DAFTAR PUSTAKA
1. Zuhal, “Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Edisi ke-5, Penerbit Gramedia, Jakarta, 1995.
2. W. Agung, Mochammad Facta, M Anantha B.P, “Pengereman Dinamik Pada Motor Induksi Tiga Phasa”,Jurnal Transmisi, Vol II no, 1, hal 15, juni 2006. 3. Djoekardi, Djuhana.,”Mesin-Mesin Listrik Motor Induksi”,Cetakan Pertama,
Penerbit Universitas Trisakti, Jakarta, 1996.
4. Chapman,Stephen J.,”Electric Machinery Fundamentals”, Third Edition, McGraw-Hill International Edition,Singapore,1999.
5. Siskind, Charles S.,”Electrical Machines : direct & alternating current”, Second Edition,McGraw-Hill, New York,1959.
6. R.J. Pradip, G.K. DUBEY, “Optimum DC Dynamic Braking Control of an InductionMotor Using Thyristor Chopper Controlled Resistance”,
International Electrical Engineering Education (IEEE), vol. 21, No. 2, hal 60-65, may 1974.
7. Lister, E.C., “Mesin dan Rangkaian Listrik”, Sixth Edition, McGraw-Hill, Inc., 1984.diterjemahkan oleh : Ir.Drs. Gunawan, H., P.T. Gelora Aksara Pratama, 1993.
8. Nurcahyo,Sidik,”Aplikasi dan Teknik Pemograman Mikrokontroler AVR ATMEL”, Penerbit ANDI,Yogyakarta,2012.
BAB III
METODOLOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
Eksperimen dilakukan di laboratorium Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangunan dan Listrik(P4TK) Medan, di jalan Setiabudi Nomor 75 Kapten Sumarsono Helvetia Medan.
3.2 Bahan dan Perlengkapan Pengujian
1. Bahan Analisa
Bahan yang digunakan dalam analisa ini adalah :
• Data pengukuran tegangan yang dimasukkan kedalam stator motor induksi.
• Data pengukuran tegangan keluaran dari rotor motor induksi. • Data waktu yang dibutuhkan pengereman dinamik motor induksi.
2. Peralatan Pendukung
Peralatan pendukung yang digunakan adalah : • Motor Induksi
• Modul Mikrokontroler dan Laptop • Modul Penyearah
• Pengaman MCB • Sumber tegangan AC 3.3 Prosedur Penelitian
Pengukuran tegangan dan arus yang dibutuhkan untuk melakukan pengereman dinamik motor induksi tiga fasa. Untuk melakukannya dengan cara mengumpulkan data dari template motor induksi tersebut, kemudian dilakukan perhitungan menggunakan rumus yang ada.
Ada beberapa tahap prosedur penelitian seperti yang ditunjukkan pada gambar diagram alur selanjutnya.
• Untuk langkah pertama dilakukan pemasangan semua peralatan termasuk alat-alat ukur sesuai rangkaian percobaan.
• Mengeset variabel dalam mikrokontroler menggunakan laptop yang akan mengatur besar keluaran tegangan DC dari komponen pengendali.
• Selanjutnya motor induksi dijalankan menggunakan sumber tegangan AC 3 fasa.
• Kemudian dicatat waktu yang diperlukan motor untuk berhenti tanpa pengereman.
• Selanjutnya motor induksi dijalankan kembali menggunakan sumber tegangan AC 3 fasa.
• Setelah sumber AC 3 fasa dilepas, maka secara otomatis arus DC disuplay dari rangkaian penyearah yang terkendali kedalam stator. • Maka dari rotor akan menghasilkan tegangan AC dan kemudian
akan dikendalikan besar tegangannya menggunakan rangkaian DC chopper.
• Mikrokontroler akan mencatat kecepatan putar rotor dan secara konstan mengurangi besar tegangan DC yang dimasukkan kedalam kumparan stator..
• Kemudian mikrokontroler akan mencatat waktu yang dibutuhkan motor dari keadaan berputar hingga berhenti.
BAB IV
PENGUJIAN SISTEM DAN ANALISIS DATA
4.1 Metode Pengujian
Dalam bab ini akan dilakukan pengujian terhadap Alat Pengereman Dinamik Motor Induksi 3 Fasa. Pengujian-pengujian pengereman yang dilakukan pada motor induksi oleh alat ini bertujuan untuk mengetahui kinerja dan proses kerja dari bagian – bagian yang diuji serta sistem secara keseluruhan dan apakah telah bekerja dengan baik sesuai dengan yang diharapkan atau tidak dan melihat hasil yang ditimbulkan pada motor induksi 3 fasa tersebut.
4.2 Pengujian Pengereman Dinamik
Gambar 4.2.2Alat kontrol pengereman dinamik terhubung kemotor induksi 3 fasa.
Pengujian dilakukan sebanyak 3 kali untuk pengambilan data pengereman dinamik tanpa kontrol, pengereman plugging, dan pengereman dinamik terkontrol.Bertempat di Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangunan dan Listrik.
Tabel 4.2.1 Perbandingan waktu dan arus pengereman dinamik tanpa kontrol, dinamik terkontrol
dan plugging motor 1,1 Kw
Pengereman
Dinamik
Plugging Tanpa Kontrol Terkontrol
Tegangan Input DC (Volt), (V1) 40 40 -
Waktu Pengereman (Detik) 0,8 0,6 0,25
Arus Input DC (Ampere), (A1) 1,65 2 -
Dari data diatas maka diperoleh waktu pengereman untuk motor induksi 1,1 Kw paling cepat menggunakan pengereman plugging, diikuti dengan pengereman dinamik terkontrol kemudian pengereman dinamik tanpa kontrol. Namun pengereman plugging menghasilkan arus yang sangat besar melebihi arus start dari motor itu sendiri sehingga sangat berbahaya bagi motor itu sendiri jika pengereman plugging digunakan terus menerus.Namun karena masih banyak terdapat noise pada rangkaian minimum system maka terkadang pada saat pengujian dapat terjadi error dalam menjalankan program yang telah dibuat.Dimana atmega menjalankan perintah yang tidak seharusnya dijalankan.
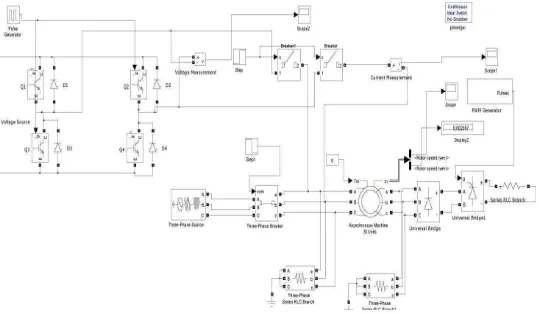
Gambar 4.2.1.1.1 Rangkaian Simulasi Menggunakan Matlab Pengereman Dinamik Motor Induksi
4.2.1 Simulasi Pengereman Motor Induksi 3 Fasa 2,2 Kw
Simulasi pertama ini untuk mengetahui waktu yang dibutuhkan oleh motor induksi untuk berhenti dengan menggunakan 3 metode pengereman yang berbeda serta arus yang dibutuhkan dalam pengereman tersebut.
Gambar 4.2.1.1 (a)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
detik
Putaran Rotor (RPM) 1910
1432
955
477
0
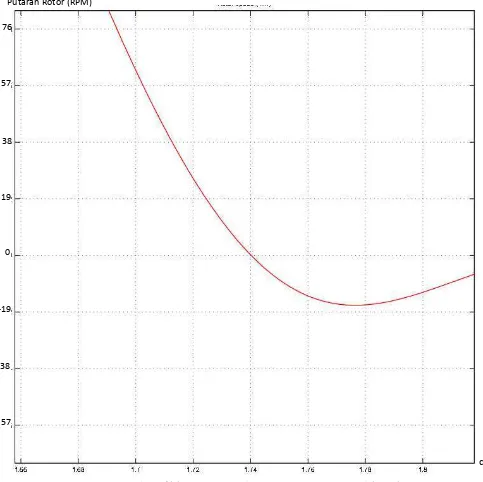
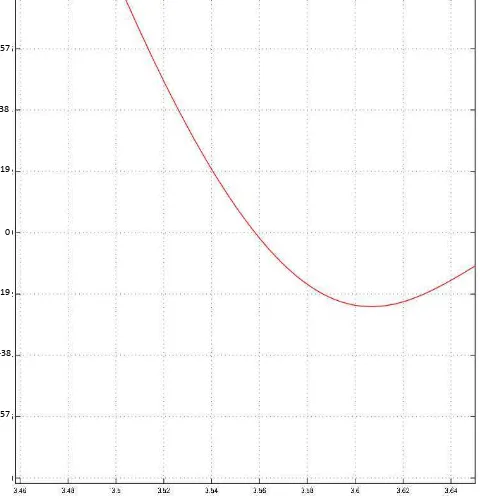
Gambar 4.2.1.1 (b)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
induksi 2,2 Kw
Putaran Rotor (RPM)
detik
76
57
38
19
0
-19
-38
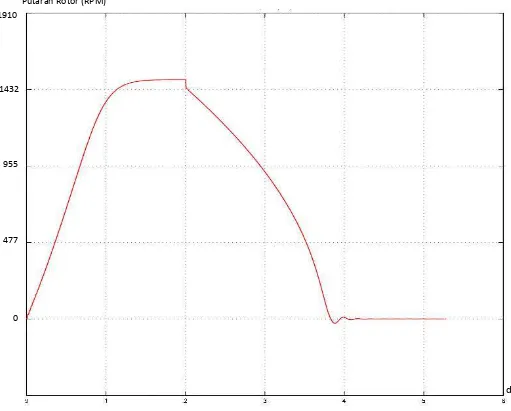
Gambar 4.2.1.2 (a)Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol
motor induksi 2,2 Kw
Pada grafik diatas, Gambar 4.2.1.2 (a) setelah simulasi berjalan, maka motor induksi juga berputar selama 1 detik, kemudian kontaktor akan bekerja
Putaran Rotor (RPM)
detik
1910
1432
955
477
0
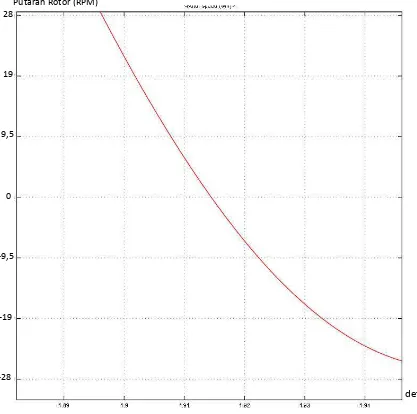
dengan memutus sumber 3 fasa dari motor induksi kemudian mengalirkan arus DC ke kumparan stator dan kumparan rotor dihubung singkat. Grafik diatas menunjukkan waktu yang dibutuhkan rotor dari berputar hingga berhenti.Untuk melihat lebih tepatnya rotor berhenti, dapat dilihat pada grafik dibawah ini Gambar 4.2.1.2 (b). Pada saat motor dalam proses pengereman, tegangan DC yang diterapkan sebesar 40 V serta arus DC yang mengalir ke kumparan stator sebesar 2,59 A.
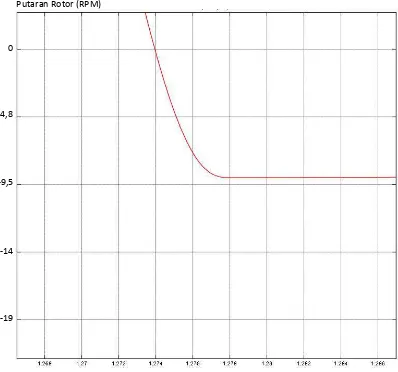
Gambar 4.2.1.2 (b)Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol detik
Putaran Rotor (RPM) 28
19
9,5
0
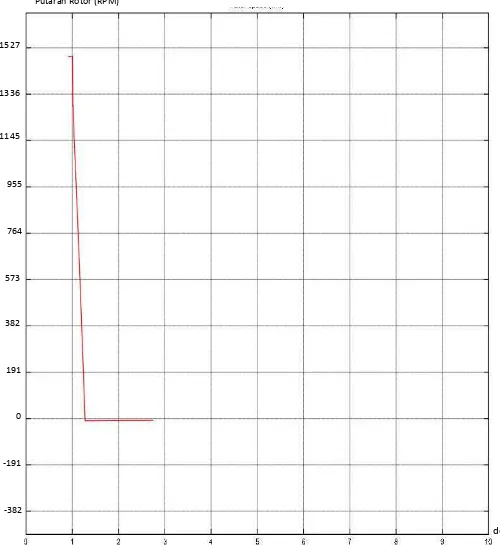
Gambar 4.2.1.3 Grafik pengereman plugging motor induksi 2,2 Kw
Putaran Rotor (RPM)
detik
1527
1336
1145
955
764
573
382
191
0
Pada grafik diatas, Gambar 4.2.1.3 (a) setelah simulasi berjalan, maka motor induksi juga berputar selama 1 detik, kemudian kontaktor akan bekerja dengan memutus sumber 3 fasa dari motor induksi kemudian mengalirkan arus AC dengan fasa yang sudah dibalik ke kumparan stator dan kumparan rotor dihubung singkat. Grafik diatas menunjukkan waktu yang dibutuhkan rotor dari berputar hingga berhenti.Untuk melihat lebih tepatnya rotor berhenti, dapat dilihat pada grafik dibawah ini Gambar 4.2.1.3 (b). Waktu yang dibutuhkan untuk rotor motor berhenti sangat cepat, karena arus yang mengalir sangat besar pada kumparan rotor.
Putaran Rotor (RPM)
detik
0
-4,8
-9,5
-14
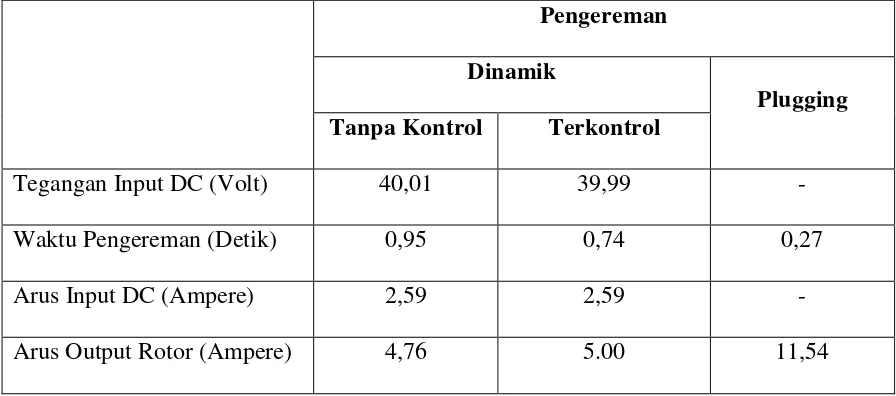
Tabel 4.2.1.1 Perbandingan waktu dan arus pengereman dinamik tanpa kontrol, dinamik terkontrol
dan plugging motor 2,2 Kw
Pengereman
Dinamik
Plugging
Tanpa Kontrol Terkontrol
Tegangan Input DC (Volt) 40,01 39,99 -
Waktu Pengereman (Detik) 0,95 0,74 0,27
Arus Input DC (Ampere) 2,59 2,59 -
Arus Output Rotor (Ampere) 4,76 5.00 11,54
4.2.2 Simulasi Pengereman Motor Induksi 3 Fasa 5,5 Kw
Simulasi kedua ini untuk mengetahui waktu yang dibutuhkan oleh motor induksi yang mempunyai daya yang lebih besar untuk berhenti dengan menggunakan 3 metode pengereman yang berbeda serta arus yang dibutuhkan dalam pengereman tersebut.
Gambar 4.2.2.1(a)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
induksi 5,5 Kw
Putaran Rotor (RPM)
detik
1910
1432
955
477
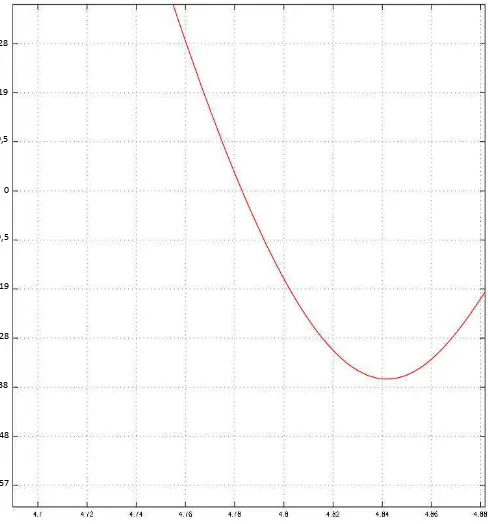
Gambar 4.2.2.1(b)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
induksi 5,5 Kw
Putaran Rotor (RPM)
detik
57
38
19
0
Gambar 4.2.2.2(a)Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol
motor induksi 5,5 Kw
Putaran Rotor (RPM)
detik
1337
1146
955
764
573
382
191
0
Gambar 4.2.2.2(b)Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol motor
induksi 5,5 Kw
Putaran Rotor (RPM)
detik
28
19
9,5
0
-9,5
-19
-28
-38
Gambar 4.2.2.3(a)Grafik pengereman plugging motor induksi 5,5 Kw
Pada grafik diatas, Gambar 4.2.2.3 (a) setelah simulasi berjalan, maka
Putaran Rotor (RPM)
detik
1910
1432
955
477
0
AC dengan fasa yang sudah dibalik ke kumparan stator dan kumparan rotor dihubung singkat. Grafik diatas menunjukkan waktu yang dibutuhkan rotor dari berputar hingga berhenti.Untuk melihat lebih tepatnya rotor berhenti, dapat dilihat pada grafik dibawah ini Gambar 4.2.2.3 (b). Waktu yang dibutuhkan untuk rotor motor berhenti sangat cepat, karena arus yang mengalir sangat besar pada kumparan rotor.
Gambar 4.2.2.3 (b)Grafik pengereman plugging motor induksi 5,5 Kw
Putaran Rotor (RPM)
detik
0
-9,5
-19
-28,5
-38
Tabel 4.2.2.1 Perbandingan waktu dan arus pengereman dinamik tanpa kontrol, dinamik terkontrol
dan plugging motor 5,5 Kw
Pengereman
Dinamik
Plugging
Tanpa Kontrol Terkontrol
Tegangan Input DC (Volt) 39.87 39,99 -
Waktu Pengereman(Detik) 2,707 1,83 2.09
Arus Input DC (Ampere) 5.67 5.57 -
Arus Output Rotor (Ampere) 6,25 7.76 12,4
4.2.3 Simulasi Pengereman Motor Induksi 3 Fasa 11 Kw
Simulasi yang ketiga ini untuk mengetahui waktu yang dibutuhkan oleh motor induksi yang mempunyai daya yang lebih besar untuk berhenti dengan menggunakan 3 metode pengereman yang berbeda serta arus yang dibutuhkan dalam pengereman tersebut.
Gambar 4.2.3.1(a)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
induksi 11 Kw
detik
Putaran Rotor (RPM) 1910
1432
955
477
0
Gambar 4.2.3.1 (b)Grafik kecepatan putar dengan pengereman motor induksi terkontrol motor
induksi 11 Kw
Putaran Rotor (RPM)
detik
4,75
3,8
2,85
1,9
0,95
-4,75 0
-0,95
-1,9
-2,85
Gambar 4.2.3.2 (a) Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol
motor induksi 11 Kw
detik
Putaran Rotor (RPM) 1330
1140
955
760
570
380
190
0
Gambar 4.2.3.2(b)Grafik kecepatan putar dengan pengereman motor induksi tak terkontrol motor
induksi 11 Kw
Putaran Rotor (RPM)
detik
95
47,5
0
-47,5
Gambar 4.2.3.3(a)Grafik pengereman plugging motor induksi 11 Kw
Pada grafik diatas, Gambar 4.2.3.3 (a) setelah simulasi berjalan, maka motor induksi juga berputar selama 3 detik, kemudian kontaktor akan bekerja
detik
1520
1330
1140
955
760
570
380
190
0
-190
dengan memutus sumber 3 fasa dari motor induksi kemudian mengalirkan arus AC dengan fasa yang sudah dibalik ke kumparan stator dan kumparan rotor dihubung singkat. Grafik diatas menunjukkan waktu yang dibutuhkan rotor dari berputar hingga berhenti.Untuk melihat lebih tepatnya rotor berhenti, dapat dilihat pada grafik dibawah ini Gambar 4.2.3.3 (b). Waktu yang dibutuhkan untuk rotor motor berhenti sangat cepat, karena arus yang mengalir sangat besar pada kumparan rotor.
Gambar 4.2.3.3(b)Grafik pengereman plugging motor induksi 11 Kw
Tabel 4.2.3.1 Perbandingan waktu dan arus pengereman dinamik tanpa kontrol, dinamik terkontrol
dan plugging motor 11 Kw
Pengereman
Dinamik
Plugging
Tanpa Kontrol Terkontrol
Tegangan Input DC (Volt) 39,59 39,51 -
Waktu Pengereman (Detik) 2,56 1,29 5,90
Arus Input DC (Ampere) 10,6 10,79 -
Arus Output Rotor (Ampere) 11,79 11,52 13,38
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan pembahasan pada bab – bab sebelumnya maka dapat diambil kesimpulan sebagai berikut:
1. Alat yang dirancang merupakan sebuah prototipe yang dapat melakukan pengereman dinamik motor induksi 3 fasa dan mengontrol keluaran dan masukan dalam proses pengereman tersebut dan dapat melakukan pengerman dinamik dengan lebih efisien.
2. Semakin besar tegangan DC yang di terapkan ke dalam kumparan stator maka arus yang mengalir juga semakin besar, hal ini akan meningkatkan torsi pengereman dinamik.
5.2 Saran
Untuk meningkatkan kinerja dari alat ini maka dapat dilakukan beberapa peningkatan berupa :
1. Ditambahkan daya motor yang akan diuji, sehingga kehandalan alat tersebut dapat ditingkatkan.
2. Alat dapat digunakan untuk melakukan dengan metode pengereman yang lain, seperti pengereman regenerative, pengereman plugging, atau mengontrol pengereman dengan menggunakan sepatu rem.
BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi
Motor induksi merupakan motor arus bolak–balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator [1].
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai [2].
2.2 Konstruksi MotorInduksi
Secara umum, konstruksi dari sebuah motor induksi terdiri dari : 1. Stator adalah bagian dari motor yang diam.
Gambar 2.1.Konstruksi stator dan rotor motor induksi.
2.2.1 Stator
(a) (b) (c) Gambar 2.2 Komponen stator motor induksi 3 phasa
(a) Lempengan inti,
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya. (c) Tumpukan inti dan kumparan dalam cangkang stator.
Selain itu stator terdiri dari beberapa komponen utama, yaitu : a) Rangka Stator
Rangka stator merupakan rumah (kerangka) yang menyangga inti jangkar motor induksi.
b) Inti Stator
Inti stator terbuat dari laminasi-laminasi baja campuran atau besimagnetik khusus yang terpasang ke rangka stator.
c) Alur (slot) dan Gigi
Alur dan gigi merupakan tempat meletakkan kumparan stator. Ada3 (tiga) bentuk alur stator yaitu terbuka, setengah terbuka, dantertutup.
d) Kumparan Stator (Kumparan Jangkar)
Kumparan jangkar biasanya terbuat dari tembaga.Kumparan inimerupakan tempat timbulnya ggl induksi.
2.2.2 Rotor
Rotor merupakan bagian yang bergerak.Berdasarkan jenis rotornya, motor induksi tiga fasa dapat dibedakan menjadi dua jenis, yang juga akan menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel cage rotor).
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor (Gambar 2.3(a)). Belitan-belitan rotor ini kemudian dihubung singkatkan melalui sikat (brush) yang menempel pada slip ring (perhatikan Gambar 2.3), dengan menggunakan sebuah perpanjangan kawat untuk tahanan luar [4].
(a) (b)
Gambar 2.3.a) Rotor Belitan . b) Motor Induksi Tiga Fasa Rotor Belitan
disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring.Serta pada Gambar 2.5 merupakan skematik dari motor induksi 3 fasa rotor belitan, dari gambar tersebut terlihat hubungan kumparan rotor.
(a) (b)
Gambar 2.4. a) Rotor Sangkar Tupai, b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
Gambar 2.5.Skematik Diagram Motor Induksi Rotor Belitan
2.3 Prinsip Kerja Motor Induksi
putar dan yang kedua adalah rotor atau bagian berputar, tempat diinduksikannya ggl oleh maknit putar [5].
Dalam stator dari motor induksi fasa-tiga diletakkan kumparan – kumparan dari ketiga lilitan fasa secara teratur dengan menempatkan sumbu masing – masing lilitan berbeda fasa listrik 2�
3 , yang terminalnya dihubungkan
pada jaringan fase-tiga yang simetris, seimbang. Arus dalam ketiga fase itu bersama – sama akan membangunkan suatu medan yang besarnya tetap dan berputar dengan kecepatan sudut
�
�=
��2
� , dimana ω sama dengan kecepatan
sudut listrik dari sistem listrik jaringan yang mensuplainya dan P jumlah ktub dari medan putar stator. Juga ��
60
2
�
, di mana �� adalah putaran permenit darimedan putar stator.
Dengan frekuensi jaringan f periode per detik atau dengan kecepatan sudut listrik
Dalam medan putar ini terdapat rotor belitan yang lilitannya dihubung singkat. Oleh medan putar stator akan diinduksikan ggl dalam lilitan rotor yang akan membangkitkan arus.
rotor tidak dapat sama dengan kecepatan putaran stator, sebab dalam hal ini tidak akan ada ggm dan karena itu juga tidak ada yang diinduksikan dalam rotor, dan kopel akan hilang.
Karena itu untuk bekerjanya motor induksi diperlukan adanya perbedaan antara putaran rotor dengan putaran medan stator. Jadi perlu adanya slip.
Jika kecepatan putar rotor adalah n maka definisi slip s adalah
=
��−���
,
��− � adalah selisih antara kecepatan medan putar stator dengan kecepatan
putaran rotor. Frekuensi dari arus induksi dalam rotor adalah
�
2=
�.(��−�)
2.60
=
�.��
120
=
�
.
�
, Juga berlaku �2= sw, ialah frekuensi sudutarus rotor. Arus rotor akan membangunkan pula medan putar yang kecepatan putarnya terhadap rotor adalah 2.60
�
.
�.(��−�)
2.60
=
�
�− �
dengan kecepatanrotor n maka kecepatan medan putar rotor terhadap stator menjadi �+��−
� =��. Jadi medan putar rotor mempunyai kecepatan yang sama dengan medan putar stator.
2.4 Pengereman Motor Listrik
pengereman ditekan sekecil-kecilnya sehingga tidak merusak mesin,serta dapat dijalankan dan dihentikan sesuai dengan jadwal operasi yang diinginkan [5].
Tujuan pengereman tidak terbatas untuk menghentikan perputaran mesin secara cepat tetapi juga untuk menjaga agar perputaran mesin tidak melebihi putaran yang diizinkan. Sehingga dapat disimpulkan, pengereman merupakan suatu kerja dari gaya yang menghasilkan perlambatan atau penghentian. Ada beberapa sistem yang digunakan untuk pengereman motor induksi, diantaranya sistem pengereman mekanis dan sistem pengereman elektrodinamik.
Pada sistem pengereman elektrodinamik dapat dibedakan atas beberapa metode antara lain, Pengereman Regeneratif, Pengereman Dinamik, Pengereman Plugging.
2.4.1 Pengereman Mekanis
Dengan demikian proses pengereman ini pada dasarnya dilakukan dengan cara mengubah energi mekanis menjadi energi panas.
2.4.2 Pengereman Secara Elektrodinamik
Pada sistem pengereman ini, torsi pengereman timbul dari dalam motor itusendiri sebagai akibat kerja elektris dari fluksi medan penguat sehingga timbul arus rotor yang mengakibatkan terjadinya torsi pengereman, hal ini disebut juga sistem pengereman dalam. Pengereman secara elektris lebih halus dibanding pengereman secara mekanis.Pengereman secara listrik ini digunakan untuk mengatur waktu pengereman, perlambatan dan sebagainya. Ada tiga metode untuk melakukan pengereman secara elektrodinamik pada motor induksi tiga phasa, antara lain [5]:
1. Pengereman Regeneratif, dengan cara mengembalikan energi ke rangkaiansumber/jala-jala
2. Pengereman Plugging, dengan cara membalikkan arah medan motor tersebut dari arah semula.
3. Pengereman Dinamik, dengan cara meenginjeksikan arus DC ke stator.
2.4.2.1 Pengereman Regeneratif
kecepatan sinkronnya disebabkan adanya gaya luar yang menyebabkan rotor bergerak harus lebih cepat dari putaran sinkronnya. Hal ini sering dijumpai pada mesin-mesin pengangkat. Pada waktu menurunkan beban muatan, motor malahan ditarik oleh beban tersebut sehingga perputaran motor melebihi putaran sinkronnya, Dengan kondisi demikian, slip motor menjadi negatif, yang merubah fungsi motor menjadi generator yang mengembalikan energi ke jala-jala [5].
Gambar 2.6 Rangkaian Pengereman Regeneratif Motor Induksi 3 Fasa
2.4.2.2 Pengereman Plugging
Pengereman dengan metode plugging ini dilakukan dengan cara membalik hubungan phasa dari terminal stator ketika motor berputar. Dengan membalik hubungan phasa, maka akan timbul suatu fluks yang besarnya konstan tetapi arahnya berlawanan. Hal ini kan mengakibatkan arus dan tegangan yang mengalir pada motor makin lama makin kecil dan terjadi pengereman. Akan tetapi jika pembalikan hubungan phasa terlau lama, akan mengakibatkan terbaliknya putaran motor [5].
2.4.2.3 Pengereman Dinamik
Sistem pengereman dinamik dengan menggunakan sumber arus searah, diperoleh apabila sumber jala-jala terlepas dan rangkaian stator motor dihubungkan ke sumber arus searah yang diperoleh dari rangkaian penyearah ataupun sumber tegangan DC lainnya, seperti pada Gambar 2.6
Gambar 2.8.Rangkaian Pengereman Dinamik Motor Induksi Tiga Phasa.
(a) Penguatan berasal dari baterai,
(b) Penguatan berasal dari sumber jala-jala yang disearahkan.
akan dihasilkan tegangan imbas pada arus bolak-balik yang juga akan menghasilkan medan magnet diam terhadap stator. Interaksi medan magnet resultan dengan arus imbas rotor akan menghasilkan momen pengereman yang besarnya tergantung pada besar medan magnet yang dihasilkan medan stator, resistansi rangkaian rotor (untuk motor induksi rotor belitan) berpengaruh pada nilai kecepatan torsi pengereman terjadi. Semakin kecil nilai tahanan, semakin cepat torsi pengereman terjadi, dan kecepatan perputaran rotor [6].
Pengereman dinamik juga dapat dioptimalisasikan dengan menggunakan rangkaian pengendali. Rangkaian ini yang akan secara otomatis mengatur besar arus dc yang akan di injeksikan kedalam kumparan stator motor induksi dan mengatur besar arus output dari rotor yang terlebih dahulu disearahkan menggunakan penyearah tak terkendali yang kemudian akan di kontrol menggunakan dc chopper.[6]
terjadi pada motor dapat berkurang sehingga motor tidak cepat rusak akibat panas yang timbul dari pengereman.
Untuk membaca kecepatan putaran rotor digunakan rotary encoder
yang akan menjadi referensi besar arus yang dialirkan kedalam stator. Seiring dengan berkurangnya putaran rotor motor induksi, maka arus dc yang di alirkan kedalam stator akan dikurangi secara bertahap juga, hingga rotor berhenti berputar, maka arus dc juga berhenti dialirkan ke kumparan stator.
Diagram blok pada Gambar 2.7 diatas merupakan diagram blok pengereman motor induksi 3 fasa dengan menggunakan kontroler, dari diagram diatas, dapat dilihat, arus DC dari penyearah kemudian di atur oleh DC chopper
yang sudut penyalaannya diatur oleh kontroler. Dimana untuk tegangan 1 fasa dihubungkan dengan kabel salah satu fasa serta dari kabel netral
2.5 Proses Rancang Bangun
Kegiatan ini berguna untuk menentukan komponen yang akan digunakan dalam rancang bangun ini, agar hasil yang diperoleh dapat lebih maksimal dan mengurangi kegagalan dalam kegiatan rancang bangun yang akan dilakukan.
Penentuan spesifikasi dari motor induksi yang akan digunakan. Dalam kasus ini motor yang digunakan memiliki spesifikasi :
o Tegangan : 220/380 V o Arus : 5,3/3,2 A
o Daya : 1100 W
• Dari sisi penyaluran arus DC ke stator
Maka untuk menghitung besar arus DC yang akan diinjeksikan
kedalam kumparan stator adalah ��� = �3
2���, ��� = � 3
arus nominal yang digunakan motor adalah 3,2 A maka arus yang dibutuhkan untuk pengereman dinamik motor induksi adalah kurang dari atau sama dengan nilai nominal arus motor induksi tersebut.
Maka transformator ,rangkaian penyearah, relay, DC chopper serta kabel – kabel yang dibutuhkan harus mampu mengalirkan arus sebesar 3 A.
Disini transformator yang digunakan memiliki tegangan dan arus nominal 30 V dan 5 A.
• Dari sisi output rotor motor induksi
Arus keluaran rotor dibatasi menjadi 3 A untuk mengurangi pembebanan pada saat motor berubah menjadi generator menggunakan diode penyearah. Kemudian untuk menentukan besar dari tahanan minimum yang digunakan adalah � = ���
Selain nilai hambatan diatas, besarnya daya yang diberikan pada resistor juga harus diperhitungkan dengan rumus �= �2�. Maka � = 32. 0,6 = 5,4 �
sehingga resistor yang dibutuhkan 0,6 Ω 5,4 W. • Penentuan rangkaian Kontrol
Dan untuk mengaktifkan mikrokontroler dibutuhkan tegangan sebesar 5 v yang disupplay oleh regulator 5 V. Ic regulator yang digunakan adalah 7805, ic ini merupakan regulator tegangan linier yang keluarannya bernilai tetap. Spesifikasi ic ini, tegangan minimum 7 V, tegangan maksimum 25 V, arus output dari ic ini dapat mencapai 1 A, sehingga sudah cukup untuk mensupplay mikrokontroler.Dan untuk rangkaian minimum yang dibutuhkan oleh mikrokontroler ini bekerja dapat terlihat pada Gambar 2.8 dari gambar tersebut terlihat hubungan – hubungan antara pengendali serta hubungan – hubungan dengan motor induksi 3 fasa.
Untuk bekerja pada frekuensi tinggi seperti menghasilkan pulsa PWM yang akan mengatur keluaran dari DC chopper, mikrokontroler harus diberi pembangkit pulsa / osilator eksternal sebesar 11 Mhz yang diserikan dengan 2 buah kapasitor non polar sebesar 22pF dan terhubung ke negatif sumber DC.
DC chopper yang digunakan adalah rangkaian transistor TIP 142, TIP 147 dengan rangkaian yang sama dengan rangkaian transistor H-Bridge. Ic ini mampu mengalirkan tegangan sebesar 100 V dan arus sebesar 10 A.
2.6 Prinsip Kerja Rangkaian Pengendali
pertamamengatur besarnya tegangan berdasarkan besar PWM yang berasal dari alat pengendali mikrokontroler.
Pada saat motor di supplay arus searah dalam keadaan berputar, maka motor induksi tersebut berubah menjadi generator induksi dan menghasilkan arus bolak balik pada kumparan rotor. Arus bolak balik 3 fasa dari rotor ini akan di searahkan menggunakan rangkaian penyearah tak terkendali yang kemudian besarnya arus DC ini akan diatur besarnya melalui DC chopper kedua yang di pararelkan dengan tahanan yang besarnya telah ditentukan.
Gambar 2.10Rangkaian Kendali Pengereman Dinamik Motor Induksi 3 Fasa
2.7 Penyearah Penuh Satu Fasa
Penyearah merupakan alat untuk mengubah arus bolak balik menjadi denyutan arus searah. Jika tegangan bolak balik dikenakan pada penyearah silikon,seperti pada Gambar 2.9, maka diode secara bergantian dibias maju dan terbalik selam setiap siklus tegangan yang dikenakan. Jika
Gambar 2.11.Penyearah setengah gelombang; (a) rangkaian; (b) gelombang tegangan
masukan dan keluaran.
Selama setengah siklus berikutnya ketika diode dibias balik, diode
tidak melakukan konduksi.Diode menghantarkan arus hanya selama setengah siklus positif dari tegangan yang dikenakan,sehingga menghasilkan keluaran dc berdenyut dengan bentuk gelombang yang ditunjukkan dalam Gambar 2.9-b. Penyearah yang menghasilkan arus keluaran tipe ini disebut penyearah setengah gelombang.
Untuk mendapatkan keluaran arus lebih rata, dapat digunakan dua buah diode dan transformator tap-tengah yang dihubungkan seperti pada Gambar 2.10 untuk membentuk apa yang dikenal sebagai penyearah gelombang penuh.Dengan susunan yang demikian, setiap diodeakan melakukan konduksi selama setengah siklus, sehingga bentuk gelombang arus keluarannya adalah seperti pada Gambar 2.10-b.
Gambar 2.12Penyearah gelombang penuh dengan transformator tap-tengah; (a) rangkaian; (b)
gelombang tegangan masukan dan keluaran.
Hubungan penyearah lain yang biasa digunakan, yang disebut penyearah jembatan gelombang penuh,ditunjukkan dalam Gambar 2.11-a. Rangkaian penyearah ini menghindarkan penggunaan transformator tap-tengah dan menghasilkan tegangan keluaran dua kali tegangan yang diperoleh dari penyearah dara dua diode [7].
Gambar 2.13(a) penyearah jembatan gelombang penuh satu fasa; (b) penyearah jembatan
gelombang penuh tiga fasa
(a) (b)
Untuk menyediakan arus searah yang besar yang kerap kali diperlukan dalam industri, biasanya digunakan penyearah tiga fasa. Diagram hubungan penyearah gelombang penuh tipe-jembatan tiga fasa ditunjukkan dalam Gambar 2.11-b.
Keluaran yang berdenyut yang dihasilkan oleh penyearah, hanya sesuai untuk beberapa pemakaian.Tetapi dalam banyak hal, denyut tersebut harus dikurangi dengan menggunakan rangkaian penapis (filter).Rangkaian penapis ialah gabungan dari kumparan induktansi dan kapasitor yang dirangkai sedemikian rupa sehingga energi yang berdenyut disimpan secara bergantian didalam kumparan dan kapasitor, sehingga arus yang mengalir dari penyearah lebih rata.Dua rangkaian penapis khas ditunjukkan dalam Gambar 2.12.
Gambar 2.14Rangkaian filter yang digunakan untuk mengurangi denyut keluaran penyearah.
menyalurkan daya yang besar maka penyearah silikon sangat luas digunakan sebagai catu daya industri untuk pengisian baterai, proses – proses elektrokimia, pengatur kecepatan motor variabel, dan pemakaian lainnya yang dulunya menggunakan generator dc.
2.8 Mikrokontroler Atmega8
Atmega8 termasuk mikrokontroler dengan lebar jalur data 8 bit, hemat energi dan memiliki kinerja tinggi (1 mega instruksi per detik). Frekuensi kerjanya dapat mencapai 16MHz. Memori untuk menyimpan program (PEROM) berkapasitas 8 kilobyte.Memori untuk menyimpan data sementara (SRAM) berkapasitas 1 kilobyte.Adapun memori untuk menyimpan data permanen (EEPROM) berkapasitas 512 byte.Memori PEROM dapat dihapus tulis hingga 10.000 kali sedangkan memori EEPROM hingga 100.000 kali [8].
Gambar 2.15Kemasan PDIP Atmega8
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor induksi sudah tidak asing lagi bagi masyarakat umum dan motor induksi tiga fasa banyak digunakan oleh dunia industri karena memiliki beberapa keuntungan. Keuntungan yang dapat diperleh dalam pengendalian motor-motor induksi tiga fasa yaitu, struktur motor induksi tiga fasa lebih ringan,dibandingkan dengan motor arus searah DC untuk daya yang sama, harga satuan relatif lebih murah, dan perawatan motor induksi tiga fasa lebih hemat, maka dari itu motor induksi tiga fasa lebih mudah ditemukan dipasaran dibandingkan motor lainnya.
Pengereman yang digunakan sekarang pada motor induksi tiga fasa, secara umum masih menggunakan metoda yang sederhana, dengan cara pengereman mekanik dimana torsi pengereman dihasilkan peralatan yang berupa sepatu rem dan drum yang terpasang pada poros rotor. Pada pengereman ini energi putar dari rotor dikurangi dengan cara menekan poros rotor menggunakan sepatu rem. Serta pengereman secara elektrik tanpa kendali secara otomatis.
Jika supplay ac tiga fasa dari motor induksi yang sedang berjalan dilepas, dan pada kumparan stator diinjeksikan arus DC, maka mesin induksi tersebut berubah menjadi generator. Energi mekanik sisa yang terdapat pada motor yang berasal dari beban aktif, maupun energi kinetik putar rotor diubah menjadi energi listirk dan di disipasikan pada rangkaian tahanan rotor. Dengan mengontrol tegangan keluaran rotor menggunakan tambahan resistor dan DC chopper maka akan diperoleh efisiensi yang lebih baik lagi dalam hal pengereman dinamik motor induksi. Metode pengereman dinamik terkontrol ini dapat meningkatkan optimalisasi dari pengereman dinamik itu sendiri. Dan memberikan kemudahan dalam hal pengaturan kecepatan kecepatan pengereman terhadap motor induksi tiga fasa.
1.2 Perumusan Masalah
Adapun rumusan masalah dari tugas akhir ini adalah :
• Bagaimana pengontrolan pengereman dinamik dari kondisi motor berputar hingga berhenti.
• Bagaimana hubungan besar tegangan DC yang di terapkan dan besar tegangan DC dari konverter output motor terhadap waktu pengereman.
1.3 Batasan Masalah
Agar tujuan penulisan sesuai dengan yang diharapkan serta terfokus pada judul dan bidang yang telah disebutkan diatas, maka penulis membatasi permasalahan yang akan dibahas sebagai berikut. :
• Hanya menganalisis pengontrolan tegangan masukan DC ke stator dan tegangan AC keluaran dari motor induksi tiga fasa • Penelitian dilakukan pada laboratorium Pusat Penngembangan
dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangunan dan Listrik (P4TK)
• Motor induksi yang diteliti adalah motor induksi tiga fasa di laboratorium (P4TK Medan) dan memiliki daya 1 KW.
• Motor induksi yang digunakan merupakan motor induksi 3 fasa rotor belitan.
• Tidak membahas starting pada motor induksi.
• Tidak membahas rugi – rugi pada pengereman dinamik. • Tidak membahas gangguan yang terjadi pada motor induksi.
• Pengendali menggunakan mikrokontroler dari Atmel tipe Atmega8.
• Sensor kecepatan menggunakan rotary encoder
1.4. Tujuan Penelitian
Adapun tujuan penulisan ini adalah sebagai berikut :
• Mengetahui bagaimana pengontrolan pengereman dinamik motor induksi.
• Mengetahui hubungan besar tegangan DC yang diinjeksikan dan besar tegangan DC dari konverter output motor terhadap waktu pengereman.
• Menganalisis data hasil proses pengereman dinamik terkontrol motor induksi tiga fasa.
• Merancang dan membangun rangkaian pengendali pengereman motor induksi 3 fasa
1.5 Manfaat Penelitian
Adapun manfaat penelitian ini adalah untuk memberikan pengereman yang efisien dan terkendali untuk menghentikan putaran motor induksi menggunakan pengereman secara elektrik.
1.6 Metodologi Penelitian
1. Studi Literatur
Mengambil bahan dari buku – buku referensi, jurnal, koran, media elektronik (internet) dan sebagainya.
2. Studi Lapangan
Menganalisis dan menguji coba alat yang akan digunakan pada motor induksi yang dilakukan pada laboratorium (P4TK Medan). 3. Studi Bimbingan
Diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Jurusan Teknik Elektro USU, mengenai masalah – masalah yang timbul selama penulisan Tugas Akhir ini berlangsung.
1.7 Sistematika Penulisan
Penulisan Tugas Akhir ini Ditulis dan disusun dalam urutan sebagai berikut :
BAB I. PENDAHLUAN
BAB II. TINJAUAN PUSTAKA
Bab ini membahas secara umum teori dasar motor induksi dan pengendalinya, dan metode analisis pengukuran besar arus DC yang diinjeksikan kedalam stator.
BAB III. METODOLOGI PENELITIAN
Bab ini membahas tentang cara yang harus ditempuh dalam kegiatan penulisan agar pengetahuan yang akan dicapai dari suatu penelitian dapat memenuhi kaidah ilmiah.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi data hasil eksperimen dan analisis data.
BAB V. KESIMPULAN DAN SARAN
ABSTRAK
TUGAS AKHIR
RANCANG BANGUN PENGEREMAN DINAMIK MOTOR INDUKSI TIGA FASA DENGAN PENGATURAN ARUS DC DAN OUTPUT ROTOR
Diajukan untuk memenuhi persyaratan
Menyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro Sub Konsentrasi Teknik Energi Listrik
Oleh
Guntur Andy
NIM: 110402046
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
ABSTRAK
KATA PENGANTAR
Puji syukur kepada Tuhan Yang Maha Esa yang telah memberikan anugerah serta kasih dan rahmat-Nya yang berlimpah kepada penulis sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “Rancang Bangun Pengerman Dinamik Motor Induksi 3 Fasadengan Pengaturan Arus DC dan
Tegangan Output Rotor” Tugas Akhir ini dibuat sebagai syarat untuk menyelesaikan pendidikan Sarjana (S-1) di Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara. Penulis berharap ke depannya Tugas Akhir ini dapat menjadi inspirasi bagi mahasiswa dalam mengembangkan penelitian ini.
Tugas Akhir ini penulis persembahkan kepada yang teristimewa, yang telah menyayangi, mendidik serta menjadi inspirasi penulis yaitu kedua Orang Tua penulis Darwis Sihotang dan Yustina Sitohang yang semangat dari mereka, penulis banyak mendapat pelajaran yang sangat berharga, serta bimbingan yang tiada berkesudahan. Mereka lah alasan penulis akan selalu berusaha dan bekerja dengan semangat untuk dapat memberikan semua yang terbaik buat mereka. Serta Kakanda Yusiana, S.P , Abangda Alex Chandra dan Abangda Epraim dan Adinda Dwi Anggun Alami, SKM yang selalu memberikan dukungan dan motivasi secara terus menerus.
1. Bapak Ir. Surya Tarmizi Kasim, M.Si.selaku ketua jurusan Departemen Teknik Elektro Universitas Sumatera Utara.
2. Bapak Ir. Riswan Dinzi, MT selaku Dosen Pembimbing Tugas Akhir penulis, atas segala kesabaran dan motivasi yang besar dari beliau kepada penulis dalam menyelesaikan Tugas Akhir ini. Penulis berharap agar terus mendapatkan bimbingan dari beliau.
3. Seluruh Staf Pengajar Departemen Teknik Elektro, khususnya bapak Ir. Zulkarnain Pane, Ir. Masykur Sj, Ir. Eddy Warman, Ir. Panusur S.M.L. Tobing, dan Ibu Ir. Windalina Syafiar yang telah banyak memberi inspirasi dan masukan bagi penulis untuk lebih baik dalam bersikap.
4. Seluruh staf pegawai Departemen Teknik Elektro Abangda penulis Arbi Divo dan Kakanda penulis Ummi dan Ester yang telah banyak membantu. 5. Saudara seperjuangan penulis di Teknik Elektro yang sudah seperti
H Hutagaol Marco, Zhuhri Ramadhani, Longser Tampubolon, serta teman – teman lain yang tidak dapat disebutkan semua yang telah membantu dan mendukung penulis menyelesaikan tugas akhir ini.
6. Kepada senior – senior di elektro yang telah membantu serta membimbing dan memberikan pengetahuan tambahan yang sangat berguna bagi penulis dalam menyelesaikan tugas akhir ini.
7. Kepada seluruh staf P4TK departemen listrik khususnya Bapak Simatupang, Bapak Hefri, Ibu Durhana yang telah banyak membantu penulis dalam menguji dan mendapatkan data yang sangat diperlukan dalam menyelesaikan tugas akhir ini
8. Serta semua pihak yang telah membantu penulis dalam penyelesaikan tugas akhir ini.
Semoga segala bantuan yang tidak ternilai harganya ini mendapat imbalan di sisi Tuhan Yang Maha Esa sebagai amal ibadah, Amin. Akhirnya penulis menyadari bahwa skripsi ini masih jauh dari kesempurnaan, untuk itu kritik saran yang membangun dari berbagai pihak sangat penulis harapkan demi perbaikan-perbaikan ke depan. Amin.
Medan, 3Mei 2016 Penulis,
Daftar Isi
Halaman
Abstrak ... i
Kata Pengantar……….. ii
Daftar Isi ... v
Daftar Gambar ... vii
Daftar Tabel ... x
BAB 1. PENDAHULUAN... 1
1.1 Latar Belakang………..… 1
1.2 Perumusan Masalah……….. 2
1.3 Batasan Masalah ... 3
1.4 Tujuan dan Manfaat Penulisan... 4
1.5 Metodologi Penulisan ... 4
1.6Sistematika Penulisan ... 5
BAB II. TINJAUAN PUSTAKA ... 7
2.1 Motor Induksi ... 7
2.2 Konstruksi Motor Induksi ... 7
2.2.1 Stator ... 8
2.2.2Rotor ... 10
2.3 Prinsip Kerja Motor Induksi ... 11
2.4 Pengereman Motor Listrik... ... 13
2.4.1 Pengereman Mekanis... ... 14
2.4.2 Pengeraman Secara Elektrodinamik... 15
2.5Proses Rancang Bangun ... 21
2.6Prinsip Kerja Rangkaian Pengendali ... 23
2.7Penyearah Penuh Satu Fasa ... 25
2.8 Mikrokontroler Atmega 8 ... 29
BAB III. METODOLOGI PENELITIAN ... 32
3.1 Tempat dan Waktu ... 32
3.2 Bahan dan Perlengkapan ... 32
3.3 Prosedur Penelitian ... 33
BAB IV. PENGUJIAN SISTEM DAN ANALISA DATA………...36
4.1 Metode Pengujian………... 36
4.2 Pengujian Pengereman Dinamik………. 37
4.2.1Simulasi Pengereman Motor Induksi 3 Fasa 2,2 Kw..….... 43
4.2.2Simulasi Pengereman Motor Induksi 3 Fasa 5,5 Kw...…... 45
4.2.3Simulasi Pengereman Motor Induksi 3 Fasa 11 Kw...…... 60
BAB V. KESIMPULAN DAN SARAN……….……….. 69
5.1 Kesimpulan………...…..…. 69
5.2 Saran………..……….. 70
Daftar Gambar
Gambar 2.1 Konstruksi stator dan rotor motor induksi……….. 8 Gambar 2.1.1 Komponen stator motor induksi 3 fasa……… 9 Gambar 2.2 Bentuk alur slot………... 9 Gambar 2.3 a) Rotor belitan
b) Motor induksi tiga fasa rotor belitan……….. 10 Gambar 2.4 a) Rotor sangkar tupai
b) Motor induksi tiga fasa rotor sangkar tupai………... 11 Gambar 2.5 Skematik diagram motor induksi rotor belitan……… 11 Gambar 2.6 Rangkaian pengereman regeneratif motor induksi 3 fasa…….. 16 Gambar 2.7 Rangkaian pengereman plugging motor induksi 3 fasa…….. 17 Gambar 2.8 Rangkaian pengereman dinamik motor induksi 3 fasa……….. 18 Gambar 2.9 Diagram blok pengereman dinamik motor induksi 3
fasa dengan dengan menggunakan pengendali…...….. 20 Gambar 2.10 Rangkaian kendali pengereman dinamik motor
induksi 3 fasa…... 25 Gambar 2.11 Penyearah setengah gelombang………...……. 26 Gambar 2.12 Penyearah gelombang penuh dengan transformator
Gambar 2.14 Rangkaian filter digunakan untuk mengurangi denyut…….. 28 Gambar 2.15 Kemasan PDIP Atmega 8……….……….. 30 Gambar 2.16 Arsitektur AVR Atmega 8………..……… 31 Gambar 4.2.1 Rangkaian percobaan pengereman dinamik motor induksi
3 fasa terkontrol….………... 37 Gambar 4.2.2 Alat kontrol pengereman dinamik motor induksi
3 fasaterkontrol…...………... 37 Gambar 4.2.1.1.1 Rangkaian simulasi menggunakan matlab pengereman
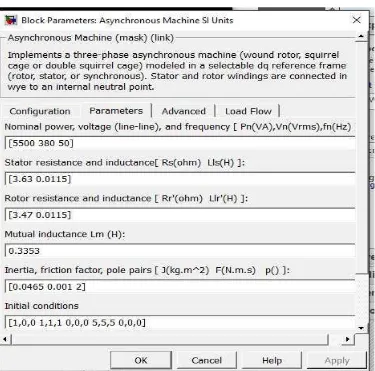
dinamik motor induksi 3 fasa rotor belitan…..…………. 40 Gambar 4.2.1.1.2 Parameter Matlab motor induksi 3 fasa rotor belitan… 37 Gambar 4.2.1.1 (a) Grafik kecepatan putar dengan pengereman motor
Induksi terkontrol motor induksi 2,2 Kw………….……. 43 Gambar 4.2.1.1 (b) Grafik kecepatan putar dengan pengereman
motor induksi terkontrol motor induksi 2,2 Kw……..…. 45 Gambar 4.2.1.2 (a) Grafik kecepatan putar dengan pengereman motor
Gambar 4.2.2.1 (b) Grafik kecepatan putar dengan pengereman motor
Induksi tak terkontrol motor induksi 5,5 Kw………… 53 Gambar 4.2.2.2 (a) Grafik kecepatan putar dengan pengereman motor
Induksi tak terkontrol motor induksi 5,5 Kw………... 54 Gambar 4.2.2.2 (b) Grafik kecepatan putar dengan pengereman motor
Induksi tak terkontrol motor induksi 5,5 Kw………... 56 Gambar 4.2.2.3 (a) Grafik pengereman plugging motor induksi 5,5 Kw.. 57 Gambar 4.2.2.3 (b) Grafik pengereman plugging motor induksi 5,5 Kw.. 58 Gambar 4.2.3.1 (a) Grafik kecepatan putar dengan pengereman motor
Induksiterkontrol motor induksi 11 Kw………. 60 Gambar 4.2.3.2 (b) Grafik kecepatan putar dengan pengereman motor
Induksi terkontrol motor induksi 11 Kw…..……...……. 62 Gambar 4.2.3.2 (a) Grafik kecepatan putar dengan pengereman motor
Induksi tak terkontrol motor induksi 11 Kw…..………. 63 Gambar 4.2.3.2 (b) Grafik kecepatan putar dengan pengereman motor
Daftar Tabel
Tabel 4.2.1 Perbandingan waktu dan arus pengereman dinamik tanpa kontrol,
dinamik terkonrol dan plugging motor 1 Kw……… 38 Tabel 4.2.1.1 Perbandingan waktu dan arus pengereman dinamik tanpa
kontrol,dinamik terkonrol dan plugging motor 2,2 Kw... 50 Tabel 4.2.2.1 Perbandingan waktu dan arus pengereman dinamik tanpa
kontrol, dinamik terkonrol dan plugging motor 5,5 Kw… 59 Tabel 4.2.3.1 Perbandingan waktu dan arus pengereman dinamik tanpa