ABSTRACT
Velocity was classic problem in physics at away back and also this time.
Velocity have congeniality of distance which gone through in one set of
time.With microcontroller can be conducted calculation of time in millisecond
order and interfacing using infra red sensor. At Infra Red, to avoid distraction
from other infra red radiation sources modulation have to beforehand with carrier
frequency. A photo-detector use microcontroller in awakening signal, till
processing of accepted signal yield output in the form of on-off signal. In this final
project, hardware is made using microcontroller and infra red sensor to measure
ABSTRAK
Kecepatan merupakan masalah klasik dalam ilmu fisika pada jaman
dahulu maupun sekarang ini. Kecepatan sendiri mempunyai pengertian jarak yang
ditempuh dalam satu satuan waktu. Dengan mikrokontroler dapat dilakukan
perhitungan waktu dalam orde milidetik dan antarmuka dengan menggunakan
sensor infra merah. Pada sensor infra merah untuk menghindari infra merah dari
radiasi sumber infra merah yang lain, maka penggunaan cahaya infra merah harus
dimodulasi terlebih dahulu dengan frekuensi pembawa.. Dalam tugas akhir ini
dibuat perangkat detektor menggunakan mikrokontroler dalam membagkitkan
sinyal dan mengolah sinyal yang diterima hingga menghasilkan keluaran berupa
sinyal on-off.Dan selanjutnya perangkat ini digunakan untuk mengukur kecepatan
dan panjang benda bergerak menggunakan sensor infra merah berbasiskan
IS1U60/IS1U60L
1. 1-package design owing to adoption of OPIC 2. Compact
*1 No dew condensation is allowed. *1
*2
Supply voltage
*2 For 5 seconds
Absolute Maximum Ratings
Parameter Symbol Rating Unit
0 to 6.0 - 10 to + 60 - 20 to + 70
Soldering area Soldering area
* "OPIC" (Optical IC) is a trademark of the SHARP Corporation. An OPIC consists of a light-detecting element and signal-processing circuit integrated onto a single chip.
VCC V
Recommended Operating Conditions
Parameter Symbol operating conditionsRecommended Unit 4.7 to 5.3 Operating supply voltage
(Volume : About 1/8 compared withGP1U58X) 3. B.P.F. (Band Pass Frequency) : (TYP. 38kHz)
Sensors with 1-Package Design of Remote Control Detecting Functions owing to OPIC
3 VCC
3 VCC
data books, etc. Contact SHARP in order to obtain the latest version of the device specification sheets before using any SHARP's device.”
“In the absence of confirmation by device specification sheets, SHARP takes no responsibility for any defects that occur in equipment using any of SHARP's devices, shown in catalogs,
■ ■
■
■
IS1U60/IS1U60L
*3 The burst wave as shown in the following figure shall be transmitted. *4 Pull-up resistance : 2.2kΩ
*5 By SHARP transmitter
Transmission signal
Output
Limiter Demodulator Integrator Comparator
fo=38kHz, Duty 50%
Internal Block Diagram Electrical Characteristics
Symbol Conditions MIN. TYP. MAX.
ICC No input light - 2.8 4.5
VOH *3, Output terminal OPEN
*3, *4
High level output voltage
Low level output voltage
High level pulse width
Low level pulse width
B.P.F. center frequency
Linear ultimate distance
Linear ultimate distance θ
= ± 15˚ (φ= 0˚ ) Ee< 10 lx
φ,θ= 0˚ , Ee< 10 lx
φ= ± 30˚ (θ = 0˚ )
■
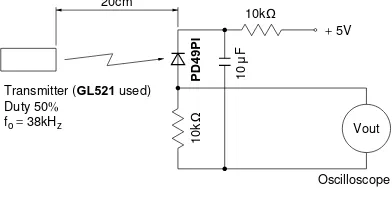
20cm
External disturbing light detector face illuminance : Ee
Transmitter
Reception distance : L
Using the transmitter shown in Fig. 1, the output signal of the light detecting unit is good enough to meet the following items in the standard optical system in Fig. 2. (1) Linear reception distance characteristics
When L=0.2 to 5 m, Ee < 10 lx ( *4) andφ=0˚ in Fig. 2, the output signal shall meet the electrical characteristics in the attached list. (2) Sensitivity angle reception distance characteristics
When L=0.2 to 3 m, Ee < 10 lx ( *4) andφ<= 30 ˚ in the direction X andθ =0˚ in the direction Y in Fig. 2,
the output signal shall meet the electrical characteristics in the attached list. Further, the electrical characteristics shall be met when L=0.2 to 5 m, Ee < 10 lx (*4) andφ=0˚ in the direction X andθ<= 15˚ in the direction Y.
Transmitter (GL521 used)
IS1U60/IS1U60L
*4 It refers to detector face illuminance.
In the above figure, the transmitter should be set so that the output Vout can be 40mV .
However, thePD49PI to be used here should be of the short-circuit current I =2.6µA at Ev=100 lx. (Ev is an illuminance by CIE standard light source A (tungsten lamp).)
P - P
SC
Fig. 1 Transmitter
Fig. 2 Standard optical system
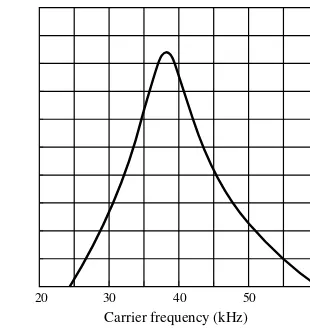
Fig. 1 B.P.F. Frequency Characteristics (TYP.) Fig. 2 Sensitivity Angle (Direction X) Characteristics (TYP.) for Reference
Fig. 3 Sensitivity Angle (Direction Y) Characteristics (TYP.) for Reference
Fig. 4 Relative Reception Distance vs. Ambient Temperature (TYP.) for Reference
Relative reception distance (%)
Ambient temperature Ta (˚C)
IS1U60/IS1U60L
Relative sensitivity (2dB/div)
Fig. 5 AEHA (Japan Association of Electrical Home Appliances) Code Pulse Width Characteristics (1st Bit) (TYP.) for Reference
Carrier frequency (kHz)
Unit AEHA code generating transmitter
T=430µs
Low level pulse width
High level pulse width
- 40 - 20 0 20 40 60 80 100
Relative reception distance (%)
Angular displacementφ
Relative reception distance (%)
20 30 40 50 60
Unit SHARP
standard transmitter
Relative comparison with reception distance at V =5V,φ=0˚ , Ee <10 lx and Ta=25 ˚C taken as 100%
Precautions for Operation (1) Use the light emitting unit (remote control transmitter), in consideration of performance, characteristics, operating conditions of
light emitting device and the characteristics of the light detecting unit.
(2) Pay attention to a malfunction of the light detecting unit when the surface is stained with dust and refuse.
Care must be taken not to touch the light detector surface.
• Conduct cleaning as follows.
(3) Cleaning
Solvent dip cleaning : Solvent temperature of 45 ˚C max., dipping time : Within 3 minutes
Ultrasonic cleaning : Elements are affected differently depending on the size of cleaning bath, ultrasonic output, time,
size of PWB and mounting method of elements.
Conduct trial cleaning on actual operating conditions in advance to make sure that no problem results.
• Use the following solvents only.
Solvents : Ethyl alcohol, methyl alcohol or isopropyl alcohol
(4) To avoid the electrostatic breakdown of IC, handle the unit under the condition of grounding with human body, soldering iron, etc.
(5) Do not apply unnecessary force to the terminal.
(6) Example of recommended external circuit (mount outer mounting parts near the sensor as much as possible.)
R1
C1
R1 = 47Ω ±5%
C1 = 47µF
Fig. 6 Spectral Sensitivity for Reference
Relative sensitivity (%)
Wavelengthλ (nm)
IS1U60/IS1U60L
IS1U60
LAMPIRAN A
FOTO ALAT
FOTO ALAT KESELURUHAN
LAMPIRAN B
PC display / monitor
LAMPIRAN C
PERANGKAT LUNAK MIKROKONTROLER
org 0h
tekan: jnb p1.3,tekan
mov b,#20
clr ti ret
delay:
LAMPIRAN D
LAMPIRAN E
PROGRAM C++ UNTUK TAMPILAN PADA LAYAR
KOMPUTER
#include <bios.h> #include <conio.h> #include <dos.h> #include <stdio.h>
#define com2 0x02f8 void main( )
{ char k ; int c; char u;
int inisialisasi (void)
{ int gdriver = DETECT, gmode, errorcode; initgraph(&gdriver, &gmode, “”);
errorcode = graphresult( ); if (errorcode != grok) }
inisialisasi ( ); setcolor(13) ;
line(50, 100, 600, 100) : outtextxy(233, 110, “menu”) ; setcolor(9);
outtextxy(85, 130, “PENGUKUR KECEPATAN”); setcolor(3);
outtextxy(200, 140, “tekan 1 untuk mengukur kecepatan“);
outtextxy(200, 150, “tekan 2 untuk mengukur panjang & identifikasi”); outtextxy(200, 160, “tekan 3 untuk reset”);
setcolor(8);
outtextxy(200, 170, “tekan 4 untuk exit”); line(50, 200, 600, 200) ;
outportb(com2, 0x31); outportb(com2+1, 0X01); outportb(com2+3, 0x03); outportb(com2+2, 0x0c7);
outportb(com2+4, 0x0B); do
{
c = inportb(com2+5) ;
if (c&1) { k = inportb(com2) ;printf(“%d”, k);} if (kbhit( )){ u = getch( ) ; }
}
while(u!=27);
if(d<5){printf(“ hasil = motor”)}; if(d=10){printf(“ hasil = mobil)}; if(d>10){printf(“ hasil = truk”)};
printf(“hasil kecepatan = “); printf(“\n selesai”); getch ( );
}
reset: {outportb(com2+3, 0x00); }
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kecepatan merupakan masalah klasik dalam ilmu fisika, mungkin pada
jaman dahulu sangat sulit untuk mengukur secara akurat kecepatan objek yang
bergerak. Hal ini disebabkan oleh tidak adanya sensor yang tepat, dan juga alat
ukur yang mampu menghitung dalam orde waktu yang akurat. Sensor infra merah
(infra red / IR) banyak digunakan baik sebagai pengukur, pengendali jarak dekat
(Remote Control), sistem keamanan, robotics, maupun dibidang industri. Alasan
mengapa dipilih sensor infra merah ini karena cahaya infra merah adalah
gelombang elektromagnetik yang tidak dapat diganggu oleh medan listrik dan
medan magnetik sehingga penggunaan cahaya ini sebagai transducer cukup aman
dan efektif. Di samping itu sensor infrared akan mengenali objek dalam bentuk
spektrum elektromagnetik yang dipancarkan oleh objek. Pada jaman sekarang
dimana dunia digital mulai menunjukan efisiensi dan kemudahan dalam
pengunaannya, mikrokontroler dapat melaksanakan perhitungan dalam orde
milidetik serta melakukan antarmuka dengan menggunakan sensor .
Dalam tugas akhir ini akan dirancang suatu perangakat untuk mengukur
kecepatan dan mengidentifikasi panjang benda bergerak dengan menggunakan
sinar infra merah sebagai sensor dan mikrokontroler sebagai pengendali.
1.2 Perumusan Masalah
Dengan meninjau latar belakang maka ada beberapa masalah utama yang
perlu dirumuskan, yaitu :
1. Bagaimana merancang dan merealisasikan perangkat alat untuk mengukur
2. Bagaimana memprogram mikrokontroler agar dapat bekerja sesuai dengan
yang diinginkan dalam hal ini mengukur kecepatan dan panjang benda
bergerak?
1.3 Tujuan
Tugas Akhir ini bertujuan mendesain dan membuat sebuah perangkat
detector dengan menggunakan mikrokontroler sehingga perangkat dapat berfungsi
sebagai detektor yang menghasilkan output berupa sinyal ON-OFF atau berupa
counter untuk pengukuran kecepatan benda bergerak.
1.4 Pembatasan Masalah
Dalam tugas akhir ini, di batasi hal-hal berikut :
o Alat hanya berupa prototype.
o Jarak sensor 1 dan sensor 2 sudah ditentukan terlebih dahulu sejauh
1 m.
o Asumsi Benda bergerak lurus.
1.5 Spesifikasi Alat
o Mikrokontroler AT89C52.
o Sensor infra merah dan foto elektrik detector.
o Layar komputer untuk menampilkan hasl dari perhitungan.
1.6 Sistematika Pembahasan
Tugas akhir ini disusun dalam lima bab dengan sistematika pembahasan
sebagai berikut :
Bab I Pendahuluan
Membahas mengenai latar belakang masalah, tujuan, perumusan
masalah, pembatasan masalah, spesifikasi alat, serta sistematika
Bab II Landasan Teori
Pada bab ini akan dibahas teori-toeri dasar yang berhubungan
dengan: tentang cahaya infrared, pengolahan sinyal pada
komunikasi infrared, sensor penerima infrared, serta
mikrokontroler AT89C52.
Bab III Perancangan dan Pembuatan Perangkat
Membahas tentang perancangan dan pembuatan perangkat keras
(hardware) maupun perangkat lunak (software).
Bab IV Pengujian Alat dan Pengamatan
Membahas tentang kemampuan alat lewat pengujian dan
mengamati serta mengumpulkan hasil-hasil yang diperoleh.
Bab V Kesimpulan dan Saran
Memaparkan kesimpulan yang diperoleh dan saran-saran untuk
BAB V
KESIMPULAN DAN SARAN
Dalam bab 5 ini akan dipaparkan kesimpulan-kesimpulan yang diambil
berdasarkan hasil pengujian serta saran.
V.1 Kesimpulan
Berdasarkan percobaan dan pengamatan yang telah dilakukan dalam tugas
akhir ini dapat disimpulkan bahwa :
• Alat pengukur kecepatan dan panjang benda bergerak menggunakan
mikrokontroler dan sensor infra merah berhasil direalisasikan.
• Mikrokontroler AT89C52 sangat baik dalam menghitung waktu karena bisa dalam orde mili detik.
V.2 Saran
Untuk pengembangan selanjutnya, disarankan agar:
DAFTAR PUSTAKA
• Agfianto Eko P , “BELAJAR MIKROKONTROLLER AT89C51/52/55 TEORI DAN APLIKASI”, GAVA MEDIA, Yogyakarta, 2002.
• M Marston R, “OPTOELECTRONICS CIRCUITS MANUAL”, second edition, Newnes, 1999.
• Joseph Carr J, “SENSORS AND CIRCUITS”, Prentice-Hall, 1993.
• Budiharto, Widodo, “Interfacing Komputer dan Mikrokontroler”,
PT Elex Media Komputindo, 2004.
• http://www.innovativeelectronics.com