KONTROL OPTIMAL UNTUK DISTRIBUSI TEMPERATUR
DENGAN PENDEKATAN BEDA HINGGA
Nama Mahasiswa : Asri Budi Hastuti NRP : 1205 100 006
Dosen Pembimbing : Drs. Kamiran, M.Si.
Abstrak
Kontrol optimal temperatur fluida suatu kontainer sangat diperlukan untuk menjaga kondisi benda yang tersimpan didalamnya. Permasalahan kontrol muncul untuk mengendalikan perubahan temperatur pada dinding-dinding kontainer. Hal ini disebabkan pada bagian ini terjadi reaksi antara partikel yang bergerak pada bagian padat dinding tersebut akibat pengaruh dari luar dengan partikel yang bergerak pada bagian dalam kontainer (fluida). Oleh karena itu, penelitian ini bertujuan untuk mengontrol temperatur pada dinding-dinding kontainer sedemikian hingga temperatur pada bagian tersebut sesuai dengan kondisi temperatur yang diharapkan.
Untuk menyelesaikan permasalahan kontrol diatas maka kontainer digambarkan dalam domain dimensi dua dan mempunyai model matematika berupa persamaan differensial parsial. Analisis terhadap fungsional biaya dilakukan untuk memberikan spesifikasi dari sistem. Dari analisis fungsional ini muncul masalah kontrol optimal dengan konstrain berupa persamaan differensial parsial. Oleh karena itu bentuk konstrain ini akan diubah menjadi persamaan linier menggunakan pendekatan beda hingga. Melalui pendekatan beda hingga, masalah kontrol optimal menjadi masalah kontrol optimal diskrit dengan konstrain linier. Selanjutnya, masalah kontrol optimal ini diselesaikan menggunakan metode pengali Lagrange.
Kata kunci : Optimal control, Beda hingga, pengali Lagrange
1. Pendahuluan
Kontrol temperatur didalam suatu kontainer sangat diperlukan untuk menjaga kondisi benda yang ada didalamnya. Salah satu contohnya, sebuah lemari pendingin yang digunakan untuk menyimpan bahan makanan. Kondisi yang diharapkan adalah pada saat derajat temperatur mencapai puncak, bahan makanan tersebut tidak rusak, tidak berkurang kandungan nutrisinya dan tidak kehilangan rasa serta kualitasnya. Permasalahan kontrol muncul untuk mengendalikan perubahan temperatur pada dinding-dinding kontainer. Hal ini disebabkan pada bagian ini terjadi reaksi antara partikel yang bergerak pada bagian padat dinding tersebut akibat pengaruh dari luar dengan partikel yang bergerak pada bagian dalam kontainer (fluida). Oleh karena itu, penelitian ini bertujuan untuk mengontrol temperatur pada dinding-dinding kontainer sedemikian hingga temperatur pada bagian tersebut sesuai dengan kondisi temperatur yang diharapkan.
Permasalahan yang muncul selanjutnya adalah bagaimana meminimalkan selisih temperatur yang sebenarnya dengan temperatur yang diharapkan. Selisih ini adalah kesalahan pada sistem yang dikaji. Sehingga masalah kontrol optimal pada penelitian ini adalah mendapatkan kontrol yang dapat meminimalkan kesalahan tersebut. Pendekatan elemen hingga digunakan untuk mengubah konstrain masalah kontrol optimal yang berbentuk
persamaan differensial parsial menjadi bentuk persamaan matrik. Setelah diperoleh persamaan matrik ini maka masalah kontrol optimal bisa diselesaikan dengan metode pengali Lagrange.
2. Kontrol Optimal
Pekerjaan utama dari kontrol optimal adalah menentukan sinyal kontrol yang menyebabkan proses (plant) memenuhi beberapa konstrain dan mengoptimalkan (maksimum atau minimum) indeks performansi yang dipilih.
Perumusan masalah kontrol optimal memerlukan:
1. Deskripsi matematika (model)
Bentuk fisik plant digambarkan dalam bentuk sistem persamaan differensial linier atau sistem persamaan differensial taklinier. Sebagai contoh, diberikan suatu plant
Fungsi merupakan fungsi linier atau fungsi taklinier, variabel x disebut variabel state (keadaan) dan u adalah variabel kontrol. 2. Spesifikasi Indeks Performansi
Dalam masalah optimal kontrol, pemilihan indeks performansi didasarkan pada indeks yang memberikan spesifikasi pada sistem (plant). Selanjutnya, indeks performansi ini dinamakan fungsional biaya.
3. Konstrain (batasan)
Variabel kontrol dan variabel keadaan bisa tidak diberi batasan (unconstrained) dan bisa diberikan batasan (constrained)
berdasarkan pada kondisi fisik dari sistem. Contoh masalah constrained, diberikan kontrol dan state sedemikian hingga
dan
dengan + dan – menunjukkan nilai maksimum dan minimum yang harus dicapai.
Selanjutnya, masalah kontrol optimal dengan konstrain bisa dinyatakan dengan
dengan merupakan cost function.
3. Penyelesaian Masalah Kontrol Optimal 3.1. Permasalahan Kontrol
Pada umumnya, sistem kontrol temperatur menggunakan sistem loop tutup balikan. Kontrol sistem tersebut digambarkan pada block diagram berikut ini.
Pada Gambar 1, yang menjadi input adalah temperatur yang diinginkan. Salah satu contoh yang menggambarkan permasalahan kontrol temperatur fluida ini adalah temperatur didalam lemari pendingin. Lemari pendingin mempunyai pengatur temperatur (temperatur yang diinginkan). Sedangkan thermostat (actuator) digunakan untuk mengukur temperatur yang sebenarnya dan mesin kompressor sebagai sumber energi. Sedangkan lemari pendingin disini adalah sebagai environment (lingkungan).
Selanjutnya, untuk menyelesaikan permasalahan kontrol ini, bentuk fisik kontainer akan digambarkan domain dua dimensi.
3.2. Domain Permasalahan
Secara matematika, bentuk fisik dari kontainer digambarkan dalam domain dua dimensi . Domain tersebut ditentukan sebagai berikut (Shenoy dkk, 1996): domain
∈
R2 terdiri dari subdomain padat dan subdomain fluida yang dipisahkan olehinterface Γw yaitu lapisan batas antara
bagian padat dan bagian fluida domain . Sehingga bisa ditulis
Domain padat dibatasi oleh
, sedangkan domain fluida
dibatasi oleh dengan merupakan batas aliran masuk dan
merupakan batas aliran keluar. Kontroller (pengontrol) diletakkan sepanjang dan sumber energi (pemanas atau pendingin) bisa diletakkan di bagian padat atau bagian fluida. Gambar domain tersebut diberikan berikut ini:
Pada Gambar 2, dinding-dinding kontainer tersebut adalah batas Γw. Sehingga, tujuan dari penelitian ini adalah mengontrol temperatur sepanjang Γw sedemikian hingga temperatur pada batas tersebut sesuai dengan kondisi temperatur yang diharapkan.
Perubahan panas atau energi yang terjadi pada domain digambarkan dalam model matematika. Akan tetapi pada penelitian ini proses pemodelan diabaikan. Model matematika yang digunakan untuk menggambarkan domain ini, menggunakan model yang sudah diperoleh sebelumnya. Model matematika yang dimaksud adalah Persamaan Navier-Stokes. Agar permasalahan pada Tugas Akhir ini memenuhi persamaan Navier-Stokes, aliran fluida dalam domain diberikan asumsi-asumsi berikut ini:
1. Aliran fluida stationer (tidak bergerak) 2. Incompressible (takmampumampat), 3. Aliran stedi, artinya kondisi di titik
manapun, aliran fluida tidak berubah terhadap waktu.
4. Aliran konveksi.
Variabel–variabel yang terkait dengan permasalahan kontrol pada penelitian ini adalah kecepatan u, tekanan p, temperatur
T, dan kontrol g. Aliran fluida pada
memenuhi persamaan Navier-Stokes berikut ini:
di , (1)
Konstrain incompressible di , (2)
dengan syarat batas
pada , (3)
pada , (4)
pada , (5)
Perubahan energi yang terjadi pada domain dinyatakan dengan persamaan panas pada domain padat dan persamaan energi Gambar 1. Kontrol sistem balikan
Actuator
Input Sumber Proses
energi Pengukuran + Domain Gambar 2. Domain Domain
untuk aliran fluida. Persamaan tersebut diberikan berikut ini.
di , (6) di , (7) dengan syarat batas
pada , (8)
pada , (9) dengan Q1 dan Q2 diasumsikan diketahui. Sedangkan konstanta k1 dan k2 bergantung pada koefisien konduktivitas termal, kerapatan, panas jenis pada saat volume konstan dan µ merupakan koefisien viskositas dari fluida.
3.3. Analisis Fungsional Biaya
Salah satu alasan dasar menggunakan kontrol balikan adalah memperbaiki kesalahan (error) pada sistem. Kesalahan pada sistem ini merupakan hal yang penting dalam pengukuran performansi dari sistem. Oleh karena itu, indeks yang dititikberatkan pada penelitian ini adalah error pada sistem. Pada penelitian ini, error tersebut adalah selisih antara temperatur yang diperoleh dari proses dengan temperatur yang diharapkan atau dinyatakan dengan
dengan
: Kesalahan sistem
: Temperatur yang diperoleh dari model (proses)
: Temperatur yang diharapkan.
Selain pada error sistem, pengukuran juga dilakukan untuk variabel kontrol pada . Variabel kontrol disini berupa temperatur sepanjang pada . Oleh karena itu, kontrol dan perubahan kontrol terhadap posisi dibatasi (diatur) agar temperatur yang diperoleh dari proses sedekat mungkin dengan temperatur yang diharapkan artinya errornya sekecil mungkin. Pengaturan kontrol ini disertai dengan parameter regulasi . Parameter ini diberikan agar sistem tetap berada pada penyimpangan yang masih bisa diterima dari kondisi yang diharapkan karena gangguan pada kontrol tidak bisa diprediksikan.
Jadi, indeks performansi pada penelitian ini adalah
(10) Selanjutnya, indeks performansi ini disebut sebagai fungsional biaya.
Dari analisis fungsional biaya ini, masalah kontrol optimal pada penelitian ini adalah
(P1)
Pada penelitian ini, masalah kontrol optimal (P1) ini diasumsikan saja. Masalah kontrol optimal pada penelitian ini diasumsikan well posed.
3.4. Pendekatan Beda Hingga
Salah satu metode yang digunakan untuk menyelesaikan masalah kontrol optimal dengan konstrain berupa persamaan differensial parsial adalah malalui pendekatan beda hingga. Dengan metode beda hingga, plant yang berbentuk persamaan differensial parsial akan diubah menjadi bentuk diskrit.
3.4.1. Diskritisasi Domain
Pada penelitian ini, domain dibagi menjadi beberapa elemen yang sama (seragam). Diskritisasi domain tersebut diberikan pada Gambar 2.
Gambar 3
dengan lxj : lebar dari tiap elemen
lyj : tinggi dari tiap elemen
Ne : banyaknya elemen
Nn : banyaknya global node
Ng : banyaknya node pada batas Ns : banyaknya node pada subdomain
nx : banyaknya grid pada koordinat x ny : banyaknya grid pada koordinat y Jika domain didiskritisasi menjadi nx × ny maka dan
N
e=
n
xn
y. Melalui pendekatan beda hingga ini, variabel kontrol g yang terletak sepanjang menjadi diskrit yaitu node-node yang terletak sepanjang dan bisa dinyatakan dalambentuk vektor
dengan t menunjukkan transpose dari vektor. Selain itu temperatur pada domain
menjadi temperatur pada setiap nodenya yang diberikan oleh vektor
.
dengan adalah temperatur pada node i.
3.4.2. Formulasi Beda Hingga Persamaan Pengendali
Tujuan dari formulasi beda hingga pada persamaan pengendali ini adalah untuk mendapatkan matrik global. Pada tiap subdomain berlaku persamaan pengendali yang berbeda sehingga pengerjaan formulasi beda hingga diberikan secara terpisah terlebih dahulu
.
3.4.2.1. Formulasi Padat Beda HinggaDari persamaan (6) digunakan metode Beda Hingga Maju diperoleh
4
1 2 1 1 , 1 , , 1 , , 1k
l
Q
t
t
t
t
t
x j i j i j i j i j i−
=
+
+
+
−
+ − + −Selanjutnya karena temperatur T pada tiap node
diberikan dan r = 1 2 1
k
l
Q
x−
, sehingga diperoleh matriks
r
P
θ
G
=
G
(11)3.4.2.2. Formulasi Fluida Beda Hingga
Dari persamaan (7) digunakan metode Beda Hingga Maju diperoleh
Matrik Q dibentuk dengan menggunakan aturan
yang sama pada matrik P. Jadi, melalui
pendekatan beda hingga, persamaan energi menjadi persamaan linier yang berbentuk
s
Q
G
G
=
θ
(12)Matrik P dan Q matrik hanya berlaku untuk
masing-masing subdomain padat dan subdomain
fluida. Pada bagian interface ada
keterhubungan antar elemen-elemen pada
dan . Sehingga, penyusunan matrik
global analog dengan penyusunan matrik untuk dua elemen sebelumnya. Secara umum, jika
domain dibagi menjadi maka
. Matrik global dikerjakan dengan program Matlab. Namun, untuk memudahkan notasi dari matrik global , misalkan persamaan matrik global yang diperoleh adalah
(13)
dengan
: Matrik global : Vektor bobot global.
3.4.3. Diskritisasi Cost Function
Untuk diskritisasi fungsi obyektif J, diperkenalkan himpunan dari elemen Ew yaitu elemen yang berada pada interface dan himpunan elemen-elemen Ec yang berada pada batas kontrol . Dengan menggunakan koordinat lokal dari temperatur dan struktur dari grid elemen hingga, diskritisasi fungsional biaya diberikan oleh
(14) Dalam (14), ξ0 menotasikan koordinat lokal
untuk elemen ke-i saat , dimana merepresentasikan koordinat-x di dan menotasikan koordinat lokal untuk elemen ke-i saat , dengan adalah koordinat
y pada interface . Sedangkan,
merepresentasikan distribusi temperatur yang diharapkan, Td (.), pada interface
untuk elemen ke-i. Karena pada permasalahan ini diselesaikan pada koordinat local, maka batas integral untuk tiap elemen menjadi 0 untuk node yang pertama dan 1 untuk node yang kedua. Tujuan penelitian ini adalah mengontrol temperatur pada batas . Sehingga, temperatur pada batas diketahui dengan melakukan interpolasi node-node sepanjang . Untuk masing-masing elemen, interpolasi dua node tersebut adalah
(15) dengan
: Temperatur elemen pada node 1 : Temperatur elemen pada node 2 : Koordinat- node 1
: Koordinat- node 2
Selanjutnya, dengan mensubstitusikan Persamaan (15) ke suku pertama dari fungsional biaya untuk dan menyelesaikan integral tersebut maka akan didapatkan
(16)
Persamaan (16) merupakan penyelesaian untuk suku pertama dari fungsional biaya (14).
Selanjutnya, dengan cara yang sama untuk sebarang elemen di Ec. Pandang suku kedua dan ketiga dari Persamaan (14). Karena sepanjang diberikan atau
, adalah node sepanjang maka nilai bisa diperoleh dengan melakukan interpolasi dua titik yang terletak sepanjang
. Sesuai dengan syarat batas Dirichlet (10), dan . Seperti pada , interpolasi dua node tersebut adalah
(17) dengan
: Kontrol pada node 1 : Kontrol pada node 2 : Koordinat node 1 : Koordinat node 2.
Dengan mensubstitusikan Persamaan (17) ke suku kedua dan ketiga Persamaan (14) maka akan diperoleh
(18) dengan .
3.5. Masalah Kontrol Optimal Diskrit
Melalui pendekatan beda hingga, diskritisasi dilakukan pada temperatur, persamaan pengendali dan juga diskritisasi terhadap
cost function. Oleh karena itu, muncul
masalah kontrol optimal diskrit yang bersesuaian dengan (P1) yang diberikan berikut ini.
(P1)
dengan . Jadi, dengan pendekatan beda hingga, masalah kontrol optimal (P1) yang mempunyai konstrain berbentuk persamaan differensial parsial menjadi masalah kontrol optimal diskrit dengan konstrainnya merupakan persamaan linier. Maka masalah kontrol optimal diskrit ini dapat diselesaikan dengan metode pengali Lagrange.
Dengan menggunakan metode pengali Lagrange, dari (P1) dibentuk fungsi Lagrangian yaitu
. (19) Kondisi ekstrim dari Persamaan (18) adalah
. (20a) . (20b)
. (20c) Variabel pada Persamaan (20a)
merupakan yang ada sepanjang batas yaitu
Sehingga fungsional biaya yang digunakan adalah fungsional biaya (16). Differensiasi pada Persamaan (20a) merupakan turunan terhadap elemen-elemen dari . Karena maka
. Akibatnya, dari syarat batas Dirichlet diperoleh . Sehingga differensiasi dilakukan untuk komponen dari . Turunan fungsi Lagrange terhadap
pada Persamaan (20a) adalah
(21a)
Selanjutnya untuk Persamaan (21b), karena kontrol hanya berhubungan dengan node yang ada pada batas kontrol maka selain node tersebut akan diabaikan. Node tersebut adalah
dan
Cost function yang digunakan adalah
cost function (18).
Differensiasi pada Persamaan (20b) merupakan turunan terhadap komponen-komponen dari . Karena maka
. Sehingga differensiasi dilakukan untuk komponen dari . Jadi, differensiasi terhadap kontrol yang bersesuaian dengan node yang ada sepanjang batas kecuali kontrol pada node atau turunan fungsi Lagrangian terhadap dan
pada Persamaan (20b) adalah
dan
(21b) Sedangkan untuk (20c), turunan terhadap
merupakan konstrain (DP1) sendiri yaitu . (21c)
Dari Persamaan (21c) ini, akan lebih mudah untuk memperoleh nilai yaitu dengan menggunakan
. (22) Dengan mensubstitusikan Persamaan (22) ke Persamaan (21a) untuk
, maka akan diperoleh bentuk persamaan
, (23) dengan
,
, dan
Dengan menyelesaikan Persamaan (23), akan didapat nilai dari . Namun, matrik koefisien pada Persamaan (23) mempunyai ukuran sehingga tidak mempunyai invers. Penyelesaian ini dicari dengan menggunakan bantuan Matlab.
Selanjutnya, selesaian dari Persamaan (23) disubstitusikan ke Persamaan (21b) untuk sehingga diperoleh kontrol yang optimal. Dapat dilihat dari Persamaan (21b), bentuk kontrol optimal bergantung pada besarnya parameter regulasi . Sehingga dengan analisis beda hingga ini, tidak bisa ditentukan besarnya yang menyebabkan kontrol menjadi optimal. Jadi, untuk mengetahui kontrol optimal dari masalah kontrol optimal pada penelitian akan dikerjakan dengan mengimplementasikan permasalahan ini dalam program Matlab.
3.6 Hasil Simulasi
Untuk mengetahui pengaruh dari nilai parameter dan banyaknya diskritisasi, maka permasalahan kontrol optimal diselesaikan dengan menggunakan Matlab terlebih dahulu. Berikut diberikan satu contoh kasus dengan dua nilai parameter regulasi yang berbeda dan banyaknya diskritisasi yang berbeda. Contoh kasus yang diambil pada bagian ini adalah
−
Δ
T
=
6
padaΩ
1 (24)0
)
.
(
2
Δ
+
∇
=
−
T
u
T
padaΩ
2 (25) dengan syarat batasT = g pada
Γ
c (26)0
=
∂
∂
n
T
padaΓ
1∪
Γ
2∪
Γ
3∪
Γ
4∪
Γ
o (27) Sedangkan kecepatan u pada Persamaan (25) merupakan penyelesaian dari persamaan Navier-Stokes yaitu0
)
.
(
∇
+
∇
=
+
Δ
−
v
u
u
u
p
padaΩ
2 (28) konstrain incompressible :∇
u = 0 padaΩ
2 (29)u = h pada
Γ
c (30) u = 0 padaΓ
w∪
Γ
4 (31)0
=
∂
∂
n
u
padaΓ
o (32) Jika diberikanh
=
(
2
y
2+
1
.
5
y
,
0
)
padaΓ
c dan u=(u1,u2) maka dengan syarat batas (29) penyelesaian dari u adalah(
2
y
21
.
5
y
,
0
)
u
=
+
. Sedangkan temperatur yang diharapkan adalah 1.2.Berikut ini diberikan beberapa pemgambilan nilai parameter regulasi dan banyaknya diskritisasi.
1. =0.01
Jika domain permasalahan didiskritisasi menjadi , dengan maka distribusi temperatur diberikan oleh Gambar 4.
Dari Gambar 4. ini, kontrol sepanjang
dan temperatur sepanjang interface
bisa dinyatakan dalam grafik dua dimensi. Untuk grafik temperatur interface, sumbu x menyatakan posisi dari setiap node pada interface. Begitu pula dengan grafik kontrol, sumbu y menyatakan posisi dari setiap node kontrol.
Gambar 5. Bentuk kontrol optimal dengan diskritisasi domain
Dari Gambar 6. dapat dilihat bahwa temperatur sepanjang interface sudah mendekati temperatur yang diinginkan. Sebagai perbandingan maka dengan nilai parameter regulasi yang sama, domain didiskritisasi menjadi
dengan . Berikut ini adalah distribusi temperatur sepanjang interface.
Gambar 6. Temperatur pada interface dengan diskritisasi dom
ain
Gambar 4 Distribusi Temperatur dengan diskritisasi domain
Gambar 7. Temperatur pada interface dengan diskritisasi domain
Dari Gambar 7. dapat dilihat perbedaan antara domain dengan diskritisasi
dan domain dengan diskritisasi . Dengan diskritisasi , temperatur sepanjang interface juga mendekati temperatur yang diharapkan.
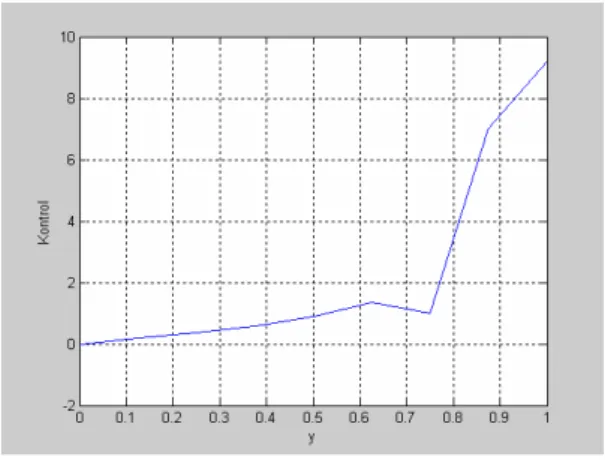
2. = 0.00001
Selanjutnya, diambil parameter regulasi yang lebih kecil dari =0.01 untuk mengetahui pengaruh terhadap perubahan temperatur sepanjang interface. Sama halnya dengan sebelumnya, domain didiskritisasi menjadi dan . Grafik kontrol dan perubahan temperatur pada interface diberikan berikut ini
Berbeda dengan =0.01, besarnya kontrol dengan parameter =0.00001
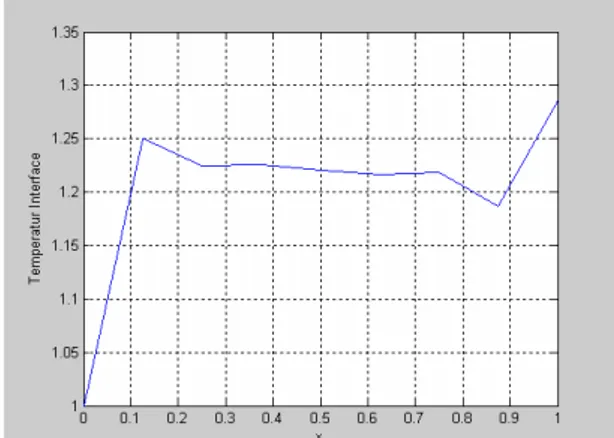
naik secara signifikan, meskipun begitu besarnya kontrol ini tidak mengubah perubahan temperatur sepanjang interface yang diberikan pada Gambar berikut ini. Akan tetapi besarnya kontrol akan mempengaruhi total fungsional biaya. Semakin besar kontrol, maka semakin besar pula total fungsional biaya.
Gambar 9. Temperatur sepanjang interface dengan diskritisasi domain
Selanjutnya jika domain didiskritisasi menjadi maka bentuk kontrol dan temperatur sepanjang interface diberikan pada Gambar berikut.
Gambar 4.8. Kontrol pada dengan
diskritisasi domain Gambar 10. Kontrol pada dengan
diskritisasi domain
Dari diskritisasi ini juga terlihat bahwa besarnya kontrol mengalami kenaikan yang cukup signifikan. Meskipun begitu, temperatur sepanjang interface mempunyai distribusi temperatur yang sama dengan = 0.01. Distribusi temperatur tersebut diberikan pada Gambar berikut.
Jadi, dari hasil simulasi diatas, dapat diketahui bahwa besarnya parameter regulasi berpengaruh pada besarnya kontrol tetapi tidak berpengaruh pada distribusi temperatur sepanjang interface. Akibatnya, akan mempengaruhi total fungsional biaya. Sedangkan banyaknya diskritisasi lebih berpengaruh pada distribusi temperatur sepanjang interface .
4. KESIMPULAN
Berdasarkan uraian dari bab terdahulu, dapat diambil kesimpulan sebagai berikut:
1. Dengan metode beda hingga, kontrol optimal untuk masalah temperatur fluida didalam suatu kontainer diberikan oleh persamaan berikut dengan kontrol diletakkan sepanjang sumbu
dan
dengan , dan diketahui.
2. Dari hasil simulasi diperoleh bahwa perubahan parameter regulasi δ sangat mempengaruhi besarnya kontrol sehingga mempengaruhi total dari cost function sedangkan banyaknya diskritisasi pada domain tidak banyak mempengaruhi total
cost function.
5.DAFTAR PUSTAKA
1. Coddington, E.A dan Levinson, N., 1980, Theory of Ordinary
Differential Equations.
McGraw-Hill Inc, New York.
2. Desieni, S.N, 2002, Optimal Control
Systems, CRC Presses LCC, USA
3. Dorf, R.C, (1989,) Modern Control
System, Addison Wesley
Publishing Company, Inc,California
4. Naidu,D.S, (2003),Optimal Control
Systems,CRC Press, Florida
5. Pinch, E. R. 1993. Optimal Control
and The Calculus of Variations. Oxford
University Press Inc., New York.
6. Segerlind, L. J, (1984), Applied
FiniteElement Analysis,
John Wiley and Sons, Inc, New York
7. Shenoy, A. R, Cliff, E.M, Heinkenschloss, M. 1996.
Thermal Fluid-Control via Finite-Dimensional
Gambar 11. Distribusi temperatur pada dengan diskritisasi domain
Approximation. Journal of
Thermophysics 96-1910. 8. Smith, G.D. 2005. Numerical
Solution of Partial Differential Equations.