BAB II
LANDASAN TEORI
2.1 Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai
sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut,
motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik
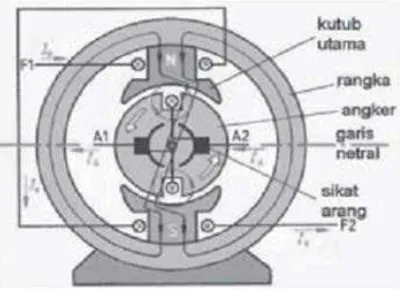
maka arah putaran motor akan terbalik pula seperti pada gambar 2.1. Polaritas dari
tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan
besar dari beda tegangan pada kedua terminal menentukan kecepatan motor.
Gambar 2.1 Kontruksi motor DC
Konstruksi motor DC pada gambar 2.1 memiliki 2 bagian dasar,yaitu :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet,
baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik
mengalir.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada
penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan
dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir
pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F,
timbul tergantung pada arah arus I, dan arah medan magnet B.
2.2 Driver Motor DC dengan IC L293D
Pada dasarnya beberapa aplikasi yang menggunakan motor DC harus dapat
mengatur kecepatan dan arah putar dari motor DC itu sendiri. Untuk dapat melakukan
pengaturan kecepatan motor DC dapat menggunakan metode PWM (Pulse Width
Modulation) sedangkan untuk mengatur arah putarannya dapat menggunakan rangkaian
H-bridge yang tersusun dari 4 buah transistor. Tetapi dipasaran telah disediakan IC
L293D sebagai driver motor DC yang dapat mengatur arah putar dan disediakan pin
untuk input yang berasal dari PWM untuk mengatur kecepatan motor DC. Untuk lebih
memahami tentang membangkitkan sinyal PWM menggunakan fitur Timer pada
mikrokontroler AVR dapat membacanya pada postingan tutorial AVR tentang PWM.
Sebelum membahas tentang IC L293D, alangkah baiknya jika kita membahas driver
motor DC menggunakan rangkaian analog terlebih dahulu.
Jika diinginkan sebuah motor DC yang dapat diatur kecepatannya tanpa dapat
mengatur arah putarnya, maka kita dapat menggunakan sebuah transistor sebagai driver.
Untuk mengatur kecepatan putar motor DC digunakan PWM yang dibangkitkan melalui
fitur Timer pada mikrokontroler. Sebagian besar power supply untuk motor DC adalah
Oleh karena itu digunakan transistor sebagai penguat tegangan. Dibawah ini
adalah gambar driver motor DC menggunakan transistor. Salah satu jenis motor yang
sering digunakan dalam bidang kontrol yaitu Motor DC. Motor DC akan berputar jika
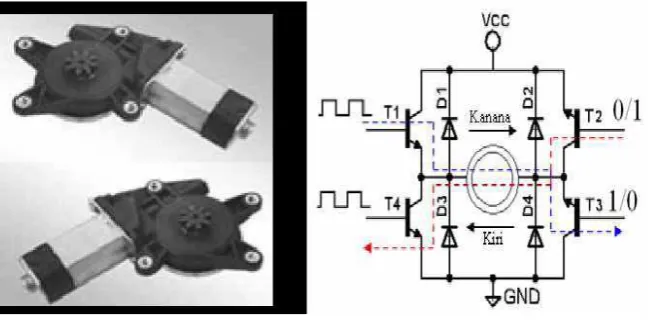
dialiri tegangan dan arus DC. Berikut gambar 2.2 adalah motor DC dan jembatan H
yang digunakan pada rancangan alat ini:
Gambar 2.2 Motor DC dan Jembatan H
Sistem pengaturan motor DC yang sering digunakan pada sistem kontrol seperti pada
gambar 2.2 yaitu dengan H-Bridge yang pada pada dasarnya adalah 4 buah transistor
yang difungsikan sebagai saklar. Pengaturan motor DC yaitu meliputi kecepatan dan
arah. Pengaturan arah yaitu dengan cara membalik tegangan logika masukan H-bridge.
Sedangkan sistem pengendalian kecepatan motor DC digunakan prinsip PWM (Pulse
Width Modulator) yaitu suatu metode pengaturan kecepatan putaran motor DC dengan
mengatur lamanya waktu pensaklaran aktif (Duty Cycle). Motor DC merupakan sebuah
komponen yang memerlukan arus yang cukup besar untuk menggerakannya. Oleh
karena itu motor DC biasanya memiliki penggerak tersendiri. Pada tugas akhir ini motor
rangkaian HBridge. Dengan rangkaian H-Bridge yang memiliki input PWM ini, maka
selain arah kita juga bisa mengendalikan kecepatan putar motor DC tersebut.
2.3 KIT Mikrokontroler Arduino Uno
Arduino Uno adalah kit elektronik atau papan rangkaian elektronik open source
yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan
jenis AVR dari perusahaan Atmel. Arduino adalah sebuah board mikrokontroller yang
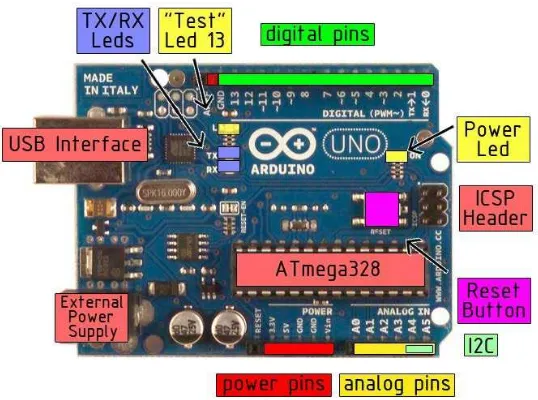
berbasis ATmega328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat
digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB,
jack power, kepala ICSP, dan tombol reset. Arduino mampu men-support
mikrokontroller; dapat dikoneksikan dengan komputer menggunakan kabel USB.
Berikut gambar 2.3 adalah pin-pin pada kit arduino uno yang digunakan pada rancangan
alat ini:
Pada gambar 2.3 terdapat 14 pin output/input yang mana 6 pin dpat digunakan
sebagai output PWM, 6 analog input, cristal osilator 16 MHZ dan tombol reset. Arduino
tersebut digunakan sebagai chip mikrokontroler328, sebagai pengendali gerakan motor
DC.
2.3.1 Diagram Blok dan Fungsi PIN Pada Kit Arduino
Berikut gambar 2.4 adalah bentuk diagram blok dari kit arduino:
Gambar2.4. Diagram Blok KIT arduino
Fungsi PIN pada kit Arduino uno pada gambar 2.3 adalah sebagai berikut:
• PIN Power
Arduino dapat diberikan power melalui koneksi USB atau power supply.
Power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat dikoneksikan
dengan mencolok jack adaptor pada koneksi port input supply. Board arduino dapat
dioperasikan menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari
7V, kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bisa menjadi tidak
stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat
panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7
sampai 12 volt
Penjelasan pada pin power adalah sebagai berikut :
Vin
Tegangan input ke board arduino ketika menggunakan tegangan dari luar (seperti yang
disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan). Pengguna dapat
memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan power
jack, aksesnya menggunakan pin ini.
5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya
pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh
USB atau supply regulasi 5V lainnya.
3V3
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya adalah
50mA
• Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang
digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk
EEPROM. Input dan Output Setiap 14 pin digital pada arduino dapat digunakan
sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan
digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau
menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected oleh
default) 20- 50 KOhms.
Beberapa pin memiliki fungsi sebagai berikut :
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim
(TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB
FTDI ke TTL chip serial.
Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah
interap pada low value, rising atau falling edge, atau perubahan nilai.
PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi
analogWrite().
LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin
bernilai HIGH, LED hidup, ketika pin LOW, LED mati.
• Konektor USB
Konektor USB adalah soket untuk kabel USB yang disambungkan ke komputer
atau laptop. Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai
port komunikasi serial.
• Input / Output Digital
Input/Output Digital atau digital pin adalah pin-pin untuk menghubungkan
arduino terdapat pada kaki 1 samapai kaki 13. Misalnya kalau ingin membuat
LED berkedip, LED tersebut bisa dipasang pada salah satu pin I/O digital dan
ground. Komponen lain yang menghasilkan output digital atau menerima input
digital bisa disambungkan ke pin-pin ini. • Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima
sinyal dari komponen atau rangkaian analog. Misalnya dari potensiometer,
sensor suhu, sensor cahaya, dsb. • Baterai / Adaptor
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan
dari baterai/adaptor 9V pada saat Arduino sedang tidak disambungkan ke
komputer. Kalau Arduino sedang disambungkan ke komputer melalui USB,
Arduino mendapatkan suplai tegangan dari USB, jadi tidak perlu memasang
baterai/adaptor saat memprogram Arduino.
2.3.2 Mikrokontroler ATMega328
Mikrokontroller merupakan sebuah processor yang digunakan untuk
kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu
komputer pribadi dan computerainframe, mikrokontroller dibangun dari elemen –
elemen dasar yang sama. Seperti umumnya komputer, mikrokontroller adalah alat yang
mengerjakan instruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting
dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat
oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan
tugas yang lebih kompleks yang diinginkan oleh programmer.
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai
arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi
data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).
Mikrokontroller ini memiliki beberapa fitur antara lain :
• 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
• 32 x 8-bit register serba guna.
• Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
• 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB
dari flash memori sebagai bootloader.
• Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory)
sebesar 1KB
sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat
menyimpan data meskipun catu daya dimatikan.
• Memiliki pin I/O digital sebanyak 14 pin ,6 diantaranya PWM (Pulse Width
Modulation) output.
Mikrokontroller ATmega 328 memiliki arsitektur Hardware, yaitu memisahkan memori
untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan
parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur
tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil
dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat
dieksekusi dalam setiap satu siklus clock. Ketiga register pointer 16-bit ini disebut
dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan
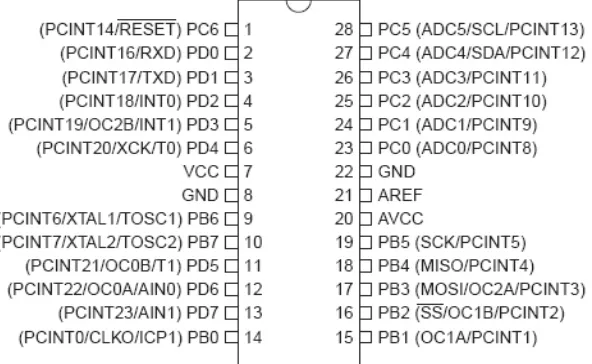
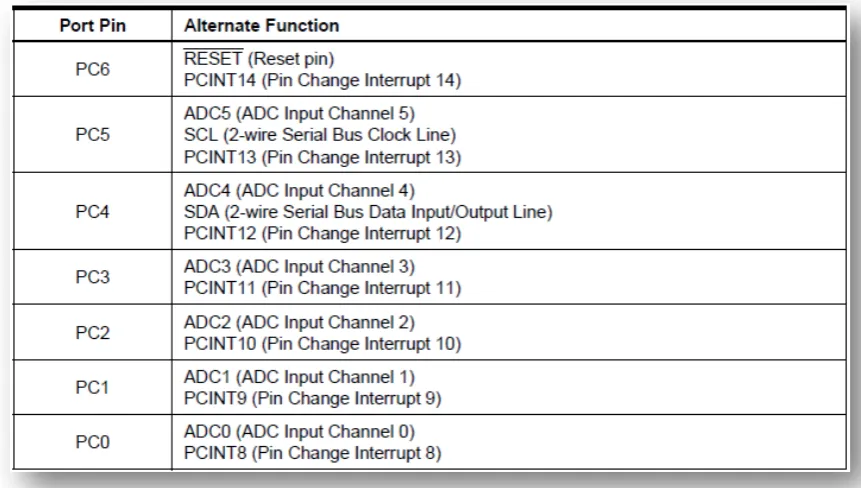
2.3.2.2 Konfigurasi PIN ATMega328
Berikut gambar 2.4 adalah konfigurasi pin ATMega328 yang digunakan pada rancangan alat ini:
Gambar2.4 Konfigurasi PIN ATMega328
Table 2.2 Konfigurasi Port C
2.4 Pemrograman Dasar Arduino Uno
2.4.1 Stuktur Dasar Pemrograman Arduino
Struktur dasar arduino hanya terjadi dalam dua bagian:
Void setup()
{
// Statement; di eksekusi satu kali}
Void loop() {
// Statement; di eksekusi terus menerus }
• Setup
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali di
jalankan. Ini digunakan untuk mendifinisikan mode pin atu memulaikomunikasi serial.
Fungsi setup() harus di ikut sertakan dalam program ,walaupun tidak ada statement
yang di jalankan.
Contoh pemrograman yang menggunakan fungsi setup sebagai berikut:
Void setup ()
{
pinMode(3,OUTPUT) ; // men-set “pin” 3 sebagai Output
pinMode(6, INPUT); // men-set pin 6 sebagai Input
Serial.begin(9600);
}
Keterangan:
pinMode() = berfungsi untuk mengatur fungsi sebuah pin sebagaiINPUT atau
OUTPUT.
Serial.begin(9600) = digunakan untuk mengaktifkan fitur UART
• Loop
Setelah melakukan fungsi setup() maka secara langsung akanmelakukan fungsi
loop() secara berurutan dan melakukan instruksi-instruksi ayang ada dalam fungsi
loop().
void loop()
{
If (digitalRead(6)==HIGH) // membaca input digital pin 6
{
xstart = millis(); //aktifkan timer
digitalWrite(3, HIGH); // nyalakan pin 3
delay( 1 0 0 0 ) ; / / p a u s e 1 d e t i k
digitalWrite(3, LOW); // matikan pin 3
}
}
Keterangan:
o digitalWrite : Untuk memberikan nilai LOW dan HIGH pada sebuah pin
output.
o Delay : Untuk memberikan waktu tunda dalam satuan millisekon.
o digitalRead : Untuk membaca logika LOW dan HIGH
2.4.2. Struktur Pengaturan Program
Program sangat tergantung pada pengaturan apa yang akan dijalankan
berikutnya, berikut ini adalah elemen dasar pengaturan program:
if..else, dengan format seperti berikut ini:
if (kondisi) { }
else if (kondisi) { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam
kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan diperiksa
apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada else yang akan
dijalankan.
for, dengan format seperti berikut ini:
for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal
beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan.
Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i–.
Input/Output Digital
a. pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan
digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah
INPUT atau OUTPUT.
b. digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikan HIGH
(ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
c. digitalRead(pin)
Ketika sebuah pin ditetapkan sebagai INPUT maka anda dapat menggunakan kode ini
untuk mendapatkan nilai pin tersebut apakah HIGH (ditarik menjadi 5 volts) atau LOW
Input/Output Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam
alam analog (menggunakan trik). Berikut ini cara untuk menghadapi hal yang bukan
digital.
a) analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5,
6, 9, 10, 11. Ini dapat merubah pin hidup (on)atau mati (off) dengan sangat cepat
sehingga membuatnya dapat berfungsi layaknya keluaran analog. Value (nilai) pada
format kode tersebut adalah angka antara 0 ( 0% duty cycle ~ 0V) dan 255 (100% duty
cycle ~ 5V).
b) analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya.
Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
2.4.3 Modulasi Lebar Pulsa (PWM)
Modulasi adalah suatu proses dimana parameter gelombang pembawa (carrier
signal) frekuensi tinggi diubah sesuai dengan salah satu parameter sinyal
informasi/pesan. Dalam hal ini sinyal pesan disebut juga sinyal pemodulasi. Proses
modulasi dilakukan pada bagian pemancar. Proses kebalikannya yang disebut
demodulasi dilakukan pada bagian penerima. Dalam demodulasi, sinyal pesan
dipisahkan dari sinyal pembawa frekuensi tinggi.
Dengan modulasi pulsa, sinyal informasi diubah menjadi pulsa-pulsa persegi dengan
frekuensi dan amplitude tetap tapi dengaan lebar pulsa sebanding dengan amplitude
sinyal informasi. Salah satu teknik modulasi pulsa yang digunakan adalah teknik
modulasi durasi atau lebar waktu tunda positif ataupun tunda negative pulsa-pulsa
Rancangan alat ini menggunakan modulasi lebar pusa,atu sering disebut Pulse
With Modulation (PWM). Modulasi lebar pulsa digunakan untuk mentransfer data pada
telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan
tegangan rata-rata yang berbeda.
Rangkaian osilator dapat berperilaku sebagai modulator lebar pulsa apabila salah
satu resistor (LDR) dikondisikan dapat berubah karena adanya pengaruh dari besaran
fisis lainnya. Light Dependent Resistor (LDR) merupakan resistor yang besar
resistansi-nya bergantung terhadap intensitas cahaya yang menyelimuti permukaanresistansi-nya. LDR,
dikenal dengan banyak nama: foto-resistor, foto-konduktor, sel foto-konduktif, atau
hanya sel. Dan yang sering digunakan dalam literatur adalah resistor atau
foto-sel. Pada gambar.1 diatas digunakan juga kapasitor. Dengan penambahan kapasitor,
nilai VLDR tidak akan berubah secara signifikan. Tetapi respon terhadap perubahan
intensitas memang sedikit lebih lambat. Namun, dengan kapasitor tersebut, tegangan
VLDR akan lebih stabil. Untuk membangkitkan sinyal PWM, digunakan komparator
untuk membandingkan dua buah masukan yaitu generator sinyal dan sinyal referensi.
Hasil keluaran dari gambar 2.5 adalah sinyal PWM yang berupa pulsa-pulsa persegi
yang berulang-ulang. Durasi atau lebar pulsa dapat dimodulasi dengan cara mengubah
Gambar2.5 Modulasi lebar pulsa
Seperti pada gambar 2.5 adalah metode PWM digunakan untuk mengatur kecepatan
motor, informasi yang dibawa oleh pulsa-pulsa persegi merupakan tegangan rata-rata.
Semakin lebar durasi waktu tunda positif pulsa dari sinyal PWM yang dihasilkan, maka
2.5 Webcam
Webcam adalah kamera kecil yang dapat menangkap gambar serta video.
Memasang webcam seperti pada gambar 2.6 sangatlah mudah karena webcam tersebut
memiliki fitur fungsionalitas USB pasang dan penggunaan yang mudah, dan semuanya
itu hanya membutuhkan beberapa langkah mudah untuk memasang dan
mengoperasikan webcam.
Gambar 2.6 Webcam
Webcam seperti pada gambar 2.6 digunakan pada rancangan tugas akhir ini adalah
produk dari Sun Flower dengan tipe SF- 1007. Spesifikasi dari webcam ini yaitu :
1. Resolusi : 160x120, 176x144, 320x240, 352x288, 640x480.
2. Hasil record berformat data AVI.
3. Pengaturan fokus kamera terdapat pada sisi depan kamera yaitu secara
manual.
4. Pengaturan pencahayaan putih (white balance)secara otomatis.
5. Dilengkapi built-in image compression.
2.6 Komputer Notebook Input/Output
Komputer Netbook merupakan perangkat utama pada sistem pengendalian
orientasi webcam, karena disinilah pusat pengolahan data. Komputer tidak hanya
sebagai pusat pengolah data, tetapi komputer juga berfungsi sebagai pengendali gerakan
mekanis motor DC dan sebagai display untuk monitoring ruangan. Program pada
computer Netbook adalah Input untuk rancangan alat ini. Kemudian data/Program
tersebut akan dikirim pada arduino melalui port serial. Dengan menggunakan modul
arduino, maka putaran motor DC dapat diatur. Kemudian kamera webcam akan
bergerak kemanapun motor DC bergerak. Objek yang ditangkap oleh kamera webcam
akan ditampilkan pada komputer. Output dari Komputer Netbook adalah tampilan dari
kamera webcam, gerakan mekanis motor dan pengontrol gerakan motor.
2.7 Visual Basic 6.0
Dalam rancangan alat ini, digunakan Visual Basic 6.0 yang berfungsi untuk
menterjemahkan tombol yang ditekan pada PC jadi gerakan motor DC melalui sebuah
program. Rancangan alat ini menggunakan program Visual Basic 6.0 , karena Visual
Basic merupakan bahasa pemrograman yang sangat mudah dipelajari. Dengan teknik
pemrograman visual yang memungkinkan penggunanya untuk berkreasi lebih baik
dalam menghasilkan suatu program aplikasi. Ini terlihat dari dasar pembuatan dalam
visual basic adalah FORM, dimana pengguna dapat mengatur tampilan form kemudian
dijalankan dalam script yang sangat mudah.
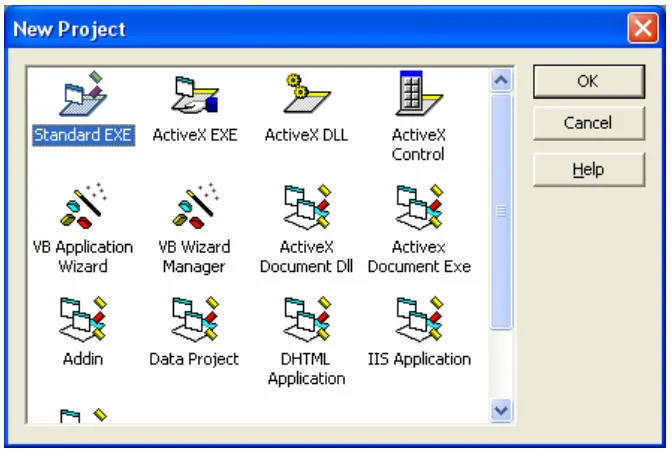
Untuk memulai pembuatan program aplikasi di dalam Visual Basic, yang
dilakukan adalah membuat project baru. Project adalah sekumpulan form, modul,
dapat dilakukan dengan memilih menu [File] >> [New Project] atau dengan menekan
ikon [new project] pada Toolbar yang terletak di pojok kiri atas. Setelah itu akan
muncul konfirmasi untuk jenis project dari program aplikasi yan akan dibuat seperti
terlihat pada gambar di 2.7 dibawah ini:
Gambar 2.7. Layar Pemilih Jenis Projek
Seperti pada gambar 2.7, Visual Basic 6.0 menyediakan 13 jenis project yang bisa
dibuat seperti terlihat pada gambar 1.3 di atas. Ada beberapa project yang biasa
digunakan oleh banyak pengguna Visual Basic, antara lain:
(1) Standard EXE: Project standar dalam Visual Basic dengan komponen-komponen
standar. Jenis project ini sangat sederhana, tetapi memiliki keunggulan bahwa semua
komponennya dapat diakui oleh semua unit komputer dan semua user meskipun
bukan administrator. Pada buku ini akan digunakan project Standard EXE ini,
sebagai konsep pemrograman visualnya.
(2) ActiveX EXE: Project ini adalah project ActiveX berisi komponen-komponen
(3) ActiveX DLL: Project ini menghasilkan sebuah aplikasi library yang selanjutnya
dapat digunakan oleh semua aplikasi di sistem operasi windows.
(4) ActiveX Control: Project ini menghasilkan komponen-komponen baru untuk
aplikasi Visual Basic yang lain
(5) VB Application Wizard: Project ini memandu pengguna untuk membuat aplikasi
secara mudah tanpa harus pusing-pusing dengan perintah-perintah pemrograman.
(6) Addin: Project seperti Standard EXE tetapi dengan berbagai macam komponen
tambahan yang memungkinkan kebebasan kreasi dari pengguna.
(7) Data project: Project ini melengkapi komponennya dengan komponen-komponen
database. Sehingga bisa dikatakan project ini memang disediakan untuk keperluan
pembuatan aplikasi database.
(8) DHTML Application: Project ini digunakan untuk membuat aplikasi internet pada
sisi client (client side) dengan fungsi-fungsi DHTML.
(9) IIS Application: Project ini menghasilkan apliaksi internet pada sisi server (server
side) dengan komponen-komponen CGI (Common Gateway Interface).
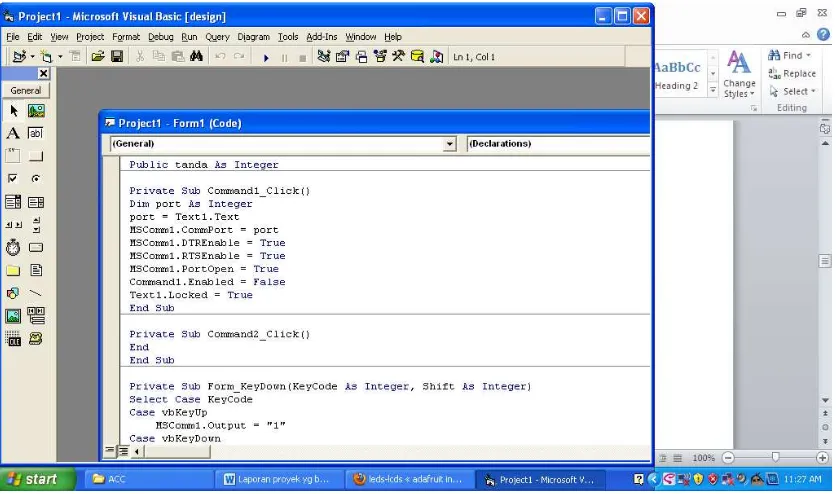
Selanjutnya pilih Standard EXE dan tekan [Ok]. Lalu muncul tampilan dari
Standard Exe seperti pada gambar 2.8. Dengan demikian project sudah siap dibuat.
Dalam pembuatan project sebelumnya double click pada form yang terbuat maka adak
terlihat jendela tersembunyi (hidden windows) yang berupa jendela untuk pembuatan
program atau jendela kode (code windows). Hal ini Dapat dilakukan dengan cara
Gambar2.8 Jendela Form Visual Basic
Gambar 2.8 adalah tampilan dari jendela form visual basic 6.0 , yang didalamnya sudah