BAB I PENDAHULUAN 1.1 Latar Belakang
SCADA (Supervisory Control and Data Acquisition) dan DCS (Distributed
Control System) merupakan teknologi yang sedang berkembang dan banyak
digunakan di industri besar. SCADA atau DCS merupakan sistem yang dapat mempermudah operator dalam mengontrol alat-alat di industri dari jarak yang bahkan sangat jauh (skala pengendalian DCS lebih kecil dibandingkan SCADA). Seorang engineer diharuskan paham mengenai sistem SCADA atau DCS dan HMI (Human Machine Interface) sebagai interface antara operator dengan sistem. Akan tetapi cukup banyak juga engineer yang belum memahami mengenai sistem SCADA dan DCS terutama pada bagian standard-standar HMI, control room, penyimpanan data, dan diagnosa sistem.
Maka dari itu penting dibahas mengenai sistem SCADA dan DCS terutama pada bagaian supervisory control dan control room. Penulis memilih tema
supervisory control dan control room agar makalah ini dapat membantu engineer
yang belum paham betul mengenai supervisory control dan control room menjadi paham dan tidak salah memberikan standard-standard dalam sistem SCADA maupun DCS.
1.2 Tujuan
Tujuan penulisan makalah ini adalah :
1. Membuat makalah supervisory control dan control room.
2. Mengetahui dan memahami sistem supervisory control di SCADA ataupun DCS.
3. Mengetahui dan memahami standard-standard perancangan HMI. 4. Mengetahui operasi standard pada control room.
5. Mengetahui fungsi penyimpanan data pada sistem SCADA ataupun DCS. 6. Mengetahui fungsi diagnose sistem pada sistem SCADA ataupun DCS.
1.3 Batasan Masalah
Batasan masalah dalam makalah ini adalah :
1. Hanya membahas mengenai supervisory control pada MTU (Master
Terminal Unit) pada sistem SCADA ataupun DCS.
2. Hanya membahas mengenai standard-standard HMI dan
software-software HMI.
3. Hanya membahas mengenai design dan operasi standard control room. 4. Hanya membahas fungsi dan proses penyimpanan data pada sistem
SCADA ataupun DCS.
5. Hanya membahas fungsi dan proses diagnose sistem pada sistem SCADA ataupun DCS.
1.4 Metodologi Penyusunan Makalah
Metodologi dalam penyusunan makalah ini adalah :
1.
Studi LiteraturPada tahap ini dilakukan pencarian bahan-bahan referensi mengenai penjelasan supervisory control, komponen utama penyusun SCADA, Standard penggunaan HMI beserta vendornya, desain Control room, bagaimana penyimpanan data pada sistem SCADA ataupun DCS, serta diagnose sistem pada sistem SCADA ataupun DCS.
2. Dokumentasi
Tahap ini adalah penyusunan makalah.
1.5 Sistematika Penulisan
Makalah ini terdiri dari 3 (tiga) bab sebagai berikut :
BAB I : PENDAHULUAN
Bab ini berisi latar belakang yang membahas mengapa makalah mengenai
mengungkapkan maksud penulis, batasan masalah yang membatasi konten yang dibahas pada makalah ini, serta metodologi penulisan yang mengungkapkan metode yang digunakan dalam pembuatan makalah ini.
BAB II : PEMBAHASAN
Bab ini berisi pembahasan mengenai supervisory control dan perannya dalam sistem SCADA, HMI dan standard-satndardnya, control room beserta cara mendesainnya, standard operasi pada control room, management
historical data pada sistem SCADA ataupun DCS, serta Diagnostic System
pada sistem SCADA dan DCS.
BAB III : PENUTUP
Bab ini menyampaikan kesimpulan dari hasil penulisan dan saran untuk pengembangan bahasan lebih lanjut.
BAB II PEMBAHASAN
2.1 Supervisory Control
Penjelasan mengenai supervisory control diambil dari sumber [1]. 2.1.1 Pendahuluan Mengenai SCADA
Dalam pengoperasian tenaga listrik, sistem pada industri yang besar, dan lain-lain, seorang dispatcher membutuhkan alat bantu untuk mempermudah pengaturan dan pemantauan tenaga listrik atau proses yang dilakukan sistem. Untuk kepentingan di atas, dispatcher akan dibantu dengan sistem SCADA (Supervisory Control and Data Acquisition) yang berada di control center.
Master station mempunyai fungsi melaksanakan telemetering, telesignal, dan remote control terhadap remote station. Remote station adalah stasiun yang
dipantau, atau diperintah dan dipantau oleh master station, yang terdiri dari
gateway, IED (Intelegent Electronic Device), lokal HMI, RTU (Remote Terminal Unit), dan meter energy.
SCADA memiliki fungsi telemeteri dan telekontrol RTU. Sistem SCADA terdiri dari 3 bagian utama yaitu master (MTU-Master Terminal Unit), slave (RTU-Remote Terminal Unit), dan media komunikasi. Master memiliki fungsi sebagai pengendali dan penampil data dari slave, sedangkan slave berfungsi menjalankan perintah dari master, dan media komunikasi untuk menghubungkan
master dan slave. Media komunikasi pada sistem SCADA dapat menggunakan
ethernet, wireless, kabel, fiber optic ataupun kabel serial RS-232/RS-485.
SCADA telah banyak diaplikasikan dalam berbagai plant pada bidang industri seperti pada plant pengolahan air limbah. Plant pengolahan air limbah digunakan untuk mengolah air limbah rumah tangga menjadi air bersih. Didalamnya terdapat pengontrolan kadar pH dalam air, pengontrolan ketinggian air, pengontrolan tekanan air. Semua proses pengontrolan aktuator dilakukan berdasarkan umpan balik sensor.
Berbagai penelitian tentang sistem SCADA memiliki alasan masing-masing mengenai sistem SCADA yang dirancang seperti, penggunaan perangkat lunak delphi sebagai pembuatan tampilah HMI karena delphi memiliki fasilitas untuk
komunikasi serial yang nantinya digunakan untuk berkomunikasi dengan PLC menggunakan jaringan ethernet.
Penelitian lain berkaitan dengan pemanfaatan fungsi dasar protokol modbus dan komunikasi serial RS485. Dalam konunikasi tersebut terdapat satu Master dan satu atau beberapa slave yang membentuk sebuah jaringan. Komunikasi Modbus selalu di awali dengan query dari master, dan slave memberikan respon dengan mengirimkan data atau melakukan aksi sesuai perintah dari master. Slave hanya akan melakukan komunikasi jika ada perintah (query) dari master dan tidak bisa melakukan komunikasi dengan
slave yang lain.
SCADA secara umum adalah suatu sistem yang mengumpulkan data dan menganalisisnya secara real time. SCADA tidak sepenuhnya sebagai pengontrol tetapi fokusnya pada tingkat pengawasan dan pemantauan. Sistem SCADA merupakan kombinasi antara telemetering, telesignalling dan telekontrolling. SCADA selama ini diketahui sebagai sebuah sistem kontrol. Sistem SCADA yang pertama kali mengakusisi data menggunakan panel meter, lampu, dan grafik dengan perekam pita. Operator mengoperasikan secara manual beberapa tombol untuk pengawasan, kontrol dan akusisi data pada plant, pabrik dan fasilitas pembangkit listrik.
Gambar 2.1 memberikan ilustrasi tentang koneksi sensor dan panel system [1]
Dalam dunia manufaktur modern dan proses industri, industri pertambangan, utilitas publik dan swasta, efisiensi dan keamanan telemetri industri sering kali memerlukan koneksi dengan beberapa peralatan dan sistem terpisah pada jarak yang jauh. Jarak tersebut berkisar antara beberapa meter hingga ribuan kilometer. Telemetri digunakan untuk mengirim perintah, program dan menerima pantauan informasi dari RTU.
Sebelumnya pada akusisi data, logic relay digunakan untuk mengontrol sebuah plant atau sistem. Dengan munculnya CPU (Central Processing Unit) dan perangkat elektronik lain, produsen mengintegrasikan digital elektronik dengan logic relay. PLC (Programmable Logic Controller) masih menjadi salah satu sistem kontrol yang paling banyak digunakan dalam industri. Untuk kebutuhan pengawasan dan mengontrol lebih banyak perangkat yang terus berkembang, PLC didesain terdistribusi dan sistem menjadi lebih cerdas dan lebih kecil dalam hal ukuran. PLC dan DCS diperlihatkan pada Gambar 2.2.
Gambar 2.2 PC ke PLC atau DCS dengan fieldbus dan sensor [1]
Keuntungan dari sistem SCADA PLC / DCS adalah :
1. Komputer dapat merekam dan menyimpan data yang sangat besar. 2. Data dapat ditampilkan dengan banyak cara sesuai keinginan pengguna. 3. Ribuan sensor di wilayah yang luas dapat dihubungkan ke sistem. 4. Operator dapat menggabungkan simulasi data real ke dalam sistem. 5. Banyak jenis data dapat dikumpulkan dari RTU
6. Data dapat dilihat dari mana saja, bukan hanya di pusat. Kerugiannya adalah:
1. Sistem ini lebih rumit daripada sensor jenis panel.
2. Keterampilan operasi yang berbeda diperlukan, seperti analis sistem dan programmer.
Sebagai persyaratan untuk sistem yang lebih kecil dan lebih cerdas, sensor dirancang dengan kecerdasan PLC dan DCSs, perangkat ini dikenal sebagai IED. IED terhubung pada fieldbus, misalnya Profibus, DeviceNet atau Foundation Fieldbus ke PC. IED cukup cerdas untuk memperoleh data, berkomunikasi dengan perangkat lain. Masing-masing sensor super cerdas dapat memiliki lebih dari satu
sensor on-board. Biasanya, sebuah IED bisa menggabungkan sensor analog input,
output analog, kontrol PID, sistem komunikasi dan memori program dalam satu perangkat.
Gambar 2.3 PC ke IED menggunakan fieldbus [1]
Keuntungan dari PC ke sistem fieldbus IED adalah : 1. Jumlah kabel lebih sedikit
2. Operator dapat melihat sampai ke tingkat sensor
3. Data yang diterima dari perangkat dapat mencakup informasi seperti serial angka, nomor model ketika dipasang, dan oleh siapa.
4. Semua perangkat bersifat plug and play, sehingga mudah dalam instalasi dan penggantian
5. Perangkat yang lebih kecil berarti ruang fisik kecil untuk sistem akuisisi data Kelemahan dari PC ke sistem IED adalah:
1. Sistem yang lebih canggih membutuhkan karyawan lebih terlatih 2. Harga Sensor yang lebih tinggi (diimbangi oleh berkurangnya PLC) 3. IED lebih mengandalkan pada sistem komunikasi
2.1.2 Mekanisme dan struktur Supervisory Control
Supervisory Control atau MTU adalah kendali yang dilakukan di atas kendali lokal atau RTU. SCADA merupakan sebuah sistem yang mengumpulkan informasi atau data-data dari lapangan, kemudian mengirimkannya ke sebuah komputer pusat yang akan mengatur dan mengontrol data-data tersebut. Dalam Aplikasinya, subsistem penyusun SCADA terdiri dari:
1. HMI (Human Machine Interface) 2. MTU (Master Terminal Unit) 3. RTU (Remote Terminal Unit)
4. PLC (Programmable Logic Controller) 5. Sistem Komunikasi (Antar MTU dan RTU)
Arsitektur dasar dari sebuah sistem scada dapat dilihat pada Gambar 2.4.
Berikut ini adalah penjelasan pada masing-masing bagian : 1. Operator
Operator manusia mengawasi sistem SCADA dan melakukan fungsi supervisory control (pengawasan dan pengontrolan) untuk operasi plant jarak jauh.
2. HMI
HMI menampilkan data pada operator dan menyediakan kontrol masukan bagi operator dalam berbagai bentuk, temasuk grafik, skematik, jendela menu pull-down, layar sentuh dan lain sebagainya. HMI dapat berupa layar sentuh, alat ataupun komputer itu sendiri.
3. MTU
MTU merupakan unit master pada arsitektur master. MTU berfungsi menampilkan data pada operator melalui HMI, mengumpulkan data dari tempat yang jauh, dan mengirimkan sinyal kontrol ke plant yang berjauhan. Kecepatan pengiriman data dari MTU dan plant jarak jauh relatif rendah dan metode kotrol umumnya open loop karena kemungkinan terjadinya waktu tunda.
4. RTU
RTU merupakan unit slave pada arsitektur master atau slave. RTU mengirimkan sinyal kontrol pada peraltan yang dikendalikan, mengambil data dari peralatan tersebut, dan mengirimkan data tersebut ke MTU. Kecepatan pengiriman data antar RTU dan alat yang dikontrol relative tinggi dan metode kontrol yang digunakan umumnya closed loop. Sebuah RTU mungkin saja digantikan oleh Programmable Logic Controller (PLC). 5. Sistem Komunikasi
Sistem komunikasi antara MTU-RTU ataupun antara RTU-field devices dapat berupa modbus, High level data link control (HDLC) protocol, Host Link Communications(HLC), TCP/IP Protokol.
6. Field Devices
Field devices merupakan plant dilapangan yang terdiri dari objek yang memiliki berbagai sensor dan aktuator. Nilai sensor dan aktuator inilah yang umumnya diawasi dan dikendalikan supaya plant berjalan sesuai dengan keinginan pengguna.
2.1.3 Hardware SCADA
Sebuah sistem SCADA terdiri dari sejumlah unit terminal jarak jauh (RTU) mengumpulkan data dari lapangan dan mengirim data kembali ke stasiun induk, melalui sistem komunikasi. Di stasiun induk data yang diperoleh akan ditampilkan dan memungkinkan operator untuk melakukan tugas kontrol.
Data yang akurat dan tepat waktu memungkinkan untuk optimalisasi operasi pabrik dan proses. Manfaat lainnya lebih efisien, handal dan yang paling penting, operasi lebih aman. Hal ini menyebabkan biaya yang lebih rendah dibandingkan dibandingkan sebelumnya. Pada sistem SCADA yang lebih kompleks pada dasarnya ada lima tingkat atau hierarki:
• field level instrumentation and control devices • marshalling terminals dan RTU
• Sistem Komunikasi • Stasiun induk (s)
• the commercial data processing department computer system
RTU menyediakan antarmuka ke analog di lapangan dan sensor digital terletak di masing-masing pusat remote. Sistem komunikasi menyediakan jalur untuk komunikasi antara stasiun induk dan daerah terpencil. Sistem komunikasi ini bisa berupa kabel, serat optik, radio, saluran telepon, microwave dan bahkan mungkin satelit. Protokol khusus dan detection error yang digunakan untuk transfer data yang lebih efisien dan optimal. Stasiun induk (atau sub-master) data dari berbagai RTUs dan umumnya menyediakan antarmuka operator untuk menampilkan informasi dan kontrol dari pusat kontrol. Di sistem telemetri besar, sub-master mengumpulkan informasi dari pusat remote dan bertindak mengirim kembali ke kontrol stasiun induk.
2.1.4 Software SCADA
Software SCADA dapat dibagi menjadi dua jenis, proprietary atau open. Perusahaan mengembangkan software proprietary untuk berkomunikasi dengan perangkat keras mereka. Sistem ini dijual sebagai solusi kunci. Masalah utama dengan sistem ini adalah ketergantungan besar pada pemasok sistem. Sistem
perangkat lunak terbuka telah mendapatkan popularitas karena interoperabilitas yang mereka bawa ke sistem. Interoperabilitas adalah kemampuan untuk mencampur berbeda produsen peralatan 'pada sistem yang sama. Citect dan Wonderware hanya dua paket perangkat lunak terbuka yang tersedia dipasar untuk sistem SCADA. Beberapa paket yang sekarang termasuk manajemen aset terintegrasi dalam sistem SCADA. Komponen khas dari sistem SCADA adalah ditunjukkan dalam diagram berikutnya.
Gambar 2.5 Typical SCADA system [1]
Fitur utama dari software SCADA adalah: 1. User interface
2. Graphics 3. Alarm 4. Trend
5. RTU (dan PLC) antarmuka 6. Skalabilitas
7. Akses ke data • Database • Jaringan
• toleransi kesalahan dan redundansi • Client / Server distributed processing
2.1.5 Fungsi dan Operasi Supervisory Control
Secara umum terdapat tiga fungsi supervisory control untuk keseluruhan sistem : 1. Telemeteri (Akuisisi Data)
Telemetering adalah proses pengambilan data yang terukur pada field device dilapangan untuk dapat dimonitor di pusat pengatur (Control Center).
2. Telesinyal (Pensignalan terhadap indikator-indikator)
Telesignaling adalah pengambilan status peralatan field device di lapangan
untuk dapat dimonitor di pusat pengatur, berupa sinyal alarm dan indikasi yang terhubung ke modul digital input pada RTU (Remote Terminal Unit). Sinyal alarm memiliki dua keadaan , yaitu keadaan ON atau OFF. Begitu pula indikasi memiliki dua keadaan, dimana satu keadaan tertutup (close) dan terbuka (open), seperti pada PMT, PMS rel, PMS line, dan PMS tanah.
3. Telekontrol (Pengontrolan)
Telekontrol adalah pengiriman perintah dari pusat pengatur (Control Center) ke RTU (Remote Terminal Unit) untuk mengontrol aktuator yang terdapat di lapangan.
Supervisory control mencakup tiga area utama yaitu:
a. Control level system
b. Management information system (MIS)
c. Operator dan manajer yang mengawasi produksi
Selain fungsi pengendalian lain yang dilakukan, supervisory control level sebagai tahap proses peralihan untuk kontrol informasi ditransfer dari tingkat MIS ke tingkat sistem pengendalian dan sebaliknya. Sebagai contoh, pesanan produksi yang diterima dari sistem MRP (Material Requirment
Planning) dapat diproses lebih lanjut di tingkat control Pengawas untuk
mengalokasikan sumber daya pabrik yang spesifik untuk setiap produk dan membuat jadwal spesifik untuk setiap lini produksi atau mesin di pabrik.. Sistem pengawasan yang juga dapat memonitor dan mencatat informasi produksi secara real time, mentransfer informasi ringkasan kembali ke sistem tingkat yang lebih tinggi pada penyelesaian pesanan atau batch.
Salah satu fungsi yang paling penting dari supervisory control level adalah untuk mengintegrasikan operator dan manajemen produksi dengan sistem kontrol lain dalam proses. Antarmuka berbasis komputer biasanya digunakan untuk memonitor sistem, parameter proses untuk mencari dan perintah isu manajemen selama proses produksi.
Fungsi yang biasanya dilakukan di supervisory level: a. Proses pemantauan dan pengawasan
b. Real-time product tracking c. Real-time schedule feedback d. Laporan operator
e. Perencanaan sumber daya f. Detil penjadwalan dan kontrol g. Set-up rincian
h. Production instructions i. Quality Systems j. Recipe management
Integrasi ke tingkat MIS sering melibatkan layanan yang diberikan oleh lingkungan komputer bahwa sistem berjalan pada kontrol Pengawas. Operasional supervisory control memerlukan pengaturan batas wewenang pada masing-masing bidang agar tercipta kejelasan tanggung jawab. Berikut contoh operasional dan pembagian wewenang pada instalasi gardu atau pembangkit yang menyangkut instalasi baik di control panel, switch yard maupun jaringan :
a. Pembebasan/penormalan penyaluran jaringan transmisi atau jaringan distribusi merupakan wewenang dispatcher dan telah diatur di dalam SOP operasi;
b. Pembebasan/penormalan pembangkit adalah wewenang pembangkit;
c. Pengisolasian/penormalan isolasi di sisi instalasi gardu/pembangkit terhadap instalasi SCADA dan telekomunikasi merupakan wewenang pengawas manuver atau operator gardu/pembangkit;
d. Pengisolasian/penormalan isolasi di sisi instalasi SCADA dan
telekomunikasi terhadap instalasi gardu/pembangkit merupakan wewenang pelaksana pemeliharaan atau perbaikan instalasi SCADA dan telekomunikasi.
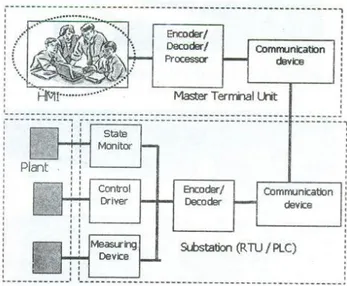
2.1.6 Konfigurasi Supervisory Control dalam sistem DCS dan SCADA
Master station merupakan kumpulan perangkat keras dan lunak yang ada di control center. Biasanya desain untuk sebuah master station tidak sama.
Gambar 2.6 Konfigurasi Supervisory Control dalam DCS [1]
Konfigurasi supervisory control dalam sistem DCS atau SCADA membutuhkan protokol. Pengertian umum dari protokol adalah tatacara/aturan berkomunikasi antar komponen (modul DCS, PLC, PC, field devices, dll) yang terkoneksi dalam sebuah jaringan. Protokol komunikasi data terdiri atas beberapa konfigurasi yaitu :
1. Point-to-point
Konfigurasi point-to-point dapat dilihat pada Gambar 2.7. Konfigurasi ini merupakan tipe paling sederhana yang menghubungkan MTU (Master Terminal Unit) dengan RTU (Remote Terminal Unit) dan biasanya komunikasi ini mengunakan komunikasi serial RS-232.
Gambar 2.7 Konfigurasi komunikasi data point-to-point [1] 2. Multiple point-to-point
Konfigurasi multiple point-to-point dapat dilihat pada Gambar 2.8. MTU dihubungkan ke banyak RTU masing-masing melalui satu kanal MTU (Master Terminal Unit) Sistem Komunikasi RTU (Remote Terminal Unit) komunikasi. Setiap RTU dapat mengirimkan data ke MTU dan sebaliknya secara bersamaan.
Gambar 2.8 Konfigurasi komunikasi data multiple point-to-point [1]
3. Multipoint – star
Konfigurasi multipoint–star dapat dilihat pada Gambar 2.9. MTU dihubungkan ke lebih dari satu RTU dengan satu kanal komunikasi yang sama. Pada setiap saat, hanya satu remote station yang diijinkan mengirimkan data ke master station. Peralatan MTU dapat mengirimkan data ke satu atau lebih RTU yang dipilih atau secara bersamaan. Biasanya untuk komunikasi
multipoint –star komunikasi yang digunakan adalah komunikasi serial RS-485.
Gambar 2.9 Konfigurasi komunikasi data multipoint – star [1]
4. Multipoint partyline
Konfigurasi multipoint partyline dapat dilihat pada Gambar 2.10. MTU dihubungkan ke lebih dari satu RTU oleh kanal komunikasi yang sama. Batasan-batasan yang terjadi pada saat pertukaran data antara MTU dan RTU sama dengan konfigurasi multipoint - star.
Gambar 2.10 Konfigurasi komunikasi data multipoint partyline [1]
Ada dua jenis protocol yang biasa digunakan dalam supervisory control : a. Protokol Modbus
Modbus adalah protokol komunikasi serial yang dipublikasikan oleh Modicon pada tahun 1979 untuk diaplikasikan ke dalam programmable logic controllers (PLCs). Modbus sudah menjadi standar protokol yang umum digunakan untuk menghubungkan peralatan elektronik industri. Beberapa alasan mengapa protokol ini banyak digunakan, antara lain:
• Modbus dipublikasikan secara terbuka dan bebas royalti. • Mudah digunakan dan dipelihara.
• Memindahkan data bit atau word tanpa terlalu banyak membatasi vendor. Modbus mampu menghubungkan 247 peralatan (slave) dalam satu jaringan atau master, misalnya sebuah sistem yang melakukan pengukuran suhu dan kelembapan dan mengirimkan hasilnya ke sebuah komputer. Modbus sering digunakan untuk menghubungkan komputer pemantau dengan remote terminal unit (RTU) pada sistem supervisory control and data
acquisition (SCADA).
Beberapa variasi Modbus, antara lain:
1. Modbus RTU - Merupakan varian Modbus yang ringkas dan digunakan pada komunikasi serial. Format RTU dilengkapi dengan mekanisme cyclic redundancy error (CRC) untuk memastikan keandalan data. Modbus RTU
merupakan implementasi protokol Modbus yang paling umum digunakan. Setiap frame data dipisahkan dengan periode idle (silent).
2. Modbus ASCII - Digunakan pada komunikasi serial dengan memanfaatkan karakter ASCII. Format ASCII menggunakan mekanisme longitudinal redundancy check (LRC). Setiap frame data Modbus ASCII diawali dengan titik dua (":") dan baris baru yang mengikuti (CR/LF).
3. Modbus TCP/IP atau Modbus TCP - Merupakan varian Modbus yang digunakan pada jaringan TCP/IP.
Variasi Modbus dapat diaplikasikan pada port serial dan ethernet dan jaringan lainnya yang support dengan internet protocol suite. Sebagian besar peralatan Modbus menggunakan port serial RS-485. Konsep dasar komunikasi Modbus terdiri master dan slave. Peralatan yang bertindak sebagai slave akan terus idle kecuali mendapat perintah dari master. Setiap peralatan yang dihubungkan (slave) harus memiliki alamat unik. Sebuah perintah Modbus dilengkapi dengan alamat tujuan perintah tersebut. Hanya alamat tujuan yang akan memproses perintah, meskipun peralatan yang lain mungkin menerima perintah tersebut. Setiap perintah modbus memiliki informasi pemeriksaan kesalahan untuk memastikan data diterima tanpa kerusakan. Perintah dasar Modbus RTU dapat memerintahkan peralatan untuk mengubah nilai registernya, mengendalikan dan membaca port I/O, serta memerintahkan peralatan untuk mengirimkan kembali nilai yang ada pada registernya.
b. Protokol Profibus
Profibus adalah sistem komunikasi digital dengan berbagai aplikasi yang luas, khususnya dibidang pabrik dan proses otomatisasi. Profibus cocok untuk kedua keunggulan yaitu, waktu-aplikasi kritis yang cepat dan tugas komunikasi yang kompleks. Komunikasi Profibus berlabuh dalam standar internasional IEC 61.158 dan 61.784. Aspek aplikasi dan engineering ditentukan dalam pedoman umum dari PROFIBUS User Organization (organisasi pengguna profibus). Pengguna ini memenuhi permintaan untuk
produsen independensi dan adanya keterbukaan serta menjamin komunikasi antar perangkat dari berbagai produsen.
Macam-macam Profibus: Process field bus : 1. Profibus FMS : Field Massage Service 2. Profibus DP : Decentralized Peripheral 3. Profibus PA : Process Automation
Gambar 2.11 Topologi Jaringan Profibus [1]
2.1.7 Landlines Untuk Scada
Bahkan dengan mengurangi jumlah kabel saat menggunakan PC untuk system IED, biasanya tetap ada banyak kabel dalam sistem SCADA . Kawat ini membawa masalah tersendiri, dengan masalah utama yaitu noise dan interferensi. Interferensi dan noise merupakan faktor penting ketika merancang dan menginstal sistem komunikasi data, dengan pertimbangan tertentu yang diperlukan untuk menghindari gangguan listrik. Noise dapat didefinisikan sebagai sinyal acak yang korup (atau mengganggu) sinyal asli (atau yang diinginkan). Kebisingan ini bisa masuk ke kabel atau kawat dalam banyak cara. Terserah desainer untuk mengembangkan sebuah sistem yang akan memiliki noise minimal dari awal. Karena sistem SCADA biasanya menggunakan tegangan kecil mereka secara inheren sehingga rentan terhadap noise. Penggunaan twisted pair terlindung kawat CAT5 adalah persyaratan pada kebanyakan sistem menggunakan kawat yang baik ditambah dengan teknik instalasi yang benar memastikan sistem akan terbebas dari noise. Kabel serat optik lebih popular karena lebih kebal dari noise. Saat ini
kebanyakan instalasi menggunakan serat kaca, namun di beberapa daerah industri serat plastik semakin banyak digunakan.
Gambar 2.12 Glass Fiber Optic Cables [1]
2.1.8 SCADA dan LAN
Untuk mengaktifkan semua node pada jaringan SCADA untuk berbagai informasi, mereka harus terhubung oleh beberapa media transmisi. Metode koneksi dikenal sebagai topologi jaringan. Sebuah LAN adalah jalur komunikasi antara komputer, file server, terminal, workstation, dan berbagai peralatan perangkat lain yang cerdas, yang umumnya disebut sebagai perangkat atau host. Sebuah LAN mengijinkan akses untuk perangkat yang digunakan bersama oleh beberapa pengguna, dengan konektivitas yang lengkap antara semua stasiun pada jaringan. Sebuah LAN biasanya dimiliki dan dikelola oleh pemilik swasta dan terletak dalam kelompok lokal.
Ethernet adalah yang paling banyak menggunakan LAN saat ini karena murah dan mudah digunakan. Koneksi jaringan SCADA ke LAN memungkinkan setiap orang dalam perusahaan dengan software yang tepat dan izin, untuk mengakses sistem. Karena data tersebut diadakan didatabase, user dapat dibatasi membaca informasi. Masalah keamanan menjadi perhatian yang penting.
Gambar 2.13 Ethernet yang digunakan untuk transfer data pada system SCADA [1]
Gambar 2.14 PC ke RTU menggunakan modem [1]
Seringkali dalam sistem SCADA RTU (unit terminal jarak jauh (PLC, DCS atau IED)) berada di lokasi yang jauh. Jarak ini bisa bervariasi dari puluhan meter hingga ribuan kilometer. Salah satu cara yang paling hemat biaya untuk berkomunikasi dengan RTU jarak jauh bisa dengan sambungan telepon dial up. Dengan sistem ini perangkat diperlukan adalah sebuah PC, dua modem dial up dan RTU (dengan asumsi bahwa RTU dibangun di COM port). Modem diletakkan dalam modus jawab otomatis dan RTU dapat dial ke PC atau PC dapat memanggil RTU tersebut. Perangkat lunak untuk melakukan ini tersedia dari RTU produsen. Modem dapat dibeli dari rak di toko komputer lokal.
Line modems digunakan untuk menghubungkan RTUs ke jaringan melalui
sepasang kabel. Sistem ini biasanya cukup singkat (sampai 1 kilometer) dan menggunakan FSK (frequency shift keying) untuk berkomunikasi. Modem garis digunakan untuk berkomunikasi dengan RTU ketika RS-232 atau RS-485 sistem komunikasi yang tidak praktis. Bit rate yang digunakan dalam sistem semacam ini adalah biasanya lambat, 1200-9600 bps.
2.1.9 Maintenance dan Sistem Keamanan 2.1.9.1 Maintenance
Komputer dan RTUs biasanya dijalankan tanpa masalah untuk waktu yang lama jika dibiarkan sendiri. Tugas pemeliharaan dapat mencakup pemeriksaan harian, mingguan, bulanan atau tahunan. Pada Saat pemeliharaan diperlukan, teknisi atau insinyur mungkin perlu memeriksa berikut peralatan secara teratur: • RTU dan komponen modul
• Analog modul masukan • modul input Digital
• Antarmuka dari RTU ke PLC (RS-232 / RS-485) • Privately owned cable
• Analog atau link data digital • Situs utama
• Situs pusat
• Ruang operator dan perangkat lunak
Dua aturan utama yang selalu diikuti dalam perbaikan dan pemeliharaan elektronik sistem adalah:
• Jika tidak rusak, jangan memperbaikinya. • Apakah ada salahnya.
Gambar 2.15 Komponen yang membutuhkan maintenance dalam system SCADA [1]
2.1.9.2 Keamanan
Dalam SCADA perlu dilakukan fungsi keamanan secara terintegrasi. Karena SCADA bersifat kompleks maka diperlukan sistem tersendiri untuk membuat sistem SCADA yang ada memiliki keamanan yang memadai. Sistem keamanan ini harus terintegrasi satu sama lain. Tujuan dari sistem keamanan ini sendiri diharuskan dapat melindungi operator yang ada dan melindungi komponen
SCADA yang ada. Tujuan utama dari sistem keamanan adalah Shutdown suatu plant jika terjadi kondisi yang membahayakan. Berikut adalah tujuan dari
shutdown pada suatu plant :
1. Melindungi hidup orang dilingkungan plant. 2. Melindungi peralatan yang ada.
3. Menghindari polusi pada lingkungan. 4. Mengoptimalkan proses plant yang ada.
Dalam sistem keamanan ada 3 komponen yang perlu diperhatikan yaitu Availability, Reliability dan Safety. Safety merupakan aspek untuk sistem pelindung yang mencukupi dari bahaya yang ada. Reliability merupakan aspek untuk mendukung suatu sistem berjalan sesuai dengan jadwal. Availability merupakan aspek kemungkinan suatu sistem dapat berjalan dengan baik (tanpa kegagalan)
Safety merupakan komponen yang harus didesain sehingga dalam suatu plant dapat diimplementasikan mekanisme untuk mencegah terjadinya kecelakaan. Mekanisme ini nantinya harus didesain sedimikian rupa sehingga dapat benar-benar mencegah terjadinya kecelakaan. Mekanisme ini dapat berupa penutupan valve maupun shutdown dari suatu piranti.
Reliability merupakan mekanisme dari suatu plant untuk dapat bekerja memenuhi standard operasi yang ada. Berbeda dengan safery pada reliability dikhususkan untuk mempertahan kinerja dari suatu proses. Reliability sendiri merupakan standard untuk menilai suatu perangkat terhadap kerja yang ada. Aspek ini juga merupakan hal yang penting karena pada umumnya peralatan yang memiliki reliability yang tinggi juga memiliki safety yang tinggi pula .
Availability merupakan aspek perkiraan atau kemungkinan dalam suatu plant untuk terjadi kegagalan sistem. Dalam aspek availability kita dapat menghitung kemungkinan kegagalan sistem yang dapat menyebabkan suatu sistem gagal. Availaility ini biasa direpresentasikan berupa angka kemungkinan.
Dalam suatu plant terdapat mekanisme tertentu tergantung dari seberapa besar parameter tersebut dapat menyebabkan kecelakaan. pada awal dari bidang process melakukan proses apa yang terjadi untuk kemudian dari bidang engineer
menentukan design yang ada. Dalam mendesain fasilitas dari suatu proses maka ditambahkan sistem keamanan. Sistem keamanan ini yang nantinya akan menghasilkan respon emergency untuk suatu plant. Dari sistem ini akan berintegrasi dalam sistem kemanan yang lebih luas yang nantinya dapat menentukan suatu sistem lain harus melakukan respon yang sama atau tidak.
Gambar 2.16 Pembagian zona keamanan [1]
Macam- macam sistem keamanan dalam SCADA : 1. Emergency Shutdown Diagram (ESD)
Untuk menggambarkan sistem shutdown yang ada dalam suatu sistem biasa digambarkan dengan ESD. ESD sendiri dapat merepresentasikan parameter yang memiliki kepentingan yang paling besar hingga paling kecil. Dalam ESD sendiri terdapat level SD dimana level terendah merupakan parameter yang memiliki tingkat kepentingan paling tinggi dan dapat berpengaruh untuk sistem-sistem kecil dibawah sistem SCADA yang ada. Berikut adalah tindakan umum dari ESD 1. Shutdown part dari suatu sistem dan peralatan
2. Mengisolasi penyimpanan hydrocarbon 3. Mengisolasi piranti elektronik
4. Menghentikan aliran hydrocarbon 5. Depressurize sistem
Pada ESD sendiri biasa didesain berdasarkan Causal and Effect Diagram yang ada. Causal and Effect diagram merupakan diagram untuk membaca parameter dan efek yang dihasilkan dari suatu parameter yang teraktifkan. Parameter tersebut lah yang menjadi penentuan suatu kondisi jika terjadi kecelakaan.
2. Fire and Gas Sistem (F&G)
F&G sistem merupakan sistem khusus dimana hanya menggunakan parameter gas dan api. Dalam dunia di industri adanya percikan api sekecil apapun dapat menyebabkan ledakan dan kecelakan kerja yang besar. Oleh sebab itu diperlukan F&G sistem yang baik. Api sendiri terjadi karena ada 3 hal yaitu Panas, Benda yang dapat terbakar dan Oksigen. 3 hal ini biasa disebut segitiga api. 3 hal tersebut yang harus diperhatikan dalam industri sebagai parameter utama adanya api.
Pada F&G sistem biasa terdapat piranti lapangan yang digunakan untuk mendeteksi gas dan mendeteksi api. Piranti ini nantinya akan terhubung dengan alarm dan HMI. Jika komposisi gas terlalu berlebih maka alarm akan berberbunyi dan dapat diakses melalui HMI. Pada F&G sistem syarat suatu piranti harus pada SIL 2 atau 1.
Berikut adalah aksi dari F&G sistem: 1. Peringatan melalui alarm maupun HMI 2. Mengeluarkan mekanisme pemadaman api 3. Mengontrol ventilasi
4. Menghentikan aliran hyrocarbon yang ada 5. Mengisolasi piranti elektronik yang ada 6. Mengaktifkan ESD system
2.2 Struktur dan Mekanisme HMI
Penjelasan mengenai struktur dan mekanisme HMI diambil dari sumber [2].
Human Machone Interface (HMI) merupakan interface antara operator
dengan RTU, sehingga data yang didapatkann dari lapangan dapat dimengerti oleh
operator. Data yang ditampilkan dengan HMI dapat berupa grafik maupaun numerik.
2.2.1 Struktur HMI
Gambar 2.17 Struktur HMI
1 Main menu merupakan tampilan awal untuk memasuki display, memiliki halaman security, sehingga hanya orang-orang yang memiliki password yang dapat memasuki HMI ini.
2 Plant Overview dapat berupa Gambaran grafis dari keseluruhan sistem.
3 Reports Merupakan tempat terkumpulnya data yang didapatkan selama sistem dijalankan.
4 Area graphics menampilkan detail dari keseluruhan proses.
5 Control Display berfungsi untuk pengendalian output di plant dari HMI. Dapat memberikan ruang bagi inputan operator dan memberikan range
minimum-maximum pada field device sesuai yang dikehendaki.
6 Set point display ini berfungsi untuk melihat dan mengatur semua set
point dari sistem kontrol pada area tertentu.
8 Alarm summary display menampilkan daftar alarm yang diterima oleh SCADA, dimana alarm ini dapat diatur prioritasnya sesuai dengan keperluan.
2.2.2 HMI dalam SCADA
Human machine interface (HMI) merupakan bagian penting dari sistem
scada. HMI menjembatani bagi operator untuk memahami proses yang terjadi pada mesin. Tanpa HMI, operator akan kesulitan dalam mengawasi dan mengendalikan mesin tersebut. Gambar 2.18 menunjukkan HMI dalam sebuah sistem SCADA.
Gambar 2.18 HMI dalam sebuah sistem SCADA
Fungsi utama HMI pada sistem SCADA
Secara umum HMI berfungsi untuk memudahkan operator atau manusia dalam melakukan :
Pengawasan plant Pengendalian plant Penanganan alarm
Akses ke historical data dan historical tren
Untuk merancang dan membuat HMI, ada beberapa hal yang harus diperhatikan, yaitu : User familiarity, Consistency, Minimal surprise,
Recoverability, User diversity. Untuk fase pengembangan HMI/SCADA Software,
konseptual, fase logical design, fase physical design, fase pembangunan, fase evaluasi.
2.2.3 Area Control HMI
Dalam system yang cakupannya cukup luas, maka proses control pada HMI perlu di bagi dalam beberapa tahapan. Proses ini dibagi berdasarkan siapa yang akan melakukan aksi control yang di tampilkan oleh HMI. Untuk tampilan operator dan manager perusahaan tentunya memiliki tampilan HMI yang berbeda. Sebagai analogy sederhana, jika operator hanya mampu mengakses aksi control terhadap plant di lapangan, maka seorang manager mampu melakukan bukan hanya terhadap plant, namun memilik data history mengenai apa saja yang telah di lakukan oleh operator maupun engineer terhadap plant tersebut Gambar 2.19 menunjukan bagan struktur dan cakupan wilayah HMI.
Gambar 2.19 Struktur HMI berdasarkan cakupan wilayah akses
Dalam Gambar terhilat bahwa wilayah A adalah wilayah yang biasanya hanya dapat diakses oleh kelas manager atau direktur. Dalam kelas A orang didalamnya dapat melihat data history dari segala sesuatu yang dilakukan oleh engineer maupun operator terhadap plant dibawahnya. Selain itu kelas A juga dapat mengubah aksi control terhadap plant baik mengubah set_point maupun waktu pengontrolan yang akan dilakukan. Sedangkan dalam kelas B adalah wilayah engineer. Dalam kelas B pada umumnya sama dengan kelas operator
C
B
A
yang berada pada kelas C yang membedakan hanyalah seorang engineer mampu mengakses yang dilakukan oleh operator. Sedangkan operator tidak mampu mengawasi apa yang dilakukan oleh engineer. Selain itu, seorang engineer adalah yang bertanggung jawab terhadap system pengontrolan plant. Parameter terhadap plant dapat diubah di dalam kelas B. dalam kelas C hanya berisi saklar-saklar untuk mengoperasikan plant di dalam tampilan HMI nya.
2.2.4 Standar Tampilan HMI
Dalam membuat tampilan HMI, engginer perlu mengetahui standar tampilan yang biasa digunakan agar dapat mudah dipahami oleh user/operator. Berikut standar tampilan HMI yang meliputi tampilan font, warna, dan simbol. 2.2.4.1 Fonts
EDM membaca sebuah file font list untuk memproses Helvetica dan font Courier untuk ukuran font 22. Ukuran-ukuran font dapat ditentukan dengan bebas dari ukuran widget box dengan membuat sebuah seleksi dari daftar
popup dalam kotak dialog widget properties. Sebuah pilihan dapat juga dibuat
berdasarkan standar, ketebalan dan kemiringan. Daftar saat ini (dalam pixel): 8, 10, 12, 14, 16, 18, 20, 24, 28, 32, 36, 42, 48, 60, 72, 96, 120, 168, 216, 312, 408, 504. Ukuran yang besar dimaksudkan untuk “key parameters” yang terketak jauh pada “comfort displays” yang tersebar luas. Contoh yang menunjukkan ukuran tersebut dapat dilihat pada Gambar 2.20.
Dua font yang dapat digunakan:
a. Courier. Font Courier adalah font yang umumnya tersedia digunakan untuk X-severs (Solaris, Linux, Windows + Exceed) dan umumnya digunakan untuk “pembacaan numerik”. Fixed-width mengemulasi sebuah panel meter dan menjaga teks tetap stabil ketika nilai-nilai dirubah.
b. Helvetica. Font Helvetica adalah font yang proporsional digunakan untuk memberikan keterangan dan judul.
2.2.4.2 Warna
Pada tampilan HMI, warna dapat mengidentifikasi proses yang sedang berlangsung pada plant. Dengan tampilan warna dapat membuat operator mudah mengetahui proses yang terjadi pad suatu plant.
Tabel 2.1 Fungsi warna pada tampilan HMI dan contohnya [1]
No Warna Digunakan untuk Contoh
1. Putih a. Hasil aturan alarm EPICS – “INVALID” (untuk monitor dan kontrol sinyal)
b. Judul tampilan awal c. Tampilan yang terkait
dengan pengarahan ke latar depan
a. Hilang komunikasi dari PLC ke IOC memonitor atau mengkontrol
parameter ini,
hancurnya kabel sinyal. b. Tulisan judul layar.
c. Label tombol pada tampilan terkait
2. Abu-abu Gelap
a. Background untuk monitor widgets.
b. Keterangan untuk alat utama (EPICS- visible) c. Garis luar untuk peralatan
utama
a. Background untuk digit yang terdisplay dalam format “panel-meter-style”;
Background untuk bar-chart dan pengukuran melaui panggilan.
b. Label sinyal nama; label untuk status tampilan “LED-lamp- style”
c. Piping, garis luar dari pump, garis luar valve, dan garis luar bemaline.
3. Abu-abu terang
a. Background untuk kontrol widget
b. Keterangan untuk alat dan infrakstuktur
tambahan(non- interfaced)
a. Background untuk on/off ada pushbutton; background untuk slider
b. Label untuk grup dari alat 4 Merah a. Hasil aturan alarm EPICS
= “ALARM” (untuk memonitori nilai)
b. “kondisi On” untuk LED merah
a. Nilai numeric panel-meter-style yang ditunjukkan oleh merah ketika melebihi nilai ambang alarm
b. LED-lamp-style Tabel 2.1 (lanjutan)
4 Merah c. Warna yang mewakili “off” atau “closed” untuk standar aturan warna untuk menampilkan sebiah perangkat aktif.
menunjukkan menjadi merah untuk mengindikasi sebuah kesalahan
a. Widget valve menjadi merah untuk mengindikasi “valve tertutup”; Widget pump menjadi merah untuk mengindikasi “pump off” 5 Kuning a. Hasil aturan alarm
EPICS=“WARN” (hanya memonitor)
b. “Kondisi-On” dari LED kuning
a. Nilai numeric panel-meter-style yang ditampilkan oleh warna kuning ketika nilai melebihi ambang peringatan b. Tampilan LED-lamp-style
menjadi kuning untuk mengidikasi sebuah kondisi “warning”
6 Hijau a. Hasil aturan alarm EPICS=“NORMAL” (hanya memonitor).
b. “Kondisi-On” dari LED hijau.
c. Warna yang
mewakili “on” atau “open” untuk aturan
baku untuk
menganimasikan sebuah perangkat yang aktif.
a. Nilai numeric panel-meter-style yang ditampilkan oleh warna hijau ketika nilai dalam jarak operasi yang normal.
b. Tampilan LED-lamp-style menjadi hijau untuk menunjukkan perangkat “on” c. Widget valve menjadi hijau untuk mengindikasi “valve terbuka”; Widget pump menjadi hijau untuk mengindikasi “pump on” Tabel 2.1 (lanjutan)
No Warna Digunakan untuk Contoh
monitor EPICS b. Pengganti teks judul
ketika tidak ada batas alarm atau kondisi terdefinisikan atau alarm tertampil oleh sebuah sebuah persegi disekitar tampilan teks. b. Penulisan judul tampilan
ketika warna putih tidak cukup kontras.
8. Biru a. Kontrol EPICS. a. Label tombol ; penulisan scala.
9. Cyan a. Pengganti control b. EPICS
a. Label tombol ; penulisan scala.
b. Slider. Anda dapat menggunakan warna monitor biru dan biru muda jika anda
menginginkan untuk
membedakan antara variable control “primary” dan “secondary
10. Coklat a. Memanggil related display (tampilan EDM yang lain)
a. Background untuk tampilan tombol call-up
11. Orange a. “Drag source” untuk memasukkan teks non-PV ke dalam diagnostik
b. Perintah eksternal “shell” (alat EPICS yang lain atau fungsi Unix lainnya-browser, kalkulator etc)
No Warna Digunakan untuk Contoh 12. Ungu a. Keluar atau berhenti
dari Tampilan
2.2.4.3 Palet Simbol
Dalam sebuah sistem terdapat banyak perangkat yang memiliki jenis berbeda. Sehingga dalam HMI perlu adanya perwakilan dari perangkat tersebut berupa simbol-simbol yang mudah dimengerti oleh operator.
Gambar 2.22 Contoh symbol yang sering digunakan
Tetapi setiap vendor memiliki symbol yang sedikit berbeda antar vendor, tetapi masih mudah dikenali oleh operator. Untuk pilihan symbol sendiri biasanya sudah langsung terdapat pada software pemrograman. Programmer hanya perlu melakukan derag and drop saja.
2.2.5 Operasional dan Fungsi HMI
Terdapat banyak jenis dan provider HMI di pasaran. Masing-masing memiliki keunggulan, fungsi, dan teknik pengoperasian sendiri-sendiri. Salah satu vendor penyedia HMI yang tepercaya adalah Yokogawa. Yokogawa sendiri mengeluarkan beberapa produk HMI dalam skala DCS di antaranya Centum CS dan Centum VP. Centum VP ini merupakan produk terbaru Yokogawa. Centum VP diklaim dapat menghadirkan tampilan HMI yang lebih baik serta pengolahan data lebih cepat dan lebih andal. Dengan fitur-fitur terbarunya, Cnetum VP diklaim dapat mencapai ketersediaan sebesar 99,99999%. Pada bagian ini akan
dibahas fungsi dan operasional umum yang terdapat pada Centum VP. Fungsi dan operasi dari Centum VP dapat dilihat pada Gambar 2.23.
Gambar 2.23 Pengoperasian dan Fungsi Monitoring
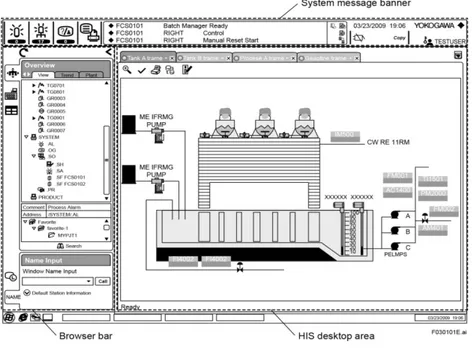
2.2.6 Pengoperasian dan Fungsi Monitoring Umum 2.2.6.1 Tampilan Tata Letak (Layout)
Centum VP memiliki tampilan HIS (Human Interface Station) utama. Tampilan tersebut terdiri dari kotak pesan, browser, dan desktop. Tampilan centum VP ditunjukan pada Gambar 2.24.
Gambar 2.24 Tampilan Tata Letak Centum VP
2.2.6.2 Kotak Pesan (Message Banner)
Sistem Kotak Pesan mengungkapkan status terjadinya alarm secara visual. Status terjadinya alarm ditunjukkan oleh warna dan berkedipnya tombol, dan munculnya tampilan pesan. Sistem Kotak Pesan selalu ditampilkan di bagian atas layar, sehingga tidak akan pernah tersembunyi di balik window lain. Penjabaran dari Sistem Kotak Pesan pada Centum VP ditunjukan pada Gambar 2.25.
Gambar 2.25 Sistem Kotak Pesan Centum VP [1]
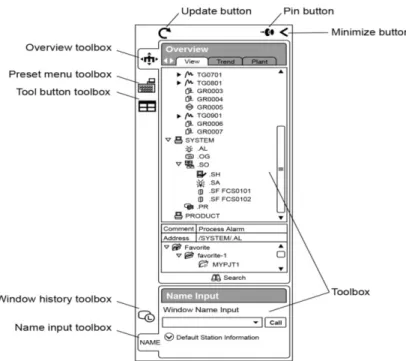
2.2.6.3 Kotak Pencarian (Browser Bar)
Kotak Pencarian digunakan untuk memanggil operasi dan Monitoring Window. Bagian ini dapat menampilkan daftar operasi dan window pemantauan dan struktur hirarkis plant dengan struktur seperti pohon, yang memungkinkan seluruh sistem agar mudah diamati. Apabila kotak pencarian ini tidak digunakan, kotak ini dapat di-minimize dari tampilan utama. Penjabaran dari kotak centum VP ditunjukan pada Gambar 2.26.
Gambar 2.26 Kotak Pencarian Centum VP
2.2.6.4 Desktop Area
Area Desktop HIS menampilkan berbagai operasi dan Monitoring
Windows. Bagian ini terdiri dari tampilan utama, Frame dan kontainer seperti
ditunjukan pada Gambar 2.27
Gambar 2.27 Desktop Area
2.2.6.5 View
Sebagian besar operasi Centum dan Monitoring Window seperti grafik,
2.2.6.6 Frame
Frame menawarkan kerangka kerja untuk mengatur beberapa View untuk
fungsi atau tujuan tertentu. Satu Frame dapat mengalokasikan hingga empat View.
Tab melekat pada Frame; Tab ini ditampilkan berdampingan jika beberapa Frame
dipanggil. Frame dapat menjadi aktif hanya dengan mengklik Tab.
Gambar 2.28 Frame
2.2.6.7 Container Window
Container Window adalah area terluar tampilan HIS yang menjadi
"kanvas" dari Frame yang ditampilkan. 2.2.7 Operasinal dan Monitoring Window
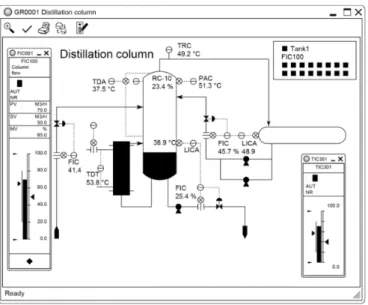
2.2.7.1 Tampilan Grafis dengan Atribut Grafis
Tampilan grafis dengan atribut grafis menampilkan plant dengan cara visual yang mudah dipahami menggunakan objek visual yang beraneka ragam. Kondisi palnt secara grafis ditampilkan dan dapat dioperasikan secara intuitif dan dipantau. Selain itu, berbagai window dapat dipanggil dari tampilan grafis.
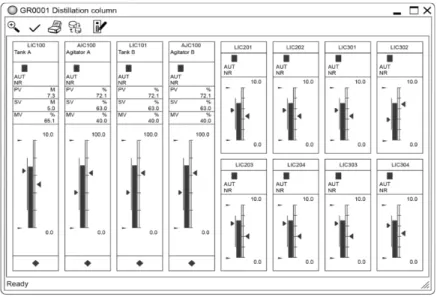
2.2.7.2 Tampilan Grafis dengan Atribut Kontrol
Tampilan grafis atribut dengan kontrol menampilkan blok fungsi status menggunakan instrumen Faceplates. Instrumen Faceplates memiliki dua ukuran yang berbeda. Delapan instrumen Faceplates ukuran besar dapat ditampilkan berdampingan. Enam belas instrumen Faceplates kecil ukuran dapat ditampilkan berdampingan. Instrumen Faceplates dengan dua ukuran berbeda dapat ditampilkan juga secara bersamaan.
Gambar 2.30 Tampilan Grafis dengan Atribut Kontrol
2.2.7.3 Tampilan Faceplate (Instrumen Faceplates)
Tampilan Faceplate digunakan untuk menampilkan grafis nilai-nilai data secara kompak, fungsi blok, status input kontak, dan sejenisnya. Beberapa tampilan Faceplate perwakilan ditunjukkan di bawah ini.
Gambar 2.32 Tampilan Instrumen Faceplate 2
Gambar 2.33 Tampilan Instrumen Faceplate 3
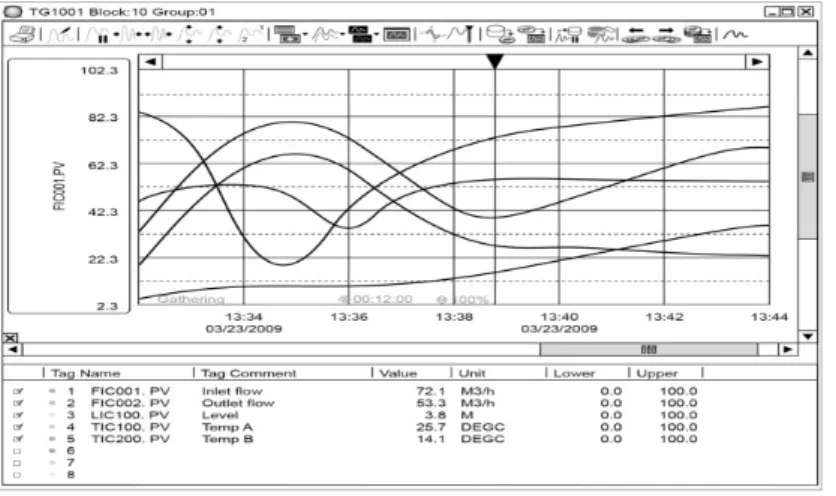
2.2.7.4 Tampilan Trend
Tampilan grafis Trend menampilkan berbagai perubahan data proses seiring dengan perubahan waktu. Perubahan secara time-series dalam mengolah data disebut Data Trend. Tampilan Trend memungkinkan untuk memilih dan menampilkan hingga delapan buah data dari beberapa mode tampilan Trend. Selain itu, Data Trend dari periode sampling yang berbeda-beda dapat ditampilkan pada satu tampilan Trend. Data Trend dapat dengan mudah digunakan dalam aplikasi lain.
Gambar 2.35 Tampilan Trend
2.2.7.5 Mode Tampilan Trend
Selain tampilan grafik Data Trend normal, tampilan grafik Data Trend dapat diatur sesuai kebutuhan. Modus tampilan normal adalah menampilkan data delapan buah dalam satu grafik. Pada mode lain, data dapat ditampilkan masing-masing dalam sebuah blok. Berikut ini menunjukkan tiga jenis mode menampilkan grafik Data Trend.
Gambar 2.37 Tampilan Trend Dipisahkan Digital dan Analog
Gambar 2.38 Tampilan Trend Dengan Referensi
2.2.7.6 Tampilan Tuning
Sebuah tala letak tampilan yang menampilkan parameter penyetelan dan
tuning Data Trend setiap instrumen. Tampilan perbesaran waktu sampling Data Trend dan sumbu axis (waktu) data dapat diubah.
Gambar 2.39 Tampilan Tuning
2.2.7.7 Consolidated Alarm Management
The CAM for HIS (Consolidated Alarm Management Software for HIS) atau Perangkat Lunak Manajemen Alarm Terkonsolidasi untuk HIS digunakan untuk menampilkan pesan alarm yang digabung dari berbagai sistem. Pengaturan kondisi atau filter memungkinkan untuk memilih dan menampilkan alarm yang diperlukan saja. Selain itu, informasi tambahan dapat ditampilkan untuk membantu dalam mengambil tindakan untuk alarm agar lebih cepat dan akurat.
2.2.8 Konfigurasi Human Machine Interface dalam Distributed Control
System dan SCADA
Gambar 2.41 Analogi SCADA dari HMI hingga RTU
Konfigurasi pada HMI bertujuan agar komunikasi antara HMI dengan instrumen yang dikontrol dan dimonitor dapat saling mengirim informasi. Beberapa media komunikasi yang dapat digunakan antara HMI dengan instrumen adalah: 1. Fiber optic 2. Kabel Ethernet 3. Kabel koaksial 4. Modul Radio 5. Satelit
Sedangkan protokol yang dapat digunakan antara lain : 1. Profibus
2. Modbus 3. DNP 3.0
Protokol menentukan cara unit fungsional berkomunikasi, sedangkan media komunikasi merupakan media pengiriman dan penerimaan data/informasi dari MTU ke RTU.
HMI pada komputer sebenarnya ada banyak jenisnya dan kita dapat membuat HMI secara konvensional dengan aplikasi programming seperti Visual Basic, Visual C++, Visual C#, Delphi, Java, dan lain lain. Namun pada industri banyak engineer dan perusahaan lebih memilih menggunakan sebuah tools instan untuk membuat software HMI seperti Wonderware disebabkan perusahaan ingin mempersingkat waktu sehingga memangkas cost dalam pembuatan HMI, sedangkan HMI engineer lebih dimudahkan dalam pembuatannya. karena tools – tools grafik dan animasi sudah banyak tersedia di dalam HMI maker seperti Wonderware (Walaupun dari sisi harga, Wonderware jauh lebih mahal dibanding aplikasi pemrograman konvensional, bahkan ada yang gratis/open source).
Gambar 2.42 Komunikasi antara RTU ke HMI
Berikut beberapa vendor pembuat sistem HMI selain Centum VP yaitu sebagai berikut :
Gambar 2.43 Tampilan HMI Wonderware
Wonderware adalah cabang perusahaan Schneider Electric yang memasarkan software HMI dan banyak digunakan pada industri – industri seperti automotif, oil and gas, mining and metals, chemical, energy, dsb. Untuk membuat HMI dengan Wonderware intouch, pertama-tama kita harus membuka application manager-nya yakni “Intouch”, kemudian pilih “Create new application” (Gambar 2.44), berinama aplikasi yang akan dibuat kemudian pilih lokasi aplikasi.
Selanjutnya akan muncul aplikasi baru pada jendela Intouch Application Manager (Gambar 2.45).
Gambar 2.45 Intouch Application Manager (new application)
Buka aplikasi baru yang telah dibuat kemudian akan muncul Intouch WindowMaker, pilih logo kertas putih untuk membuat “new window”, atur size window yang diinginkan, kemudian buat tampilan HMI sesuai yang diinginkan dengan menggunakan tools yang telah disediakan, pada pojok kanan jendela “Intouch-WindowMaker” (Gambar 2.46)
Untuk mensetting keluaran data klik double pada angka atau komponen yang diinginkan, kemudian akan muncul jendela baru, lakukan setting sesuai keinginan (Gambar 2.47), klik “ok”.
Gambar 2.47 Pemberian ekspresi pada komponen
Kemudian beri nama pada ekspresi yang telah dipilih dan klik “”type pada jendela “Tagname Dictionary” (Gambar 2.48), tentukan variable yang ingin ditampilakn pada “Tag Types” (Gambar 2.49).
Gambar 2.49 Pemberian Tag Types
Selanjutnya akan muncul pilihan tampilan seperti Gambar 2.50, klik pada tombol “Access Name”. kemudian akan muncul dialog Access Name (Gambar 2.51), kita dapat menggunakan Access Name yang sudah ada, merubah, ataupun membuat baru. Pilih “Add” untuk membuat baru maka akan muncul dialog Add Access Name seperti pada gambar dibawah kanan. isikan Access dengan nama terserah anda. pada bagian Application Name isikan dengan MODBUS jika akan menggunakan Modbus IO Server sebagai IO Communicator. jika menggunakan OPC lain misal Kepware maka application name nya menyesuaikan. dan pada bagian Topic Name isikan dengan nama tertentu biasanya nama Topic name untuk mengenali penomoran RTU dalam SCADA misal diberi nama 01 atau RTU-02 dan semacamnya.
Jika sudah selesai, klik “ok”, pilih Access Name yang akan digunakan dan close jendela “Access Name”
Gambar 2.50 Klik Access Name
Gambar 2.51 Pengaturan Access Name
Isikan bagian “Item” dengan adress Modbus yang ingin kita tampilkan (Pada Gambar 2.52 adalah menampilkan register 1 dari Holding register). Kemudian lakukan langkah yang sama untuk masing-masing value. Setelah semuanya selesai, lakukan setting IO Communication di IO Server/ Modicon Modbus (Gambar 2.53).
Gambar 2.52 Pengaturan Access Name
Gambar 2.53 Buka Aplikasi Modicon Modbus
Selanjutnya akan muncul aplikasi modicon bus, klik Configure -> Topic Definition, akan muncul jendela Topic Definition, pilih New maka akan muncul lagi window MODBUS Topic Definition. Isikan Topic Name dengan Topic Name yang telah kita buat di Intouch WindowMaker. Isi Slave ID atau RTU address. kemudian menuju kolom Update Interval, isikan dengan nilai waktu yang anda inginkan untuk refresh data/ mengupdate data dalam satuan milisekon. kemudia pilih OK (Gambar 2.54).
Gambar 2.54 Pengaturan Aplikasi Modicon Modbus
Setelah selesai, jangan tutup software IOServer tersebut. biarkan terbuka, kembali lagi ke InTouch jalankan aplikasi yang telah kita buat dengan cara mengKlik tombol Runtime yang berada pada pojok kanan atas window. setelah di Runtime maka akan muncul window seperti Gambar 2.55. Pada Gambar 2.55 HMI sudah terkoneksi dengan Slave (RTU) melalui Serial Port.
b. Emerson DeltaV
Gambar 2.56 HMI Emerson DeltaV
c. Intellution FixMMI
Gambar 2.57 HMI Intellution FixMMI
d. IntelliMAX
IntelliMAX adalah produk HMI keluaran Sensys (USA) yang menawarkan produk unggulan web based HMI. Intellimax merupakan Client-Server HMI, Server merupakan tempat dimana intellimax di install dan client dapat mengakses HMI tersebut tanpa perlu menginstallnya lagi.
Intellimax menggunakan Java sebagai engine-nya untuk menjalankan fungsi-fungsi HMI di Client. kemudian Intellimax menggunakan MySQL untuk penyimpanan data dan historical datanya dan menggunakan Apache Tomcat sebagai web servernya. Flow data yang dapat dilakukan intellimax dapat dilihat pada Gambar 2.55.
Gambar 2.58 Tampilan IntelliMAX Server
Gambar 2.59 Flow Data IntelliMAX
Tampilan IntelliMAX dapat dibilang standard (tidak terlalu bagus) dan library simbol yang terbatas kita hanya dapat menambahkan library berupa Image/gambar ke dalam intellimax. Fitur-fitur standard HMI pada umumnya juga
terdapat pada intellimax seperti Historian, Trend, Alarm & Event, Security, dan lain sebagainya. HMI ini berbasis VBScript.
Gambar 2.60 Aplikasi IntelliMAX di PT. Semen Padang
Gambar 2.62 Modul Drive-In (antrian tangki) dan Gate-In (penyaluran stock BBM), saat truk tangki masuk areal antrian
e. YOKOGAWA CENTUMV
Gambar 2.64 HMI YOKOGAWA CENTUMV 2.3 Ruang Kontrol
Penjelasan mengenai ruang kontrol diambil dari sumber [3].
Lingkungan kerja saat ini telah mengalami revolusi dari PC menjadi
workstation PC. Perubahan paling mencolok terjadi di pusat-pusat kontrol industri
dan ruang kontrol. Ruang kontrol, secara umum digunakan untuk mendapat informasi tentang instrumentasi. Saat ini ruang kontrol telah berevolusi dari panel besar dengan instrumentasi di ruangan yang berdekatan (dengan plant) menjadi sebuah ruang kontrol modern yang menggunakan komputer sebagai interfacenya. Perubahan ini telah berdampak pada cara perancangan ruang kontrol dan telah memunculkan disiplin baru yang disebut Human Factor Engineering (HFE).
Di masa lalu, satu-satunya faktor manusia yang mempengaruhi desain ruang kontrol adalah pengelompokan instrumen untuk mendukung pengenalan pola. Skema ini memudahkan para operator dan insinyur untuk melihat “Gambaran besar” dari proses yang sedang dikontrol. Kadang-kadang desainer sedikit mengambil pedoman Human Factor sederhana yaitu menentukan tinggi minimal dan tinggi maksimum dalam pemasangan instrumen pada jarak 40-70 inci dari lantai, sehingga operator bisa membaca semua instrumen tanpa harus membungkuk atau mendongak.
Sayangnya untuk prosesor dan sebagian besar panel kontrol tidak dirancang oleh para insinyur Human Factor, tetapi oleh para insinyur
instrumentasi. Insinyur instrumentasi jarang memperhatikan dengan poin-poin
ergonomi.
Gambar 2.66 Ruang Kontrol Industri Terkomputerisasi
Insinyur instrumentasi yang merancang panel instrumen harus mengakomodasi beberapa fitur. Panel instrumen harus dapat dipahami oleh
operator dengan mudah serta kemudahan dalam mengetahui
perubahan-perubahan yang terjadi pada plant. Demikian pula kemampuan untuk mengidentifikasi Data Trend yang menggunakan goresan pena di atas kertas
2.3.1 Desain Ruang Kontrol 2.3.1.1 Top-Down Approach
Pendekatan top-down menyediakan kerangka kerja untuk memastikan bahwa keputusan mengenai hal-hal seperti pemilihan peralatan, operasional, lingkungan kerja, dan pilihan furnitur didasarkan pada tuntutan operasional. Tidak peduli seberapa baik sebuah ruang kontrol dirancang, sistem secara keseluruhan akan gagal jika operator kelebihan beban, melakukan tugas-tugas yang tidak mereka pahami, atau berusaha untuk membaca display yang tidak terbaca. Dengan pendekatan top-down, keterbatasan operator secara otomatis disertakan dan potensi ketidaksesuaian antara kemampuan operator dan tuntutan sistem diminimalkan.
Gambar 2.67 Ruang Kontrol Modern
Standar internasional yang dikenal sebagai ISO 11064 adalah tulang punggung desain ergonomis ruang kontrol. Inti dari pendekatan ini dapat didefinisikan dalam istilah tunggal: Desain yang Berpusat pada Operator.
Pendekatan top-down menguraikan tujuan dari pusat kendali dalam berbagai situasi, di antaranya: off-normal, kondisi darurat, pemadaman, dan
startup normal. Ditentukan terlebih dahulu sistem apa yang diperlukan untuk
mengakomodasi kondisi tersebut, kemudian dicatat proses yang lebih baik dilakukan oleh mesin (misalnya perhitungan berulang-ulang), diikuti oleh fungsi-fungsi yang lebih baik dilakukan oleh manusia (misalnya menghadapi situasi tak terduga). Hasilnya akan menentukan spesifikasi sistem komputer serta tugas-tugas yang harus dilakukan oleh operator.
Selain memaksa sebuah evolusi dalam desain konsol, perubahan revolusioner dalam teknologi juga meningkatkan estetika. Munculnya teknologi digital, integrasi sistem, dan display LCD / LED telah memungkinkan produsen konsol untuk merancang lebih banyak jenis konsol dengan jarak yang lebih kecil. Secara bersamaan, produsen konsol juga menemukan lebih banyak kegunaan ruang kontrol.
2.3.1.2 Ergonomi
Ergonomi adalah studi tentang faktor manusia hubungan antara pekerja dan lingkungan mereka. Kebanyakan standar konsol terdahulu diatur pada tahun 1960, dan telah direvisi untuk mengakomodasi baik teknologi baru dan pemahaman baru tentang bagaimana kepala kita, leher, dan mata beroperasi.
Studi ergonomis masa lalu dilakukan dengan orang dalam posisi duduk tegap dengan pinggul, bahu, dan telinga dalam lurus dalam garis vertikal. Pada kenyataannya, tidak ada yang akan duduk dalam posisi yang tidak nyaman seperti itu, terutama selama delapan jam. Karena kita sekarang memahami lebih lanjut tentang bagaimana leher, kepala, dan mata beroperasi, standar ergonomis saat ini didasarkan pada penilaian yang lebih realistis tentang bagaimana operator benar-benar bekerja di konsol. Penelitian ergonomis terbaru menyatakan orang yang duduk dalam posisi santai di mana kepala kita miring ke depan kira-kira 8 sampai 15 derajat pada sudut pandang dari minus 30 sampai 35 derajat, dan rata-rata kita lebih suka melihat pada jarak 30”sampai 35” dari layar, berdasarkan ukuran layar. Jarak melihat minimum rata-rata sangat ditentukan oleh tiga faktor yaitu :
1. Akomodasi Penglihatan adalah jarak di mana mata kita fokus ketika tidak ada objek yang fokus. Otot-otot lensa fokus mata harus bekerja 2 1/2 kali lebih keras untuk fokus pada jarak 12” dari pada 30”, yang mengakibatkan ketegangan mata.
2. Konvergensi adalah ketika mata fokus pada benda yang dekat. Hal ini memberikan ketegangan yang lebih pada mata ketimbang akomodasi.
3. Kedalaman fokus adalah rentang jarak yang tidak memerlukan mata untuk memfokuskan kembali. Hal ini paling sering mempengaruhi operator di atas usia 40, di mana mereka membutuhkan kacamata baca.
Solusi untuk masalah yang timbul dari ketiga faktor adalah turunkan ketinggian monitor, membuat objek dan layar untuk dilihat pada jarak yang sama, posisi display pada sudut yang tepat dengan sudut pandang, meningkatkan kecerahan pada hasil cetakan (print), memperbesar ukuran teks, dan pergantian tugas secara berkala. Akomodasi dan konvergensi diperkecil saat pandangan diturunkan. Titik istirahat rata-rata konvergensi adalah 35”pada 30 derajat sudut bawah, 45” di horizontal, dan 53”pada 30 derajat sudut atas. Data ini memberikan pengaturan yang signifikan untuk menurunkan ketinggian monitor. Manfaat lain dari ketinggian monitor yang lebih rendah adalah pengurangan sindrom mata kering disebabkan oleh kelopak mata membuka lebar saat melihat ke atas.
Gerakan mata dan kepala baik vertikal dan horizontal ditunjukkan pada diagram Gambar 2.44 dan Gambar 2.45 di mana menunjukkan sudut penglihatan yang terbaik untuk operator. Idealnya, tidak ada gerakan kepala dan minimal gerakan mata untuk tugas yang paling penting dan paling umum. Dalam desain konsol ini perlu ditentukan apakah workstation akan digunakan sebagai unit yang terisolasi atau dihubungkan dengan menampilkan Gambaran atau workstation lain. Ketinggian konsol harus dihitung sehingga operator bertubuh kecil dapat melihat display yang ada di dinding dari atas perangkat elektronik yang ada di meja. Worksurface harus mampu mengakomodasi operator yang tinggi untuk duduk dengan nyaman. Tinggi mata maksimum operator terpendek adalah 5 persen dari operator dengan tinggi paling tidak 42”, tergantung pada penyesuaian kursi.
Gambar 2.69 Sudut Pandang Horizontal Operator dalam Kontrol Room
Layout fisik harus mengakomodasi penggunaan peralatan non-elektronik
dan dokumen, seperti: manual operasi, buku log, peta, dan clipboard. Sebuah area bebas juga harus dipertimbangkan untuk posisi barang-barang seperti telepon,
keyboard, mouse, kontroler radio / interkom dan area menulis. Hal ini akan
memungkinkan operator untuk mengubah postur selama shift mereka dan meminimalkan efek dari kelelahan.
2.3.1.3 Display / Monitor
Bila menggunakan pendekatan top-down untuk merancang tampilan
layout, sebaiknya dimulai dari tujuan utamanya daripada mencoba untuk melihat
berapa banyak monitor dapat mengelilingi operator. Perlu diingat, bahwa jumlah informasi yang dapat ditangani oleh individu sangat terbatas. Untuk memaksimalkan kinerja operator, desainer harus tahu jumlah aktivitas yang terkait dengan setiap Gambar monitor dan ukurannya secara detail, keduanya akan mempengaruhi kepekaan terhadap peristiwa penting. Bahkan dengan sesedikitnya empat monitor, deteksi aktivitas secara akurat dalam lingkungan yang sibuk dapat menurun hingga 83 persen.
Tampilan yang digunakan untuk pemeriksaan yang detail / teliti harus diposisikan langsung di depan operator, dengan ukuran layar biasanya berkisar antara 19” sampai 24”. Tampilan di luar workstation dan diposisikan pada jarak yang lebih jauh atau di belakang konsol harus berkisar dalam ukuran dari 24”sampai 42” atau lebih besar.
Masuknya teknologi layar datar dan teknologi layar sentuh memiliki dampak yang signifikan pada desain konsol. Monitor tabung sinar katoda (CRT)
![Gambar 2.6 Konfigurasi Supervisory Control dalam DCS [1]](https://thumb-ap.123doks.com/thumbv2/123dok/4404312.2953151/15.892.266.668.364.597/gambar-konfigurasi-supervisory-control-dalam-dcs.webp)
![Gambar 2.11 Topologi Jaringan Profibus [1]](https://thumb-ap.123doks.com/thumbv2/123dok/4404312.2953151/19.892.259.701.323.571/gambar-topologi-jaringan-profibus.webp)
![Gambar 2.15 Komponen yang membutuhkan maintenance dalam system SCADA [1]](https://thumb-ap.123doks.com/thumbv2/123dok/4404312.2953151/22.892.315.621.554.870/gambar-komponen-yang-membutuhkan-maintenance-dalam-system-scada.webp)