BAB 2
LANDASAN TEORI
2.1 Perangkat Keras
Perangkat keras merupakan bentuk fisik dari pengukur konsentrasi alkohol yang terdiri dari modul power supply, sistem minimum ATMega8535, pengkondisi sinyal, LCD interface, LCD display.
2.1.1 Pengolahan Data Mikrokontroler ATMega8535
Mikrokontroler dengan arsitektur RISC kini semakin berkembang pesat dan semakin banyak diminati dalam aplikasi sistem kendali. Salah satu jenis mikrokontroler RISC yang banyak beredar di pasaran adalah mikrokontroler jenis AVR dari Atmel. Mikrokontroler AVR memiliki konsep yang hampir sama dengan mikrokontroler PICmikro dari Microchip Inc.yang memiliki arsitektur RISC 8-bit.
ATMega8535 adalah mikrokontroler AVR (alf and Vegard’s Risc processor) memiliki arsitektur RISC 8-bit, dimana semua instruksi dikemas dalam kode 16-bit (16-bits words) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock. Ini terjadi karena AVR berteknologi RISC (Reduced Instruction Set Computing) atau memiliki set instruksi yang lebih sederhana, sedangkan seri MCS-51 berteknologi CISC (Complex Instruction Set Computing) atau set instruksi yang kompleks.
Mikrokontroler AVR Atmel memiliki 118 macam instruksi asembler utama, namun terdapat beberapa instruksi yang bila dieksekusi menghasilkan kode yang sama. Sehingga instruksi asembler yang sebenarnya hanya 79 macam instruksi. Beberapa tipe AVR memiliki beberapa tambahan instruksi yang tidak terdapat pada tipe AVR yang lain.
AVR memiliki register keperluan umum (General Purpose Register – GPR) sebanyak 32 register. Semua operasi aritmatika dan logika dilakukan pada GPR. Memori data yang tersedia pada AVR ada yang mencapai 64 KB dan dapat dialamati baik secara langsung maupun tidak langsung menggunakan instruksi Load/Store. Pada pengalamatan tidak langsung, bagian lain GPR digunakan sebagai pointer (petunjuk) pengalamatan tidak langsung. GPR dan register I/O juga dipetakan pada bagian bawah memori data dan dapat diakses menggunakan intruksi-instriksi Load/Store.
Mikrokontroler AVR memiliki jenis memori program flash yang dapat diprogram ulang. Selain itu, hampir semua mikrokontroler AVR memiliki memori EEPROM yang terintegrasi dalam perangkat AVR tersebut. Pemograman AVR tergolong mudah karena pemograman AVR menggunakan teknik ISP (In- System Programing), yaitu kode hasil kompilasi berupa file HEX dapat langsung didownload pada mikrokontroler di dalam rangkaian aplikasi. Pada pemrograman ISP, jalur yang dibutuhkan untuk pemrograman hanya tiga jalur untuk sinyal pemrograman.
2.1.1.1 Arsitektur ATMega8535
Kemampuan umum dari ATMega8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimum 16 MHz.
2. Kapabilitas memori flash 8 KB, SPAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan ketelitian 10 bit sebanyak 8 channel
4. Port Komunikasi serial (USART) dengan kecepatan maksimum 2,5 Mbps. 5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
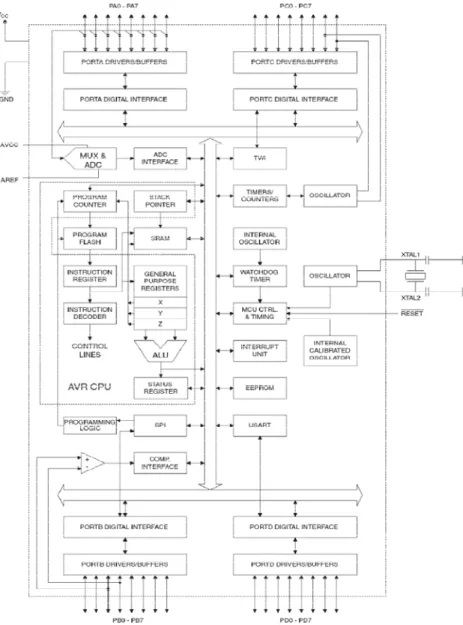
Gambar 2.1 Diagram Blok Fungsional ATMega8535
Dari gambar tersebut dapat dilihat bahwa ATMega8535 memiliki bagian sebagai berikut :
1. Saluran I/O sebanyak 32 saluran, yaitu Port A, Port B, Port C, dan Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
Gambar 2.2 Pin ATMega8535
Mikrokontroler ATMega8535 merupakan mikrokontroler CMOS dengan daya rendah yang memiliki arsitektur AVR 8-bit. Arsitektur ini mendukung kemampuan untuk melaksanakan eksekusi instruksi hanya dalam satu siklus clock osilator. Mikrokontroler AVR ATMega 8535 memiliki model arsitektur Harvard, dimana memori dan bus untuk program dan data dipisahkan. Dalam arsitektur ke ALU prosesor. Hal inilah yang membuat AVR begitu cepat dalam mengeksekusi instruksi. Dalam satu siklus clock, terdapat dua register independen yang dapat diakses oleh satu instruksi. Teknik yang digunakan adalah flect during execution atau memegang sambil mengerjakan. Hal ini berarti, dua operan dibaca dari dua register, dilakukan eksekusi operasi dan hasilnya disimpan kembali dalam salah satu register, semuanya dilakukan hanya dalam satu siklus clock.
2.1.1.2 Status Register (SREG) ATMega8535
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.3 Status Register ATMega8535
1. Bit 7-I : Global Interrupt Enable
Bit harus diset untuk meng-enable interupsi. Setelah itu anda dapat mengaktifkan interupsi mana yang akan digunakan dengan cara meng-enable bit kontrol register yang bersangkutan secara individu. Bit akan di-clear apabila terjadi suatu interupsi yang dipicu oleh hardware, dan bit tidak akan mengizinkan terjadinya interupsi, serta akan diset kembali oleh instruksi RETI.
2. Bit 6-T : Bit Copy Storage
Instruksi BLD dan BST menggunakan bit-T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BTS, dan sebaliknya bit-T dapat disalin kembali ke suatu bit dalam register GPR menggunakan instruksi BDL.
3. Bit 5-H : half Carry Flag 4. Bit 4-S : Sigh Bit
Bit-S merupakan hasil operasi EOR antara Flag-N (negatif) dan flag V (komplemen dua overflow).
5. Bit 3-V : Two’s Complement Overflow Flag Bit berguna untuk mendukung operasi aritmatika. 6. Bit 2-N : Negative Flag
Apabila suatu operasi menghasilkan bilangan negatif, maka flag-N akan di-set. 7. Bit 1-Z : Zero Flag
8. Bit 0-C : Carry Flag
Apabila suatu operasi menghasilkan carry, maka bit akan di-set.
2.1.1.3 Peta Memori ATMega8535
AVR ATMega 8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM internal.
Dalam organisasi memori AVR, 32 register keperluan umum (GPR) menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Sedangkan register-register khusus, untuk penanganan I/O dan kontrol terhadap mokrokontroler, menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register-register ini merupakan register yang khusus digunakan untuk melakukan pengaturan fungsi terhadap berbagai periperal mikrokontroler seperti kontrol register, timer/counter, fungsi-fungsi I/O, dan sebagainya. Register khusus alamat memori dapat dilihat pada datasheet ATMega8535 yang terdapat pada lampiran dua. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F.
AVR ATMega8535 memiliki 4Kbyte x 16 bit Flash Perom dengan alamat mulai dari $000 sampai $FFF. AVR tersebut memiliki 12-bit Program Counter (PC) sehingga mampu mengalamati ini Flash. Selain itu AVR ATMega8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.1.1.4 Port I/O ATMega8535
Port I/O pada mikrokontroler ATMega8535 dapat difungsikan sebagai input ataupun dengan keluaran high atau low. Untuk mengatur fungsi port I/O sebagai input ataupun output perlu dilakukan setting pada DDR dan Port. Berikut tabel pengaturan port I/O.
Tabel 2.1 Konfigurasi Setting untuk Port I/O
DDR bit = 1 DDR bit = 0 Port bit = 1 Output High Input pull-up
Port bit = 0 Output Low Input Floating
Dari tabel di atas, menyeting input/output adalah : 1. Input ; DDr bit 0 dan Port bit 1
2. Output High ; DDR bit 1 dan Port bit 1 3. Output Low ; DDR bit 1 dan Port bit 0
Logika port I/O dapat berubah-ubah dalam program secara byte atau hanya bit tertentu. Mengubah sebuah keluaran bit I/O dapat dilakukan menggunakan perintah cbi (clear bit I/O) untuk menghasilkan output low atau perintah sbi (set bit
I/O) untuk menghasilkan output high. Perubahan secara byte dilakukan dengan
perintah in atau out yang menggunakan register bantu.
Port I/O sebagai output hanya memberikan arus sourcing sebesar 20mA sehingga untuk menggerakkan motor atau kendali alat elektronis yang lain, perlu diberikan penguat tambahan atau dapat juga dengan konfigurasi port sebagai sinking current, seperti pada port yang digunakan untuk menyalakan LED, yang akan menyala saat port diberikan logika low dan mati saat port logika high.
2.1.2 Sensor TGS 822
Elemen penginderaan pada sensor gas Figaro terbuat dari sebuah dioksida timah (SnO2) semikonduktor yang memiliki konduktivitas rendah di udara bersih. Dengan
adanya gas yang terdeteksi, maka konduktivitas sensor meningkat tergantung pada konsentrasi gas di udara. Sebuah rangkaian listrik sederhana dapat mengkonversi perubahan konduktivitas tersebut untuk menghasilkan sinyal output yang sesuai dengan konsentrasi gas. TGS 822 memiliki sensitivitas yang tinggi terhadap uap pelarut organik serta bahan lainnya yang mudah menguap. Ia juga memiliki kepekaan terhadap berbagai gas yang mudah terbakar seperti karbon monoksida, sehingga membuatnya sebagai sensor serbaguna yang baik. Juga tersedia dengan bahan dasar
keramik yang sangat tahan terhadap lingkungan yang ekstrim setinggi 200 ° C (untuk model TGS 823).
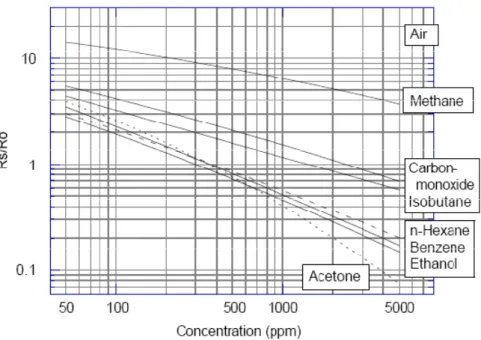
Gambar di bawah ini merepresentasikan karakteristik dari sensitifitasnya, semua data yang telah dikumpulkan sesuai dengan kondisi tes standar (lihat sisi balik lembar ini). Sumbu-Y menunjukkan perbandingan resistansi dari sensor (Rs / Ro) yang didefinisikan sebagai berikut:
Rs = resistansi sensor yang ditampilkan di berbagai konsentrasi Ro = hambatan sensor pada 300 ppm etanol
Sensitivitas Karakteristik
Gambar 2.4 Sensitivitas karakteristik
Gambar di bawah ini merepresentasikan karakteristik ketergantungan berdasarkan suhu dan kelembaban. Sekali lagi, sumbu-Y menunjukkan perbandingan resistensi dari sensor (Rs / Ro), yang didefinisikan sebagai berikut:
Rs = hambatan sensor pada 300ppm etanol pada berbagai suhu / kelembaban. Ro = hambatan sensor pada 300ppm etanol pada 20 ° C dan 65% R.H.
Suhu / Kelembaban Dependensi:
Gambar 2.5 Suhu/kelembaban depedensi
Struktur dan Dimensi:
Gambar 2.6 Struktur dan dimensi
Elemen Sensor:
1. SnO2 disedimentasi untuk membentuk sebuah film tebal di atas permukaan
tabung keramik alumina berisi pemanas internal. 2. Cap : Nylon 66.
4. Flame Arrestor: 316 SUS mesh kasa ganda. Koneksi Pin dan Cara Pengukuran Rangkaian Dasar:
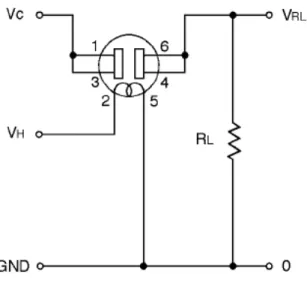
Angka-angka yang ditampilkan di sekitar simbol sensor di diagram sirkuit di sebelah bawah sesuai dengan nomor pin ditunjukkan pada gambar struktur sensor (di atas). Ketika sensor terhubung seperti yang ditunjukkan pada rangkaian dasar, output di Resistor Beban (VRL) meningkat sesuai dengan resistansi sensor (Rs) yang menurun,
tergantung pada konsentrasi gas.
Pengukuran Rangkaian Dasar:
Gambar 2.7 Pengukuran rangkaian dasar
Prinsip kerja rangkaian sensor di atas akan dijelaskan sebagai berikut. Pada saat sensor diberi tegangan input (VC) dan tegangan heater (VH) dan diletakkan pada
udara bersih, maka resistansi sensor RS akan turun secara cepat sehingga tegangan
yang melintasi tahanan beban (RL) akan naik secara cepat pula kemudian turun sesuai
dengan naiknya nilai RS kembali sampai mencapai nilai yang stabil, kondisi ini
disebut "Initial Action". Pada saat ada uap alkohol yang masuk ke dalam sensor, nilai resistansi sensor (RS) akan turun sesuai dengan besarnya konsentrasi uap alkohol di
udara pada saat itu. Kenaikan R, ini akan menyebabkan tegangan pada RL, atau VRL
Dengan:
VC = Tegangan input sensor, Volt
VRL = Tegangan output sensor, Volt
RS = Tahanan sensor, Ohm
RL = Tahanan beban, Ohm
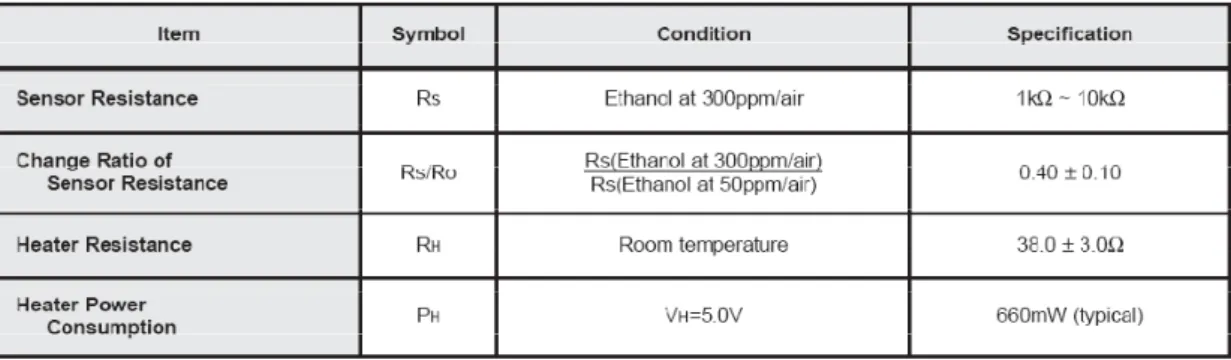
Sedangkan disipasi daya pada elektroda sensor (PS) dirumuskan sebagai berikut :
Tabel 2.2 Standar Circuit Kondisi
2.1.3 Modul LCD (Liquid Crystal Display) M1632
M1632 merupakan modul LCD matrix dengan konfigurasi 16 karakter dan 2 baris dengan setiap karakternya dibentuk oleh 8 baris pixel dan 5 kolom pixel (1 baris pixel terakhir adalah kursor). HD44780 ini sudah tersedia dalam Modul M1632 yang dikeluarkan oleh Hitachi, Hyundai dan modul-modul M1632 lainnya.
HD44780 sebetulnya merupakan mikrokontroler yang dirancang khusus untuk mengendalikan LCD dan mempunyai kemampuan untuk mengatur proses scanning pada layar LCD yang terbentuk oleh 16 COM dan 40 SEG sehingga mikrokontroler /perangkat yang mengakses modul LCD ini tidak perlu lagi mengatur proses scanning pada layar LCD. Mikrokontroler atau perangkat tersebut hanya mengirimkan data-data yang merupakan karakter yang akan ditampilkan pada LCD atau perintah yang mengatur proses tampilan pada LCD saja.
2.1.3.1 Kaki-kaki Modul M1632
Untuk keperluan antarmuka suatu komponen elektronik dengan mikrokontroler, perlu diketahui fungsi dari setiap kaki yang ada pada komponen tersebut.
1. Kaki 1 (GND)
Kaki ini berhubungan dengan tegangan +5 Volt yang merupakan tegangan untuk sumber daya dari HD44780 (khusus untuk modul M1632 keluaran hitachi, kaki ini adalah VCC).
2. Kaki 2 (VCC)
Kaki ini berhubungan dengan tegangan 0 volt (ground) dan modul LCD (khusus untuk modul M1632 keluaran hitachi, kaki ini adalah GND).
3. Kaki 3 (VEE/VLCD)
Tegangan pengatur kontras LCD, kaki ini terhubung pada V5. Kontras mencapai nilai maksimum pada saat kondisi kaki ini pada tegangan 0 volt.
4. Kaki 4 (RS)
Register Select, kaki pemilih register yang akan diakses. Untuk akses ke register data, logika dari kaki ini adalah 1 dan untuk akses ke register perintah, logika dari kaki ini adalah 0.
5. Kaki 5 (R/W)
Logika 1 pada kaki ini menunjukkan bahwa modul LCD sedang pada mode pembacaan dan logika 0 menunjukkan bahwa modul LCD sedang pada mode penulisan. Untuk aplikasi yang tidak memerlukan pembacaan data pada modul LCD, kaki ini dapat dihubungkan langsung ke ground.
6. Kaki 6 (E)
Enable Clock LCD, kaki ini mengaktifkan clock LCD. Logika 1 pada kaki ini diberikan pada saat penulisan atau pembacaan data.
7. Kaki 7-14 (D0-D7)
Data bus, kedelapan kaki modul LCD ini adalah bagian dimana aliran data sebanyak 4 bit atau 8 bit mengalir saat proses penulisan maupun pembacaan data.
8. Kaki 15 (Anoda)
Berfungsi untuk tegangan positif dari backlight modul LCD sekitar 4,5 volt (hanya terdapat untuk M1632 yang memiliki backlight).
9. Kaki 16 (Katoda)
Tegangna negatif backlight modul LCD sebesar 0 volt (hanya untuk M1632 yang memiliki backlight).
2.1.3.2 Struktur Memori LCD
Modul LCD M1632 memiliki beberapa jenis memori yang digunakan untuk menyimpan atau memproses data-data yang akan ditampilkan pada layar LCD. Setiap jenis memori mempunyai fungsi-fungsi tersendiri.
1. DDRAM
DDRAM merupakan memori tempat karakter yang ditampilkan berada. Contohnya, karakter “A” atau 41h yang ditulis pada alamat 00 akan tampil pada baris pertama dan kolom pertama dari LCD. Apabila karakter tersebut
ditulis di alamat 40h, karakter tersebut akan tampil pada baris kedua kolom pertama dari LCD.
2. CGRAM
CGRAM adalah memori untuk menggambarkan pola sebuah karakter dan bentuk karakter dapat diubah-ubah sesuai keinginan. Akan tetapi isi memori akan hilang saat power supply tidak aktif sehingga pola karakter akan hilang. 3. CGROM
CGROM adalah memori untuk menggambarkan pola sebuah karakter dan pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga pengguna tidak dapat mengubah lagi. Oleh karena ROM bersifat permanen, pola karakter tersebut tidak akan hilang walaupun power supply tidak aktif.
2.2 Perangkat Lunak
Perangkat lunak merupakan program yang meliputi bahasa pemrograman BASCOM-AVR untuk pemrograman mikrokontroler ATMega8535 dan Eagle untuk perancangan gambar skematik dari rangkaian.
2.2.1 Bahasa BASIC Menggunakan BASCOM-AVR
BASCOM-AVR adalah program BASIC compiler berbasis Windows untuk mikrokontroler keluarga AVR seperti ATMega8535, ATMega16, dan yang lainnya. BASCOM-AVR merupakan pemrograman dengan bahasa tingkat tinggi BASIC yang dikembangkan dan dikeluarkan oleh MCS Elektronik.
2.2.1.1 Kontrol program
Keunggulan sebuah pemrograman terletak pada kontrol program. Dengan kontrol program, kita dapat mengendalikan alur sebuah program dan menentukan apa yang harus dilakukan oleh sebuah program ketika menemukan sebuah kondisi tertentu. Kontrol program meliputi kontrol pertimbangan kondisi dan keputusan, kontrol pengulangan, serta kontrol alternatif. BASCOM menyediakan beberapa kontrol
program yang sering digunakan untuk menguji sebuah kondisi, perulangan, dan pertimbangan sebuah keputusan berikut adalah beberapa kontrol program yang sering digunakan dalam pemrograman dengan BASCOM.
1. IF...THEN
Dengan pernyataan If...Then, kita dapat mengetes kondisi tertentu, kemudian menentukan tindakan yang sesuai dengan kondisi yang diinginkan. Sintaksis penulisannya sebagai berikut :
IF <syarat kondisi>THEN<pernyataan>
Sintaksis diatas digunakan jika hanya ada satu kondisi yang diuji dan hanya melakukan satu tindakan. Jika melakukan lebih dari satu tindakan, maka sintaksisnya adalah :
IF < Syarat kondisi> THEN
<pernyataan ke-1> <pernyataan ke-2> . . <pernyataan ke-n> END IF
Jika ada dua kondisi atau lebih yang akan diuji, maka sintaksisnya menjadi :
IF <syarat kondisi 1> THEN
<blok pernyataan ke 1>
ELSEIF <syarat kondisi 2> THEN
<blok pernyataan ke 2> .
.
ELSEIF <syarat kondisi ke n>THEN
<blok pernyataan ke n>
ELSE
<blok pernyataan>
END IF
2. SELECT...CASE
Perintah Select...Case akan mengeksekusi beberapa blok pernyataan tergantung pada nilai variabelnya. Sintaksisnya sebagai berikut :
SELECT CASE variabel CASE test1 : Statements CASE test2 : Statements CASE ELSE : Statements END SELECT
3. WHILE...WEND
Perintah While...Wend akan mengeksekusi sebuah pernyataan secara berulang ketika masih menemukan kondisi yang sama. Perintah akan berhenti jika ada perubahan kondisi dan melakukan perintah selanjutnya. Sintaksisnya sebagai berikut :
WHILE <syarat kondisi>
<pernyataan>
WEND
4. EXIT
Perintah Exit digunakan untuk keluar secara langsung dari blok program For...Next, Do...Loop, Sub...Endsub, While...Wend. sintaksisnya sebagai berikut:
EXIT <Do> <For> <While> <Sub>
5. GOSUB
Dengan Gosub, program akan melompat ke sebuah label dan akan menjalankan program yang ada dalam subrutin sampai menemui perintah Return. Perintah Return akan mengembalikan program ke titik setelah Gosub. Sintaksisnya sebagai berikut :
Print ”coba rutin” GOSUB cabang Print ”Hello” END Cabang : X = X + 2 PRINT X RETURN 6. GOTO
Perintah GOTO digunakan untuk melakuakn percabangan. Perbedaannya dengan GOSUB adalah perintah GOTO tidak memerlukan perintah Return,
sehingga programnya tidak akan kembali ke titik dimana perintah GOTO berada. Berikut adalah sintaksisnya :
GOTO label
Lebel :
2.2.1.2 Compiler Directive
Compiler directive adalah statemen yang menunjukkan kondisi tertentu program yang harus diperhatikan oleh kompiler atau memberi tahu compiler hardware yang akan kita gunakan.
1. $CRYSTAL
Statemen untuk menentukan kristal yang digunakan dalam sistem minimum mikrokontroler.
Contoh : $crystal = 4000000 2. $FRAMESIZE
Statemen untuk menentukan ukuran frame. Contoh : $framesize = 40
3. $HWSTACK
Statemen menentukan tempat yang tersedia untuk hardwere Contoh : $hwstack = 32
4. $REGFILE
Statemen memerintahkan kompiler untuk menggunakan file register tertentu Contoh : $regfile = ”m8535.dat”
Pernyataan harus diletakkan pada posisi paling awal program. 5. $SWSTACK
Statemen menentukan tempat yang tersedia untuk softwere Contoh : $hwstack = 10
2.2.1.3 Operasi dalam BASCOM
Pada bagian ini akan dibahas tentang cara menggabungkan, memodifikasi, membandingkan, atau mendapatkan informasi tentang sebuah pernyataan dengan menggunakan operator-operator yang tersedia di BASCOM dan bagaimana sebuah pernyataan terbentuk dan dihasilkan dari operator-operator berikut:
1. Operator Aritmatika
Operator digunakan dalam perhitungan. Operator aritmatika meliputi + (tambah), - (kurang), / (bagi), dan * (kali).
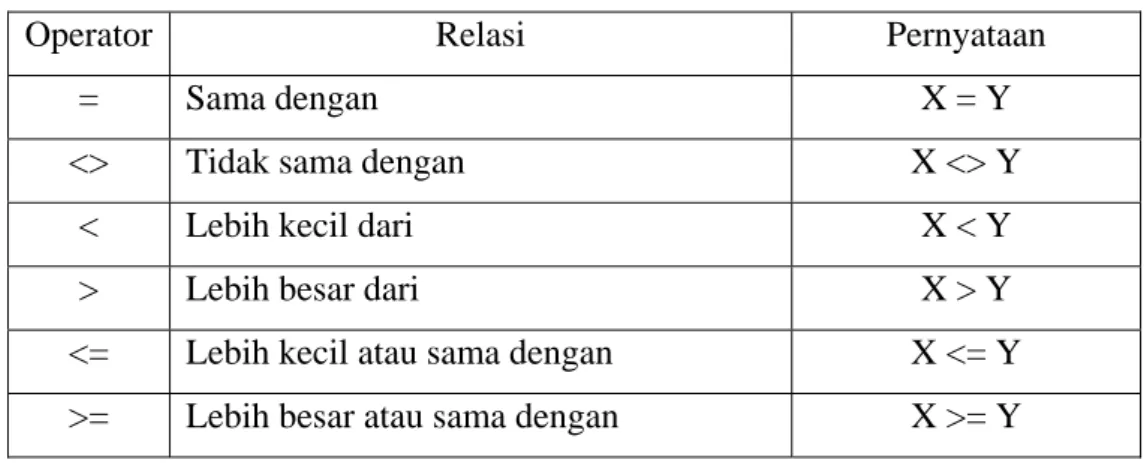
2. Operator Relasi
Operator berfungsi membandingkan nilai sebuah angka. Hasilnya dapat digunakan untuk membuat keputusan sesuai dengan program yang kita buat. Operator relasi meliputi:
Tabel 2.4 Tabel Operator Relasi
Operator Relasi Pernyataan
= Sama dengan X = Y
<> Tidak sama dengan X <> Y
< Lebih kecil dari X < Y
> Lebih besar dari X > Y
<= Lebih kecil atau sama dengan X <= Y >= Lebih besar atau sama dengan X >= Y
3. Operator Logika
Operator digunakan untuk menguji sebuah kondisi atau memanipulasi bit dan operasi bolean. Dalam BASCOM, ada empat buah operator logika, yaitu AND, OR, NOT, dan XOR.
Operator logika bisa pula digunakan untuk menguji sebuah byte dengan pola bit tertentu, sebagai contoh:
Dim A As Byte
A = 63 And 19 PRINT A
PRINT A Output
16 11
4. Operator Fungsi
Operasi fungsi digunakan untuk melengkapi operator yang sederhana.
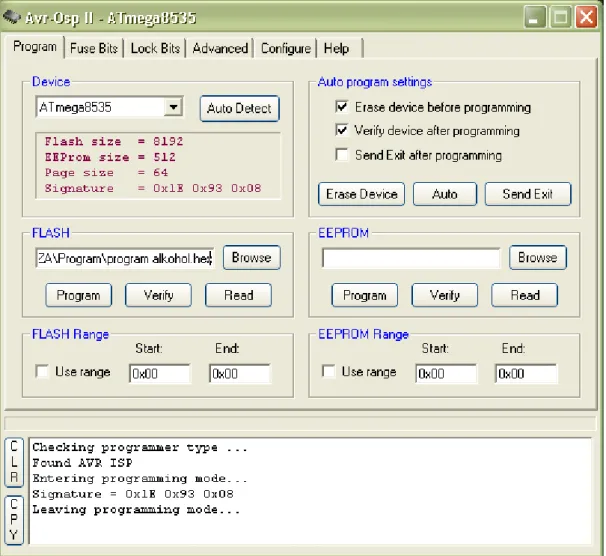
2.2.2 Software Downloader (Avr-Osp II)
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroler digunakan software Avr-Osp II yang dapat di download dari internet. Tampilannya seperti gambar 2.8 di bawah ini :
Cara menggunakannya adalah dengan meng-klik Auto Detect untuk pertama kali identifikasi mikrokontroler ATMega8535, dan jika berhasil maka akan terseleksi secara otomatis ATMega8535 pada bagian device. Kemudian klik Browse pada bagian FLASH untuk mengambil file heksadesimal dari hasil kompilasi BASCOM-AVR, kemudian klik Program untuk mengisikan hasil kompilasi tersebut ke mikrokontroler.