMC pada sistem panel surya me-miliki beberapa kelebihan dibandingkan sistem pengendali SMC dan FLC, yaitu lebih robust terhadap berbagai gangguan baik eksternal maupun internal, lebih mudah dan sederhana dalam perancangannya, serta memiliki waktu respon lebih cepat.
2. Masih terdapat beberapa kekurangan yaitu membutuhkan penalaan gain agar logika fuzzy dapat mencapai performansi yang baik serta dapat bekerja dengan baik serta adanya overshoot pada pengujian gangguan yang bersifateksternal, walaupun overshoot yang ada ma-sih dapat ditolerir.
Pustaka
[1] Junaidi, M.A.,Perancangan dan Simulasi Sistem Kontrol Posisi Pada Panel Surya dengan Menggunakan Metode Fuzzy Sliding Mode Con-trol, Surabaya: Institut Teknologi Sepuluh Nopember, 2009.
[2] Kuo, C. B.,Teknik Kontrol Automatik Jilid 1., Jakarta: Prenhallindo, 1998.
[3] Mintorogo, D.S., Strategi Aplikasi Sel Surya Photovoltaic Cells Pada Perumahan dan Bangunan Komersial, Surabaya: Universitas Kristen Petra, 2000.
[4] Musafa, A.,Perancangan dan Simulasi Sistem Kontrol Posisi Pelacak Matahari Dengan Pengendali PID, Fakultas Teknik Universitas Budi Luhur, 2003.
[5] Ogata, K., Teknik Kontrol Automatik Edisi Kedua Jilid 1, Jakarta: Erlangga, 1996
[6] Palm, R., Driankov, D., dan Hellendoorn, H.,Model Based Fuzzy Con-trol: Fuzzy Gain Schedulers and Sliding Mode Fuzzy Controllers, Ber-lin: Springer-Verlag, 1997.
[7] Perruquetti, W. dan Barbot, J.P., Sliding Mode Control in Enginee-ring,New York: Marcel Dekker, Inc, 2002.
[8] Rizan, R.I., Analisis dan Perancangan Sistem Pengendali Pada In-verted Pendulum Menggunakan Metode Fuzzy Sliding Mode Control, Surabaya. Institut Teknologi Sepuluh Nopember, 2008.
[9] Zhang, H. dan Liu, D., Fuzzy Modeling and Fuzzy Control, Boston: Birkhuser, 2006.
[10] Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C., Fuzzy Sliding Mode Control for Discrete Nonlinear Sistems, Transactions of China Auto-mation Society, Vol. 22, No. 2 (Sum No. 86), 2003.
![Gambar 4: Interpretasi grafis dari s p dan d [6]](https://thumb-ap.123doks.com/thumbv2/123dok/2136003.2704830/7.892.284.591.177.342/gambar-interpretasi-grafis-dari-s-p-dan-d.webp)