1 mendefinisikan fotogrametri sebagai seni, ilmu dan teknologi mengenai informasi terpercaya tentang objek fisik dan lingkungan melewati proses perekaman, pengukuran dan interpretasi gambar fotografi dan pola dari dari perekaman radiasi energi gelombang elektromagnetik dan fenomena lainnya. Fotogrametri dapat dibagi menjadi beberapa macam jenis, salah satunya adalah fotogrametri jarak dekat atau dikenal dengan istilah close range photogrammetry. Fotogrametri jarak dekat merupakan suatu teknik pengambilan data menggunakan kamera yang dekat dengan objek berjarak pengukuran, kurang dari 100 meter (Cooper dan Robson dalam Atkinson 1996).
Foto yang dihasilkan dari pemotretan fotogrametri diproses untuk menghasilkan sebuah model 3D. Salah satu faktor untuk mendapatkan hasil model 3D yang baik adalah teknik perekaman data. Model 3D yang baik membutuhkan teknik yang tepat dalam pengambilan data foto. Teknik perekaman data foto yang tepat dapat diketahui dengan menganalisis perbedaan cara pengambilan data foto menggunakan metode yang berbeda.
Penelitian ini mencoba membandingkan konfigurasi pemotretan pola Grid dan pola ROI (Region of Interest) menggunakan metode fotogrametri jarak dekat dengan target objek sederhana. Pada penelitian ini kamera yang digunakan adalah kamera non metrik. Hasil pengolahan data berupa model 3D yang dibandingkan dengan dimensi objek aslinya untuk mengetahui hasil akurasi dan kelengkapan model 3D. .Konfigurasi pemotretan pola grid merupakan konfigurasi pemotretan pola memanjang yang membentuk grid sedangkan pola ROI (Region of Interest) adalah pola berbentuk seperti lingkaran (Tim Map dan GIS, 2014). Beberapa faktor yang mempengaruhi akurasi pembentukan model 3D yaitu (Anonim, 2015):
1. Resolusi foto. Foto dengan resolusi yang tinggi, mampu menghasilkan akurasi yang tinggi karena lokasi objek dapat diketahui secara tepat.
Resolusi foto mendefinisikan kemampuan suatu kamera digital atau film scanner.
2. Kalibrasi kamera. Kalibrasi merupakan suatu proses penentuan panjang fokus kamera, principal point, dan distorsi lensa.
3. Sudut antara foto. Titik dan objek yang sama akan muncul jika pemotretan ditujukan pada objek dengan sudut yang kecil. Misalnya, suatu titik akan muncul jika dua foto dilakukan pemotretan dengan jarak yang dekat.
4. Kualitas orientasi foto. Kualitas orientasi foto merupakan faktor orientasi luar (exterior orientation). Salah satu faktor yang berpengaruh pada akurasi suatu objek adalah posisi setiap kamera yang teliti.
5. Redundansi foto. Sebuah titik atau posisi objek akan lebih teliti jika muncul pada banyaknya foto yang akan dilakukan proses, dibandingkan hanya dengan dua foto.
6. Target. Posisi foto lebih mudah diidentifikasi jika menggunakan target. Ketelitian titik 3D akan tepat jika lokasi pada setiap foto saling terikat.
I.2. Rumusan Masalah
Pola konfigurasi pemotretan fotogrametri jarak dekat berpengaruh pada hasil akurasi model 3D. Konfigurasi pola pemotretan terkait dengan B/ H rasio. Pola pemotretan data foto terdapat berbagai macam pilihan, diantaranya pola Grid dan pola ROI (Region of Interest). Penelitian ini membandingkan pemotretan pola Grid dan pola ROI untuk mengetahui akurasi model 3D dan kepraktisan di lapangan.
I.3. Pertanyaan Penelitian
1. Apakah perbedaan konfigurasi pemoretan berpengaruh pada hasil akurasi? 2. Manakah pola konfigurasi pemotretan yang lebih baik untuk menghasilkan
I.4. Cakupan Penelitian Penelitian ini memfokuskan pada masalah
1. Pemodelan tiga dimensi dengan target objek sederhana.
2. Metode pengambilan data menggunakan metode Grid dan ROI (Region of Interest).
3. Model 3D terbentuk secara otomatis dengan menggunakan software tanpa pemodelan dengan menggunakan AutoCAD.
4. Analisis ketelitian berdasarkan hasil skala bentuk dan dimensi pengukuran bukan koordinat.
I.5. Tujuan Penelitian
Penelitian ini bertujuan untuk melakukan analisis perbandingan akurasi hasil pemodelan 3D antara pemotretan pola Grid dengan pola ROI (Region of Interest).
I.6. Manfaat Penelitian
Manfaat dari penelitian ini adalah mendapatkan hasil akurasi dan kelengkapan model 3D berdasarkan hasil dari konfigurasi pemotretan dengan pola yang berbeda. Pemilihan konfigurasi pola pemotretan yang tepat digunakan untuk kepraktisan di lapangan dalam pemodelan 3D objek tertentu seperti artefak, benda kuno atau bersejarah.
I.7. Tinjauan Pustaka
Tim Maps dan GIS (2014) melakukan penelitian mengenai foto udara menggunakan wahana UAV dengan objek daerah Papago untuk membandingkan penerbangan Grid dengan ROI (Region of Interest). Penelitian penerbangan Grid dan ROI dilakukan tiga kali penerbangan dengan ketinggian yang berbeda.
Penerbangan pertama pola ROI dengan tinggi terbang 50 meter menggunakan kamera GoPro yang terpasang pada sudut 45 derajat. Hasil pengolahan dengan Agisoft Photoscan menghasilkan geometri yang akurat sedangkan hasil foto dengan perangkat lunak 123D tidak akurat. Penerbangan kedua dengan ketinggian 100 meter. Hasil pemotretan penerbangan kedua diolah dengan menggunakan 123D menangkap detail permukaan yang sedikit dan menciptakan efek mangkok di tepi. Hasil pemrosesan foto dengan menggunakan Agisoft Photoscan berupa model
geometris yang akurat. Penerbangan ketiga adalah penerbangan grid dengan ketinggian 70 meter menggunakan kamera GoPro yang diposisikan menghadap lurus ke bawah. Foto penerbangan Grid diolah dengan 123D tidak dilakukan editing agar menghasilkan model 3D yang baik. Pengolahan foto dengan menggunakan Agisoft Photoscan menghasilkan model yang sangat akurat dengan distorsi yang lebih sedikit dibandingkan distorsi penerbangan lainnya.
Selain itu terdapat penelitian lain tentang fotogrametri jarak dekat namun tidak membahas tentang pola pemotretannya, diantaranya adalah Yilmaz (2008) yang meneliti tentang fotogrametri digital dengan objek kecil yang dimodelkan 3D. Objek yang digunakan merupakan objek kecil dengan bentuk yang tidak biasa. Pada area penelitian terdapat beberapa titik kontrol pengukuran. Objek target di potret dengan kamera digital lalu dikalkulasikan untuk mengetahui parameter kamera. Parameter kamera dibutuhkan dalam orientasi fotogrametri dan perhitungan perataan.
Aguilar (2008) melakukan penelitian fotogrametri jarak dekat dengan memodelkan permukaan tanaman tomat. Tujuan dari penelitian adalah mengetahui volume berdasarkan kanopi Index of Area Leaf (LAI) yang merupakan rasio total permukaan daun dibagi dengan luas permukaan tanah yang ditumbuhi tanaman tomat. Volume tanaman tomat dapat diukur menggunakan data foto yang didapatkan dari pemotretan jarak dekat yang dibentuk model 3D. Dengan mengetahui volume tanaman tomat maka penyemprotan pestisida dilakukan secara merata ke seluruh kanopi tanaman untuk meminimalisir dampak buruk terhadap tanah dan lingkungan.
I.8. Landasan Teori I.8.1. Fotogrametri Jarak Dekat
Menurut Luhmann (2006) fotogrametri mengalami perkembangan yang sangat pesat dengan berbagai macam teknik pengambilan data. Fotogrametri dapat dibagi dalam berbagai macam kategori, diantaranya berdasarkan posisi kamera dan jarak objek, jumlah foto dari hasil pengukuran, metode perekaman dan pemrosesan, ketersediaan dari hasil pengukuran, aplikasi atau area khusus. Fotogrametri jarak
dekat termasuk dalam fotogrametri berdasarkan posisi kamera dan jarak objek. Fotogrametri jarak dekat adalah suatu teknologi pengukuran dengan mendapatkan data foto dari objek target untuk menghasilkan informasi spasial 3D. Potensi yang ada pada metode fotogrametri jarak dekat yaitu (Torlegard, 1980 dalam Kusumadarma, 2008):
1. Objek yang diukur didapatkan tanpa menyentuh objek tersebut. 2. Proses yang cepat dalam melakukan pengambilan data.
3. Penyimpanan data foto semantik dan metrik.
4. Dokumen data foto dapat digunakan sebagai bukti yang legal berkaitan dengan waktu.
5. Selain objek tetap dan rigid, dengan fotogrametri jarak dekat dapat melakukan perhitungan deformasi dan pergerakan.
6. Pengguna dapat melakukan evaluasi, pengulangan pengambilan data foto dan penambahan kapan saja sesuai dengan keinginan pengguna.
Moffit dan Mikhail (1980) menjelaskan bahwa fotogrametri terestris mempunyai prinsip kamera yang diletakkan di tanah. Fotogrametri terestris dapat dikelompokkan menjadi fotogrametri jarak dekat jika jarak obyek dengan kamera sekitar 0,1 m hingga 100 m. Kamera yang digunakan dalam fotogrametri terestris dibagi menjadi kamera metrik dan non metrik.
Metode pemotretan fotogrametri jarak dekat dapat dilakukan dengan berbagai macam pola diantaranya adalah pola Grid dan ROI (Region of Interest).
1.8.1.1 Pola Grid. Pola Grid merupakan suatu pola yang membentuk suatu persegi atau grid. Pengambilan data foto dengan pola Grid dilakukan secara berurutan pada objek target. Pemotretan dilakukan pada titik tertentu yang berurutan ke titik selanjutnya sehingga membentuk suatu garis dan garis yang saling berhubungan tersebut membentuk pola seperti persegi atau Grid (Tim Maps dan GIS, 2014). Bentuk pola Grid dapat dilihat pada gambar I.1.
Gambar I. 1 Pola Grid di area Papago dengan menggunakan wahana UAV ( Tim Map dan GIS, 2014 )
1.8.1.2 Pola ROI.Pola ROI (Region of Interest) merupakan pola yang berbentuk seperti lingkaran. Pada pola ROI, objek target berada di tengah dan dilakukan pengambilan data foto dengan jarak tertentu dari objek. Pemotretan dilakukan secara berurutan sehingga membentuk pola seperti lingkaran (Tim Maps dan GIS 2014). Bentuk pemotretan pola ROI dapat dilihat pada gambar I.2.
Gambar I. 2. Pola ROI (Region of Interest) area Papago dengan menggunakan wahana UAV (Tim Map dan GIS, 2014)
Klasifikasi kamera dalam fotogrametri secara garis besar dibagi menjadi dua, yaitu kamera metrik dan kamera non metrik. Penelitian ini menggunakan kamera non metrik dalam melakukan pengambilan data baik untuk pemotretan pola Grid maupun pola ROI. Kamera non metrik merupakan kamera yang berkualitas biasa yang digunakan oleh orang secara umum maupun profesional. Kamera non metrik tidak memiliki fokus yang tetap sehingga interior orientationnya tidak diketahui. Selain fokus kamera non metrik tidak tetap, kamera non metrik tidak memiliki fiducial mark sehingga dalam penggunaannya perlu dilakukan kalibrasi kamera (Moffit dan Mikhail, 1980).
Kamera non metrik pada dasarnya tidak didesain untuk tujuan fotogrametri namun dengan memperhatikan parameter dalam kaidah fotogrametri, kamera non metrik dapat digunakan untuk tujuan fotogrametri. Kamera non metrik memiliki keunggulan dalam memfokuskan jarak secara fleksibel sehingga dapat dengan cepat menyelesaikan suatu rangkaian pemotretan. Selain itu, harga kamera non metrik lebih terjangkau dibandingkan kamera metrik (Karara, 1989).
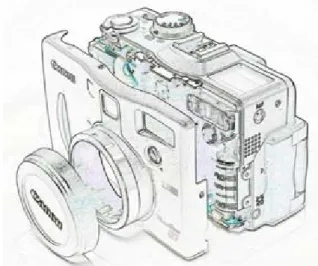
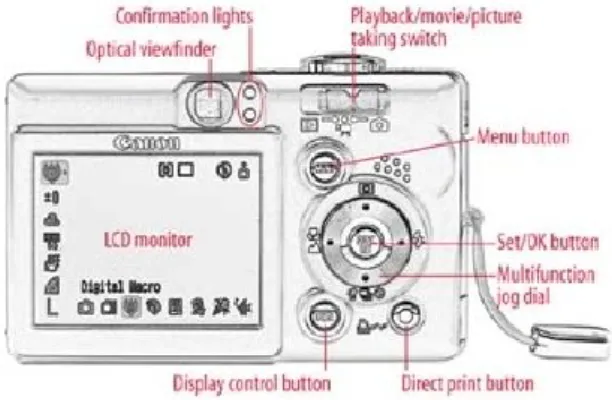
Kamera non metrik dibagi dalam berbagai macam tipe salah satunya adalah kamera digital yang digunakan dalam penelitian ini. Prinsip kamera digital adalah cahaya masuk melalui lensa yang bentuk obyeknya ditangkap oleh sensor kamera dan disimpan dalam memori kamera. Geometri kamera saku digital dapat dilihat pada gambar I.3, sedangkan bagian belakang kamera saku digital dapat dilihat pada gambar I.4.
Gambar I. 4. Bagian belakang kamera saku digital (Story, 2005) I.8.2. Ground Sampling Distance
Harjanto (2012) menyatakan bahwa ground sampling distance merupakan ukuran paling kecil dari objek. Panjang dan lebar sensor kamera mempengaruhi luas cakupan yang terekam dan pertampalan berdasarkan perhitungan panjang basis udara. Nilai GSD foto udara dirumuskan sebagai berikut:
GSD = CCD / CMOS x aSf ………...…...I.1. atau, GSD = CCD/ CMOS x (Hrata-rata/ f )………....I.2. yang merupakan,
aSf : angka skala foto CCD/ CMOS : ukuran sensor
Hrata-rata : rata-rata tinggi terbang
f : fokus kamera
1.8.2.1 Resolusi piksel. Tingkat kehalusan suatu foto dipengaruhi oleh jumlah piksel dalam sensor. Piksel merepresentasikan titik paling kecil dalam suatu gambar grafis yang dihitung per inci. Rumus resolusi piksel adalah
Sensor kamera analog adalah plat film sedangkan pada kamera digital menggunakan plat CCD (Charge Couple Device) atau CMOS (Complementary Metal Oxide Semiconductor). Ukuran sensor kamera yang digunakan pada tiap kamera tidak sama. Penelitian ini menggunakan kamera digital dengan sensor kamera bertipe CCD.
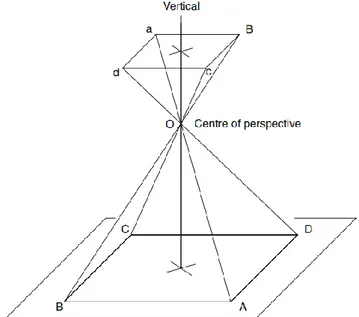
1.8.2.2 Skala foto. Skala foto adalah perbandingan antara jarak objek pada foto dengan objek sebenarnya yang sama. Perbandingan panjang fokus kamera dengan tinggi terbang disebut juga sebagai skala foto. Bentuk geometri foto udara tegak dapat dilihat pada gambar I.5.
Gambar I. 5.Geometri foto udara tegak antara objek dengan foto (Wolf, 1983) Skala rata-rata = f / H rata-rata
Keterangan:
f : panjang fokus kamera H rata-rata : rata-rata tinggi terbang I.8.3. Model 3D
Model 3D dalam komputer grafis merupakan representasi secara matematis dari objek 3D yang dalam pembuatannya dibantu perangkat lunak khusus pemodelan 3D. Proses menampilkan model 3D sebagai gambar dua dimensi disebut e-3D render atau menggunakan simulasi komputer dalam menampilkan model
fisiknya (Yilmaz, 2000). Beberapa faktor yang mempengaruhi akurasi pembentukan model 3D yaitu (Anonim, 2015):
1. Resolusi foto. Foto dengan resolusi yang tinggi, mampu menghasilkan akurasi yang tinggi karena lokasi objek dapat diketahui secara tepat. Resolusi foto mendefinisikan kemampuan suatu kamera digital atau film scanner.
2. Kalibrasi kamera. Kalibrasi merupakan suatu proses penentuan panjang fokus kamera, principal point, dan distorsi lensa.
3. Sudut antara foto. Titik dan objek yang sama akan muncul jika pemotretan ditujukan pada objek dengan sudut yang kecil. Misalnya, suatu titik akan muncul jika dua foto dilakukan pemotretan dengan jarak yang dekat.
4. Kualitas orientasi foto. Kualitas orientasi foto merupakan faktor orientasi luar (exterior orientation). Salah satu faktor yang berpengaruh pada akurasi suatu objek adalah posisi setiap kamera yang teliti.
5. Redundansi foto. Sebuah titik atau posisi objek akan lebih teliti jika muncul pada banyaknya foto yang akan dilakukan proses, dibandingkan hanya dengan dua foto.
6. Target. Posisi foto lebih mudah diidentifikasi jika menggunakan target. Ketelitian titik 3D akan tepat jika lokasi pada setiap foto saling terikat
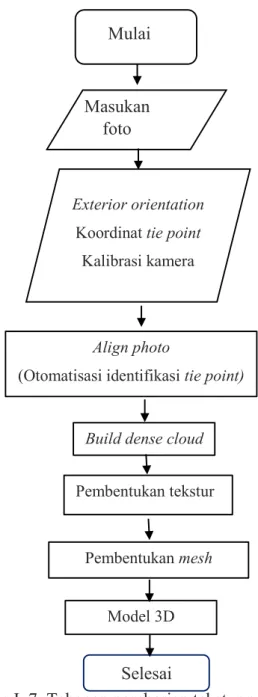
Aristia (2014) menjelaskan bahwa tujuan akhir dari pengolahan data fotogrametri jarak dekat adalah membentuk model 3D bertekstur yang terdiri dari empat tahap utama.
1.8.3.1. Tahap alignment.Tahap ini diawali dengan proses image matching dengan cara mengetahui posisi kamera pada setiap gambar. Parameter kalibrasi kamera perlu dimasukkan untuk menghilangkan efek distorsi pada foto agar sparse point cloud dan formasi posisi kamera dari data foto dapat terbentuk. Sparse point cloud adalah hasil penyelarasan dari beberapa data foto yang dapat sehingga dapat digunakan pada software lain.
1.8.3.2. Tahap membangun dense point cloud. Metode ini dense point cloud merupakan metode semi-otomatis untuk memodelkan objek yang memiliki tekstur. Dense point cloud mampu menghasilkan point cloud yang sangat kecil dan rapat. Pembentukan model 3D menghasilkan bentuk yang sesuai dengan keadaan atau objek yang sebenarnya. Pemrosesan data foto pada metode dense point cloud ini dilakukan secara stereo matching. Hasil point cloud yang terbentuk bergantung pada proses image matching area foto yang saling bertampalan.
1.8.3.3. Tahap membangun mesh. Poligon permukaan obyek terbentuk berdasarkan titik-titik dense point cloud. Poligon-poligon tersebut membentuk segitiga dan segiempat yang bergabung satu sama lain, sehingga membentuk suatu permukaan obyek yang solid. Faces/ surface pada Agisoft PhotoScan merupakan suatu permukaan yang terbentuk dari poligon. Vertex merupakan titik-titik perpotongan antar poligon yang terbentuk dari minimal tiga atau lebih faces/ surface. Illustrasi face dan vertex penyusun permukaan model 3D disajikan pada gambar I.6.
Gambar I. 6.Face dan vertex penyusun permukaan model 3D
(http://www.curriculumsupport.education.nsw.gov.au/primary/mathematics/k6/tea ching/glossary.htm)
1.8.3.4. Tahap pemberian tekstur pada objek. Tekstur pada objek terbentuk dengan cara memanggil tekstur dari foto aslinya atau memberikan tekstur yang tersedia dalam software pengolahan data. Tahap pemberian tekstur pada objek dapat dilihat pada gambar I.8.
Gambar I. 7. Tahapan pemberian tekstur pada objek I.8.4. DEM (Digital Elevation Model)
Model 3D terbentuk dari DEM yang dihasilkan dari pertampalan data foto dari pengambilan data terestris fotogrametri jarak dekat pola Grid dan ROI (Region of Interest). Egels dan Kasser (2002) menyatakan bahwa DEM merupakan representasi secara digital dan matematis dari sebuah objek yang dimodelkan beserta lingkungan disekitarnya. DEM yang menyajikan informasi elevasi tanah disebut sebagai DTM (digital terrain model). Informasi yang berisi tentang elevasi
Mulai
Masukan foto
Exterior orientation
Koordinat tie point Kalibrasi kamera
Build dense cloud Align photo
(Otomatisasi identifikasi tie point)
Pembentukan mesh Pembentukan tekstur
Model 3D
setiap titik tanah maupun area di atas tanah disebut sebagai DSM (digital surface model) atau model permukaan digital. Representasi model 3D dibagi menjadi 3 jenis yaitu:
1.8.4.1. Grid raster biasa. Grid raster biasa sesuai untuk menggambarkan permukaan 2,5 D yang dapat dideskripsikan dengan fungsi matematis 3D yaitu z = f (x, y). Fungsi f dalam raster grid biasa merupakan asumsi untuk mendefinisikan suatu proyeksi jika fungsi matematis tersebut benar, sistem referensi kartesi koordinat 3D direpresentasikan dengan x dan y. Sebuah foto dari struktur grid raster biasa terdapat titik dari grid raster biasa tersebut dan nilai abu-abu dari pixel pada foto yang merepresentasikan elevasi.
1.8.4.2. Jaringan segitiga (TIN). Segitiga dapat dibentuk dari sampel yang terbatas untuk membentuk komponen planimetris dengan melakukan triangulasi 2D Delaunay. Titik-titik sampel membentuk jaringan segitiga sehingga menjadi suatu permukaan terrain. Bentuk permukaan terrain dipengaruhi titik-titik sampel yang digunakan dalam interpolasi.
1.8.4.3. Garis karakteristik permukaan. Suatu permukaan dideskripsikan dengan garis karakteristik dan garis kontur. Garis kontur didapatkan dari proses stereo plotting secara manual, analog, analitik, peralatan digital, terbentuk dari suatu grid biasa atau suatu model DSM jaringan segitiga, digitasi secara manual atau otomatis dari peta. Pembentukan permukaan dari garis kontur yang baik apabila permukaan terbentuk secara halus. Pemodelan permukaan menggunakan garis karakteristik permukaan merupakan pengurangan data dari permukaan yang sebenarnya.
Pengukuran pada objek model 3D dilakukan setelah model 3D terbentuk, kemudian objek model 3D dibandingkan dengan objek sebenarnya. Skala ukuran yang didapatkan dilakukan perhitungan nilai RMS dengan menggunakan rumus varian dan simpangan baku dari data populasi tersebut (Widjajanti, 2011).
𝜎
2=
∑(𝑥̅ −𝑥𝑖 )²𝑛 ……….. I.7.
sedangkan rumus simpangan bakunya,
σ
= √
∑(𝑥̅−𝑥𝑖 )²Keterangan:
𝜎
2 =varian populasiσ
= simpangan baku populasi𝑥
̅
= rata-rata data ukuran𝑥
𝑖= data ke-i
I.9. Hipotesis
Hipotesis yang digunakan dalam penelitian ini adalah hasil pemodelan 3D dari fotogrametri jarak dekat dengan konfigurasi kamera pemotretan pola ROI (Region of Interest) lebih baik akurasinya dan lebih lengkap model 3Dnya dibandingkan pemotretan pola Grid.