1
I.1 Latar Belakang
Waduk merupakan suatu kolam besar tempat menyimpan/menampung air ketika debit tinggi untuk digunakan pada debit rendah serta sebagai persediaan berbagai kebutuhan. Waduk buatan dibangun dengan cara membuat bendungan dan dialiri air sampai kapasitas tersebut penuh.
Pada pekerjaan pembangunan waduk diperlukan data primer dan data sekunder. Data primer merupakan data yang diperoleh dari hasil survei pengukuran, observasi lapangan dan analisa laboratorium. Sedangkan data sekunder merupakan data yang diperoleh dengan cara mengumpulkan data yang tersedia pada instansi-instansi. Kebutuhan data primer terutama data/informasi spasial diperlukan untuk memenuhi tahapan perencanaan dan pelaksanaan, sehingga pekerjaan pembangunan waduk dapat tepat sasaran dan efektif. Sebagaimana kemajuan di bidang ilmu dan teknologi yang semakin pesat, teknologi pemetaan pun sudah sedemikian berkembang, baik dalam teknik akuisisi data maupun proses pengolahan dan penyajiannya. Alat serta metode akuisisi data dapat dipilih dengan mempertimbangkan berbagai aspek, salah satunya terkait dengan obyek atau daerah yang akan dipetakan
Metode pengumpulan data spasial dalam pekerjaan pembangunan waduk dapat dilakukan dengan menggunakan teknologi Electronic Total Station (ETS) maupun 3D Laser Scanner, dengan memberikan ketelitian yang tinggi, namun kedua teknologi tersebut membutuhkan biaya yang sangat mahal dan waktu yang relatif lama. Sehingga diperlukan suatu metode alternatif yang dapat digunakan dengan ketelitian baik, biaya yang murah dan waktu yang relatif cepat, yaitu menggunakan metode fotogrametri jarak dekat secara aerial.
Fotogrametri jarak dekat merupakan suatu teknik pengukuran tiga dimensi tanpa kontak langsung dengan obyek dan menggunakan kamera untuk mendapatkan geometri obyek (Cooper & Robson, 1996). Salah satu cara pengambilan data pada fotogrametri jarak dekat yaitu pengambilan foto secara aerial, menggunakan wahana udara tanpa awak dan kamera format kecil (non metrik) sebagai instrumen pemotretan
udara. Pemanfaatan wahana udara tanpa awak sebagai wahana pembawa kamera telah banyak diaplikasikan pada beberapa pekerjaan, antara lain digunakan dalam pekerjaan desain jalur kereta api, jalan, perkebunan, pertambangan, konstruksi.
Pada era globalisasi ini, perkembangan teknologi wahana udara tanpa awak di Indonesia mengalami kemajuan yang cukup tinggi. Hal tersebut dapat dilihat dengan kehadiran beberapa produk wahana udara tanpa awak yang beredar dan digunakan oleh instansi pemerintah maupun swasta. Salah satu produk wahana udara tanpa awak yang sedang berkembang di Indonesia adalah Aibotix. Aibotix merupakan perusahaan produsen/pengembang wahana udara tanpa awak tipe multicopter yang berasal dari Jerman dan tergabung dalam salah satu bagian dari perusahaan Hexagon group.
Kegiatan aplikatif ini dilakukan untuk mengetahui pemanfaatan wahana udara tanpa awak Aibotix yang digunakan dalam pekerjaan pembangunan waduk. Pekerjaan pembangunan waduk dengan area yang relatif luas membutuhkan metode alternatif ini, sehingga dapat menghasilkan model yang dapat merepresentasikan bentuk/dimensi, model elevasi digital dan dapat menyajikan model genangan air waduk serta mengetahui kapasitas volume air waduk. Kegiatan aplikatif ini diharapkan dapat memenuhi kebutuhan data spasial yang dibutuhkan pada tahap perencanaan dan pelaksanaan pembangunan waduk Bajulmati, Banyuwangi, Jawa Timur.
I.2. Lingkup Kegiatan
Agar tidak menyimpang dari permasalahan dan dapat mencapai sasaran yang diharapkan, maka lingkup kegiatan pada kegiatan aplikatif ini sebagai berikut:
1. Kegiatan aplikatif ini dibatasi pada Area Of Interest seluas 150 ha di waduk Bajulmati.
2. Teknik pengumpulan data foto udara dengan menggunakan wahana udara tanpa awak Aibotix.
3. Data Ground Control Point sudah ada hasil survei GPS dengan metode RTK radio menggunakan GPS geodetik Leica GS10 dan Leica GS14. 4. Model elevasi digital yang digunakan adalah model permukaan digital. 5. Pemodelan area genangan dan perhitungan volume air waduk diperoleh
I.3. Tujuan
Kegiatan aplikatif ini bertujuan untuk melakukan pemodelan waduk Bajulmati dengan menggunakan wahana udara tanpa awak Aibotix.
I.4. Manfaat
Manfaat yang diharapkan dari kegiatan aplikatif ini adalah sebagai berikut: 1. Dapat menghasilkan orthophoto, model 3D serta model elevasi digital
pada kawasan pembangunan waduk Bajulmati.
2. Dapat mengetahui model area genangan air waduk Bajulmati.
3. Dapat mengetahui kapasitas volume air pada Area Of Interest pemotretan udara.
I.5. Landasan Teori 1.5.1. Waduk
Waduk adalah tampungan untuk menyimpan air pada waktu kelebihan agar dapat dipakai pada waktu diperlukan (Soedibyo, 2003:7). Waduk Bajulmati merupakan waduk serbaguna (multipurpose dam) dan mempunyai tipe bendungan berupa center core rock fill dam. Waduk tipe serbaguna merupakan waduk yang dibangun untuk memenuhi beberapa tujuan. Tujuan pembangunan waduk Bajulmati adalah sebagai penyedia air baku untuk air bersih, irigasi, pembangkit micro hydropower, pengembangan wisata pada kompleks hutan taman nasional Baluran, perikanan dan konservasi air. Bendungan tipe center core rockfill dam merupakan bendungan tipe urugan batu dengan inti kedap air, yang dibangun dari hasil penggalian bahan (material) sebagai bahan pembentuk bangunan asli, tanpa tambahan bahan lain yang bersifat campuran secara kimiawi.
Perencanaan bendungan memerlukan langkah-langkah yang matang mulai pengumpulan data sampai perencanaannya. Langkah awal yang dilakukan adalah adalah survei pendahuluan untuk mendapatkan data-data dasar mengenai kondisi lokasi daerah proyek dalam bentuk data teknis dan non teknis. Data-data hasil survei diteliti dan dianalisis untuk mendapatkan informasi teknis sebagai data masukan dalam perencanaan konstruksi bendungan. Perencanaan juga mempertimbangkan
faktor-faktor non teknis. Hasil perencanaan dalam bentuk dimensi konstruksi dan hidrolik ditransformasikan ke dalam bentuk gambar. Selanjutnya, dijadikan dasar untuk perhitungan estimasi biaya dan analisa ekonominya. Pelaksanaan pembangunan memerlukan jadwal kerja yang teliti dan mempunyai urutan-urutan yang efektif sehingga setiap komponen pekerjaan tidak saling tumpang tindih. Tahapan umum dalam perencanaan pembuatan bendungan/waduk yaitu :
1. Studi kelayakan pendahuluan (pre feasibility study) 2. Studi kelayakan (feasibility study)
3. Perencanaan tekis (detailed design) 4. Pelaksanaan pembangunan (construction)
Dalam hal tersebut, bidang ilmu geodesi dan geomatika diperlukan sebagai penyedia data-data dasar, antara lain: peta topografi, peta udara.
1.5.2. Fotogrametri Digital
1.5.2.1. Definisi
Era digital semakin meluas sejak teknologi komputerisasi mengalami perkembangan yang cepat. Teknologi telah mengubah sistem analog menjadi digital dalam banyak bidang terutama untuk aplikasi fotogrametri jarak dekat dan satelit fotogrametri. Pekerjaan yang fleksibel dan ekonomis menjadi unsur utama keterlibatan sistem digital dalam aplikasi fotogrametri jarak dekat. Beberapa keuntungan menggunakan foto digital (Atkinson 1996):
1. Foto digital dapat ditampilkan dan diolah menggunakan komputer (tidak perlu alat optis ataupun mekanis).
2. Sistem pengolahannya stabil.
3. Penajaman gambar dapat dilakukan. 4. Automatisasi dapat dilakukan.
Penggunaan kamera digital erat kaitannya dalam perkembangan era digital dan keekonomisannya untuk aplikasi fotogrametri jarak dekat. Kamera digital merupakan salah satu jenis kamera non-metrik yang sering digunakan untuk berbagai kepentingan. Kamera digital mamiliki komponen utama yang terdiri atas lensa, sensor, dan media penyimpanan. Kamera ini memiliki karakteristik desain yang berbeda dengan kamera analog. Perbedaan utamanya ialah pada media film seluloid yang diganti oleh sensor
optik elektrik seperti Charge–Couple Device (CCD) atau Complementary Metal Oxide Semiconductor (CMOS). CCD berfungsi mengubah photo yang jatuh mengenai permukaan sensor menjadi elektron yang selanjutnya elektron ini diakumulasikan ke dalam kapasitor dan diubah menjadi bentuk sinyal elektronik. CCD memiliki keunggulan di mana sensor lebih peka terhadap cahaya sehingga pada kondisi redup tanpa bantuan flash masih bisa menangkap obyek dengan baik. Semakin banyak piksel yang terdapat di dalam sensor, maka resolusinya semakin tinggi. Konsekuensi yang ditimbulkan ialah media penyimpanannya memerlukan kapasitas yang lebih besar (Suharsana 1997).
Kamera digital juga dilengkapi dengan Liquid Crystal Display (LCD), yaitu layar monitor mini yang digunakan untuk melihat secara langsung hasil pemotretan yang dilakukan. Adanya LCD ini dapat membantu pengguna untuk memilih dan mengatur menu secara interaktif, serta apabila hasil pemotretan kualitasnya kurang baik, maka dapat langsung dihapus, kemudian dilakukan pemotretan ulang. Terdapat sebuah istilah yang dikenal dengan nama ppi (pixel per inch) pada kamera digital. Ppi menunjukkan jumlah piksel per inchi linear dalam sebuah foto. Resolusi foto tidak dapat dipisahkan dengan ppi. Semakin besar ppi maka jumlah piksel per satuan inchinya semakin banyak, sehingga obyek pada foto akan semakin jelas atau resolusi fotonya baik.
1.5.2.2. Prinsip dasar fotogrametri
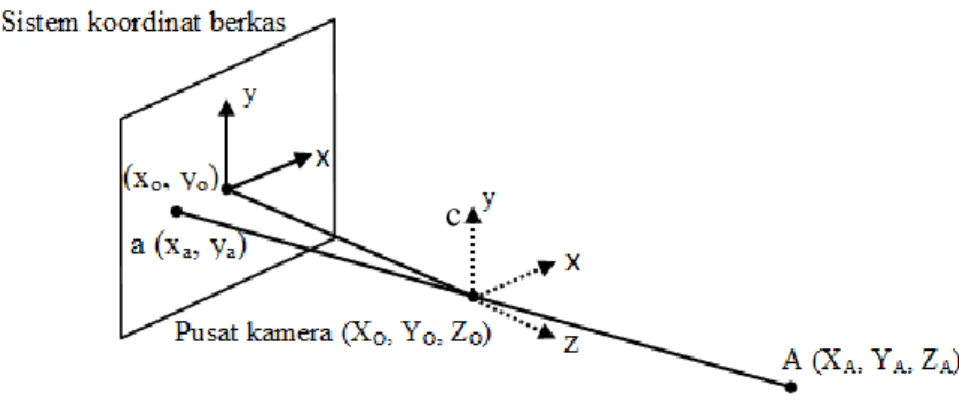
Prinsip yang digunakan dalam fotogrametri secara umum adalah prinsip kolinearitas (kesegarisan) yang dapat didefinisikan bahwa titik utama kamera, koordinat titik pada foto, dan posisi 3 dimensi titik tersebut pada ruang berada pada satu garis lurus.
Gambar I. 1. Kondisi kolinearitas (Atkinson, 1996). c
Dalam fotogrametri, posisi dari sebuah obyek pada ruang didefinisikan pada sistem koordinat kartesian 3D. Pada awalnya, obyek didefinisikan pada sistem koordinat berkas. Kemudian dilakukan transformasi koordinat untuk mendapatkan koordinat obyek pada sistem koordinat tanah. Kedua sistem koordinat tersebut terdapat perbedaan orientasi dan skala, sehingga transformasi koordinat terdiri dari translasi, rotasi dan perubahan skala.
Pusat dari sistem koordinat berkas merupakan pusat dari lensa kamera (pusat perspektif). Titik pusat lensa kamera diketahui, sehingga berkas sinar dari obyek yang melewati pusat lensa kamera akan jatuh pada sebuah titik pada bidang foto yang dapat diketahui koordinat fotonya. Persamaan kolinearitas untuk titik obyek A dan titik a yang terlihat pada foto dapat ditulis dalam persamaan matriks sebagai berikut (Atkinson, 1996). [ 𝑥𝑎− 𝑥𝑜 𝑦𝑎− 𝑦𝑜 −𝑐 ] = 𝜇−1[ 𝑟11 𝑟12 𝑟13 𝑟21 𝑟22 𝑟23 𝑟31 𝑟32 𝑟33 ] [ 𝑋𝐴 − 𝑋𝑂 𝑌𝐴 − 𝑌𝑂 𝑍𝐴 − 𝑍𝑂 ]………(I.1) xa - xo= −𝑐 [𝑟11(𝑋𝑂 −𝑋𝐴 ) + 𝑟12(𝑌𝑂 − 𝑌𝐴) + 𝑟13( 𝑍𝑂−𝑍𝐴 )] [𝑟31(𝑋𝑂 −𝑋𝐴 ) + 𝑟32(𝑌𝑂 − 𝑌𝐴) + 𝑟33( 𝑍𝑂−𝑍𝐴 )]………(I.2) ya - yo = −𝑐 [𝑟21(𝑋𝑂 −𝑋𝐴 ) + 𝑟22(𝑌𝑂 − 𝑌𝐴) + 𝑟23( 𝑍𝑂−𝑍𝐴 )] [𝑟31(𝑋𝑂 −𝑋𝐴 ) + 𝑟32(𝑌𝑂 − 𝑌𝐴) + 𝑟33( 𝑍𝑂−𝑍𝐴 )] ………..(I.3)
Matriks R merupakan matriks rotasi : Rω = [ 1 0 0 0 cos 𝜔 sin 𝜔 0 − sin 𝜔 cos 𝜔 ]……….…….(I.4) Rφ = [ cos 𝜑 0 − sin 𝜑 0 1 0 sin 𝜑 0 cos 𝜑 ]……….…….(I.5) Rκ = [ cos κ sin κ 0 − sin κ cos κ 0 0 0 1 ]……….…….(I.6) R = RωRφRκ ……….……….(I.7)
Elemen dari matriks rotasi diberikan pada persamaan I.8 berikut.
[
cos 𝜔 . cos κ sin 𝜔 . sin 𝜑 . cos κ + sin 𝜔 . sin κ − cos 𝜔 . sin 𝜑 . cos κ + sin 𝜔 . sin κ cos 𝜔 . sin κ − sin 𝜔 . sin 𝜑 . sin κ + cos 𝜔 . cos κ cos 𝜔 . sin 𝜑 . cos κ + sin 𝜔 . cos κ
sin 𝜑 − sin 𝜔 . cos 𝜑 cos 𝜔 . cos 𝜑
]
……….(I.8) Keterangan :
xo, yo = koordinat titik pusat foto.
XA, YA, ZA =koordinat titik A di permukaan bumi. XO, YO, ZO =koordinat pusat kamera.
c = panjang fokus kamera. rij = elemen matriks rotasi.
Rω = matriks rotasi terhadap sumbu X. Rφ = matriks rotasi terhadap sumbu Y. Rκ = matriks rotasi terhadap sumbu Z. I.5.2.3. Kalibrasi kamera
Kalibrasi kamera adalah suatu proses yang sangat penting dalam pengukuran Fotogrametri. Kalibrasi kamera merupakan proses penentuan parameter orientasi dalam dari sebuah kamera. Sebuah kamera dikatakan telah terkalibrasi apabila parameter panjang fokus (fx, fy), principle point, dan distorsi lensa (K1, K2, K3, P1, P2) telah diketahui.
1. Panjang fokus
Panjang fokus adalah jarak tegak lurus antara titik pusat lensa (titik fokus) dengan bidang proyeksi kamera (CCD/CMOS) dalam kamera digital atau film dalam kamera analog. Nilai panjang fokus ini harus diketahui karena berhubungan dengan pengukuran obyek. Pada beberapa software pengolahan data, terdapat dua buah nilai panjang fokus hasil kalibrasi kamera yaitu panjang fokus dalam satuan panjang (mm) dan panjang fokus dalam piksel. Piksel pada sensor kamera non metrik kualitas rendah memiliki bentuk persegi panjang sehingga ukuran piksel ke arah x dan y berbeda, hal itu menyebabkan hasil dari kalibrasi kamera akan menyajikan nilai panjang fokus ke arah x (fx) dan panjang fokus ke arah y (fy) dalam satuan piksel. Panjang fokus fx sebenarnya merupakan hasil dari panjang fokus lensa f (dengan satuan milimeter) dan sx yaitu ukuran dari elemen individu sensor (dengan satuan piksel/milimeter), sama halnya dengan fy yang diperoleh dari panjang fokus lensa f dan sy.
Berkaitan dengan foto udara tegak dikenal dengan istilah principle distance yaitu jarak tegak lurus antara titik pusat kamera dengan foto. Jarak ini sama
dengan panjang fokus yang telah terkalibrasi dan dikoreksi antara pembesaran/pengurangan rasio dengan penyusutan film atau ekspansi. 2. Titik pusat foto/principle point
Principle point merupakan titik utama hasil proyeksi tegak lurus titik pusat perspektif (titik pusat proyeksi) pada bidang foto. Titik ini merupakan titik utama pada sistem koordinat foto.
3. Distorsi lensa
Distorsi menyebabkan tidak tepatnya proyeksi dari pusat perspektif lensa terhadap bidang foto sehingga letak proyeksinya tidak tepat pada pusat sistem koordinat foto. Distorsi merupakan ketidaksesuaian bentuk obyek yang ada di dunia nyata dengan bentuk obyek pada foto. Hal ini disebabkan karena lensa yang digunakan memiliki kualitas yang kurang baik sehingga terjadi perubahan arah sinar yang keluar dari lensa dan yang masuk menjadi tidak sejajar. Distorsi pada lensa meyebabkan kesalahan geometrik atau bentuk obyek pada foto, namun tidak mengurangi ketajamannya dari hasil pemotretan kamera. Kesalahan tersebut mengakibatkan adanya penyimpangan geometri pada foto dengan geometri obyek sebenarnya. Distorsi lensa dibedakan menjadi dua yaitu distorsi radial dan tangensial (Wolf, 1993).
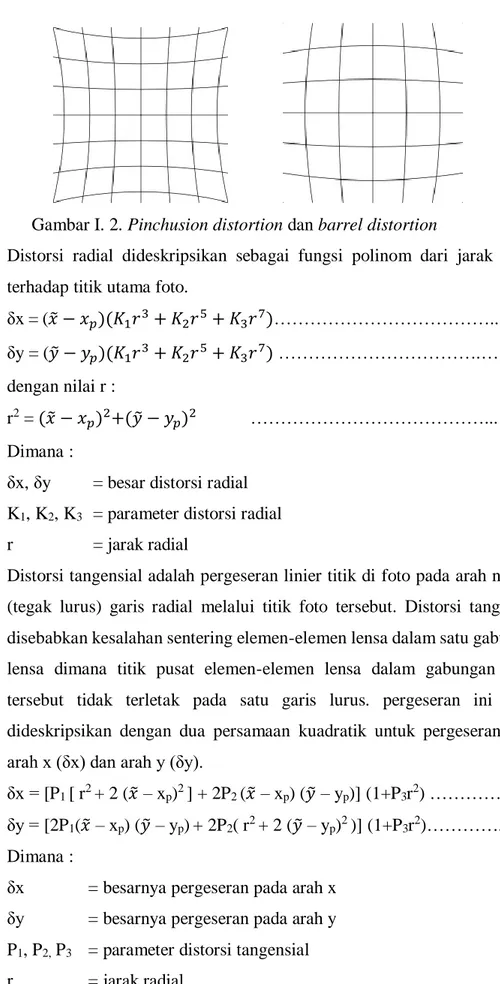
Distorsi radial adalah pergeseran linier titik foto dalam arah radial terhadap titik utama dari posisi idealnya. Distorsi lensa biasa diekspresikan sebagai fungsi polinomial dari jarak radial (Δr) terhadap titik utama foto. Distorsi radial ke arah luar dianggap positif dan ke arah dalam dianggap negatif. Distorsi radial ke arah dalam disebut sebagai pinchusion distortion, dan distorsi radial ke arah luar disebut barrel distortion. Perbedaan keduanya dapat dilihat pada Gambar I. 2.
Gambar I. 2. Pinchusion distortion dan barrel distortion
Distorsi radial dideskripsikan sebagai fungsi polinom dari jarak radial terhadap titik utama foto.
δx = (𝑥̃ − 𝑥𝑝)(𝐾1𝑟3+ 𝐾2𝑟5+ 𝐾3𝑟7)……….... (I.9) δy = (𝑦̃ − 𝑦𝑝)(𝐾1𝑟3+ 𝐾2𝑟5+ 𝐾3𝑟7) ……….… (I.10) dengan nilai r :
r2 = (𝑥̃ − 𝑥𝑝)2+(𝑦̃ − 𝑦𝑝)2 ………... (I.11) Dimana :
δx, δy = besar distorsi radial K1, K2, K3 = parameter distorsi radial r = jarak radial
Distorsi tangensial adalah pergeseran linier titik di foto pada arah normal (tegak lurus) garis radial melalui titik foto tersebut. Distorsi tangensial disebabkan kesalahan sentering elemen-elemen lensa dalam satu gabungan lensa dimana titik pusat elemen-elemen lensa dalam gabungan lensa tersebut tidak terletak pada satu garis lurus. pergeseran ini biasa dideskripsikan dengan dua persamaan kuadratik untuk pergeseran pada arah x (δx) dan arah y (δy).
δx = [P1 [ r2 + 2 (𝑥̃ – xp)2 ] + 2P2 (𝑥̃ – xp) (𝑦̃ – yp)] (1+P3r2) …………(I.12) δy = [2P1(𝑥̃ – xp) (𝑦̃ – yp)+ 2P2( r2 + 2 (𝑦̃ – yp)2 )] (1+P3r2)………….(I.13) Dimana :
δx = besarnya pergeseran pada arah x δy = besarnya pergeseran pada arah y P1, P2, P3 = parameter distorsi tangensial r = jarak radial.
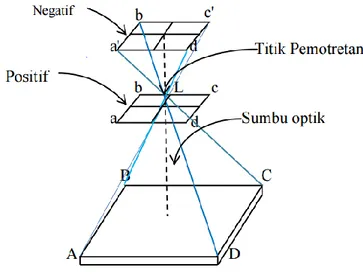
1.5.2.4. Geometri foto udara
Foto udara tegak adalah foto udara yang dibuat dari pesawat terbang dengan arah sumbu optik kamera tegak lurus atau mendekati tegak lurus. Idealnya sumbu optik kamera kalaupun mengalami kemiringan tidak lebih dari 1º. Hanya saja dalam kenyataan pekerjaan pemotretan banyak mengalami gangguan (getaran pesawat dan dorongan angin) menyebabkan terjadinya perubahan posisi pesawat, bagian depan pesawat terdorong ke atas dan mengalami pergeseran ke arah sumbu Y sehingga foto udara yang benar-benar vertikal tidak dapat diperoleh. Oleh karena itu masih terdapat toleransi terhadap kemiringan/kesendengan sumbu optik ini sampai dengan 3º, lebih dari angka ini foto udara dianggap sebagai foto udara condong (tilted photograph). Khusus untuk foto udara condong terdapat teknik dan formula untuk pengukuran tersendiri, yang berbeda dari formula yang digunakan pada foto udara tegak.
Gambar I. 3. Geometri sebuah foto udara tegak (Wolf, 1983)
Beberapa formula persamaan yang biasa digunakan untuk menganalisis dan menghitung berbagai aspek pada fotogrametri mengasumsikan bahwa foto udara benar-benar tegak, meskipun kenyataannya mungkin tidak benar-benar tegak. Asumsi lainnya yang dipakai untuk menganalisis koordinat foto udara adalah bahwa sistem sumbu koordinat mempunyai titik asal pada titik utama (principal point) foto udara dan bahwa semua koordinat telah dikoreksi terhadap penyusutan, distorsi lensa, distorsi pembiasan atmosfer, dan distorsi lengkungan permukaan bumi. Oleh karena itu dalam setiap pengukuran perlu kehati-hatian agar tidak keliru dalam menarik kesimpulan.
1.5.2.5. Ground Sampling Distance (GSD)
Ground Sampling Distance atau resolusi spasial adalah ukuran terkecil dari obyek yang terekam oleh kamera. Panjang dan lebar sensor kamera berpengaruh pada luas cakupan area yang terpotret. Panjang dan lebar sensor menentukan dalam perhitungan panjang basis udara untuk memperoleh pertampalan yang diinginkan. Ground Sampling Distance (GSD) juga dapat diartikan sebagai jarak di atas tanah yang diwakili tiap 1 piksel pada foto udara. Berikut ini rumus untuk memperoleh nilai GSD foto udara:
GSD = resolusi piksel x aSf ………...(I.14) atau,
GSD = ( l/jumlah piksel ) x ( Hrata-rata/f ) ...(I.15)
Keterangan :
aSf : angka skala foto l : ukuran lebar sensor Hrata-rata : Tinggi terbang rata – rata
f : fokus kamera
Penjelasan dari parameter rumus Ground Sampling Distance (GSD) sebagai berikut. 1. Resolusi piksel.
Piksel (dari bahasa picture element) merupakan unsur gambar atau representasi sebuah titik terkecil dalam sebuah gambar grafis yang dihitung per inchi. Jumlah piksel dalam sensor menentukan tingkat kehalusan foto atau resolusi yang dihasilkan. Resolusi piksel merupakan ukuran dari 1 buah piksel. Semakin kecil ukuran sebuah piksel semakin halus gambar yang dihasilkan. Rumus resolusi piksel adalah sebagai berikut.
Resolusi piksel = panjang sensor/jumlah piksel ……...……….... (I.16.) 2. Skala foto
Skala foto merupakan perbandingan antara jarak antar obyek di foto dengan jarak obyek yang sama di lapangan. Skala foto dapat juga berupa perbandingan antara panjang fokus kamera pemotretan dengan tinggi terbang wahana.
Skalarata−rata = 𝑓 𝐻
𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎
Keterangan :
f : panjang fokus kamera Hrata-rata : tinggi terbang rata-rata
3. Ukuran sensor kamera
Kamera analog menggunakan plat film sebagai sensor, sedang pada kamera digital sensor yang digunakan berupa plat CCD (Charge Coupled Device) ataupun CMOS (Complementary Metal Oxide Semiconductor). Ukuran sensor pada kamera digital non-metrik yang ada saat ini sangat beragam. 1.5.2.5. Parameter Orientasi Luar/External Orientation Parameter
Parameter orientasi luar dapat diperoleh dengan menggunakan 2 cara, yaitu cara pertama dengan proses restitusi foto, sedangkan cara kedua bundle adjustment atau triangulasi udara.
1. Orientasi pada foto udara
Kraus (2007) menyebutkan bahwa proses orientasi meliputi:
a. Model stereo dalam sistem koordinat 3D dibuat dari dua buah foto b. Setelah itu, model ditransformasikan ke dalam sistem koordinat 3D
(XYZ) dalam sistem koordinat tanah
Hubungan antara koordinat model (x, y, z) dengan koordinat tanah (X, Y, Z) dapat dijelaskan dalam persamaan (1.18) berikut.
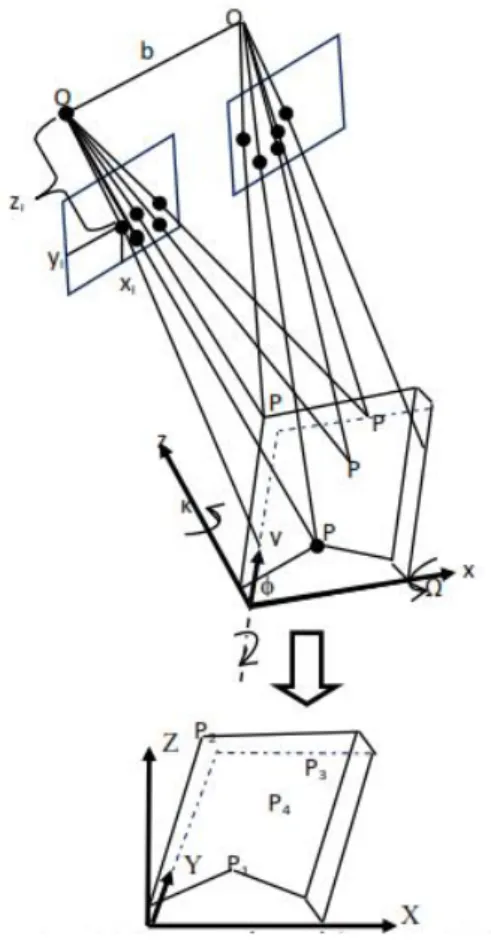
( 𝑋 𝑌 𝑍 ) = ( 𝑥𝑖 𝑦𝑖 𝑧𝑖 ) + 𝑚𝑅 ( 𝑥 𝑦 𝑧 ) ……… (I.18) Proses pembentukan model melalui dua buah foto dan transformasi sistem koordinat sebagi berikut.
Gambar I. 4. Proses orientasi foto Keterangan:
xi, yi, zi : oordinat pusat proyeksi kamera
x, y, z : koordinat obyek pada sistem koordinat model X, Y, Z : koordinat obyek pada sistem kordinat tanah m : skala pada sistem xyz
R : matriks rotasi 3D dalam sistem xyz ke sistem XYZ yang didefiniskan dalam Ω, φ, κ
P1, P2,..P4 : obyek di permukaan bumi
b : basis foto/jarak antara dua pusat foto yang bersebelahan O1, O2 : pusat proyeksi kamera
Ω : rotasi pada sumbu x foto φ : rotasi pada sumbu y foto κ : rotasi pada sumbu z foto
Santoso (2004) menyatakan bahwa Interior Orientation, Relative Orientation dan Absolute Orientation merupakan tahapan pembentukan
model 3D dari pasangan foto atau disebut dengan restitusi foto. Restitusi dapat diartikan sebagai pengembalian sesuatu yang hilang, atau rekonstruksi model (3D) dari pasangan foto (2D). Model ini kemudian digunakan sebagai panduan penurunan peta. Proses orientasi adalah sebagai berikut.
a. Dalam konteks fotogrametri, dikenal beberapa sistem koordinat yang berhubungan dengan foto udara, yaitu: sistem koordinat foto, sistem koordinat model, dan sistem koordinat peta/tanah. Sistem koordinat foto adalah sistem koordinat dua dimensi sebuah foto dengan titik originnya adalah titik perpotongan garis tepi (fiducial mark). Foto yang diperoleh dari pemotretan udara, baik yang menggunakan kamera digital maupun analog yang kemudian disiam, memiliki sistem koordinat piksel, sehingga perlu ditransformasi ke sistem koordinat foto. Transformasi dari sistem koordinat piksel ke sistem koordinat foto merupakan salah satu bagian tahapan dalam orientasi dalam. Model matematis untuk orientasi dalam adalah Affine 2D (Mensah, 1999 dalam Harintaka, 2008). Transformasi Affine 2D dirumuskan dalam persamaan (1.15) dan (1.16) berikut
x = a1 + a2u + a3v…...………..… (1.19) y = a4 + a5u + a6v……… (1.20) dalam hal ini a1, a2, a3, a4, a5, a6 merupakan parameter transformasi
yang terlebih dahulu ditentukan dengan menggunakan hasil pengukuran minimal 3 buah tanda tepi hasil kalibrasi kamera dengan posisinya dalam sistem koordinat piksel. Jika diketahui 4 atau lebih tanda tepi maka dengan persamaan (1.19) dan (1.20) dilakukan estimasi kuadrat terkecil.
b. Orientasi relatif yaitu dua berkas sinar yang sepadan/berpasangan dari proyektor kiri dan kanan. Bila minimal 5 pasang sinar berpotongan, maka seluruh pasangan sinar dari kedua berkas membentuk model 3D. Dengan cara digital, orientasi relatif menggunakan syarat kesebidangan (coplanarity).
c. Dalam orientasi absolut, model 3D relatif yang masih dalam sistem koordinat instrumen (sembarang) ditransformasikan ke dalam sistem definitif. Pada tahap ini diperlukan minimal 3 titik kontrol model. Secara analog, terhadap model relatif dilakukan penyekalaan dan pendataran. Bila dilakukan secara numerik, maka yang digunakan rumus yang digunakan adalah transformasi sebangun 3D.
2. Bundle Block Adjustment
Bundle Adjustment merupakan persamaan baku yang dapat diaplikasikan untuk beberapa orientasi fotogrametri dan masalah penentuan titik. (Konecny, 2003 dalam Tanjung, 2006).
Prinsip bundle adjustment adalah menggunakan inverse persamaan (I.18) yang dimodifikasi untuk menunjukkan koordinat foto merupakan fungsi dari koordinat peta, sebagaimana ditunjukkan persamaan (I.21) dengan r11,……, r33 merupakan fungsi rotasi terhadap sumbu X,Y,Z. Pembentukan matriks R atau RT (transpose matriks R) dapat dilihat secara detail pada Kraus (1994), Morgan (2004) dan Wolf (1983). Persamaan konform tiga dimensi yang terbentuk dalam rumus (I.21) :
( 𝑥𝑝 𝑦𝑝 𝑧𝑝) = 1 𝜆( 𝑟11 𝑟21 𝑟31 𝑟12 𝑟22 𝑟32 𝑟13 𝑟23 𝑟33 ) [ 𝑋𝑝 − 𝑋𝑜 𝑌𝑝 − 𝑌𝑜 𝑍𝑝 − 𝑍𝑜 ]………...……… (I.21) Untuk menunjukkan bahwa posisi sebuah obyek yang berada di foto, di permukaan tanah dan pusat proyeksi berada dalam satu garis lurus maka dapat dibangun sebuah persamaan kolinier atau persamaan kesegarisan, yaitu dengan cara membagi baris ke-1 dan baris ke-2 dengan baris ke-3, sehingga diperoleh persamaan (I.22) dan (I.23) :
𝑥𝑝 = −𝑓𝑟₁₁(𝑥𝑝−𝑥𝑜)+𝑟₂₁(𝑦𝑝−𝑦𝑜)+𝑟₃₁(𝑧𝑝−𝑧𝑜)
𝑟₁₃(𝑥𝑝−𝑥𝑜)+𝑟₂₃(𝑦𝑝−𝑦𝑜)+𝑟₃₃(𝑧𝑝−𝑧𝑜)……….... (I.22) 𝑦𝑝 = −𝑓𝑟₁₂(𝑥𝑝−𝑥𝑜)+𝑟₂₂(𝑦𝑝−𝑦𝑜)+𝑟₃₂(𝑧𝑝−𝑧𝑜)
𝑟₁₃(𝑥𝑝−𝑥𝑜)+𝑟₂₃(𝑦𝑝−𝑦𝑜)+𝑟₃₃(𝑧𝑝−𝑧𝑜)……...………...… (I.23) Persamaan (I.21) dan (I.22) merupakan persamaan non linear dan masih memiliki enam parameter yang belum diketahui nilai Xo, Yo, Zo, ω,φ,κ. Karena persamaan tersebut bukan merupakan persamaan liner maka dilakukan proses linearisasi dengan menggunakan deret Taylor yaitu
dengan menurunkan persamaan ke masing-masing parameter, sehingga diperoleh persamaan (I.23) dan (I.24) :
𝑥𝑝 = (𝑥𝑝)𝑜 + 𝛿𝑥𝑝 𝛿𝑥𝑜𝛿𝑥𝑜 + 𝛿𝑥𝑝 𝛿𝑦𝑜𝛿𝑥𝑜 + 𝛿𝑥𝑝 𝛿𝑧𝑜𝛿𝑥𝑜 + 𝛿𝑥𝑝 𝛿𝜔 𝛿𝜔 + 𝛿𝑥𝑝 𝛿𝜑𝛿𝜑 + 𝛿𝑥𝑝 𝛿𝜅 𝛿𝜅 ………..……….………... (I.24) 𝑦𝑝 = (𝑦𝑝)𝑜 + 𝛿𝑦𝑝 𝛿𝑥𝑜𝛿𝑥𝑜 + 𝛿𝑦𝑝 𝛿𝑦𝑜𝛿𝑥𝑜 + 𝛿𝑦𝑝 𝛿𝑧𝑜𝛿𝑥𝑜 + 𝛿𝑦𝑝 𝛿𝜔 𝛿𝜔 + 𝛿𝑦𝑝 𝛿𝜑 𝛿𝜑 + 𝛿𝑦𝑝 𝛿𝜅 𝛿𝜅 ……….. (I.25)
Proses pembentukan persamaan normal untuk menyelesaikan persamaan (I.24) dan (I.25) dapat dilihat lebih lanjut pada Kraus (1994), Morgan (2004) dan Wolf (1983). Dalam proyek pemetaan udara, untuk keperluan efisiensi biaya dan mempercepat proses, dipergunakan titik kontrol tanah/GCP seminimum mungkin. Umumnya GCP ditempatkan pada setiap interval 4 s.d. 6 basis foto (Koneckny, 2003 dalam Harintaka, 2008). Untuk perapatan GCP tersebut dipergunakan triangulasi udara, dimana secara matematis menggunakan teknik hitungan Bundle Block Adjustment (BBA). Perapatan GCP ini menggunakan titik sekutu (umumnya berjumlah 6 buah) antar foto yang bertampalan, yang disebut sebagai tie point atau titik von Gruber. Keseluruhan GCP atau tie point tersebut dilakukan perataan (adjusment) secara serempak dengan menggunakan persamaan (I.24) dan (I.25) dengan ditambah koordinat titik (P) sehingga persamaan (I.24) dan (I.25) dapat diperluas menjadi persamaan (I.26) dan (I.27) berikut.
𝑥𝑝 = (𝑥𝑝)𝑜 + 𝛿𝑥𝑝 𝛿𝑥𝑜𝛿𝑥𝑜 + 𝛿𝑥𝑝 𝛿𝑦𝑜𝛿𝑦𝑜 + 𝛿𝑥𝑝 𝛿𝑧𝑜𝛿𝑧𝑜 + 𝛿𝑥𝑝 𝛿𝜔𝛿𝜔 + 𝛿𝑥𝑝 𝛿𝜑 𝛿𝜑 + 𝛿𝑥𝑝 𝛿𝜅 𝛿𝜅 + 𝛿𝑥𝑝 𝛿𝑥𝑝𝛿𝑥𝑝 + 𝛿𝑥𝑝 𝛿𝑦𝑝𝛿𝑦𝑝 + 𝛿𝑥𝑝 𝛿𝑧𝑝𝛿𝑧𝑝……….……..……… (I.26) 𝑦𝑝 = (𝑦𝑝)𝑜 + 𝛿𝑦𝑝 𝛿𝑥𝑜𝛿𝑥𝑜 + 𝛿𝑦𝑝 𝛿𝑦𝑜𝛿𝑦𝑜 + 𝛿𝑦𝑝 𝛿𝑧𝑜𝛿𝑧𝑜 + 𝛿𝑦𝑝 𝛿𝜔 𝛿𝜔 + 𝛿𝑦𝑝 𝛿𝜑 𝛿𝜑 + 𝛿𝑦𝑝 𝛿𝜅 𝛿𝜅 + 𝛿𝑦𝑝 𝛿𝑥𝑝𝛿𝑥𝑝 + 𝛿𝑦𝑝 𝛿𝑦𝑝𝛿𝑦𝑝 + 𝛿𝑦𝑝 𝛿𝑧𝑝𝛿𝑧𝑝……….………..……… (I.27)
1.5.3. Penentuan Posisi dengan GNSS Metode Real Time Kinematic
Menurut Roberts (2004) mengatakan bahwa GNSS (Global Navigation Satellite System) merupakan suatu sistem navigasi dan penentuan posisi geospasial (bujur, lintang, dan ketinggian) dan waktu dengan cakupan dan referensi global yang
menyediakan informasi posisi dengan ketelitian yang bervariasi, yang diperoleh dari waktu tempuh sinyal radio yang dipancarkan dari satelit ke receiver. Beberapa satelit navigasi yang merupakan bagian dari GNSS dimiliki dan dikelola oleh beberapa negara, seperti GPS (Global Positioning System) milik Amerika, GLONASS milik Rusia, GALILEO milik Uni Eropa, COMPASS milik China, IRNSS (Indian Regional Navigation Satellite System) milik India, dan QZSS (Quasi-Zenith Satellite System) milik Jepang (Rizos, 2000).
GPS (Global Positioning System) adalah sistem navigasi dan penentuan posisi berbasis satelit yang dapat digunakan oleh banyak orang sekaligus dalam segala cuaca. GPS didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti dan juga informasi waktu secara kontinyu di seluruh dunia (Abidin, 2007).
Konsep penentuan posisi dengan GPS adalah space resection (pengikatan ke belakang) dengan jarak, yaitu dengan mengukur jarak ke beberapa satelit GPS yang telah diketahui koordinatnya secara simultan. Penentuan posisi GPS dilakukan dengan metode absolut dan metode relatif.
1. Penentuan posisi GPS dengan metode absolut.
Penentuan posisi metode absolut merupakan metode penentuan posisi GPS yang paling mendasar, disebut juga dengan point positioning. Ketelitian yang dihasilkan dengan metode absolut tidak begitu tinggi, karena pada umumnya metode ini menggunakan data pseudorange, ataupun carrier beat phasecarrier beat phase yang telah diketahui cycle ambiguity nya. 2. Penentuan posisi GPS dengan metode relatif.
Penentuan posisi metode relatif adalah metode penentuan posisi dengan cara menentukan vektor jarak antara dua stasiun pengamat. Vektor jarak ini lebih dikenal dengan jarak basis (baseline). Penentuan posisi dengan metode relatif sering disebut juga dengan penentuan posisi secara diferensial (differential positioning) atau Differential Global Positioning System (DGPS). Pada metode relatif, data ukuran pengamatan dapat berupa data pseudorange maupun carrier beat phase. Pada penentuan posisi teliti cenderung menggunakan data carrier beat phase (Leick, 1995).
Penentuan posisi GPS metode relatif memiliki ketelitian yang relatif tinggi karena data yang digunakan berupa data pseudorange dan/atau data fase
dengan pengurangan data yang diamat oleh dua receiver GPS secara bersamaan. Dengan adanya proses pengurangan data, kesalahan jam receiver dan satelit dapat dihilangkan, serta kesalahan dan bias troposfer, ionosfer, atau ephemeris dapat direduksi.
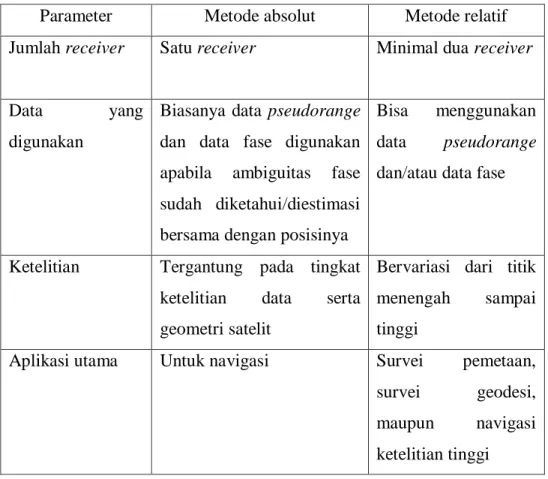
Tabel I. 1. Perbedaan penentuan posisi metode absolut dan metode relatif (Abidin, 2002)
Parameter Metode absolut Metode relatif Jumlah receiver Satu receiver Minimal dua receiver
Data yang
digunakan
Biasanya data pseudorange dan data fase digunakan apabila ambiguitas fase sudah diketahui/diestimasi bersama dengan posisinya
Bisa menggunakan data pseudorange dan/atau data fase
Ketelitian Tergantung pada tingkat ketelitian data serta geometri satelit
Bervariasi dari titik menengah sampai tinggi
Aplikasi utama Untuk navigasi Survei pemetaan, survei geodesi, maupun navigasi ketelitian tinggi
Penentuan posisi dengan metode RTK merupakan penentuan posisi secara diferensial menggunakan data fase. Pada dasarnya, pengamatan dengan metode real time menggunakan satu receiver berada pada stasiun referensi yang koordinatnya telah diketahui. Receiver tersebut mengamati satelit GPS secara terus menerus, yang kemudian dengan menggunakan komunikasi tertentu, data koordinat serta koreksi pseudorange maupun fase dikirim secara kontinyu kepada satu atau lebih receiver rover untuk memperoleh posisi secara real time relatif terhadap stasiun referensi (Abidin, 2000).
Dalam penggunaan sistem RTK mempunyai tiga komponen penting:
a. Stasiun referensi atau base station, terdiri dari receiver dan antenna. Base station berfungsi untuk mengolah data diferensial dan melakukan koreksi carrier phase yang dikirim via radio modem dari base station ke rover. Koreksi yang dihasilkan receiver pada base station masih dalam bentuk digital dan tidak dapat langsung dikirimkan ke stasiun rover, sehingga perlu diubah dalam bentuk gelombang radio.
b. Stasiun rover, berfungsi untuk mengidentifikasi satelit-satelit pada daerah pengukuran dan menerima data diferensial dan koreksi carrier phase dari base station via radio link dengan radio modem. Koreksi carrier phase yang diterima oleh stasiun rover digunakan untuk mendapatkan posisi yang teliti. c. Data link (hubungan data) diferensial, berfungsi untuk mengirimkan data diferensial dan koreksi carrier phase dari base station ke rover melalui radio modem yang memanfaatkan band frekuensi UHF (Ultra High Frequency), VHF (Very High Frequency) ataupun HF (High Frequency) selain itu juga dapat memanfaatkan modem telepon dan GSM.
Ketelitian tipikal posisi yang diberikan oleh sistem RTK adalah sekitar 1 s.d. 5 cm, dengan asumsi ambiguitas fase dapat ditentukan secara benar (Abidin, 2000). Menurut Diggelen (1997), ada tiga jenis solusi pengukuran pada metode RTK, yaitu: a. Fixed. Receiver sudah terhubung dengan base station, memiliki ketelitian posisi 1 sampai dengan 5 cm, ambiguitas fase sudah terkoreksi, jumlah satelit yang ditangkap > 4, dan bias multipath sudah terkoreksi.
b. Float. Receiver sudah terhubung dengan base station, memiliki ketelitian posisi > 5 cm, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap ≤ 4 (too few satellite), bias multipath belum terkoreksi.
c. Standalone. Receiver tidak terhubung dengan base station, memiliki ketelitian posisi > 1 m, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap ≤ 4 (too few satellite), bias multipath belum terkoreksi.
Abidin (2000) menyebutkan bahwa kesalahan GPS dapat dikelompokkan menjadi 5, yaitu:
1. Kesalahan dari satelit, yang terdiri dari:
a. Ketidakpastian ephemeris. Kesalahan yang muncul karena orbit satelit yang disampaikan oleh ephemeris tidak sama dengan orbit satelit yang sebenarnya.
b. Ketidakpastian jam satelit. Ketidakpastian jam satelit dapat menyebabkan kesalahan yang bisa mencapai 300 km.
c. Selective availability. Penerapan kesalahan orbit yang disengaja. 2. Kesalahan dari medium propagasi.
a. Bias troposfer. Ketebalan lapisan troposfer yang berkisar antara 9 s.d 16 km dapat berpengaruh terhadap sinyal GPS yang melewatinya, dimana sinyal GPS mengalami refraksi yang menyebabkan perubahan arah dan kecepatan sinyal GPS.
b. Bias ionosfer. Kandungan elektron pada lapisan ionosfer dapat mempengaruhi propagasi sinyal GPS dalam kaitannya dengan kecepatan, arah, polarisasi, dan kekuatan sinyal GPS yang melaluinya. 3. Kesalahan pada receiver GPS.
a. Ketidakpastian jam receiver. b. Koordinat stasiun GPS.
c. Kesalahan yang terkait dengan antenna. d. Noise.
4. Kesalahan pada data pengamatan.
a. Ambiguitas fase. Jumlah gelombang penuh yang tidak terukur oleh receiver GPS.
b. Cycle slips. Ketidakkontinyuan jumlah gelombang penuh dari fase pembawa gelombang yang diukur karena pengamatan sinyal oleh receiver terputus.
5. Lingkungan sekitar receiver GPS.
a. Multipath. Fenomena sinyal dari satelit GPS menuju receiver melewati dua atau lebih lintasan (path) yang berbeda.
1.5.4. Teknologi UAV (Unmanned Aerial Vehicle) Aibotix
Aibotix merupakan perusahaan produsen/pengembang wahana udara tanpa awak tipe multicopter yang berasal dari Jerman dan tergabung dalam salah satu bagian dari perusahaan Hexagon group. Aibotix adalah robot udara ultra-modern yang mudah untuk terbang dan memiliki tingkat robotika tinggi. Wahana terbang tersebut telah dikembangkan dengan teknologi terbaru multi-rotor, dan mampu membawa berbagai muatan sensor. Aibotix dapat dikendalikan dari jarak jauh, atau dapat diprogram sebelumnya melalui personal computer/laptop. Aibotix memiliki 6 baling-baling (hexacopter) yang terbang mandiri, khusus dirancang untuk menuntut tugas dalam kegiatan survei dan inspeksi industri. Wahana terbang tersebut dapat selalu menargetkan diri dalam semua mobilisasinya dan secara mandiri dapat membuat resolusi tinggi gambar maupun video.
Aibotix mendukung untuk digunakan dalam berbagai tugas yaitu survei seperti di pertambangan, tempat pembuangan sampah, stok batubara, penciptaan gambar topografi, dokumentasi kemajuan konstruksi, survei dalam kota, foto udara, inspeksi saluran listrik overhead dan transmisi menara, pemeriksaan turbin angin, inspeksi jembatan, bendungan, inspeksi pipa minyak dan gas, pemeriksaan rel kereta api, dsb. Dalam satu set Aibotix dilengkapi oleh beberapa komponen yaitu 1 unit wahana pembawa kamera, 1 unit Live Video Package (LVP) untuk display langsung menampilkan video dari wahana tersebut, 1 unit Remote Control yang mampu menampilkan beberapa informasi seperti ketinggian terbang, lama pemotretan/terbang, tekanan udara, temperatur, kecepatan.
Gambar I. 5. Bagian dari Aibotix (sumber: https://www.aibotix.com/en/)
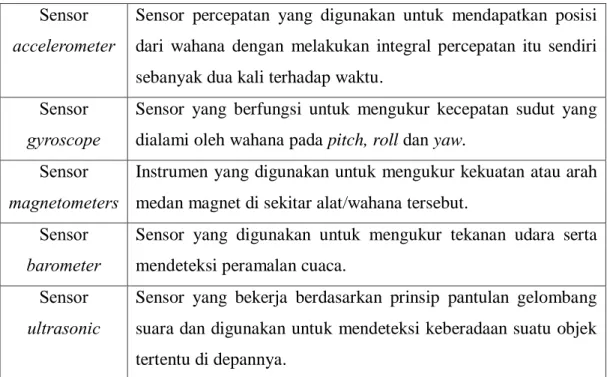
Teknologi Aibotix yaitu dilengkapi beberapa komponen sensor yang terpasang dalam sistem tersebut. Tabel I. 2. Teknologi sensor pada sistem Aibotix.
Sensor accelerometer
Sensor percepatan yang digunakan untuk mendapatkan posisi dari wahana dengan melakukan integral percepatan itu sendiri sebanyak dua kali terhadap waktu.
Sensor gyroscope
Sensor yang berfungsi untuk mengukur kecepatan sudut yang dialami oleh wahana pada pitch, roll dan yaw.
Sensor magnetometers
Instrumen yang digunakan untuk mengukur kekuatan atau arah medan magnet di sekitar alat/wahana tersebut.
Sensor barometer
Sensor yang digunakan untuk mengukur tekanan udara serta mendeteksi peramalan cuaca.
Sensor ultrasonic
Sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya.
1.5.5. Pembentukan dan Visualisasi Model 3D
Model 3D dalam komputer grafis merupakan representasi secara matematis dari objek 3D yang dalam pembuatannya dibantu perangkat lunak khusus pemodelan 3D. Proses menampilkan model 3D sebagai gambar dua dimensi disebut e-3D render atau menggunakan simulasi komputer dalam menampilkan model 10 fisiknya (Yilmaz, 2000).
Beberapa faktor yang mempengaruhi akurasi pembentukan model 3D yaitu (Anonim, 2015):
1. Resolusi foto
Foto dengan resolusi yang tinggi, mampu menghasilkan akurasi yang tinggi karena lokasi objek dapat diketahui secara tepat. Resolusi foto mendefinisikan kemampuan suatu kamera digital atau film scanner. 2. Kalibrasi kamera
Kalibrasi merupakan suatu proses penentuan panjang fokus kamera, principal point, dan distorsi lensa.
3. Sudut antara foto.
Titik dan objek yang sama akan muncul jika pemotretan ditujukan pada objek dengan sudut yang kecil. Misalnya, suatu titik akan muncul jika dua foto dilakukan pemotretan dengan jarak yang dekat.
4. Kualitas orientasi foto
Kualitas orientasi foto merupakan faktor orientasi luar (exterior orientation). Salah satu faktor yang berpengaruh pada akurasi suatu objek adalah posisi setiap kamera yang teliti.
5. Redundansi foto
Sebuah titik atau posisi objek akan lebih teliti jika muncul pada banyaknya foto yang akan dilakukan proses, dibandingkan hanya dengan dua foto. 6. Target
Posisi foto lebih mudah diidentifikasi jika menggunakan target. Ketelitian titik 3D akan tepat jika lokasi pada setiap foto saling terikat
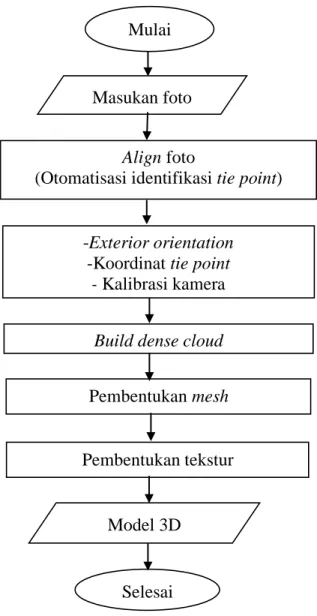
Aristia (2014) menjelaskan bahwa pada umumnya tujuan dari pengolahan foto dalam survei udara dengan wahana udara tanpa awak adalah untuk membangun model 3D bertekstur. Prosedur pengolahan foto dan pembentukan model 3D dengan software Agisoft Photoscan terdiri dari empat tahap utama.
1.5.5.1 Tahap alignment.
Pada tahap ini diawali dengan proses image matching, serta menemukan posisi kamera untuk setiap gambar dan memasukkan parameter kalibrasi kamera untuk menghilangkan efek distorsi pada foto. Sehingga sparse point cloud dan formasi posisi kamera terbentuk. Sparse point cloud merupakan hasil penyelarasan dari beberapa foto dan tidak akan langsung digunakan dalam prosedur pembentukan model 3D. Misalnya, sparse point cloud dapat digunakan sebagai referensi dalam pengeditan model 3D. Sebaliknya, untuk formasi posisi kamera diperlukan untuk proses selanjutnya dalam pembentukan model 3D.
1.5.5.2. Tahap membangun dense point cloud.
Dense point cloud merupakan salah satu metode yang paling sesuai untuk memodelkan obyek yang memiliki tekstur. Metode ini termasuk metode semi-otomatis karena proses pembentukan point cloud dapat dilakukan secara otomatis dengan melakukan sedikit pengaturan setelah semua foto yang diperlukan melalui proses
referencing terlebih dahulu. Dengan kemampuan menghasilkan point cloud yang sangat kecil dan rapat pembentukan model menghasilkan bentuk yang sesuai dengan keadaan yang sebenarnya. Proses pengolahan foto dengan metode ini dilakukan secara stereo matching kualitas point cloud yang dihasilkan sangat bergantung pada proses image matching daerah yang bertampalan pada foto.
1.5.5.3. Tahap membangun mesh.
Prinsip dasar pembentukan mesh adalah melakukan pembentukan poligon di permukaan obyek berdasarkan titik-titik dense point cloud. Poligon-poligon tersebut pada umumnya berbentuk segitiga dan segiempat yang kemudian digabungkan satu sama lain sehingga membentuk suatu permukaan obyek yang solid. Pada perangkat lunak Agisoft PhotoScan poligon yang menyusun permukaan model 3D disebut face/surface sedangkan titik-titik perpotongan antar poligon yang membentuk jaring segitiga disebut vertex.
Gambar I. 6. Face dan vertex penyusun permukaan model 3D
(http://www.euclideanspace.com/threed/solidmodel/boundary/polygonal/index .htm)
1.5.5.4. Tahap pemberian tekstur pada obyek.
Pemberian tekstur ini bisa dilakukan dengan cara memanggil tekstur dari foto aslinya atau memberikan tekstur yang tersedia dalam software pengolahan data.
Gambar I. 7. Diagram alir pengolahan model 3D pada software Agisoft PhotoScan
I.5.6. Pemodelan Digital Elevation Model (DEM)
Pemodelan permukaan merupakan istilah umum yang digunakan untuk menjelaskan suatu proses menyajikan permukaan nyata atau tiruan secara matematis. Pemodelan permukaan bumi merupakan kategori khusus dari pemodelan permukaan yang berkaitan dengan problem khusus untuk menyajikan bentuk permukaan bumi (Djurdjani, 1999).
Masukan foto
Align foto
(Otomatisasi identifikasi tie point) Mulai
-Exterior orientation -Koordinat tie point
- Kalibrasi kamera
Build dense cloud
Pembentukan mesh
Selesai Model 3D
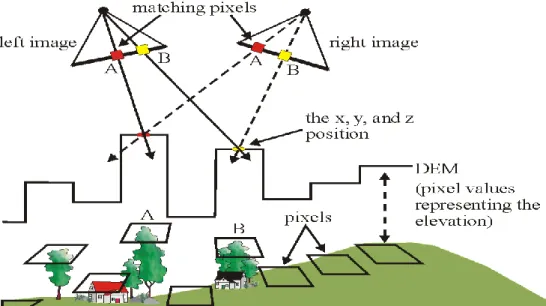
Gambar I. 8. Pembentukan digital elevation model pada kegiatan fotogrametri (Priastina, 2006 dalam Giri, 2012)
Digital elevation model merupakan model permukaan bumi yang terbentuk dari titik –titik yang memiliki nilai koordinat 3 Dimensi (X, Y, Z). Titik-titik tersebut dapat berupa titik sample permukaan bumi atau titik hasil interpolasi atau ekstrapolasi titik-titik sample. Digital elevation model dapat diperoleh dari berbagai macam sumber, seperti pengukuran langsung dilapangan, photogrametric data capture (manual, semi otomatis, dan otomatis), digitasi peta topografi, dan dari sumber lain (RADAR, sonar, laser altimetry).
Digital Elevation Model (DEM) dibedakan menjadi 2 jenis, yaitu Digital Surface Model (DSM) dan Digital Terrain Model (DTM) (intermaps, 2012). Digital surface model adalah model permukaan bumi digital yang memuat elevasi fitur-fitur alami permukaan tanah dan segala obyek yang ada di permukaan tanah, baik obyek alami maupun obyek buatan manusia (Intermap, 2012). Perolehan data digital surface model bisa melalui data dari peta, image matching, maupun pengukuran secara langsung dilapangan. Pada proses pembuatan data digital surface model dengan fotogametri, semua objek yang ada pada permukaan bumi baik objek alami dan objek buatan manusia dianggap sebagai permukaan tanah. Pohon, bangunan dan objek apa saja yang ada pada permukaan bumi pada saat melakukan foto udara akan dimodelkan sebagai data digital surface model. Sedangkan digital terrain model adalah model medan digital yang hanya memuat elevasi fitur-fitur alami permukaan tanah terbuka
tanpa obyek penutup di atasnya baik alami maupun buatan manusia (Intermap, 2012). Digital terrain model adalah sistem informasi yang menyimpan, memanipulasi, dan menampilkan informasi tentang permukaan. Informasi yang ditampilkan adalah permukaan tanahnya saja. Istilah Digital terrain model ini pertama kali diperkenalkan oleh Miller dan La Flame pada tahun 1958. Sejak itu istilah ini banyak digunakan dan dikembangkan dibidang surveying, geologi, geografi, sipil dan perencanaan serta disiplin ilmu kebumian lainnya. Distribusi data Digital Terrain Model (DTM) adalah sebagai berikut:
1. Digital terrain model grid mempunyai titik-titik digital terrain model yang tersebar secara merata pada seluruh permukaan model dan teratur dalam interval tertentu. Titik digital terrain model dapat berupa titik sampel maupun titik hasil interpolasi titik sampel. Permukaan model terbentuk oleh grid yang menghubungkan titik digital terrain model.
2. Digital terrain model TIN menggunakan titik-titik yang tersebar secara tidak teratur pada permukaan model. Permukaan model TIN adalah jaring bidang segitiga yang terbentuk dari triangulasi titik-titik digital terrain model.
3. Digital terrain model kontur menyajikan topografi permukaan bumi dalam bentuk garis-garis kontur yang menghubungkan titik-titik yang memiliki nilai ketinggian yang sama. Digital terrain model kontur didapat dari tracing/plotting model stereo citra dan dari hasil interpolasi digital terrain model Grid atau TIN.
I.5.7. Perhitungan Volume dengan Software 3DReshaper
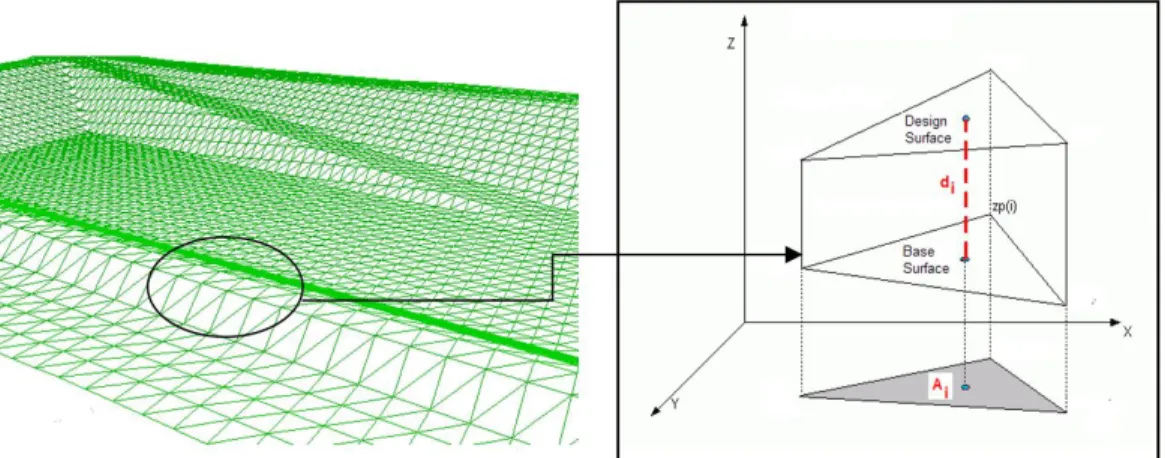
Perhitungan volume air waduk dalam software 3DReshaper dikenal dengan menggunakan overbreak and underbreak atau yang biasa dikenal dengan metode cut and fill. Metode cut and fill yaitu menghitung luasan dua penampang serta jarak antara penampang atas (penampang muka air) dan penampang bawah (model elevasi digital) tersebut. Dengan mengetahui data penampang atas dan penampang bawah, maka dapat dihitung luas masing-masing penampang. Volume dihitung dari DEM yang dibentuk dari jaring-jaring segitiga (TIN). Jaring segitiga inilah yang akan membentuk suatu geometri prisma dari dua surface. Surface dibedakan menjadi dua yaitu design surface
dan base surface. Design surface merupakan surface yang akan dihitung volumenya sedangkan base surface merupakan surface yang dijadikan sebagai alas. Visualisasi penghitungan volume dapat dilihat pada gambar I.10.
Gambar I. 9. Visualisasi penghitungan volume dengan metode cut and fill (Geodis-Ale, 2012)
Gambar I.9 di atas menunjukan bahwa volume total dari suatu area dihitung dari penjumlahan volume semua prisma. Volume prisma dihitung dengan mengalikan permukaan proyeksi (Ai) dengan jarak antara pusat massa dari dua segitiga yaitu desain surface dan base surface (di). Rumus penghitungan volume dengan prism method dapat dilihat pada rumus I.28. (Geodis-Ale, 2012)
Vi = Ai x di ……….……….. (I.28) Keterangan:
Vi : Volume prisma
Ai : Luas bidang permukaan proyeksi
di : Jarak antara pusat massa dua segitiga surface desain dan base desain.
Rumus penentuan volume di atas secara terperinci dapat dijelaskan oleh rumus triangular prism yang dikemukakan oleh Pfilipsen.
Persamaan triangular prism dapat dilihat pada persamaan I.31, I.32, dan I.33 (Pfilipsen, 2006) sebagai berikut.
ℎ𝑚𝑖 = ℎ𝑖1+ℎ𝑖2+ℎ𝑖3
3 ……… (I.31)
Vi = Fi x hmi ……….... (I.32) 𝑉 = ∑𝑛𝑖=0𝑉𝑖 = 𝐹𝑖 𝑥 ℎ𝑚𝑖 ………...……….. (I.33)
Keterangan:
i : segitiga ke-i
n : jumlah seluruh segitiga
hi1, hi2 : tinggi tiap titik pada satu segitiga hmi : tinggi rata-rata dari satu segitiga V : volume objek
Vi : volume dari satu segitiga Fi : area dari satu segitiga