BAB I
PENDAHULUAN
Pada bab ini dijelaskan tujuan dan latar belakang permasalahan yang mendasari pembuatan skripsi, spesifikasi alat yang akan direalisasikan dan sistematika penulisan skripsi.
Tujuan I.1.
Membuat sistem kendali baru pada robot WowWee Robosapien yang dikendalikan menggunakan komputer dan mobile smart phone dengan menggunakan media transmisi wifi.
Latar Belakang I.2.
Robosapien adalah robot pertama yang berdasarkan pada ilmu terapan robotika
biomorphic. Robosapien memiliki gerakan gerakan yang dinamis, sensor interaktif dan kepribadian yang unik. Robosapien dibuat memiliki gerakan dan dirancang seperti memiliki kecerdasan menyerupai manusia[9].
WowWee Robosapien dikendalikan menggunakan remote control yang menggunakan infra merah sebagai media transmisi data. Kendali jarak jauh yang dikembangkan oleh WowWee bersifat line of sight yang artinya hanya dapat dipancarkan seperti garis lurus dari kendali ke robot tersebut. Kendali jarak jauh WowWee Robosapien yang menggunakan infra merah hanya dapat menempuh jarak 6 meter dan tidak dapat dipancarkan jika terdapat media penghalang diantara remote control dengan robot, maka akan dikembangkan kendali jarak jauh yang sifatnya tidak
2
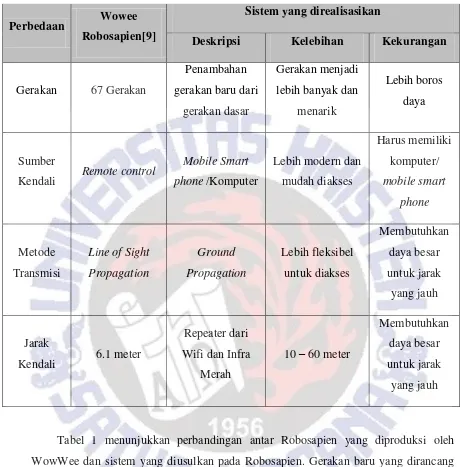
Tabel 1.1. Tabel Perbandingan WowWee Robosapien dengan sistem yang dirancang.
Tabel 1 menunjukkan perbandingan antar Robosapien yang diproduksi oleh WowWee dan sistem yang diusulkan pada Robosapien. Gerakan baru yang dirancang merupakan gerakan - gerakan gabungan dari gerakan dasar pada robot WowWee Robosapien, seperti gerakan mengambil barang yang sebelumnya dilakukan dari beberapa instruksi, dapat dikendalikan hanya dengan memberi satu instruksi.
Sistem kendali yang akan dikembangkan akan dibuat menggunakan sistem kendali loop terbuka atau Feed Forward Control yaitu suatu sistem kontrol yang keluarannya tidak diperhitungkan ulang oleh controller. Jenis kendali ini sesuai untuk sistem operasi robot yang bekerja dengan langkah sekuensial atau sesuai dengan urutan program[1]. Pada Gambar 1.1 menjelaskan bahwa jenis kendali ini tidak berpengaruh pada hasil gerakan robot.
Perbedaan Wowee
Robosapien[9]
Sistem yang direalisasikan
Deskripsi Kelebihan Kekurangan
3
Gambar 1.1.Diagram Blok Kontrol Loop Terbuka
Kendali jarak jauh yang akan dirancang bersifat repeater yang artinya akan terjadi dua proses pengiriman data. Kendali jarak jauh akan dibuat menggunakan media transmisi wifi yang dikendalikan dari sebuah komputer atau mobile smart phone, data atau instruksi yang didapatkan dari komputer atau mobile smart phone akan diterjemahkan oleh mikrokontroler menjadi sekumpulan bit yang akan dikirim kepada robot WowWee Robosapien yang selanjutnya diubah menjadi gerakan atau tindakan. Metode transmisi dibuat menjadi ground propagation yang mengadaptasi dari media transmisi wifi, sehingga pengguna dapat lebih mudah mengendalikan robot WowWee Robosapien tanpa terlalu mengkhawatirkan ruangan pengendali, karena data dapat dikirim walaupun terdapat penghalang, dalam hal ini penghalang dibatasi dalam bentuk tembok atau kayu, pengiriman data yang baik juga diiringi dengan daya pemancar wifi yang masih dapat diterima dengan kuat.
Spesifikasi Sistem I.3.
Sesuai dengan surat tugas skripsi yang dikeluarkan oleh Fakultas Teknik Elektronika dan Komputer Universitas Kristen Satya Wacana dengan nomor 05/I.3/FTEK/II/2014 pada tanggal 26 Februari 2014, spesifikasi skripsi ini adalah sebagai berikut:
1. Teknik kendali pengiriman data bersifat repeater dari media transmisi Wifi menjadi media transmisi infra merah .
2. Robot dapat dikendalikan dengan komputer dan mobile smart phone. 3. Robot dapat dikendalikan dari jarak 10 sampai 15 meter.
4. Robot dapat melakukan 67 perintah yang terdapat di remote asli WowWee. 5. Robot dapat melakukan gerakan – gerakan yang sudah diprogram.
4
Sistematika Penulisan I.4.
Sistematika penulisan yang digunakan pada skripsi ini terdiri dari lima bab, berikut adalah penjelasan dari kelima bab tersebut.
BAB I Pendahuluan
Bab ini menjelaskan tujuan dan latar belakang permasalah yang mendasari pembuatan skripsi, spesifikasi alat yang akan direalisasikan dan sistematika penulisan skripsi.
BAB II Dasar Teori
Bab ini berisi tentang pembahasan beberapa dasar teori yang mendukung pembuatan skripsi. Teori yang dibahas adalah Remote Inframerah sebagai media pengirim data pada robot WowWee Robosapien, Metode pengiriman data robot WowWee Robosapien, Mikrokontroler sebagai repeater sistem kendali dan pembangkit frekuensi infra merah, Modul Wi-Fi USR-WIFI232-G sebagai access point antara pengendali dengan mikrokontroler.
BAB III Perancangan Sistem
Bab ini berisi tentang penjelasan perancangan sistem, penjelasan perancangan mikrokontroler sebagai media repeater dari media transmisi Wifi menjadi media Inframerah, Modul USR-WIFI232-G sebagai access point pengiriman dan penerima data dari komputer atau mobile smart phone beserta penggabungannya menjadi sebuah sistem.
BAB IV Pengujian dan Analisis
Bab ini menjelaskan tentang pengujian modul USR-WIFI232-G dan pengujian infra merah sebagai satu rangkaian sistem repeater. Pengujian dilakukan dilakukan bertahap yaitu pengujian modul USR-WIFI232-G dengan serial, pengujian modul dengan kendali komputer, dan pengujian modul dengan kendali smart phone, serta pengujian keseluruhan sistem yaitu ketepatan akurasi data dan jarak pada masing – masing jenis kendali.
BAB V Penutup