BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi
Motor induksi merupakan motor arus bolak–balik (AC) yang paling
luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun
rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini
bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi
sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan
putar (rotating magnetic field) yang dihasilkan arus stator [1].
Motor ini memiliki konstruksi yang kuat, sederhana, handal,
serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang
tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak.
Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih
memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor
induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada
motor DC hal yang sama tidak dijumpai [2].
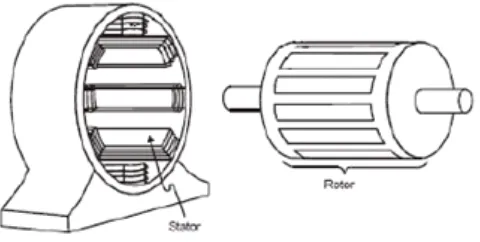
2.2 Konstruksi MotorInduksi
Secara umum, konstruksi dari sebuah motor induksi terdiri dari :
1. Stator adalah bagian dari motor yang diam.
2. Rotor adalah bagian dari motor yang berputar.
Gambar 2.1.Konstruksi stator dan rotor motor induksi.
2.2.1 Stator
Stator merupakan bagian terluar dari motor yang merupakan bagian
yang diam dan mengalirkan arus phasa. Stator terdiri atas tumpukan laminasi
inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang
berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas
(Gambar 2.2.(b)). Tiap elemen laminasi inti dibentuk dari lembaran besi
(Gambar 2.2.(a)). Tiap lembaran besi tersebut memiliki beberapa alur dan
beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar
dalam alur yang disebut belitan phasa dimana untuk motor tiga phasa, belitan
tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang digunakan
terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti
dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)).
Berikut ini merupakan contoh gambar lempengan laminasi inti, lempengan inti
yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar
(a) (b) (c) Gambar 2.2 Komponen stator motor induksi 3 phasa
(a) Lempengan inti,
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya. (c) Tumpukan inti dan kumparan dalam cangkang stator.
Selain itu stator terdiri dari beberapa komponen utama, yaitu :
a) Rangka Stator
Rangka stator merupakan rumah (kerangka) yang menyangga inti
jangkar motor induksi.
b) Inti Stator
Inti stator terbuat dari laminasi-laminasi baja campuran atau
besimagnetik khusus yang terpasang ke rangka stator.
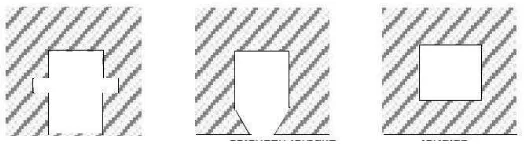
c) Alur (slot) dan Gigi
Alur dan gigi merupakan tempat meletakkan kumparan stator.
Ada3 (tiga) bentuk alur stator yaitu terbuka, setengah terbuka,
dantertutup.
Ketiga bentuk alur (slot) tersebut tampak seperti pada Gambar 2.2
berikut :
d) Kumparan Stator (Kumparan Jangkar)
Kumparan jangkar biasanya terbuat dari tembaga.Kumparan
inimerupakan tempat timbulnya ggl induksi.
2.2.2 Rotor
Rotor merupakan bagian yang bergerak.Berdasarkan jenis rotornya,
motor induksi tiga fasa dapat dibedakan menjadi dua jenis, yang juga akan
menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan
rotor sangkar tupai (squirrel cage rotor).
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang
merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor
fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor
(Gambar 2.3(a)). Belitan-belitan rotor ini kemudian dihubung singkatkan
melalui sikat (brush) yang menempel pada slip ring (perhatikan Gambar 2.3),
dengan menggunakan sebuah perpanjangan kawat untuk tahanan luar [4].
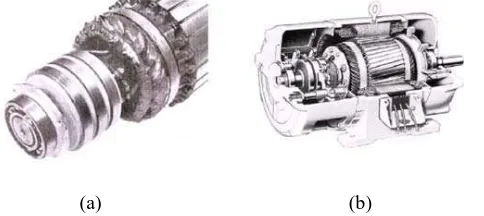
(a) (b)
Gambar 2.3.a) Rotor Belitan . b) Motor Induksi Tiga Fasa Rotor Belitan
disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring.Serta pada Gambar 2.5 merupakan skematik dari motor induksi 3 fasa rotor belitan, dari gambar tersebut terlihat hubungan kumparan rotor.
(a) (b)
Gambar 2.4. a) Rotor Sangkar Tupai, b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
Gambar 2.5.Skematik Diagram Motor Induksi Rotor Belitan
2.3 Prinsip Kerja Motor Induksi
Suatu motor induksi terdiri atas dua bagian utama. Yang pertama
putar dan yang kedua adalah rotor atau bagian berputar, tempat
diinduksikannya ggl oleh maknit putar [5].
Dalam stator dari motor induksi fasa-tiga diletakkan kumparan –
kumparan dari ketiga lilitan fasa secara teratur dengan menempatkan sumbu
masing – masing lilitan berbeda fasa listrik 2�
3 , yang terminalnya dihubungkan
pada jaringan fase-tiga yang simetris, seimbang. Arus dalam ketiga fase itu
bersama – sama akan membangunkan suatu medan yang besarnya tetap dan
berputar dengan kecepatan sudut
�
�=
��2
� , dimana ω sama dengan kecepatan
sudut listrik dari sistem listrik jaringan yang mensuplainya dan P jumlah ktub
dari medan putar stator. Juga ��
60
2
�
, di mana �� adalah putaran permenit darimedan putar stator.
Dengan frekuensi jaringan f periode per detik atau dengan kecepatan sudut
listrik
Dalam medan putar ini terdapat rotor belitan yang lilitannya dihubung singkat.
Oleh medan putar stator akan diinduksikan ggl dalam lilitan rotor yang akan
membangkitkan arus.
Arus rotor bersama dengan medan putar rotor akan membangkitkan
rotor tidak dapat sama dengan kecepatan putaran stator, sebab dalam hal ini
tidak akan ada ggm dan karena itu juga tidak ada yang diinduksikan dalam
rotor, dan kopel akan hilang.
Karena itu untuk bekerjanya motor induksi diperlukan adanya
perbedaan antara putaran rotor dengan putaran medan stator. Jadi perlu adanya
slip.
Jika kecepatan putar rotor adalah n maka definisi slip s adalah
=
��−���
,
��− � adalah selisih antara kecepatan medan putar stator dengan kecepatan
putaran rotor. Frekuensi dari arus induksi dalam rotor adalah
�
2=
�.(��−�)
2.60
=
�.��
120
=
�
.
�
, Juga berlaku �2= sw, ialah frekuensi sudutarus rotor. Arus rotor akan membangunkan pula medan putar yang kecepatan
putarnya terhadap rotor adalah 2.60
�
.
�.(��−�)
2.60
=
�
�− �
dengan kecepatanrotor n maka kecepatan medan putar rotor terhadap stator menjadi �+��−
� = ��. Jadi medan putar rotor mempunyai kecepatan yang sama dengan
medan putar stator.
2.4 Pengereman Motor Listrik
Pengereman adalah suatu kondisi untuk mengurangi kecepatan dari
keadaan running ke suatu keadaan steady state lainnya yang lebih rendah,
dalam hal ini juga termasuk kondisi berhenti. Pada pengereman motor induksi
tiga phasa harus dipilih cara pengereman yang baik, yaitu pengereman tidak
pengereman ditekan sekecil-kecilnya sehingga tidak merusak mesin,serta dapat
dijalankan dan dihentikan sesuai dengan jadwal operasi yang diinginkan [5].
Tujuan pengereman tidak terbatas untuk menghentikan perputaran
mesin secara cepat tetapi juga untuk menjaga agar perputaran mesin tidak
melebihi putaran yang diizinkan. Sehingga dapat disimpulkan, pengereman
merupakan suatu kerja dari gaya yang menghasilkan perlambatan atau
penghentian. Ada beberapa sistem yang digunakan untuk pengereman motor
induksi, diantaranya sistem pengereman mekanis dan sistem pengereman
elektrodinamik.
Pada sistem pengereman elektrodinamik dapat dibedakan atas
beberapa metode antara lain, Pengereman Regeneratif, Pengereman Dinamik,
Pengereman Plugging.
2.4.1 Pengereman Mekanis
Sistem Pengereman Mekanis adalah pengereman yang dilakukan
dengan cara mekanis, yaitu dengan memberikan gesekan pada rotornya dengan
rem dinamo. Pengereman ini menggunakan kopel rem yang bekerja diluar
motor atau biasa disebut dengan metode eksternal. Peralatan pengereman pada
sistem mekanis menggunakan sepatu rem atau drum rem yang terpasang pada
poros rotor. Pada pengereman ini, energi putar dari rotor dikurangi dengan cara
menekan poros rotor menggunakan sepatu rem. Pengereman secara mekanik
menimbulkan rugi-rugi mekanis seperti gesekan yang menimbulkan panas dan
Dengan demikian proses pengereman ini pada dasarnya dilakukan
dengan cara mengubah energi mekanis menjadi energi panas.
2.4.2 Pengereman Secara Elektrodinamik
Pada sistem pengereman ini, torsi pengereman timbul dari dalam
motor itusendiri sebagai akibat kerja elektris dari fluksi medan penguat
sehingga timbul arus rotor yang mengakibatkan terjadinya torsi pengereman,
hal ini disebut juga sistem pengereman dalam. Pengereman secara elektris
lebih halus dibanding pengereman secara mekanis.Pengereman secara listrik
ini digunakan untuk mengatur waktu pengereman, perlambatan dan
sebagainya. Ada tiga metode untuk melakukan pengereman secara
elektrodinamik pada motor induksi tiga phasa, antara lain [5]:
1. Pengereman Regeneratif, dengan cara mengembalikan energi ke
rangkaiansumber/jala-jala
2. Pengereman Plugging, dengan cara membalikkan arah medan motor
tersebut dari arah semula.
3. Pengereman Dinamik, dengan cara meenginjeksikan arus DC ke stator.
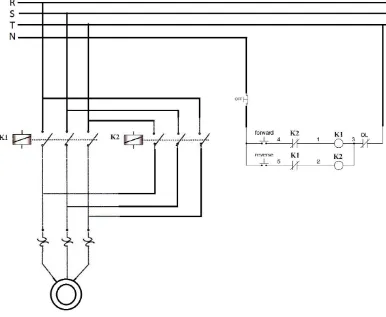
2.4.2.1 Pengereman Regeneratif
Pengereman regereratif terjadi pada saat putaran rotor (nr) lebih
cepatmedan putarnya (ns) sehingga motor akan berfungsi sebagai generator
kecepatan sinkronnya disebabkan adanya gaya luar yang menyebabkan rotor
bergerak harus lebih cepat dari putaran sinkronnya. Hal ini sering dijumpai
pada mesin-mesin pengangkat. Pada waktu menurunkan beban muatan, motor
malahan ditarik oleh beban tersebut sehingga perputaran motor melebihi
putaran sinkronnya, Dengan kondisi demikian, slip motor menjadi negatif,
yang merubah fungsi motor menjadi generator yang mengembalikan energi ke
jala-jala [5].
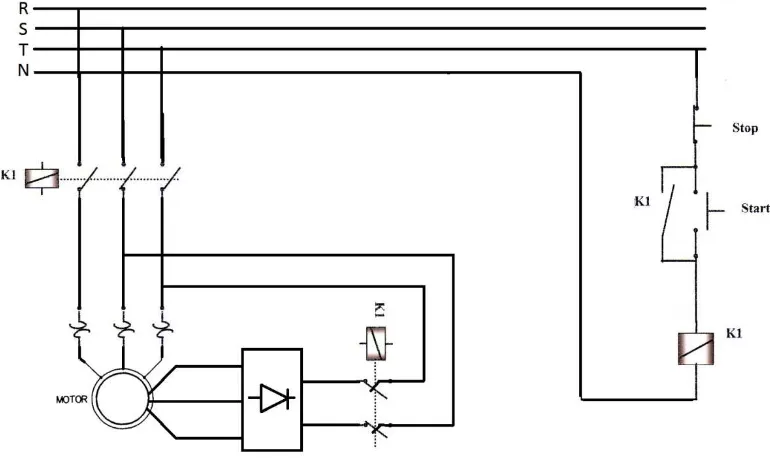
Gambar 2.6 Rangkaian Pengereman Regeneratif Motor Induksi 3 Fasa
Pengereman regeneratif dapat kita jumpai pada motor induksi yang
memiliki dua macam perputaran nominal yang berarti ada dua macam jumlah
kutubnya, yaitu pada saat terjadi perubahan dari perputaran nominal tinggi, ke
2.4.2.2 Pengereman Plugging
Pengereman dengan metode plugging ini dilakukan dengan cara
membalik hubungan phasa dari terminal stator ketika motor berputar. Dengan
membalik hubungan phasa, maka akan timbul suatu fluks yang besarnya
konstan tetapi arahnya berlawanan. Hal ini kan mengakibatkan arus dan
tegangan yang mengalir pada motor makin lama makin kecil dan terjadi
pengereman. Akan tetapi jika pembalikan hubungan phasa terlau lama, akan
mengakibatkan terbaliknya putaran motor [5].
2.4.2.3 Pengereman Dinamik
Sistem pengereman dinamik dengan menggunakan sumber arus
searah, diperoleh apabila sumber jala-jala terlepas dan rangkaian stator motor
dihubungkan ke sumber arus searah yang diperoleh dari rangkaian penyearah
ataupun sumber tegangan DC lainnya, seperti pada Gambar 2.6
Gambar 2.8.Rangkaian Pengereman Dinamik Motor Induksi Tiga Phasa.
(a) Penguatan berasal dari baterai,
(b) Penguatan berasal dari sumber jala-jala yang disearahkan.
Serta nilai tahanan luar rotor dapat dibuah ubah sesuai dengan
kebutuhan pengereman.Aliran arus searah yang mengalir pada belitan stator,
akan dihasilkan tegangan imbas pada arus bolak-balik yang juga akan
menghasilkan medan magnet diam terhadap stator. Interaksi medan magnet
resultan dengan arus imbas rotor akan menghasilkan momen pengereman yang
besarnya tergantung pada besar medan magnet yang dihasilkan medan stator,
resistansi rangkaian rotor (untuk motor induksi rotor belitan) berpengaruh pada
nilai kecepatan torsi pengereman terjadi. Semakin kecil nilai tahanan, semakin
cepat torsi pengereman terjadi, dan kecepatan perputaran rotor [6].
Pengereman dinamik juga dapat dioptimalisasikan dengan
menggunakan rangkaian pengendali. Rangkaian ini yang akan secara otomatis
mengatur besar arus dc yang akan di injeksikan kedalam kumparan stator
motor induksi dan mengatur besar arus output dari rotor yang terlebih dahulu
disearahkan menggunakan penyearah tak terkendali yang kemudian akan di
kontrol menggunakan dc chopper.[6]
Ketika tombol stop ditekan maka secara otomatis terminal motor
dilepas dari supplay ac 3 fasa dan terhubung ke rangkaian pengendali, maka
secara otomatis rangkaian pengendali menyala dan mengalirkan arus DC yang
sudah diatur besar arusnya ke kumparan stator, ketika arus dc dialirkan maka
pada rotor motor induksi tersebut akan timbul arus bolak balik tiga fasa, karena
motor berubah fungsi sementara menjadi generator induksi. Arus bolak balik
tiga fasa dari rotor ini kemudian di searahkan menggunakan penyearah tak
terkendali yang di pararelkan dengan tahanan, serta dc chopper yang akan
mengatur besar tegangan yang akan dialirkan ke tahanan tersebut. Dengan
mengatur nilai arus masukan dan arus keluaran rotor, maka waktu yang
terjadi pada motor dapat berkurang sehingga motor tidak cepat rusak akibat
panas yang timbul dari pengereman.
Untuk membaca kecepatan putaran rotor digunakan rotary encoder
yang akan menjadi referensi besar arus yang dialirkan kedalam stator. Seiring
dengan berkurangnya putaran rotor motor induksi, maka arus dc yang di
alirkan kedalam stator akan dikurangi secara bertahap juga, hingga rotor
berhenti berputar, maka arus dc juga berhenti dialirkan ke kumparan stator.
Diagram blok pada Gambar 2.7 diatas merupakan diagram blok
pengereman motor induksi 3 fasa dengan menggunakan kontroler, dari diagram
diatas, dapat dilihat, arus DC dari penyearah kemudian di atur oleh DC chopper
yang sudut penyalaannya diatur oleh kontroler. Dimana untuk tegangan 1 fasa
dihubungkan dengan kabel salah satu fasa serta dari kabel netral
2.5 Proses Rancang Bangun
Kegiatan ini berguna untuk menentukan komponen yang akan digunakan
dalam rancang bangun ini, agar hasil yang diperoleh dapat lebih maksimal dan
mengurangi kegagalan dalam kegiatan rancang bangun yang akan dilakukan.
Penentuan spesifikasi dari motor induksi yang akan digunakan. Dalam
kasus ini motor yang digunakan memiliki spesifikasi :
o Tegangan : 220/380 V
o Arus : 5,3/3,2 A
o Daya : 1100 W
• Dari sisi penyaluran arus DC ke stator
Maka untuk menghitung besar arus DC yang akan diinjeksikan
kedalam kumparan stator adalah ��� = �3
2���, ��� = � 3
25,3 = 6,49 �.
arus nominal yang digunakan motor adalah 3,2 A maka arus yang dibutuhkan
untuk pengereman dinamik motor induksi adalah kurang dari atau sama dengan
nilai nominal arus motor induksi tersebut.
Maka transformator ,rangkaian penyearah, relay, DC chopper serta kabel –
kabel yang dibutuhkan harus mampu mengalirkan arus sebesar 3 A.
Disini transformator yang digunakan memiliki tegangan dan arus nominal 30 V
dan 5 A.
• Dari sisi output rotor motor induksi
Arus keluaran rotor dibatasi menjadi 3 A untuk mengurangi
pembebanan pada saat motor berubah menjadi generator menggunakan diode
penyearah. Kemudian untuk menentukan besar dari tahanan minimum yang
digunakan adalah � = ���
Selain nilai hambatan diatas, besarnya daya yang diberikan pada resistor juga
harus diperhitungkan dengan rumus �= �2�. Maka � = 32. 0,6 = 5,4 �
sehingga resistor yang dibutuhkan 0,6 Ω 5,4 W.
• Penentuan rangkaian Kontrol
Mikrokontroler yang digunakan adalah atmega8, dengan spesifikasi
tegangan kerja 2,7 V sampai 5 V arus yang nominal yang dibutuhkan 3,6 mA,
karena mikrokontroler tipe ini sudah lebih dari cukup mampu untuk melakukan
Dan untuk mengaktifkan mikrokontroler dibutuhkan tegangan sebesar 5
v yang disupplay oleh regulator 5 V. Ic regulator yang digunakan adalah 7805,
ic ini merupakan regulator tegangan linier yang keluarannya bernilai tetap.
Spesifikasi ic ini, tegangan minimum 7 V, tegangan maksimum 25 V, arus
output dari ic ini dapat mencapai 1 A, sehingga sudah cukup untuk mensupplay
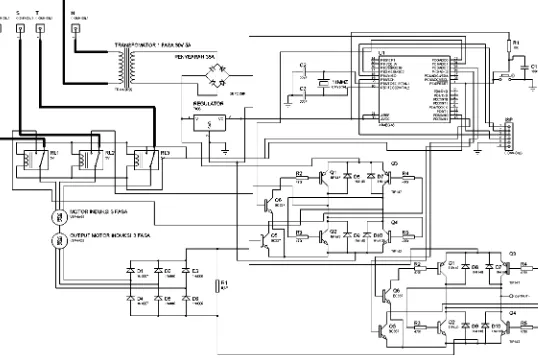
mikrokontroler.Dan untuk rangkaian minimum yang dibutuhkan oleh
mikrokontroler ini bekerja dapat terlihat pada Gambar 2.8 dari gambar tersebut
terlihat hubungan – hubungan antara pengendali serta hubungan – hubungan
dengan motor induksi 3 fasa.
Untuk bekerja pada frekuensi tinggi seperti menghasilkan pulsa PWM
yang akan mengatur keluaran dari DC chopper, mikrokontroler harus diberi
pembangkit pulsa / osilator eksternal sebesar 11 Mhz yang diserikan dengan 2
buah kapasitor non polar sebesar 22pF dan terhubung ke negatif sumber DC.
DC chopper yang digunakan adalah rangkaian transistor TIP 142, TIP
147 dengan rangkaian yang sama dengan rangkaian transistor H-Bridge. Ic ini
mampu mengalirkan tegangan sebesar 100 V dan arus sebesar 10 A.
2.6 Prinsip Kerja Rangkaian Pengendali
Motor induksi 3 fasa rotor belitan dihubungkan ke sumber
tegangan 3 fasa dan dijalankan, kemudian dibiarkan berputar mencapai putaran
nominal. Setelah motor induksi mencapai putaran nominal, maka motor di
matikan dengan melepaskan hubungan terminal motor dari sumber jala – jala.
Kemudian sumber arus searah di supplay oleh relay ke kumparan stator melalui
pertamamengatur besarnya tegangan berdasarkan besar PWM yang berasal dari
alat pengendali mikrokontroler.
Pada saat motor di supplay arus searah dalam keadaan berputar,
maka motor induksi tersebut berubah menjadi generator induksi dan
menghasilkan arus bolak balik pada kumparan rotor. Arus bolak balik 3 fasa
dari rotor ini akan di searahkan menggunakan rangkaian penyearah tak
terkendali yang kemudian besarnya arus DC ini akan diatur besarnya melalui
DC chopper kedua yang di pararelkan dengan tahanan yang besarnya telah
ditentukan.
Kemudian rotary encoder akan mengukur kecepatan putar rotor,
yang akan menjadi referensi bagi mikrokontroler untuk mengurangi besar
tegangan DC yang di alirkan kedalam kumparan stator secara bertahap hingga
mencapai 0V. Kemudian timer akan mengukur lama waktu ketika pengendali
mulai bekerja hingga rotatry encoder menunjukkan bahwa rotor motor tidak
Gambar 2.10Rangkaian Kendali Pengereman Dinamik Motor Induksi 3 Fasa
2.7 Penyearah Penuh Satu Fasa
Penyearah merupakan alat untuk mengubah arus bolak balik
menjadi denyutan arus searah. Jika tegangan bolak balik dikenakan pada
penyearah silikon,seperti pada Gambar 2.9, maka diode secara bergantian
dibias maju dan terbalik selam setiap siklus tegangan yang dikenakan. Jika
diode dibias maju, yaitu selama setengah siklus positif,arus elektron mengalir
Gambar 2.11.Penyearah setengah gelombang; (a) rangkaian; (b) gelombang tegangan
masukan dan keluaran.
Selama setengah siklus berikutnya ketika diode dibias balik, diode
tidak melakukan konduksi.Diode menghantarkan arus hanya selama setengah
siklus positif dari tegangan yang dikenakan,sehingga menghasilkan keluaran dc
berdenyut dengan bentuk gelombang yang ditunjukkan dalam Gambar 2.9-b.
Penyearah yang menghasilkan arus keluaran tipe ini disebut penyearah
setengah gelombang.
Untuk mendapatkan keluaran arus lebih rata, dapat digunakan dua
buah diode dan transformator tap-tengah yang dihubungkan seperti pada
Gambar 2.10 untuk membentuk apa yang dikenal sebagai penyearah
gelombang penuh.Dengan susunan yang demikian, setiap diodeakan
melakukan konduksi selama setengah siklus, sehingga bentuk gelombang arus
keluarannya adalah seperti pada Gambar 2.10-b.
Gambar 2.12Penyearah gelombang penuh dengan transformator tap-tengah; (a) rangkaian; (b)
gelombang tegangan masukan dan keluaran.
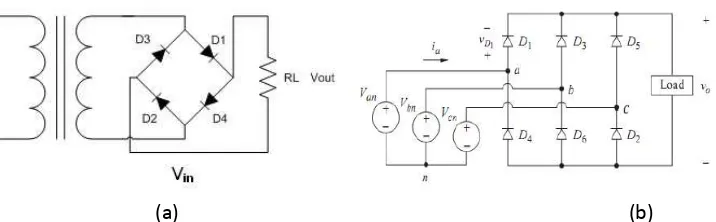
Hubungan penyearah lain yang biasa digunakan, yang disebut
penyearah jembatan gelombang penuh,ditunjukkan dalam Gambar 2.11-a.
Rangkaian penyearah ini menghindarkan penggunaan transformator tap-tengah
dan menghasilkan tegangan keluaran dua kali tegangan yang diperoleh dari
penyearah dara dua diode [7].
Gambar 2.13(a) penyearah jembatan gelombang penuh satu fasa; (b) penyearah jembatan
gelombang penuh tiga fasa
(a) (b)
Untuk menyediakan arus searah yang besar yang kerap kali
diperlukan dalam industri, biasanya digunakan penyearah tiga fasa. Diagram
hubungan penyearah gelombang penuh tipe-jembatan tiga fasa ditunjukkan
dalam Gambar 2.11-b.
Keluaran yang berdenyut yang dihasilkan oleh penyearah, hanya
sesuai untuk beberapa pemakaian.Tetapi dalam banyak hal, denyut tersebut
harus dikurangi dengan menggunakan rangkaian penapis (filter).Rangkaian
penapis ialah gabungan dari kumparan induktansi dan kapasitor yang dirangkai
sedemikian rupa sehingga energi yang berdenyut disimpan secara bergantian
didalam kumparan dan kapasitor, sehingga arus yang mengalir dari penyearah
lebih rata.Dua rangkaian penapis khas ditunjukkan dalam Gambar 2.12.
Gambar 2.14Rangkaian filter yang digunakan untuk mengurangi denyut keluaran penyearah.
Penyearah silikon banyak tersedia di pasaran dengan nilai arus
mulai dari beberapa miliampere sampai beberapa ratus ampere dan dengan
nilai tegangannya sampai 1000 V atau lebih.Penyearah tersebut sangat efisien
dan efisiensi penyearahannya sampai 99 persen. Oleh karena banyak kelebihan
menyalurkan daya yang besar maka penyearah silikon sangat luas digunakan
sebagai catu daya industri untuk pengisian baterai, proses – proses
elektrokimia, pengatur kecepatan motor variabel, dan pemakaian lainnya yang
dulunya menggunakan generator dc.
2.8 Mikrokontroler Atmega8
Atmega8 termasuk mikrokontroler dengan lebar jalur data 8 bit,
hemat energi dan memiliki kinerja tinggi (1 mega instruksi per detik).
Frekuensi kerjanya dapat mencapai 16MHz. Memori untuk menyimpan
program (PEROM) berkapasitas 8 kilobyte.Memori untuk menyimpan data
sementara (SRAM) berkapasitas 1 kilobyte.Adapun memori untuk menyimpan
data permanen (EEPROM) berkapasitas 512 byte.Memori PEROM dapat
dihapus tulis hingga 10.000 kali sedangkan memori EEPROM hingga 100.000
kali [8].
Modul modul internal Atmega8 meliputi: dua buah Timer/Counter
8 bit, satu buah Timer/Counter 16 bit, RTC dengan sumber clock terpisah, 3
channel PWM, 6 channel ADC, sebuah TWI atau I2C, USART, SPI, Watchdog
timer dan analog comparator. Fitur khusus Atmega8 meliputi power on reset,
brown out detector, osilator RC internal, sumber interupsi internal – eksternal
dan lima buah mode sleep. Atmega8 memiliki 23 pin I/O (input-output) yang
dikemas dalam tiga macam bentuk IC yaitu 28 pin PDIP, 32 pin TQFP dan 32
pin QFN/MLF. Kemasan yang paling mudah digunakan adalah model PDIP.
Gambar 2.15Kemasan PDIP Atmega8
Terlihat dalam gambar tersebut bahwa setiap pin I/O dilengkapi
fungsi alternatif. Sebagai contoh, pin 23 berlabelkan PC0(ADC0), selain dapat
difungsikan sebagai pin input – output PC0, juga dapat difungsikan sebagai
channel ADC ke 0. Contoh lain, pin 3 yang berlabelkan TXD(PD1), selain
dapat digunakan sebagai pin input – output PD1, juga dapat digunakan untuk
mengirim data secara serial asinkron melalui modul USART. Fungsi mana
yang akan digunakan oleh sebuah pin I/O dapat dipilih dengan cara mengeset
register – register AVR lewat program yang dibuat. Dan berikut adalah gambar