INSTITUT TEKNOLOGI PADANG
http://ejournal.itp.ac.id/index.php/tmesin/ e-ISSN: 2598-8263
Vol. 10, No. 2, October 2020 p-ISSN: 2089-4880
Published by Lembaga Penelitian dan Pengabdian Masyarakat (LP2M) - ITP
Analisis Kinematika dan Singularitas Manipulator Paralel Bidang
2 DOF dengan Rantai Kinematik Paralelogram Simetris
Kinematics and Singularity Analysis of 2 DOF Planar Parallel Manipulators
with Symmetrical Parallelogram Chains
Adriyan
Program Studi Teknik Mesin, Sekolah Tinggi Teknologi Nasional Jambi Jl. Kapten Patimura No. 100, Kel. Rawasari, Kec. Alam Barajo, Jambi, Indonesia
doi.10.21063/JTM.2020.v10.i2.79-87
Correspondence should be addressed to [email protected]
Copyright © 2020 Adriyan. This is an open access article distributed under the CC BY-NC-SA 4.0.
Article Information
Abstract
Submitted : 19 September 2020 Accepted : 16 October 2020 Published : 31 October 2020This paper presented the kinematic and singularity analysis of two degree of freedom planar parallel manipulator or 2DOF PPM, in short, with symmetrical parallelogram chains. There were two configurations of 2DOF PPM that analyzed in this paper, that were 2-ΠΠΠ and 2-ΠΠ. Both PPM were represented on a topology diagram using graphs, respectively. Before conducting a kinematic analysis, 2-ΠΠΠ dan 2-ΠΠ were simplified to an equivalent kinematic chain, which was a well-known 5R kinematic chain. Then, the closed-form solutions for the inverse kinematic and the direct kinematic of the PPM were obtained by using the equivalent kinematic chain. Afterward, the velocity analysis was carried out to acquire Jacobians of the PPM. Hence, the singularity analysis can be performed to investigate singularity conditions that existed on the manipulator using these Jacobians. The singularity analysis showed that three singularity conditions existed on the manipulator, i.e. inverse, direct, and combined kinematic singularity. An insightful schematic was provided to illustrate each singularity condition. Keywords: Planar parallel manipulators, parallelogram chains, kinematic analysis, singularity analysis.
1.
Pendahuluan
Manipulator paralel bidang 2 derajat kebebasan (planar parallel manipulators with 2 degree of freedom atau disingkat 2-DOF PPM) cukup banyak dibahas dalam berbagai riset dan juga telah diterapkan dalam beberapa bidang. Manipulator 2 DOF PPM yang dibahas dalam tulisan ini merupakan manipulator yang memiliki dua derajat kebebasan translasi di bidang. Untuk mencapai tujuan tersebut berbagai rantai kinematik telah diajukan.
Rantai kinematik 5R (RRRRR) dengan dua aktuator rotari merupakan rantai kinematik yang cukup ekstensif ditelaah untuk 2 DOF
PPM, baik sambungan aktifnya berada pada satu sumbu [1]–[4] atau terpisah satu sama lain pada jarak tertentu [5]–[7]. Akan tetapi untuk penggunaannya, manipulator ini menemui kendala karena outputnya hanya berupa titik sehingga tidak dapat memposisikan suatu perangkat dalam kedua arah translasi di bidang dengan orientasi tetap. Untuk itu, rantai kinematik lainnya digunakan yaitu berupa pemanfaatan mekanisme paralelogram bidang dengan seluruh sambungan adalah sambungan revolut yang kemudian disimbolkan dengan Π.
Penggunaan mekanisme paralelogram bidang seperti mekanisme 3-parallelogram tunggal
ΠΠΠ, yang diajukan oleh Liu, dkk telah diterapkan untuk proses pengecatan mobil pada industri otomotif [8]. Dalam konstruksinya, dua buah Π disambungkan dengan menggunakan batang ternari yang salah satu sudutnya 90°. Selanjutnya, Huang, dkk menggunakan mekanisme 2-paralelogram simetris, 2-ΠΠ, untuk mengatasi kendala demikian yang diaplikasikan pada proses pick and place [9].
Untuk rantai kinematik dengan
menggunakan sambungan universal (U) dan sambungan sferis (S) yang biasa ditemui pada mekanisme ruang juga telah diajukan oleh beberapa peneliti, seperti Par2 dan IRSBOT-2. Par2 dari LIRMM merupakan manipulator simetris dengan menggunakan kombinasi rantai kinematik yang diaktuasi, 2-RΠS, dan tidak diaktuasi, 2-RΠS, untuk menghasilkan mobilitas tersebut proses pick and place [10]. ΠS digunakan untuk menyimbolkan jenis
paralelogram dengan seluruh sambungan berupa sambungan sferis. IRSBOT-2 dari IRCCyN merupakan 2 DOF PPM dengan rantai kinematik 2-Π(2-UU) yang memiliki kelebihan dalam bobot bergerak dan kekakuan dibandingkan dengan Par2 [11].
Sementara itu, untuk 2 DOF PPM dengan jenis sambungan aktif yang digerakkan dengan aktuator linier juga telah dikaji secara komprehensif. Konstruksi rantai kinematik yang paling mendasar adalah PRRRP dengan kondisi kedua sambungan aktifnya yang segaris
[12], sejajar [13], atau tegak lurus. Persoalan terkait pemosisian perangkat untuk bergerak translasi di bidang juga dialami oleh manipulator dengan rantai kinematik jenis ini. Untuk itu, rantai kinematik paralelogram bidang masih tetap dimanfaatkan untuk mengatasi permasalahan ini.
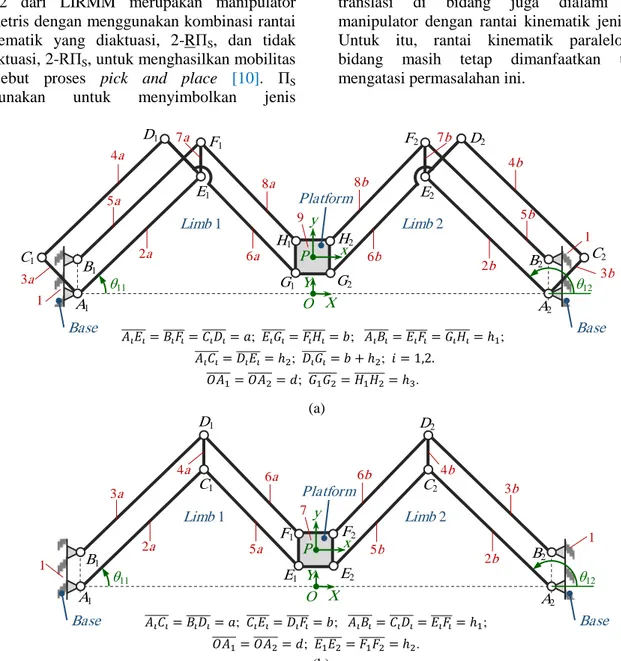
Gambar 1. Manipulator parallel (a) 2-ΠΠΠ dan (b) 2-ΠΠ. Penelitian yang disajikan dalam tulisan artikel
ini mengkaji analisis kinematik dan singularitas manipulator paralalel bidang yang menggunakan rantai kinematik parallelogram simetris. Untuk itu dua buah rantai kinematik
yaitu 2-ΠΠΠ dan 2-ΠΠ digunakan untuk dianalisis. Konfigurasi geometrik dari manipulator ini akan ditampilkan dan kemudian direpresentasikan ke dalam diagram topologi. Sebuah rantai kinematik ekivalen akan dibuat
x A1 B1 C1 D1 E1 F1 H1 G1 A2 B2 C2 D2 E2 F2 H2 G2 𝐴𝑖𝐸𝑖 = 𝐵 = 𝐶𝑖𝐹𝑖 = 𝑎𝑖𝐷𝑖 ; 𝐸 = 𝐹𝑖𝐺𝑖 = 𝑏𝑖𝐻𝑖 ; 𝐴 = 𝐸𝑖𝐵𝑖 = 𝐺𝑖𝐹𝑖 = ℎ𝑖𝐻𝑖 1; 𝐴𝑖𝐶𝑖 = 𝐷 = ℎ𝑖𝐸𝑖 2; 𝐷 = 𝑏 + ℎ𝑖𝐺𝑖 2; 𝑖 = 1,2. 𝑂𝐴1 = 𝑂𝐴 = 𝑑2 ; 𝐺 = 𝐻1𝐺2 = ℎ1𝐻2 3. θ11 θ12 y P Limb 1 Limb 2 Platform Base Base 2a 3a 4a 5a 1 6a 8a 7a 9 8b 6b 7b 2b 4b 5b 3b 1 Y X O (a) x A1 B1 C1 D1 F1 E1 A2 B2 C2 D2 F2 E2 𝐴𝑖𝐶𝑖 = 𝐵 = 𝑎𝑖𝐷𝑖 ; 𝐶𝑖𝐸𝑖 = 𝐷 = 𝑏𝑖𝐹𝑖 ; = 𝐶𝐴𝑖𝐵𝑖 = 𝐸𝑖𝐷𝑖 = ℎ𝑖𝐹𝑖 1; 𝑂𝐴1 = 𝑂𝐴 = 𝑑2 ; 𝐸 = 𝐹1𝐸2 = ℎ1𝐹2 2. θ11 θ12 y P Limb 1 Limb 2 Platform Base Base 2a 3a 1 5a 6a 4a 7 6b 5b 4b 2b 3b Y X O (b) 1
sebagai penyederhanaan kedua rantai kinematik yang dibahas. Dengan demikian, analisis kinematik dan analisis singularitas dilakukan berdasarkan rantai kinematik ekivalen ini.
2.
Metode
Manipulator paralel menggunakan rantai paralelogram simetris yaitu 2-ΠΠΠ dan 2-ΠΠ yang dibahas dalam tulisan ini memiliki konfigurasi rantai kinematik seperti yang ditunjukkan dalam Gambar 1. Manipulator paralel bidang 2-ΠΠΠ pada Gambar 1 sedikit berbeda dengan konstruksi yang telah disintesis oleh Kang, dkk [14]. Parameter geometri kedua manipulator ini juga diberikan dalam Gambar 1 berikut dengan sistem kerangka acuan tetap XOY di base dan kerangka acuan bergerak xPy di platform manipulator.
Selanjutnya, manipulator 2-ΠΠΠ masing-masing limb-nya terdiri atas 7 batang ditambah satu base serta satu platform sehingga terdapat 16 batang. Sementara itu, jumlah sambungan revolut (R) yang digunakan pada manipulator ini adalah sebanyak 22 buah yang sejajar satu sama lainnya. Untuk manipulator 2-ΠΠ, setiap limb-nya disusun oleh 5 batang ditambah dengan satu base serta satu platform sehingga ada sejumlah 12 batang. Selanjutnya, untuk menghubungkan batang-batang ini ada sejumlah 16 sambungan revolut (R) yang digunakan.
Pada tahap awal, konfigurasi geometri kedua manipulator yang ditunjukkan oleh Gambar 1 ditransfer ke dalam diagram topologi. Diagram topologi ini dibuat dengan menggunakan graf
dengan setiap nodal pada graf
merepresentasikan batang-batang pada kedua manipulator.
Selanjutnya, analisis kinematik dilakukan dengan membuat rantai kinematik ekivalen untuk kedua manipulator. Analsis kinematik yang akan dibahas adalah analisis kinematik invers (invers kinematic) dan kinematika langsung (direct kinematic), serta analisis kecepatan. Analisis kinematika langsung dilakukan dengan menggunakan metode eliminasi dialitik Sylvester untuk memperoleh jawab tertutupnya (closed form solutions). Berdasarkan analisis kecepatan akan diperoleh Jacobian dari manipulator ini yang kemudian dapat digunakan untuk melakukan analisis singularitas dari manipulator ini.
3.
Hasil dan Pembahasan
A.Diagram Topologi dan Mobilitas Manipulator Paralel 2-ΠΠΠ
Geometri manipulator 2-ΠΠΠ dan yang ditunjukkan oleh Gambar 1 (a) dan (b) dapat direpresentasikan ke dalam diagram topologi dengan menggunakan graf. Diagram topologi manipulator 2-ΠΠΠ ini diperlihatkan pada Gambar 2. Base manipulator atau batang tetap (fixed link) dinyatakan dengan angka 1, sedangkan seluruh batang apung (floating link) dinyatakan dengan angka 2 s/d 9 di setiap nodal grafnya. Notasi a dan b setelah angka pada batang apung digunakan untuk menyatakan masing-masingnya limb pertama dan limb kedua.
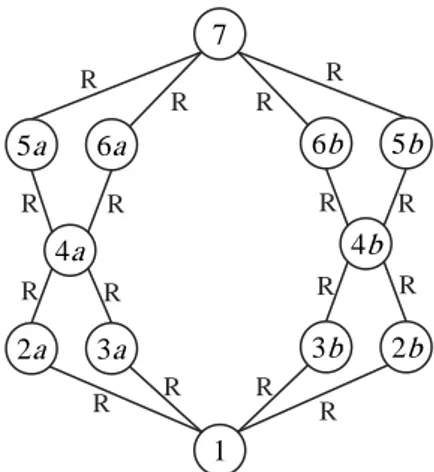
Gambar 2. Diagram topologi manipulator paralel 2-ΠΠΠ menggunakan graf dengan setiap nodal graf merupakan nomor batang yang diindikasikan pada Gambar 1 (a).
Selanjutnya, untuk diagram topologi manipulator 2-ΠΠ ditunjukkan oleh Gambar 3. Nodal 1 dan 7 masing-masingnya menunjukkan base dan platform manipulator. Nodal 2a s/d 5a dan 2b s/d 5b merupakan representasi masing-masing dari batang apung pada limb pertama dan limb kedua.
Gambar 3. Diagram topologi manipulator paralel 2-ΠΠ menggunakan graf dengan setiap nodal graf merupakan nomor batang yang diindikasikan pada Gambar 1 (b).
1 9 2a 3a 5a 4a 6a 7a 8a 2b 3b 5b 4b 6b 7b 8b R R R R R R R R R R R R R R R R R R R R R R 1 7 2a 3a 4a 5a 6a 2b 3b 4b 5b 6b R R R R R R R R R R R R R R R R
Sebagaimana yang telah dinyatakan pada bagian 2 dan juga ditunjukkan oleh diagram topologi bahwa manipulator 2-ΠΠΠ dikonstruksi oleh 16 buah batang dan 22 buah sambungan revolut. Sementara itu, manipulator
2-ΠΠ disusun oleh 12 buah batang dan 16 buah sambungan dengan jenis revolut. Penerapan formulasi Grübler-Kutzbach menghasilkan mobilitas manipulator ini sebesar 1.
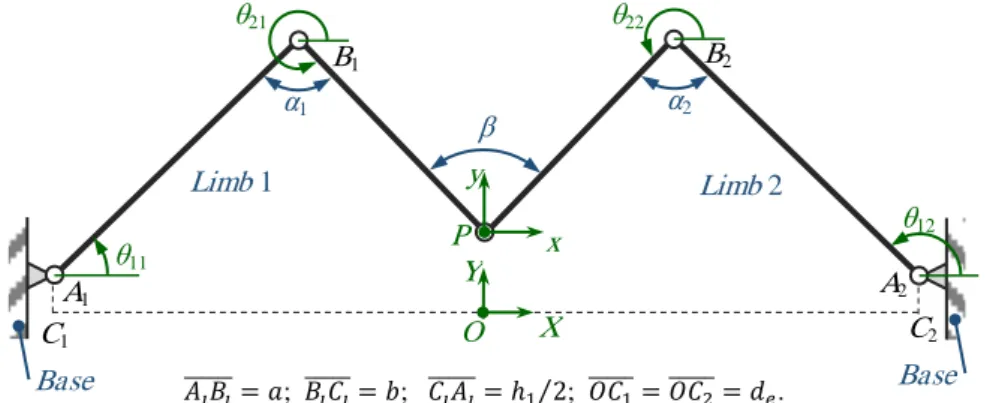
Gambar 4. Rantai kinematik ekivalen manipulator parallel 2-ΠΠΠ dan 2-ΠΠ, dengan = ℎ3⁄2 untuk 2-ΠΠΠ dan = ℎ2⁄2 untuk 2-ΠΠ.
Akan tetapi, kedua manipulator memiliki mobilitas sebesar 2. Hal ini disebabkan oleh penggunaan rantai paralelogram yang menjadikan manipulator mengalami kondisi overconstrained. Perbedaan nilai mobilitas yang diperoleh melalui formulasi Grübler-Kutzbach terhadapa nilai mobilitas sesungguhnya yang dimiliki oleh manipulator
itu sendiri menunjukkan derajat
overconstrained manipulator yang dikaji.
B. Kinematika Invers Manipulator Paralel 2-ΠΠΠ dan 2-ΠΠ
Ekivalensi dari kedua rantai kinematik pada manipulator paralel 2-ΠΠΠ dan 2-ΠΠ ditunjukkan pada Gambar 4. Melalui ekivalensi rantai kinematik ini, sumbu revolut di A1 dan A2 digerakkan melalui aktuator jenis rotari. Dengan demikian, sambungan revolut di B1 dan B2 merupakan sambungan pasif. Dua kerangka acuan pada rantai ekivalen seperti halnya rantai asalnya masih tetap dinyatakan sesuai dengan penempatannya. Berdasarkan Gambar 4 dapat diketahui bahwa ada tiga parameter kinematik yang menyusun rantai kinematik ini yaitu , , dan . Pemilihan suatu nilai tertentu pada ketiga parameter kinematik inilah yang akan mempengaruhi performa manipulator bidang ini. Untuk manipulator bidang yang dibahas ini ketiga parameter kinematik yang disebutkan haruslah bilangan bulat besar dari nol.
Penyelesaian persoalan kinematika invers adalah dengan diketahuinya nilai (dalam hal ini posisi) di platform space, tentukanlah besarnya nilai gerakan aktuator di actutor space. Untuk manipulator yang dibahas ini actuator space adalah 11 dan 12, serta platform space-nya
adalah dan . Mengacu pada konfigurasi geometri rantai ekivalen yang ditunjukkan oleh Gambar 4 dapat dituliskan hubungan loop vektornya sebagai
⃗⃗⃗⃗⃗ = ⃗⃗⃗⃗⃗⃗⃗ + ⃗⃗⃗⃗⃗⃗⃗⃗ + ⃗⃗⃗⃗⃗⃗ , (1) untuk i = 1; 2, dengan ⃗⃗⃗⃗⃗ = ( ) merupakan vektor posisi titik P terhadap titik O. ⃗⃗⃗⃗⃗⃗⃗ menyatakan vektor posisi titik Ai relatif
terhadap titik O, dengan
⃗⃗⃗⃗⃗⃗⃗ = (( 1) ℎ1⁄ )2 .
⃗⃗⃗⃗⃗⃗⃗⃗ = ( 1 1 ) merupakan vektor posisi
titik Bi relatif terhadap Ai. Kemudian,
⃗⃗⃗⃗⃗⃗ = ( 2 2 ) mendeskripsikan vektor
posisi titik P relatif terhadap titik Bi, dan
= dan = .
Seperti yang diketahui bahwa sudut 2
merupakan sambungan pasif, maka sambungan pasif ini dapat dieliminasi dari persamaan loop vektor tentunya. Kemudian, persamaan (1) dapat ditulis kembali dalam bentuk
⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗ = ⃗⃗⃗⃗⃗⃗ , (2) untuk i = 1; 2, dengan melakukan operasi scalar product di kedua ruas persamaan (2) dengan dirinya sendiri diperoleh
( 1 )2+ ( 1 1 )2= 2, (3) untuk i = 1; 2, dengan 1= + , 2= , dan 1= ℎ1⁄2. x C1 B1 C2 A2 B2 𝐴𝑖𝐵𝑖 = 𝑎; 𝐵 = 𝑏𝑖𝐶𝑖 ; = ℎ𝐶𝑖𝐴𝑖 1⁄2; 𝑂𝐶 = 𝑂𝐶1 = 𝑑2 𝑒. θ11 θ12 y P Limb 1 Limb 2 Base Base Y X O A1 θ21 θ22 α1 α2 β
Selanjutnya, persamaan (3) dapat ditulis ulang ke dalam bentuk
1 + 1 1 = , (4)
untuk i = 1; 2, dengan
=
2 .
Penggunaan tangent of half angles, yaitu
1 = ; 1 = ; dan = 2 ,
memberikan alternatif matematis lainnya dari persamaan (4) dalam bentuk
( + ) 2 2
1 + ( ) = (5)
untuk i = 1; 2.
Penyelesaian persamaan (5) untuk 1
menghasilkan jawab kinematika invers untuk manipulator yang dikaji, yaitu
1 = 2 1(
√
) (6)
untuk i = 1; 2, dengan κ merupakan indeks cabang (branch index) yang bernilai -1 dan +1. Berdasarkan indeks cabang ini dapat diketahui bahwa jawab kinematika invers manipulator ini dapat direpresentasikan atas empat jenis modus rakitan (assembly mode) yaitu (+, +); (+, -); (-, +); dan (-, -). Dengan arti kata lain bahwa satu pasangan nilai platform space menghasilkan empat pasangan nilai actuator space. Sementara itu, manipulator paralel
bidang 2-ΠΠΠ dan
2-ΠΠ dengan rantai kinematik penyederhanaan yang ditunjukkan oleh Gambar 4 memiliki assembly mode jenis (+, -).
C.Kinematika Langsung Manipulator Paralel 2-ΠΠΠ dan 2-ΠΠ
Penyelesaian permasalahan kinematika lansung (direct kinematic) merupakan kebalikan dari penyelesaian persoalan kinematika invers. Pada kinematika langsung diketahui atau diberikan nilai pada actuator space dan ditentukan nilai platform space nantinya. Untuk itu, persamaan (3) dapat ditulis ulang dalam bentuk
( )2+ ( )2 2= , (7)
untuk i = 1; 2, dengan = ( 1) 1 , dan
=
2 1 .
Persamaan (7) merupakan persamaan kuadratik dengan variabel dependen dan sebagai fungsi dari variabel independen yaitu
11 dan 12. Variabel dependen dan ini yang
akan dicari jawabnya. Metode eliminasi dialitik
Sylvester dapat membantu untuk
menyelesaikan permasalahan ini.
Langkah awal yang dilakukan yaitu dengan mengekspansikan persamaan (7). Kemudian, variabel dependen diasumsikan sebagai suatu konstanta terlebih dahulu. Dengan demikian, paraktis persamaan hanya mengandung variabel dependen saja yang akan diselesaikan dalam bentuk persamaan kuadratik.
Untuk itu, persamaan (7) dituliskan kembali secara matematis sebagai
2 2 1 + 1= , (8a) 2 2 2 + 2= , (8b) dengan 1= 2 2 1 + 12+ 12 2 dan 2= 2 2 2 + 22+ 22 2 . Penyelesaian
persamaan (8a) dan (8b) secara simultan dilaksanakan dengan memperlakukan 2, 1, dan masing-masingnya sebagai satu variabel. Dalam hal ini terlihat bahwa ada tiga variabel yang akan diselesaikan, tetapi persamaan yang dimiliki hanya dua buah.
Untuk mengatasinya, persamaan (8a) dan (8b) dapat dikalikan dengan . Akibatnya, ada empat persamaan yang dimiliki dan juga empat variabel, yaitu 3; 2; 1; dan . Dengan
demikian, keempat persamaan ini dapat dituliskan dalam bentuk matriks, yaitu
[ 1 2 1 1 2 2 1 2 1 1 2 1 1 2 2 2 ] { 3 2 1 } = { }. (9)
Selanjutnya, jawab non-trivial persamaan (9) dapat diperoleh melalui nilai determinan matriks pada persamaan (9) sama dengan nol, yaitu | 1 2 1 1 2 2 1 2 1 1 2 1 1 2 2 2 | =
atau
( 1 2)2+ ( 1+ 2) 1 2 1 22
2 12= ,
atau juga dapat disederhanakan menjadi
2 2+ 1 + = , (10) dengan 2= [( 1 2)2+ ( 1 2)2], 1= ( 1+ 2)[( 1 2)2+ ( 1 2)2] 1= ( 1+ 2) 2, = ( 12 22)2 2( 12+ 22 2 2)( 1 2)2 ( 1 2)4.
Berdasarkan persamaan (10) terlihat bahwa diperoleh sebuah persamaan dalam variabel dependen dalam bentuk persamaan kuadratik dalam variabel independen 11 dan 12 .
Penyelesaian untuk ini adalah
=1
2( 1+ 2) [1 √1 4
( ) ]. (11)
Sementara itu, variabel dependen dapat ditemukan dengan jalan mengurangkan persamaan (8a) dengan (8b) yang menghasilkan
=
2( ) . (12)
Dengan demikian, mengacu pada persamaan (11) dan (12) sebagai jawab kinematika langsung manipulator yang dibahas dapat diketahui bahwa hanya ada dua jawab untuk platform space ( dan ) dengan diketahuinya nilai actuator space ( 11 dan 12). Hal ini
menunjukkan ada dua kemungkinan posisi di platform space untuk satu nilai pasangan actuator space.
D.Analisis Singularitas Manipulator Paralel 2-ΠΠΠ dan 2-ΠΠ
Penentuan singularitas manipulator paralel bidang ini dapat dilakukan dengan menentukan Jacobian dari manipulator ini terlebih dahulu. Penentuan Jacobian manipulator sejalan dengan
analisis kecepatan manipulator yang dapat diperoleh dengan mengambil turunan persamaan (3) terhadap waktu sekali. Secara matematis, kecepatan manipulator bidang ini dapat ditulis dalam bentuk
( 1 ) ̇ + ( 1 1 ) ̇ + [ 1 (
1 ) 1 ( 1 1 )] ̇1 = , (13)
untuk i = 1; 2.
Jika dinyatakan ke dalam bentuk yang lebih kompak persamaan (13) menjadi
̇ = ̇. (14)
Berdasarkan persamaan (14), merupakan Jacobian kinematika invers
= [ 1
2], (15)
dengan = 1 ( 1 1 ) 1 ( 1 )
untuk i = 1; 2. Selanjutnya, menyatakan Jacobian kinematika langsung yang diberikan oleh
= [ 1 11 1 11
2 12 1 12]. (16)
Sementara itu, ̇ = ( ̇11 ̇12) merupakan
vektor kecepatan actuator space dan
̇ = ( ̇ ̇) menyatakan vektor kecepatan di
platform space.
Mengacu pada Jacobian yang diberikan oleh persamaan (15) dan (16) dapat ditentukan singularitas manipulator paralel masing-masingnya berupa singularitas kinematika invers dan singularitas kinematika langsung. Sementara itu, singularitas kombinasi dapat ditentukan dari kondisi bahwa manipulator berada pada kondisi di kedua singularitas yang telah disebutkan.
1) Singularitas Kinematika Invers
Singularitas ini terjadi jika dan hanya jika determinan bernilai nol atau 1 2= . Nilai
determinan ini menuntut penyelesaian untuk nilai 11 dan 12 yang cukup sulit dicari untuk
keseluruhan nilai-nilainya. Pada kondisi singularitas ini manipulator secara fisik ditandai dengan salah satu limb atau kedua limb dalam kondisi melipat atau merentang. Dengan kata lain, sudut antara batang AiBi dan batang BiP di
masing-masing limb dapat bernilai = , atau = 1 untuk i = 1; 2.
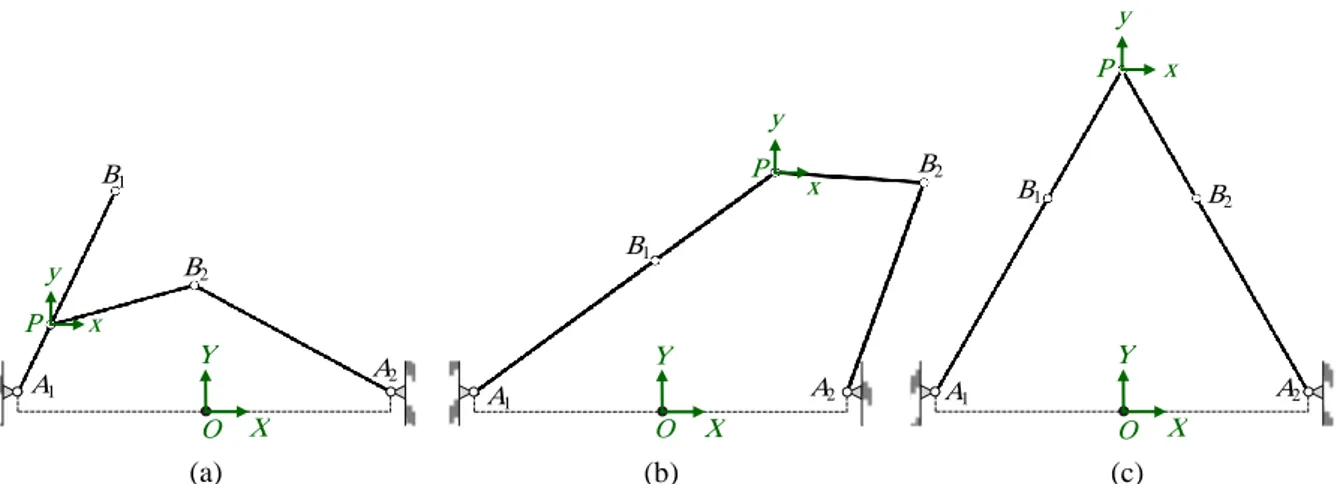
Ada lima pose manipulator dalam kondisi singularitas kinematika invers ini seperti yang ditunjukkan oleh Gambar 5. Melalui Gambar 5 hanya diperlihatkan tiga pose manipulator dalam kondisi singularitas ini. Pose pertama yang ditunjukkan pada Gambar 5 (a) yaitu untuk kondisi hanya batang-batang di limb 1 dalam kondisi melipat 1= . Pose kedua
yaitu pada Gambar 5 (b) memperlihatkan hanya batang-batang di limb 1 dalam kondisi merentang
1= 1 . Selanjutnya, pose ketiga di Gambar
5 (c) mengilustrasikan kondisi kedua batang di kedua limb dalam kondisi saling merentang,
1= 1 dan 2= 1 . Sementara itu, untuk
kedua batang di limb 2 dalam kondisi melipat,
2= , dan kondisi merentang, 2= 1 ,
masing-masingnya merupakan cerminan pose pada Gambar 5 (a) dan (b) terhadap sumbu Y.
Untuk kondisi melipatnya kedua batang pada masing-masing limb di saat bersamaan tidak akan tercapai berdasarkan susunan geometri rantai kinematik yang dimiliki. Kondisi ini hanya dapat terjadi jika = , yang jelas bukan merupakan nilai untuk parameter kinematik pada manipulator yang dibahas dalam artikel ini. Berdasarkan nilai ini, singularitas kinematika invers terjadi di batas workspace manipulator. Ketika manipulator berada dalam kondisi singularitas kinematika invers maka manipulator akan kehilangan satu atau lebih derajat kebebasan yang dimilikinya.
2) Singularitas Kinematika Langsung
Singularitas ini terjadi jika dan hanya jika determinan bernilai nol, | |= . Determinan ini juga perlu diselesaian untuk mendapatkan keseluruhan pasangan nilai 11 dan 12. Secara
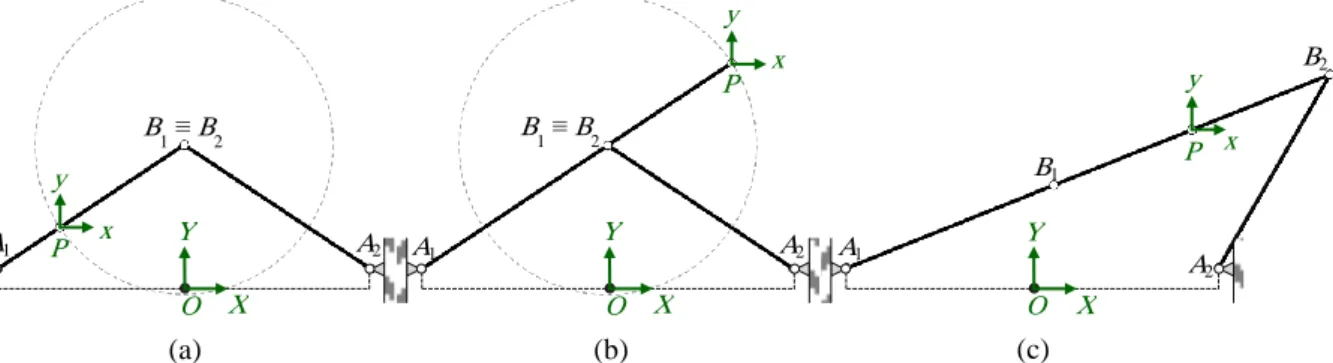
fisik kondisi singularitas kinematika langsung dapat diketahui jika batang kedua pada kedua limb yaitu batang B1P dan batang B2P saling melipat = atau saling merentang = 1 . Jadi, ada dua pose manipulator berada dalam kondisi singularitas kinematika langsung ini seperti yang diperlihatkan dalam Gambar 6.
Untuk kondisi titik B1 dan B2 yang berhimpit ( = ) satu sama lainnya seperti pada Gambar 6 (a) dapat terjadi jika panjang batang AiBi sama atau lebih besar dari panjang
OCi atau . Sementara itu, Gambar 6 (b)
menunjukkan kondisi singularitas ketika batang B1P dan batang B2P dalam keadaan merentang. Dengan kata lain, posisi titik B1 selalu berada pada konsisi diametral opposite dengan titik B2 terhadap titik P.
Berdasarkan kedua pose yang ditunjukkan pada Gambar 6 dapat diketahui bahwa manipulator akan memperoleh satu derajat kebebasan atau lebih untuk manipulator paralel secara umum. Tentunya kondisi ini akan menyulitkan dalam proses pengendalian untuk pemosisian manipulator tentunya. Kemudian, singularitas kinematika langsung dapat terjadi di dalam workspace yang berbeda dengan singularitas kinematika invers yang terjadi di batas workspace.
Gambar 5. Singularitas kinematika invers (a) batang A1B1 dan B1P di limb 1 melipat ( 1= ), (b) batang A1B1 dan B1P di
limb 1 merentang ( 1= 1 ), dan (c) batang AiBi dan BiP di limb 1 dan limb 2 merentang ( 1= 1 , 2= 1 ). B1 B2 A2 P O A1 B1 B2 A2 P O A1 y Y x X B1 B2 A2 P O A1 (a) (b) (c) Y X Y X y x y x
Gambar 6. Singularitas kinematika langsung (a) batang B1P dan B2P melipat ( = ) dengan berimpitnya titik B1 dan B2,
dan (b) batang B1P dan B2P merentang ( = 1 ).
Gambar 7. Singularitas kombinasi (a) batang A1B1 dan B1P di limb 1 melipat ( 1= ) serta batang B1P dan B2P juga
melipat ( = ), (b) batang A1B1 dan B1P di limb 1 merentang ( 1= 1 ) serta batang B1P dan B2P melipat ( = ), dan
(c) batang AiBi dan BiP di limb 1 dan limb 2 merentang ( 1= 1 ) serta batang B1P dan B2P merentang ( = 1 ).
3) Singularitas Kombinasi
Singularitas kombinasi terjadi jika kedua singularitas yaitu singularitas kinematika invers dan singularitas kinematika langsung berlangsung secara bersamaan. Secara matematis ini didefiniskan jika dan hanya jika determinan dan determinan bernilai nol. Secara fisik manipulator ini ditunjukkan jika salah satu limb melipat atau merentang serta diikuti dengan batang B1P dan batang B2P dalam kondisi melipat atau merentang.
Kondisi singularitas kombinasi yang terjadi pada manipulator bidang ini ditunjukkan dalam Gambar 7. Untuk pose pada Gambar 7 (a) dan (b) memperlihatkan kondisi khusus dari kondisi singularitas kinematika langsung Gambar 6 (a) yang berubah menjadi singularitas kombinasi. Kondisi ini hanya terjadi pada empat pose saja yaitu dua pose untuk limb 1 terjadi kolinieritas A1-P-B1-B2 dan A1-B1-B2-P, lihat Gambar 7 (a) dan (b), dan begitu juga untuk limb 2 (kolinieritas A2-P-B2-B1 dan A2-B2-B1-P). Sementara itu untuk pose yang ditunjukkan oleh Gambar 7 (a) memperlihatkan batang A1B1, B1P, dan B2P segaris, 1= 1 dan = 1 .
Hal yang sama juga dapat terjadi ketika batang A2B2, B2P, dan B1P segaris, 2= 1 dan
= 1 .
4.
Simpulan
Telah dilakukan kajian manipulator paralel bidang dua derajat kebebasan translasi dengan menggunakan rantai kinematik 2-ΠΠΠ dan 2-ΠΠ. Kedua jenis manipulator bidang ini direpresentasikan ke dalam suatu diagram topologi dengan menggunakan graf sehingga dapat diketahui topologinya. Untuk proses analisis kinematika dan analisis singularitas, kedua rantai kinematik ini disederhakan menjadi sebuah rantai ekivalen.
Analisis kinematika invers dan analisis kinematika langsung yang telah dilakukan memberikan penyelesaian dalam bentuk jawab tertutup secara analitik (closed-form solutions). Sementara itu, hasil analisis singularitas memperlihatkan ketiga jenis singularitas yaitu singularitas kinematika invers, langsung, dan kombinasinya, ada untuk manipulator bidang ini seperti yang telah diilustrasikan. Kedepannya akan dilakukan optimasi parameter kinematik yang dimiliki oleh manipulator, penyeimbangan mekanisme, analisis dinamik dan perwujudan manipulator bidang ini.
Ucapan Terima Kasih
Penulis mengucapkan terima kasih kepada mitra bebestari yang telah menelaah artikel ini secara blind review.
B1 B2 A2 P O A1 y Y x X (b) (a) B1 ≡ B2 A2 P O A1 Y X y x B1 B2 A2 P O A1 A2 P O A1 y Y x X (a) (c) Y X y x B 1 ≡ B2 A2 P O A1 y Y x X (b) B1 ≡ B2
Referensi
[1] S. Cinquemani, H. Giberti, and M. Bassetti, “Optimal design, simulation and experimental tests of an 5R PKM manipulator,” in IEEE International Conference on Mechatronics (ICM), 2013, pp. 430–435.
[2] M. Isaksson, “A Family of Planar
Parallel Manipulators,” in IEEE International Conference on Robotics and Automation, 2011, pp. 1–10.
[3] A. Joubair, M. Slamani, and I. A. Bonev, “Kinematic calibration of a five-bar planar parallel robot using all working modes,” Robot. Comput. Integr. Manuf., vol. 29, no. 4, pp. 15–25, 2013, doi: 10.1016/j.rcim.2012.10.002.
[4] M. Z. Huang, “Design of a Planar
Parallel Robot for Optimal Workspace and Dexterity,” Int. J. Adv. Robot. Syst., vol. 8, no. 4, pp. 176–183, 2011, doi: 10.5772/45693.
[5] X. Liu, J. Wang, and H. Zheng, “Optimum design of the 5R symmetrical parallel manipulator with a surrounded and good-condition workspace,” Rob. Auton. Syst., vol. 54, pp. 221–233, 2006, doi: 10.1016/j.robot.2005.11.002.
[6] X. Liu, J. Wang, and G. Pritschow, “Performance atlases and optimum design of planar 5R symmetrical parallel mechanisms,” Mech. Mach. Theory, vol. 41, pp. 119–144, 2006, doi: 10.1016/j.mechmachtheory.2005.05.003.
[7] F. A. Lara-Molina, E. H. Koroishi, V. Steffen Jr., and L. A. Martins, “Kinematic performance of planar 5R symmetrical parallel mechanism subjected to clearances and uncertainties,” J. Brazilian Soc. Mech. Sci. Eng., vol. 40, no. 4, pp. 1–15, 2018, doi: 10.1007/s40430-018-1118-4.
[8] X. Liu, J. Li, and Y. Zhou, “Kinematic optimal design of a 2-degree-of-freedom 3-parallelogram planar parallel manipulator,” Mech. Mach. Theory J., vol. 87, pp. 1–17, 2015, doi: 10.1016/j.mechmachtheory.2014.12.014.
[9] T. Huang, S. Liu, J. Mei, and D. G. Chetwynd, “Optimal design of a 2-DOF pick-and-place parallel robot using dynamic performance indices and angular constraints,” Mech. Mach.
Theory, vol. 70, pp. 246–253, 2013, doi: 10.1016/j.mechmachtheory.2013.07.014.
[10] O. Company, F. Pierrot, S. Krut, C. Baradat, and V. Nabat, “Par2: A spatial mechanism for fast planar two-degree-of-freedom pick-and-place applications,” in The Second International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, 2008, pp. 1–10, doi: 10.1007/s11012-010-9413-x.
[11] C. Germain, S. Briot, V. Glazunov, S. Caro, and P. Wenger, “IRSBOT-2: A novel two-DOF parallel robot for high-speed operations,” in Proceedings of the ASME 2011 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, 2011, pp. 1–11, doi: 10.1115/DETC2011-47564.
[12] X. Liu, L. Guan, and J. Wang, “Kinematics and Closed Optimal Design of a Kind of PRRRP Parallel Manipulator,” Mech. Des., vol. 129, no. May, pp. 558–563, 2007, doi: 10.1115/1.2712224.
[13] X. Liu, J. Wang, and G. Pritschow, “Optimal kinematic design of the PRRRP 2-DoF parallel mechanism,” vol. 41, pp. 1111–1130, 2006, doi: 10.1016/j.mechmachtheory.2005.10.008.
[14] L. Kang, J. T. Seo, W. Kim, and B. J. Yi, “Synthesis of new statically balanced parallel mechanisms,” 2014 IEEE Int. Conf. Mechatronics Autom. IEEE ICMA 2014, pp. 1102–1107, 2014, doi: 10.1109/ICMA.2014.6885852.