2. DASAR TEORI
Pada bab ini akan dijelaskan secara detail tentang teori – teori yang mendukung perancangan dan pembuatan Tugas Akhir ini.
2.1. Automatic Guided Vehicle
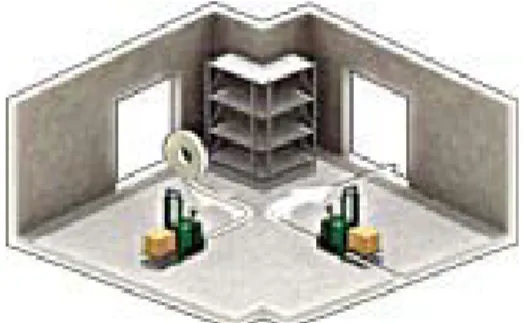
Automatic Guided Vehicle atau biasa disingkat AGV. AGV sendiri adalah robot beroda maupun berkaki yang digunakan untuk melakukan pekerjaan tertentu secara sendiri atau otomatis. Robot AGV banyak digunakan pada setiap industri manufaktur untuk memindahkan barang atau yang lainnya. Fungsi lain dari robot AGV adalah memindahkan barang dari gudang menuju operator, memindahkan barang dari gudang menuju ruang produksi atau mengirim barang dari mesin satu ke mesin yang lainnya dan masih banyak fungsi – fungsi robot tersebut didalam industri. Cara kerja dari robot AGV secara umum yaitu dengan memerintahkan robot secara manual melalui komputer, HMI, atau dengan secara otomatis dari mesin yang berkerja dan membutuhkan pemindahan barang. Mesin yang membutuhkan pemindahan barang tersebut akan mengirimkan perintah kepada server (Sevant Automation, 2016a). Pembawaan barang oleh robot AGV memiliki bermacam – macam metode, Pembawaan barang dengan mengangkat keranjang yang berisi barang (Gambar 2.1) dan menarik keranjang barang yang akan dipindahkan (Gambar 2.2). Berikut gambar – gambar robot AGV dalam pembawaan barang :
Gambar 2.1. Robot AGV mengangkat keranjang barang.
Sumber : (Sevant Automation, 2016b)
Gambar 2.2. Robot AGV menarik keranjang barang.
Sumber : (Sevant Automation, 2016b)
Robot AGV memiliki sistem navigasi yang bermacam – macam dan dengan algoritma yang berbeda – beda juga. Laser Guided Vehicle tersebut memiliki laser yang dipasang pada bagian atas robot AGV dan laser tersebut berputar untuk mendeteksi benda – benda sekitar.
Gambar 2.3. Robot AGV dengan Laser Navigation.
Sumber : (Roboticautomation, 2016)
Robot tersebut dapat mendeteksi benda – benda sekitar atau daerah sekitar sehingga robot mengetahui posisi sekarang. Posisi tersebut dibandingan dengan map yang telah diketahui. Magnetic Spot, menggunakan magnet silinder kecil yang
tertanam pada lantai. Berikut adalah gambar robot AGV dengan sistem navigasi Magnetic Spot :
Gambar 2.4. Robot AGV dengan magnetic spot.
Sumber : (Roboticautomation, 2016)
Penggunaan magnet pada lantai tersebut membantu robot dalam menentukan posisi robot sekarang. Posisi tersebut dibandingkan dengan server sehingga robot mengetahui arah yang benar. Optical or Magnetic Tapes and Wires, Penggunaan teknologi ini memanfaatkan garis panduan pada lantai, dapat dilihat pada gambar berikut :
Gambar 2.5. Robot AGV dengan mangetic tape.
Sumber : (Roboticautomation, 2016)
Teknologi ini memiliki harga yang lebih murah dan mudah untuk memasang atau merubah posisi garis tersebut. Cara kerja sistem ini dengan memerintahkan robot untuk mengikuti garis yang telah dipasang. Kelemahan pada teknologi ini adalah ketika jalur tersebut sering dilalui oleh manusia maupun robot, jalur tersebut bisa rusak atau kotor (Roboticautomation, 2016).
2.2. Algoritma Wavefront
Algoritma Wavefront banyak digunakan untuk pencarian rute dari start point hingga sampai ke goal point dengan mengetahui area kerja (Lavalle, 2016).
Area kerja tersebut dapat digambarkan dengan matrik yang diisi 0 untuk tempat yang kosong dan nilai 1 untuk tempat yang tidak bisa dilewati, dalam penyelesaian wavefront menggunakan koneksi antara tetangga. Penyelesaian algoritma ini dimulai dari titik goal itu dengan melakukan pengecekan tetangga yang berada disamping goal. Pengecekan tetangga memiliki 2 macam jenis pengecekan, yaitu von Neumann neighborhood dan Moore neighborhood (Varshavskaya, 2016).
Von Neumann neighborhood pengecekan yang melibatkan 4 kotak, yang berada di sekitar robot (atas, belakang, kanan, kiri), pengecekan dengan sistem ini dapat dilihat pada Gambar 2.6. Moore neighborhood sistem pengecekan ini melibatkan 8 kotak di sekitar robot, dengan mempertimbangan posisi kotak yang berada pada diagonal robot, sistem tersebut dapat dilihat pada Gambar 2.7.
Gambar 2.6. Sistem Von Neumann neighborhood Sumber : (Varshavskaya, 2016)
Gambar 2.7. Sistem Moore neighborhood Sumber : (Varshavskaya, 2016)
Pemilihan sistem pengecekan penting dilakukan dengan mempertimbangkan kemampuan robot dalam menjalankan tugas, berikut langkah penyelesaian algoritma Wavefront, pertama – tama tentukan denah atau matrik yang akan terlusuri, titik goal dan titik start, setelah menentukan titik tersebut lakukan pengisian nilai matrik dengan salah satu metode pengecekan di atas atau
dengan mengisi nilai matrik dari titik goal, dan bergeser satu persatu hingga menuju titik start, pengisian matrik dilakukan dengan nilai matrik, ditambah dengan 1 untuk setiap langkah yang dilakukan, pada posisi start akan didapatkan angka dengan nilai tertentu. Angka tersebut adalah langkah yang dibutuhkan robot untuk menuju ke titik goal. Robot akan mengikuti angka – angka pada matrix tersebut hingga menuju pada matrix yang bernilai 1 atau goal (Lavalle, 2016). Berikut adalah implementasi algoritma wavefront tersebut untuk pencarian jalur robot menuju tujuan :
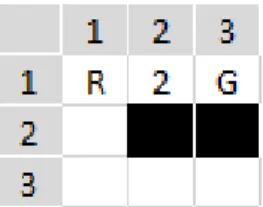
1. Pertama Inisialisasi map yang digunakan, titik awal robot, dan goal atau tujuan robot Gambar 2.8.
Gambar 2.8. Inisialisasi map algoritma wavefront.
Pada Gambar 2.8 matrix map yang digunakan berukuran 3 x 3 dengan “G”
sebagai titik tujuan robot dan “R” adalah posisi pertama robot. Titik putih pada matrix tersebut adalah jalan yang dapat dilalui oleh robot.
2. Penggunaan metode Von Neumann neighborhood untuk melakukan pengecekan dan pengisian matrix. Pengisian matrix tersebut hingga mencapai titik awal robot. Hasil dari pengisian matrix tersebut dapat dilihat pada gambar berikut :
Gambar 2.9. Pengisian matrix map.
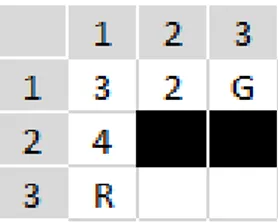
3. Melakukan perubahan posisi robot. Perubahan robot dengan mengambil nilai disekitar robot yang memiliki nilai paling kecil pada matrix ini nilai paling kecil adalah 6. Hasil perubahan posisi robot dapat dilihat pada gambar berikut :
Gambar 2.10. Perubahan posisi robot.
4. Lakukan langkah 1 – 3, maka didapatkan hasil perubahan posisi sesuai pada gambar berikut :
Gambar 2.11. Perubahan posisi robot langkah 4.
5. Setelah melakukan langkah 4, langkah selanjutnya mengulangi langkah 1 – 3, maka didapatkan hasil perubahan posisi sesuai pada gambar berikut :
Gambar 2.12. Perubahan posisi robot langkah 5.
6. Setelah melakukan langkah 5, langkah selanjutnya mengulangi langkah 1 – 3, maka didapatkan hasil perubahan posisi sesuai pada gambar berikut :
Gambar 2.13. Perubahan posisi robot langkah 6.
7. Setelah melakukan langkah 6, langkah selanjutnya mengulangi langkah 1 – 3, maka didapatkan hasil perubahan posisi sesuai pada gambar berikut :
Gambar 2.14. Perubahan posisi robot langkah 7.
Pada Gambar 2.14 terlihat bahwa posisi robot telah menemukan titik tujuan atau goal yang telah ditentukan pada inisialisasi map. Bertemunya robot dan titik goal tersebut mengakhiri algoritma wavefront ini, ketika robot belum menemukan titik tujuan maka algoritma tersebut akan mengulangi langkah 1 – 3 hingga mencapai titik goal.
2.3. Arduino Mega
Arduino adalah platform elektronik open source yang mudah digunakan baik hardware dan software, Arduino dapat membaca input cahaya menggunakan sensor,menekan tombol dengan jari, mengirim sebuah pesan dan mengubah output untuk menyalakan motor, menyalakan LED, mempublikasikan sesuatu secara online, dapat memerintah board Arduino dengan mengirimkan instruksi, untuk melakukan hal – hal tersebut dibutuhkan bahasa pemrograman Arduino dan perangkat lunak Arduino (IDE)(Acevedo, Vázquez, Durán, & Petrearce, 2015), Arduino yang akan digunakan pada robot AGV ini adalah Arduino Mega 2560.
Board Arduino Mega 2560 ini dapat ditenagai dengan sumber DC melalui USB maupun konektor DC yang berada pada board tersebut. Selain itu Arduino
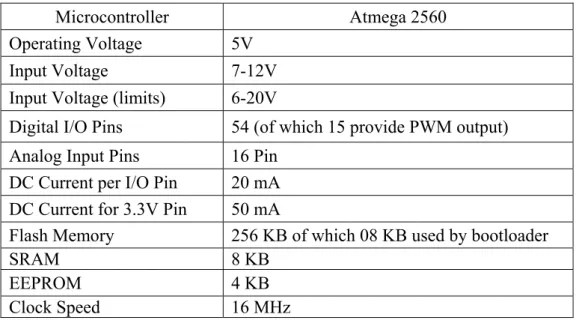
Mega 2560 ini juga dapat ditenagai melalui pin Vin pada Arduino itu. Board ini dapat diprogram melalui software yang disediakan di website Arduino. Berikut data spesifikasi Arduino Mega 2560 dengan bentuk dari Arduino Mega 2560 (Arduino, 2016a) :
Tabel 2.1. Spesifikasi Arduino Mega 2560
Microcontroller Atmega 2560
Operating Voltage 5V
Input Voltage 7-12V
Input Voltage (limits) 6-20V
Digital I/O Pins 54 (of which 15 provide PWM output) Analog Input Pins 16 Pin
DC Current per I/O Pin 20 mA DC Current for 3.3V Pin 50 mA
Flash Memory 256 KB of which 08 KB used by bootloader
SRAM 8 KB
EEPROM 4 KB
Clock Speed 16 MHz
Gambar 2.15. Arduino Mega 2560 Sumber : (Arduino, 2016b)
2.2. Sensor Warna Silver
Sensor warna untuk mendeteksi warna silver menggunakan 3 buah jenis TCRT5000, TCRT5000 adalah sensor dengan menggunakan infrared emitter dan photodiode dengan dilengkapi pembatas untuk menghalangi cahaya.
(Semiconductors, 2009). Sensor ini bekerja dengan memanfaatkan pantulan cahaya yang ditembakkan oleh infrared dan cahaya tersebut akan diterima oleh photodiode, cahaya yang diterima bervariasi sesuai dengan warna objek yang ditembak oleh infrared. Hasil yang diterma oleh photodiode akan dibaca oleh mikrokontroler.
Berikut penampakan fisik TCRT5000:
Gambar 2.16. TCRT5000 Sumber :(Semiconductors, 2009)
2.3. Ultrasonic
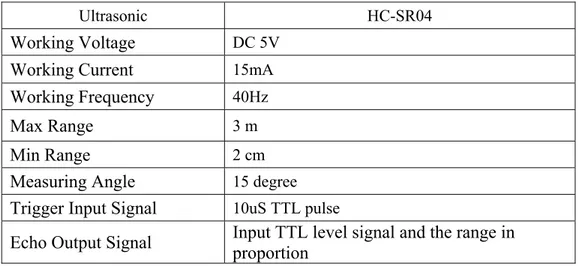
Ultrasonic menggunaan HC- SR04, HC-SR04 ini dapat mendeteksi 2 cm- 400 cm mengukur tanpa harus menyentuh benda yang diukur, akurasi dari alat ini mencapai 3mm, modul tersebut telah dilengkapi dengan ultrasonic Transmitter, receiver dan control circuit. Modul tersebut memiliki prinsip kerja, trigger untuk membuat modul mengirimkan delapan signal 40kHz dan mendeteksi sinyal kembali, jika sinyal kembali maka durasi dikali kecepatan suara dan dibagi 2, berikut adalah spesifikasi dan penampakan fisik modul tersebut (Freaks, 2012) :
Tabel 2.2. Tabel Spesifikasi HC-SR04
Ultrasonic HC-SR04
Working Voltage DC 5V
Working Current 15mA
Working Frequency 40Hz
Max Range 3 m
Min Range 2 cm
Measuring Angle 15 degree Trigger Input Signal 10uS TTL pulse
Echo Output Signal Input TTL level signal and the range in proportion
Gambar 2.17. Ultrasonic HC-SR04
2.4. Modul Wifi
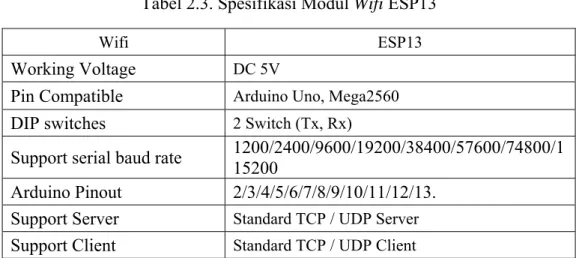
Modul wifi yang digunakan adalah wifi Shield ESP13 atau ESP8266.
ESP13 ini dilengkapi dengan chip wifi yang bekerja pada frekuensi 2,4 GHz, dan memiliki web server untuk mengatur modul tersebut. Modul wifi ini berfungsi untuk protokol transfer data dari robot 1 ke server dan dari robot 2 ke server. Data yang diterima oleh modul ini akan dirubah menjadi data serial dan diteruskan ke Arduino. Berikut spesifikasi modul wifi tersebut dan penampakan fisiknya (Logicware, 2016):
Tabel 2.3. Spesifikasi Modul Wifi ESP13
Wifi ESP13
Working Voltage DC 5V
Pin Compatible Arduino Uno, Mega2560 DIP switches 2 Switch (Tx, Rx)
Support serial baud rate 1200/2400/9600/19200/38400/57600/74800/1 15200
Arduino Pinout 2/3/4/5/6/7/8/9/10/11/12/13.
Support Server Standard TCP / UDP Server Support Client Standard TCP / UDP Client
Gambar 2.18. Wifi Shield ESP 13 Sumber : (Smartarduino, 2016)
2.5. Sensor KY-033
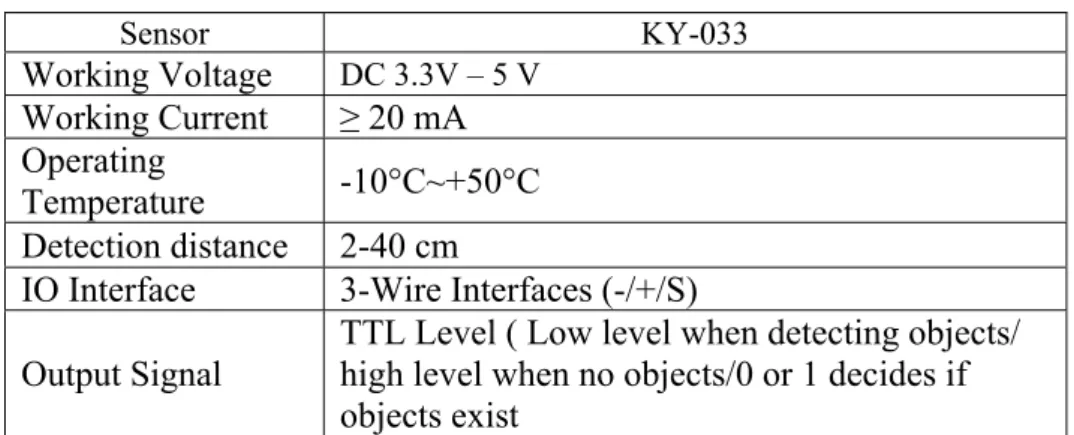
Sensor KY-033 adalah sebuah rangkaian elektronika yang menggunakan TCRT5000 untuk mendeteksi warna, rangkaian elektronika tersebut terdapat juga komparator untuk menerima output dari TCRT5000, dan menjadikan output dari komparator tersebut adalah sinyal digital. Sensor ini dapat membedakan warna hitam dan putih, dan untuk kepekaan dalam membedakan warna dapat diatur dengan variabel resistor yang terdapat pada rangkaian elektronika tersebut. Berikut adalah penampakan fisik dan spesifikasi lengkap yang dimiliki oleh KY-033 :
Tabel 2.4. Spesifikasi KY-033
Sensor KY-033
Working Voltage DC 3.3V – 5 V Working Current ≥ 20 mA Operating
Temperature -10°C~+50°C Detection distance 2-40 cm
IO Interface 3-Wire Interfaces (-/+/S)
Output Signal TTL Level ( Low level when detecting objects/
high level when no objects/0 or 1 decides if objects exist
Gambar 2.19. Sensor KY-033 Sumber : (Fabtolab, 2016)
2.6. Driver Motor
L298N adalah driver motor yang berbentuk modul, modul ini menggunakan IC L298. IC tersebut adalah merupakan IC berisi dua H-Bridge yang berarti modul ini dapat mengontrol 2 buah motor dan motor tersebut dapat diatur kecepatannya dengan PWM. Modul ini dapat menerima input tegangan sebesar 12V DC, dan modul ini terdapat regulator untuk mengeluarkan tegangan +5V DC.
Output ke motor dapat diatur dengan memberikan tegangan pada IN1, IN2, IN3, dan IN4. Berikut adalah tabel kontrol modul L298N dan bentuk fisik dari L298N :
Tabel 2.5. Kontrol Modul L298N
IN1 IN2 IN3 IN4 OUTPUT A OUTPUT B
5V 0V 5V 0V FORWARD FORWARD
0V 5V 0V 5V BACKWARD BACKWARD
0V 0V 0V 0V BRAKE BRAKE
5V 5V 5V 5V BRAKE BRAKE
Gambar 2.20. Modul L298N Sumber: (Oddwires, 2016)