Vol. 8 No. 2 JUNI 2013 ISSN 1907-6169
Majalah Ilmiah Populer
KAJIAN, UJICOBA PELUNCURAN, APLIKASI UAV, DAN
BIMBINGAN TEKNIS KEDIRGANTARAAN
RENCANA PENGEMBANGAN SPACEPORT MOROTAI :
M E D I A
D
IRGANTAR
A
Vol. 8 No. 1 Maret 2013
Majalah Ilmiah Populer
SENSOR KAMERA UNTUK PEMOTRETAN DARI UDARA MENGGUNAKAN UAV Anwar Anas
Peneliti - Pusat Pemanfaatan Penginderaan Jauh e-mail: [email protected]
KOMURINDO 2013 BERTERBANGAN MUATAN DAN ROKET-ROKET BUATAN MAHASISWA Lidia Kristina Panjaitan, Eko Budi Purwanto
Peneliti - Pusat Teknologi Penerbangan e-mail: [email protected]
KEMANDIRIAN TEKNOLOGI ANTARIKSA ISRAEL CERMIN BANGSA YANG KUAT DAN MAJU Zakaria
Pranata Humas - Biro Kerjasama dan Hubungan Masyarakat e-mail: [email protected]
KONSEP OPERASI TELEMETRY TRACKING AND COMMAND (TT&C) PADA PUSAT KENDALI SATELIT LAPAN
Chusnul Tri Judianto
Kepala Bidang Teknologi Ruas Bumi - Pusat Teknologi Satelit e-mail: [email protected]
SIMULATOR HIL UNTUK PERANCANGAN SISTEM KENDALI UAV Prasepvianto Estu Broto; Eko Budi Purwanto
Peneliti - Pusat Teknologi Penerbangan email: [email protected]
REKOR MURI TERBANG TERJAUH PESAWAT TANPA AWAK LSU-02 MODE AUTONOMOUS Yanuar Prabowo
Peneliti - Pusat Teknologi Penerbangan e-mail:[email protected]
LAUNCHING PAD JETTY SEBAGAI SOLUSI ALTERNATIF UNTUK PELUNCURAN ROKET LAPAN DI PAMEUNGPEUK
Moedji Soedjarwo
Kepala Balai Penjejakan dan Kendali Wahana Antariksa Biak - Pusat Teknologi Satelit e-mail:[email protected]
KERJASAMA TEKNIS BIDANG TEKNOLOGI PEROKETAN DENGAN NEGARA UKRAINA Setiadi
Peneliti - Pusat Teknologi Roket email: [email protected]
Pedoman Bagi Penulis Media Dirgantara
Media Dirgantara adalah majalah ilmiah populer yang ditulis dalam bahasa Indonesia untuk memasyarakatkan perkembangan iptek dirgantara secara nasional. Sifat populer berarti istilah teknis dijelaskan secara populer dengan bahasa sederhana, tidak menggunakan rumus-rumus dan tidak perlu daftar rujukan, kecuali menyebutkan sumber yang bersifat umum seperti lazimnya koran/majalah populer. Gambar dan ilustrasi yang lebih menjelaskan isi tulisan sangat diharapkan.
Media Dirgantara mengundang para penulis untuk mengirimkan naskah berupa hasil penelitian, kajian, pengembangan, pemikiran, ulasan atau berita berita kedirgantaraan yang belum dipublikasikan atau dikirim ke media publikasi manapun. Naskah yang dikirim akan dievaluasi Dewan Penyunting dari segi keaslian (orisinalitas), kesahihan (validitas) ilmiah dan kejelasan pemaparan. Naskah yang tidak dimuat akan dikembalikan kepada penulis dengan alasan penolakannya.
Naskah dikirim ke Sekretariat Media Dirgantara, Bagian Hubungan Masyarakat LAPAN, Jl. Pemuda Persil No.1 Rawamangun Jakarta 13220. Naskah diketik dengan MS Word. Penulis yang naskahnya diterima untuk dipublikasikan, diminta menyerahkan file
DA
FT
AR ISI
2
6
12
15
20
26
32
39
SUSUNAN REDAKSI MEDIA DIRGANTARA, Vol. 8 No. 1 Juni 2013 ISSN 1907-6169
Keputusan Kepala LAPAN Nomor: Kep/98/II/2013 Tanggal: 22 April 2013, Penanggung Jawab: Sekretaris Utama LAPAN, Pemimpin Umum: Karo Kerjasama Dan Hubungan Masyarakat, Sekretaris: Kabag Hubungan Masyarakat, KasubBag Publikasi, Penyunting Penyelia: Eko Budi Purwanto, Penyunting Pelaksana: Janu Pringadi, Lely Qodrita Avia, Syamsul Arifin, Anwar Santoso, Moedji Sudjarwo, Fajar Iman Nugroho, Setiadi, Sri Rahayu, Zakaria. Redaktur: KasubBag Publikasi, Murtani November, M Lutfi, Faulina, Sri Rahayu, Irwan. Disain Grafis: Yudho Dewanto.
Alamat Penerbit: BIRO KERJASAMA DAN HUBUNGAN MASYARAKAT LAPAN Jl. Pemuda Persil No. 1 Rawamangun Jakarta Timur 13220
Telepon: (021) 4892802 (Hunting) Fax: (021) 47882726
e-mail: [email protected], [email protected], [email protected] website:http//wwwlapan.go.id
http//jurnal.lapan.go.id Salam Dari Redaksi
Perkembangan teknologi kedirgantaraan dewasa ini cukup pesat termasuk perkembangan pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV). Pesawat tanpa awak ini mempunyai arti yang sangat strategis karena berkemampuan multi fungsi. UAV bisa dimanfaatkan untuk militer, mata-mata, pemotretan dari udara, mitigasi bencana. Sedangkan dari sisi penelitian, UAV sarat muatan karena melibatkan berbagai disiplin ilmu pengetahuan.
Pusat Teknologi Penerbangan – Lapan turut berperan dalam penelitian dan pengembangan pesawat tanpa awak dengan dibuatnya LSU-01 hingga LSU-05 pemanfaatan LSU-01 untuk pemotretan dari udara antara lain untuk prediksi lahan panen di Kabupaten Subang, prediksi timbunan material lahar di puncak, turut serta dalam latihan gabungan TNI di Situbondo, pemotretan perkantoran Lapan Rumpin. Prestasi LSU-02 adalah pencatatan rekor MURI dalam kategori “terbang terjauh dan kembali dalam mode autonomous” yaitu dari lapangan terbang Pemeungpeuk-Garut menuju Nusawiru dan kembali ke Pameungpeuk. LSU-02 juga dimanfaatkan untuk pemotretan dari udara, sedangkan LSU-03 hingga LSU-05 masih dalam proses penyempurnaan. Tidak kalah menarik, informasi tentang pembangunan Hardware In the Loop Simulation (HILS), kerjasama Lapan dengan Ukraina peroketan, pembentukan Pusat Kendali Satelit Nasional dan laporan dari ajang kompetisi muatan roket untuk mahasiswa tingkat Nasional (KOMURINDO 2013) juga disajikan untuk para pembaca pada edisi ini.
Pengembangan sensor kamera, pemecahan rekor MURI dan pembangunan simulator HIL dikelompokan dalam kolom Aktualita. Sedangkan informasi kerjasama dengan Ukraina, gagasan launching pad jetty dan kemandirian teknologi bangsa lain dikemas dalam kolom Faktualita. Sementara itu kolom Sosialita diisi dengan informasi hasil Komurindo dan gagasan pembentukan Pusat Kendali Satelit Nasional.
Berbagai informasi tersebut dikemas dalam majalah Media Dirgantara dengan gaya bahasa ilmiah populer. Pembaca bisa mendapatkan subtansi materi yang disampaikan oleh penulis. Walaupun hanya sekelumit informasi-informasi yang disampaikan, namun cukup penting untuk mengintip kemajuan teknologi dibidang kedirgantaraan saat ini. Selamat membaca semoga mendapat pencerahan.
Selamat membaca Redaksi
U
nmanned Aerial Vehicle (UAV) merupakan pesawat terbang tanpa awak yang terbang secara mandiri (autonomous) berdasarkan program yang telah dimasukkan dalam pesawat sebelum melakukan misinya. Pada awalnya UAV ini hanya digunakan untuk kepentingan militer, namun dalam perkembangannya banyak juga digunakan untuk keperluan sipil seperti pemeriksaan jalur evakuasi bencana, pengamatan vegetasi daerah, pemetaan, pengamatan gunung berapi dan lain lain.UAV untuk keperluan pengamatan dan pemotretan udara.
UAV memiliki bentuk, ukuran, konfigurasi serta muatan yang berbeda sesuai dengan misi yang harus diperhatikan adalah kecepatan dan arah angin karena dapat mempengaruhi kestabilan terbang UAV. Sedangkan gangguan terhadap pelaksanaan misi adalah berupa awan yang bisa mengganggu sensor dalam menangkap gambar.
SENSOR KAMERA UNTUK
PEMOTRETAN DARI UDARA
MENGGUNAKAN UAV
Anwar Anas
Peneliti Pusat Pemanfaatan Penginderaan Jauh - Lapan E-mail: [email protected]
UAV Lapan (LSU02) dalam uji coba pemotretan di Lapan Rumpin LSU02 di atas Kapal Perang siap menjalankan misinya Flywing sedang settling parameter dan uji terbang sistem autonomous
UAV biasa digunakan dalam misi pemetaan untuk luas area survei tertentu. Artinya, areal tersebut terlalu kecil untuk pemetaan menggunakan satelit inderaja, tetapi terlalu besar untuk survei lapangan secara langsung. Selain itu, UAV juga digunakan untuk pemetaan suatu areal yang sulit dijangkau dan berbahaya, seperti jurang, pegunungan, daerah bencana.
Skema Umum UAV untuk pemotretan udara (Rokhmana, 2010)
AKTUALITA
Sistem Instrumen Untuk Pemoteretan Udara. UAV memiliki dua sistem instrumen yaitu instrumen yang berada di dalam pesawat dan instrumen pada sistem ground station. Sistem instrumen yang dibawa pesawat berupa perangkat navigasi dan perangkat pemotretan udara. Sedangkan instrumen di ground station berupa komputer dan receiver. Skema umum instrumen UAV untuk pemotretan dari udara ditampilkan pada gambar berikut ini.
Sensor UAV
Misi pengamatan dari udara UAV dilengkapi dengan sensor berupa kamera digital yang bisa diatur (setting) secara manual. Untuk semua penerbangan UAV, setting kamera menggunakan ISO200 pada F2.8 dan focus 6,2 yang agar hasil foto tidak buram karena memiliki kecepatan rana rata-rata 1/800s. Diagram berikut merupakan proses pemetaan menggunakan kamera digital.
Jenis sensor yang digunakan untuk misi pemotretan udara bisa berupa kamera digital kecil yang dimodifikasi untuk foto udara red, green, blue (RGB), green, red, near infra red (GR-NIR) dan red, green, blue, near infra red (RGB-NIR), kamera multispectral (B, G, R dan NIR) enam atau dua belas kanal serta kamera Thermal Infra Red (TIR) untuk pemotretan malam hari.
Kamera digital yang memiliki panjang gelombang (RGB) 8 bit dan 3 kanal Visible Near Infra Red (VIS-NIR) digunakan untuk pemetaan dalam warna dasar (RGB), untuk kamera digital dengan panjang gelombang (GR-NIR) 8 bit dan 3 kanal VIS-NIR digunakan untuk pemetaan dalam Colour Infrared (CIR) dan juga untuk analisa Indeks Vegetasi (NDVI), se-dangkan untuk kamera dengan panjang gelombang
(RGB-NIR) 8 bit dan 4 kanal VIS-NIR untuk pemetaan dalam warna dasar (RGB) serta warna infrared (CIR) klasifikasi citra dapat dilakukan.
Kamera digital untuk foto udara
Kamera multispectral (enam kanal) dengan panjang gelombang 10 bit dan 6 kanal VIS-NIR sudah dapat membedakan antar vegetasi, spesies yang berbeda, dan jenis lain yang ditunjukkan oleh perbedaan reflektansi spectralnya. Sedangkan kamera multispectral (dua belas kanal) dengan panjang gelombang 10 bit dan 12 kanal VIS-NIR memiliki akurasi yang lebih baik dalam membedakan antar vegetasi, spesies yang berbeda, dan jenis lain yang ditunjukkan oleh perbedaan reflektansi spectralnya.
Kamera Thermal Infrared digunakan untuk mengumpulkan, menganalisis dan pemodelan fluks energy dan variasi suhu. Pengolahan (Processing)
Foto atau citra diambil secara otomatis tiap 3 detik. Langkah pertama dalam penerbangan UAV adalah membuat perencanaan terbang dengan menentukan rute terbang dan wilayah yang akan diambil datanya melalui ground control station serta menentukan lokasi yang tepat untuk menerbangkan dan mendaratkan UAV dengan mempertimbangkan durasi atau jarak tempuh serta ketinggian terbang UAV.
Kamera Multispectral
Kamera Thermal IR
Pengolahan data menggunakan perangkat lunak (aerial mapping software). Sebelum mengolah foto-foto ke photoscan kita harus melakukan rekonstruksi model 3D. Dalam beberapa kasus sangat sulit atau bahkan mustahil untuk membangun sebuah model 3D yang benar dari satu set foto/citra.
Berikut ini tahapan memproses foto/citra menggunakan Photoscan
• Loading photo into photoscan.
• Melakukan inspeksi foto/citra yang telah diunggah dan menghapus foto/citra yang tidak digunakan. • Menjajarkan foto.
• Membangun 3D model. • Mengedit 3D model.
• Melakukan eksport hasilnya.
Gambar berikut ini merupakan hasil foto udara menggunakan kamera multispectral (RGB-NIR)
Hasil foto kamera multispectral (RGB)
AKTUALITA
Gambar hasil pengolahan foto udara model 3D
Hasil foto kamera multispectral (NIR)
Hasil foto kamera multispectral (CIR)
K
ompetisi Muatan Roket Indonesia (KOMURINDO) merupakan program kompetisi kemahasiswaan yang diselenggarakan Direktorat Penelitian dan Pengabdian kepada Masyarakat (D2PM), Direktorat Jenderal Pendidikan Tinggi (DIKTI), Kementrian Pendidikan dan Kebudayaan Nasional Republik Indonesia (KemDikBudNas RI) sejak tahun 2009. Sebenarnya KOMURINDO telah dimulai sejak tahun 2008, akan tetapi, pada saat itu namanya Roket Uji Muatan (RUM). Pada KOMURINDO tahun 2013 ini, bertindak sebagai panitia pelaksana adalah Institut Teknologi Telkom (ITT). Sedangkan Lembaga Penerbangan Dan Antariksa Nasional (Lapan) sebagai panitia pelaksana teknis.KOMURINDO diselenggarakan sebagai sarana untuk mengajak, mendidik dan menarik minat mahasiswa dalam rangka menyiapkan bibit unggul peneliti dan ahli peroketan di Indonesia pada masa depan. Selain itu, diharapkan dapat menumbuhkembangkan kemampuan mahasiswa dalam hal rancang bangun teknologi peroketan, baik dari sisi roket maupun muatannya yang dimulai dari tahapan desain, pembuatan, hingga uji terbang. Muatan hasil rancang bangun mahasiswa ini dapat menjadi cikal bakal lahirnya satelit Indonesia. Sedangkan roket peluncurnya, dalam skala besar dan teknologi yang lebih canggih dapat dikembangkan menjadi Roket Peluncur Satelit (RPS).
Lidia Kristina Panjaitan, Eko Budi Purwanto
E-mail: [email protected]
Kategori KOMURINDO 2013
KOMURINDO 2013 dibagi dalam dua kategori de-ngan tema masing-masing antara lain:
1. Kategori Electric Ducted – Fan (EDF)
Roket EDF adalah rancang bangun roket yang dapat dikendalikan dengan menggunakan motor roket tipe electric deucted fan. Roket EDF dirancang dan dima-nufaktur oleh mahasiswa secara mandiri, desain ukuran roket ditentukan dengan batasan dari panitia antara lain sebagai berikut:
• Berat : Maksimum ≥ 1.5 Kg • Panjang Total : Maksimum ≥ 1 m • Diameter : Maksimum ≥ 15 cm Tema: Autonomous Low Speed EDF Rocket
Autonomous Low Speed EDF Rocket adalah roket yang mampu meluncur sesuai dengan lintasan tertentu dan sanggup mempertahankan kedudukan dan sikap roket terhadap lintasan tersebut secara otomatis dengan kecepatan rendah (<300 km/jam).
2. Kategori Muatan Roket
Tema: High Rate Attitude Data Monitoring and Surveillance Payload
SOSIALITA
KOMURINDO 2013
Berterbangan Muatan dan
Roket-Roket Buatan
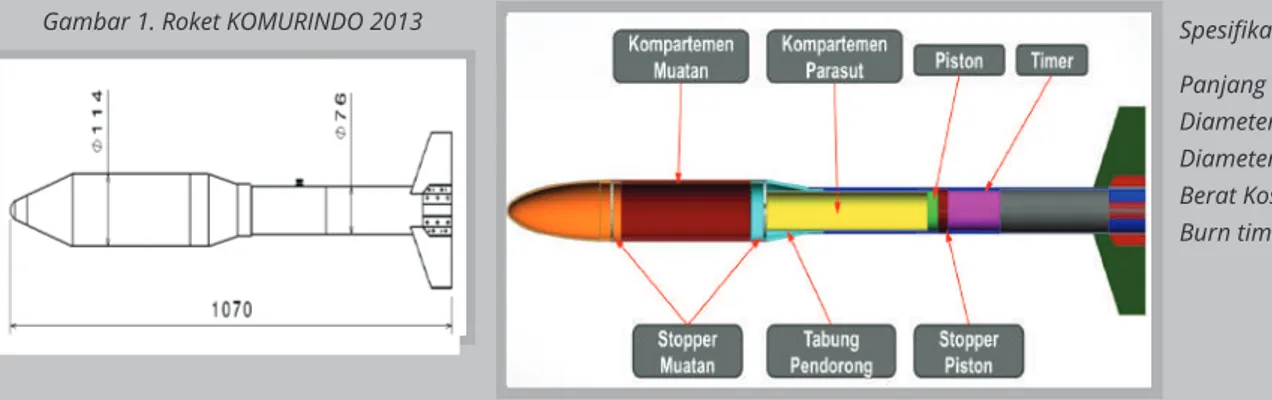
Spesifikasi Roket Komurindo 2013 Panjang roket : 1070 mm Diameter tabung muatan : 114 mm Diameter tabung motor : 76 mm Berat Kosong : 4.5 Kg Burn time : 3 detik
High Rate Attitude Data Monitoring and Surveillance Payload adalah muatan roket yang mampu melakukan penginderaan dinamika roket, pengambilan dan pe-ngiriman data surveillance berupa foto berwarna (RGB) dari udara dengan kecepatan data yang relatif tinggi yaitu 57600 bps.
Daftar Peserta & Evaluasi Keikutsertaan
Untuk mengikuti KOMURINDO setiap peserta harus mengikuti empat tahap evaluasi antara lain:
Dimulai dari tahap I sampai dengan tahap III daftar peserta yang lolos untuk mengikuti tahap IV adalah 30 peserta kategori roket EDF dan 25 peserta kategori muatan roket dari 28 perguruan tinggi. Namun, pada hari uji fungsional untuk tahap IV ada 5 tim peserta kategori roket dan 3 tim peserta muatan roket tidak hadir, sehingga jumlah peserta masing-masing kategori yang berlomba adalah 25 tim Peserta roket EDF dan 22 tim peserta muatan roket.
Uji Fungsional & Uji Statik
Pembukaan KOMURINDO 2013 dihadiri oleh Camat Cikelet, Pameungpeuk, Garut; wakil rektor 1 IT Telkom, Dr. Heroe Wijanto dan Ketua Dewan Juri Dr. Ir. Endra Pitowarno, M.Eng. Pada acara pembukaan ini juga dilaksanakan malam keakraban.
Kopartemen Roket KOMURINDO 2013
Gambar 1. Roket KOMURINDO 2013
SOSIALITA
Foto suasana acara pembukaan KOMURINDO 2013
Sambutan oleh Camat Cikelet Sambutan oleh Wakil Rektor 1 IT Telkom
Spanduk Komurindo 2013
UJI PELUNCURAN
Uji peluncuran dilaksanakan di lapangan Santolo Cilauteureun, Pameungpeuk. Didahului acara ser-emonial, empat roket demo diluncurkan terdiri dari satu roket spanduk KOMURINDO 2013 dan tiga buah roket demo parasut. Penekanan tombol firing dilakukan oleh para pejabat yang menjadi tamu kehormatan KOMURINDO 2013, antara lain: Wakil Rektor 1 IT Telkom Dr. Heroe Wijanto, Direktur Direktorat Penelitian dan Pengabdian Masyarakat Prof Agus Subekti, Deputi Teknologi Dirgantara LAPAN Prof. Dr. Soewarto, Sekretaris Daerah Garut Ir. Edi Muharom, MSi
SOSIALITA
Jumat 01/06/2013 merupakan acara uji dimensi dan fungsional muatan roket serta uji statik roket EDF yang dilaksanakan di Balai Produksi dan Pengujian Roket LAPAN Pameungpeuk, Garut. Uji fungsional yang dilakukan antara lain uji G-force, G-shock, vibrasi dan uji capturing. Pada uji fungsional cukup banyak peserta yang harus retry, dan setelah diberikan kesempatan retry, hanya 13 tim yang lolos ke tahap peluncuran. Setelah 13 tim kategori muatan lolos, maka muatan tersebut mendapat ijin untuk diintegrasikan pada roket dengan membawa surat ijin dari Dewan Juri.
Ruang Uji Statik Suasana di ruang Uji Statik Uji Dimensi
Uji Capturing
Bebrapa Payload yang lolos uji statik
Uji Cp-Cg Uji Fungsionalitas
SOSIALITA
Posisi Dewan Juri
Posisi ground segment Peserta menuju lapangan uji peluncur Peluncuran roket demo oleh para pejabat Roket uji muatan Firing control Launcher pad
SOSIALITA
Beberapa uji peluncuran roket EDF
Pengukuran posisi kamera pengukur Alat uji tekanan roket EDF Launcher roket EDF peserta
KOMURINDO ditutup dengan demo eksibisi peluncuran muatan balon yang direncanakan akan menjadi salah satu kategori yang akan diperlombakan untuk Lomba Muatan Balon 2014 tahun mendatang. Bersamaan dengan pelaksanaan demo, dilaksanakan juga even sejarah yang sangat luar biasa untuk LAPAN yaitu pencatatan MURI untuk LAPAN Surveillance UAV-02 (LSU-02) untuk kategori jarak terjauh (long distance) yang harus dicapai 200 km mulai dari Cikelet-Nusawiru-Cikelet. Sangat patut disyukuri LSU-02 terbang autonomous selama lebih dari 2 jam kembali dengan selamat di Cikelet Pameungpeuk.
Pada puncak acara penutupan KOMURINDO 2013, diumumkan pemenang KOMURINDO 2013 untuk masing-masing kategori. Pengumuman disampaikan langsung oleh Ketua Dewan Juri KOMURINDO 2013 Dr. Ir. Endra Pitowarno, M.Eng. Berdasarkan keputusan Dewan Juri Kompetisi Muatan dan Roket Indonesia Nomor 001/SK-PT/ Komurindo/ITT/2013 tanggal 2 Juni 2013 pemenang KOMURINDO 2013 adalah sebagai berikut :
Juara I Kategori Muatan Roket
Kategorti Muatan Roket :
Juara I: Graksa Ganesha (Institut Teknologi Ban-dung), Juara II: Gathot Kaca (Universitas Gadjah Mada Yogyakarta), Juara III: MDP Blue (STMIK Global Informatika MDP Palembang), Juara Harapan: Pasupati (Universitas Negeri Yogyakarta), Juara Ide Terbaik: StarPENSky (Politeknik Elektronika Negeri Surabaya), Juara Desain Terbaik: Eagle Three (Politeknik Negeri Bandung), Special Award Bupati Garut: Krakataua Next 6 (STMIK Teknokrat Lampung).
Kategori Roket EDF :
Juara I: EEPISky G-04 (Politeknik Elektronika Negeri Surabaya), Juara II: Tim Roket EDF R-DB25 (Politeknik Negeri Jember), Juara III: Krakataua Next 8 (STMIK Teknokrat Lampung), Juara Harapan: Bullet Force 13 (Universitas Komputer Indonesia), Juara Ide Terbaik: Garuda Ganesha (Institut Teknologi Ban-dung), Juara Desain Terbaik: Tim Roket EDF R-DB25 (Politeknik Negeri Jember),Special Award Bupati Garut: Falcon APTRG ( Institut Teknologi Telkom).
Juara I Kategori Roket EDF
Demo eksibisi peluncuran muatan balon
Keberhasilan pencatatan Rekor Muri LSU-02
M
elalui visi yang dibangun oleh Israel SpaceAgency (ISA), terus berupaya meningkatkan
dan memperluas keunggulan komperatif di bidang teknologi antariksa agar dapat memposisikan Israel sejajar dengan negara-negara maju di bidang penelitian dan eksplorasi antariksa dunia.
Indonesia sebagai negara yang merdeka dan berdaulat, memiliki wilayah yang sangat luas di bandingkan dengan Israel, tetapi kemajuan teknologi antariksa Indonesia jauh di bawah Israel. Untuk itu kita perlu mencermati dan mempelajari kemajuan teknologi dirgantara Israel untuk kepentingan kemajuan kedirgantaraan nasional. Lembaga Antariksa Israel, berada di bawah Kementerian Ilmu Pengetahuan dan Teknologi.
Secara kelembagaan ISA dibentuk secara resmi oleh pemerintah Israel tahun 1983, meskipun kegiatan kedirgantaraan Israel secara amatir telah berlangsung sejak tahun 1970. Perdana Menteri Benjamin Netanyahu bertekad menjadikan Israel sebagai superpower di bidang antariksa. Komitmen pemerintahh Israel tersebut bukan sebatas retorika yang biasa didengar di Indonesia. Guna mendukung rencana tersebut, pemerintah Israel terus meningkatkan anggaran penelitian dan pengembangan di bidang antariksa yang menelan biaya miliaran shekel.
Israel memiliki berbagai jenis satelit yang masih beredar di orbit maupun yang akan diluncurkan. Satelit yang masih beredar di orbit seperti, satelit Ofek, satelit Amos, satelit TecSAR, satelit
Eros. Sedangkan satelit Vegetation and Environment monitoring on a New Micro-Satellite (Venus) akan
diluncurkan tahun 2014. Israel juga memiliki wahana peluncur satelit yaitu “Shavit”.
Usaha membangun kemandirian di bidang teknologi antariksa, membuat Israel terus bergerak maju sejak peluncuran satelit Ofek, yang artinya Horizontal. Satelit Ofek adalah, jaringan satelit mata-mata yang pertama kali diluncurkan pada tahun 1988. Suksesnya peluncuran satelit Ofek membuat Israel menjadi negara ke delapan yang mampu meluncurkan satelit ke orbit.
Konsep kemandirian yang dikembangkan Israel di bidang keantariksaan menurut pengamat strategi militer sebagai upaya mengurangi ketergantungannya pada Amerika Serikat dalam hal intelijen. Satelit Ofek saat ini sudah memasuki generasi yang ke 9, sukses diluncurkan pada Juni 2010. Menteri Pertahanan Israel Ehud Barak mengatakan, kesuksesan ini merupakan simbol kemajuan dan sekaligus
kegagahan Israel di bidang antariksa, “The success of
the launch is a symbol of the prowess”.
Di samping satelit Ofek, Israel juga memiliki
satelit mata-mata seperti Tecsar. Satelit-satelit
Earth Remote Observation Satellite-B (EROS-B)
Satelit EROS-B milik Israel
Zakaria Pranata Humas E-mail: zakaria_lapan@yahoo. com
Kemandirian
teknologi
antariksa Israel
cermin bangsa
yang kuat dan
maju
Satelit TECSAR 1
tersebut merupakan satelit resolusi tinggi dengan cakupan luas, menggunakan Electronic Been
Steering
and X-band Radar System yang
dibuat Israel Aerospace Industri, sebuah BUMN di bawah Departemen
Pertahanan. Peluncuran Tecsar membuat Iran sangat marah, karena ia memang diniatkan untuk memata-matai Iran dan negara lain yang dianggap musuh, seperti Suriah dan Palestina. Untuk menjalankan misinya, Tecsar dilengkapi kamera super canggih, yang diklaim sebagai paling maju. Meski lintasan orbitnya di ketinggian 450-800 kilometer, satelit ini bisa menghasilkan resolusi sampai 10 sentimeter, melalui sistem radar gelombang X. Dengan kemampuan sebesar ini, buku yang tengah dibaca Presiden Palestina Mahmood Abbas pun bisa dibaca judulnya. Selain itu, berbeda dengan satelit di masa
lalu, pemotretan oleh Tecsar tidak terpengaruh cuaca. Siang, malam, berawan, atau badai sekalipun, “matanya” bisa tajam menyorot bumi. Tidak mengherankan bila bangunan-bangunan penting milik Hamas di jalur Gaza dengan gampang diluluhlantakkan Israel.
Dengan kecanggihan teknologi yang dimiliki, Israel dengan gampang mengawasi pergerakan pasukan negara-negara tetangganya, entah itu di Suriah, Saudi Arabia, Mesir, Iran. Sebagai satelit mata-mata, Ofek ditempatkan di jalur rendah, di kisaran 300 km – 1.000 km di atas bumi. Dengan orbit yang rendah, ada dua manfaat yang diperoleh. Untuk satu kali orbit mengelilingi bumi, satelit hanya butuh waktu 1,5 jam. Sehingga, kawasan negara tetangga seperti Iran, Palestina, Suriah, Lebanon, dan negara-negara Arab lainnya, bisa dipantau minimal enam kali dalam sehari. Untuk pengintaian sebuah lokasi yang dianggap penting dapat lebih sering dilakukan. Manfaat lain adalah kameranya bisa merekam pergerakan di bumi lebih akurat.
Negara-negara tetangga atau negara yang dianggap musuh ibarat sosok telanjang bagi tentara Israel.
Disamping memiliki satelit mata-mata, Israel juga memiliki satelit komunikasi
Amos, yang diluncurkan pertama
kali tahun 1996, satelit Amos 2 tahun 2003, Amos 3 tahun 2008,
Amos 4 tahun 2013 Amos 5 tahun
2011 dan Amos 6 peluncurannya direncanakan tahun 2016. Satelit ini dibuat oleh Israel Aerospace
Industries. Armada satelit Amos
akan memberikan cakupan lebih banyak dari dunia yang paling cepat perkembangannya dan paling tinggi permintaan pasarnya, termasuk dari negara-negara Timur Tengah,
Eropa Tengah dan Eropa Timur (ETT), Asia dan Afrika. Posisi
Spacecom sebagai operator satelit
multi-regional mencapai lebih dari 80 persen populasi dunia. Satelit ini akan menyediakan layanan komunikasi cepat untuk perusahaan dengan jangkauan geografis yang luas di Afrika dan
Asia, seperti untuk telekomunikasi, operator selular, bank, rumah sakit dan lembaga pemerintah.
Amos-4 adalah salah
satu satelit yang paling canggih dari jenisnya di dunia. Ini memiliki 10 antena, yang belum pernah terjadi sebelumnya untuk satelit komersial. Sistem alokasi sumber daya, uniknya, akan memungkinkan pelanggan untuk menyewakan kapasitas satelit dan mengoperasikan serta mengelolanya sendiri.
AMOS-5 akan menghubungkan
Afrika dengan Eropa dan Timur Tengah. Fixed pan-Afrika C- band
beam tahan terhadap kondisi
cuaca ekstrem, dan memiliki tiga steerable Ku-band beams yang memungkinkan Spacecom untuk mengalihkan mereka ke permintaan yang sesuai. Menurut
Spacecom, salah satu pasar yang
paling laris adalah Asia, untuk layanan video. Selain itu, ada permintaan kuat untuk data dan layanan broadband. AMOS-4 akan menyediakan layanan di seluruh
Roket Shavit
Asia, seluruh Timur Tengah (dari Israel di sebelah barat ke Afghanistan dan Pakistan di sebelah timur) serta Afrika tengah, timur dan selatan.
Jasa pelayanan satelit AMOS di samping untuk lembaga sipil dan pemerintah dan juga dimanfaatkan tentara AS, yang saat ini merupakan pengguna utama dari rentang frekuensi Ka-band, berkat cakupan dari seluruh Timur Tengah ditambah dengan cakupan di Eropa tengah. AMOS-4 akan memungkinkan Pentagon untuk berkomunikasi secara langsung dengan unit-unit militer di Timur Tengah, dan untuk melaksanakan berbagai misi berbasis komunikasi. Misalnya, Pentagon akan dapat memerintahkan atau mengendalikan kendaraan dari jarak jauh di Timur Tengah untuk lepas landas dan mengambil film di daerah tertentu, sehingga memungkinkan komandan AS di lapangan untuk mendapatkan klip video secara realtime dan juga akan memungkinkan bisa konferensi video dari jarak jauh antar pemimpin militer dengan tentara yang ada di padang gurun, sebagai tambahan untuk aplikasi
realtime lainnya.
Bukan Israel kalau tidak berfikir strategis untuk menguasai teknologi dirgantara melalui aspek politis, militer maupun bisnis. Ketiga aspek tersebut diramu menjadi kepentingan yang sangat
menguntungkan bagi Israel, antara lain yaitu melalui pemanfaatan kemampuan pengembangan teknologi satelit untuk bisnis berskala internasional. Rencana tersebut dirancang oleh satu tim beranggotakan para ilmuwan dan ekonom, termasuk di antaranya Profesor Haim Eshed, kepala divisi angkasa Kementerian Pertahanan dan direktur jenderal Kementerian Sains dan Teknologi, Mehahem
Greenblum. Keahlian Israel, kata Eshed, terletak pada pembuatan “satelit mini” seperti satelit Ofek 9 yang baru-baru ini diluncurkan. Satelit tersebut beratnya hanya beberapa ratus kilogram, jauh lebih ringan jika dibandingkan dengan satelit raksasa milik AS dan Rusia yang beratnya berton-ton.
Meski memiliki teknologi canggih, pen-jualan perangkat luar angkasa Isarel dalam 20 tahun terakhir jumlahnya kurang dari $2,5 miliar, dan Israel bisa saja mendapatkan setidaknya 5 persen. Israel tengah melakukan pembicaraan dengan sejumlah negara dan perusahaan keamanan mengenai kemungkinan kolaborasi di bidang antariksa. Melihat keunggulan teknologi satelit Israel, NASA, tertarik untuk membeli payload satelit TecSar Israel.
TecStar mampu mengambil foto dengan resolusi tinggi
melalui kamera radar, bukannya melalui kamera elektro optik yang memungkinkan TecStar menembus semua kondisi cuaca, termasuk kabut dan awan.
Israel, terus berupaya meningkatkan kegiatan penelitian dan pengembangan sistem baru pembuat satelit Ofek dan TecStar, dengan cara menjalin kerja sama dengan Northtrop Grumman, perusahaan industri pertahanan ternama AS, dan bersama-sama memproduksi lalu menjual satelit mini. Israel juga mengembangkan satelit nano. Dalam
beberapa bulan ke depan, rezim Zionis tersebut akan meluncurkan “Incline”, satelit nano pertama Israel yang beratnya hanya 12 kilogram. Prototipe ini akan berfungsi sebagai alat relay transfer data, namun bisa juga digunakan untuk membawa kamera kecil di masa mendatang. Tel Aviv University juga sedang melaksanakan penelitian global positioning
system technology (GPST), guna menyempurnakan
kemampuan Israel di bidang teknologi antariksa. Kunci kemajuan antariksa Israel merupakan gabungan dari komunitas industri, akademisi, dan kerjasama internasional untuk melakukan
research, development, construction, launching and operating bersama yang diimplimentasikan dalam
berbagai program. Salah satu program Israel adalah pembuatan roket sebagai wahana peluncur satelit yang dikembangkan oleh Weapon Systems
Development Authority. Perusahaan ini menyediakan
bahan bakar roket, melaksanakan uji coba
peluncuran, dan memproduksi mesin roket canggih
the advanced engine technology yang digunakan
pada roket “Shavit” tiga tingkat. Motor roket yang dimiliki Israel termasuk tercanggih di dunia. Di era kepemimpinan Bill Clinton, Amerika ingin membeli roket Shavit untuk peluncuran satelit militer Amerika, tetapi gagal karena terganjal oleh kebijakan dan peraturan yang ada.
Chusnul Tri Judianto
Peneliti Bidang Satelit Telekomunikasi Pusat Teknologi Satelit – Lapan
E-mail: [email protected]
P
erkembangan teknologi satelit dunia yang sangat cepat memicu LAPAN terus meningkatkan kemampuan dalam membangun wahana antariksa se-perti satelit, roket dan sistem kendalinya secara mandiri. Salah satu caranya adalah melakukan kerjasama dengan negara maju yang sudah menguasai teknologi antariksa. Dengan kerjasama maka akan terjadi percepatan penguasaan teknologi untuk kemajuan negara dan bangsa. Penelitian dan pengembangan satelit telah dimulai sejak tahun 2003, dan tahun 2007 diluncurkan dan dioperasikan satelit LAPAN-TUBSAT. Pengembangan akan terus dilakukan dengan satelit LAPAN-A2 dan LAPAN-A3, LAPAN-A4 dan LAPAN-A5 yang akan di luncurkan beberapa tahun mendatang.Program pengembangan satelit ini mengharuskan LAPAN secara bertahap menyiapkan sistem kendali satelit yang terpusat, agar kendali kegiatan satelit dapat dilakukan dengan standar operasi yang tepat dan terkoordinasi. Lapan Space Operation Center (LSOC) sebagai pusat kendali satelit LAPAN dan jaringan yang melibatkan operator lain yang berada di wilayah Indonesia harus disiapkan. LSOC bisa digunakan sebagai pusat pertukaran data operasi satelit secara internasional. Seiring dengan perkembangan dan penguasaan teknologi antariksa, LSOC juga dapat menjalankan misi kendali wahana antariksa untuk eksplorasi benda antariksa seperti memantau aktivitas bulan, matahari dan cuaca antariksa.
KONSEP OPERASI TELEMETRY
TRACKING AND COMMAND (TT&C)
PADA PUSAT KENDALI SATELIT
LAPAN
Operasi satelit yang terintegrasi ini dibutuhkan karena dalam beberapa tahun mendatang akan ada beberapa satelit yang dioperasikan secara bersamaan dengan karakteristik orbit yang beragam. Satelit LAPAN-A2 akan berada di orbit ekuator sehingga memiliki waktu kontak sebanyak 14 kali per hari. Sedangkan satelit LAPAN-A3, LAPAN-A4 dan LAPAN-A5 berada di orbit Polar dengan waktu kontak dua hingga empat kali per hari. Dengan perkembangan yang demikian, dimungkinkan untuk melakukan operasi satelit yang terkoordinir dan membangun jaringan kerjasama operasi satelit bersama Negara lain.
PUSAT OPERASI ANTARIKSA INTERNASIONAL
Pusat Operasi Antariksa (Space Operation Centre) merupakan pusat operasi seluruh aktivitas pemanfaatan teknologi antariksa. Operasi ini dilakukan secara terpusat karena membutuhkan koordinasi, sinergi dan kerja yang
terpadu sesuai kompleksitas misi satelitnya. Operasi antariksa mencakup kendali satelit, kendali peluncuran roket dan eksplorasi antariksa.
LAPAN sebagai institusi pemerintah yang mempunyai tugas dan fungsi mengawal pelaksanaan pengembangan teknologi antariksa dengan program utama pengembangan teknologi satelit dan roket di Indonesia. Pengembangan satelit mikro pertama adalah LAPAN-TUBSAT untuk misi surveillance dan generasi berikutnya LAPAN-A2 dengan kemampuan surveillance, ship monitoring dan amateur communication untuk mitigasi bencana sudah siap diluncurkan. Satelit LAPAN-A3 memasuki proses Assembly Integration and Test (AIT) untuk mendukung misi remote sensing sebagai satelit imager pertama yang dibuat oleh LAPAN. Tahapan berikutnya adalah pemanfaatan teknologi satelit untuk ilmu pengetahuan dan teknologi SAR yang menjadi misi satelit LAPAN-A4 dan LAPAN-A5.
Berdasarkan rencana ini, maka konsep operasi satelit yang terintegrasi dan terkoordinasi antar stasiun bumi dalam dan luar negeri harus disiapkan. Disisi lain, LAPAN harus siap melakukan pengembangan dan pemanfaatan teknologi antariksa dan membangun kerjasama antar space agency. Kerjasama tersebut bisa berupa pengoperasian satelit, eksplorasi antariksa, space weather, dan lunar mission yang tergabung dalam jaringan internasional. Impian tersebut sangat mungkin karena didukung posisi Indonesia sebagai daerah lintasan satelit orbit polar dan equatorial (8° LS dan 8° LU). Dukungan stasiun bumi satelit pada saat peluncuran dan operasi perawatannya (TT&C Operation) menjadi sangat penting. Dari pemikiran dan kondisi faktual inilah, maka LSOC dirasa penting dan menjadi sentral pengawalan
aktivitas operasi dan kendali wahana antariksa yang terintegrasi. Hampir semua negara yang mengembangkan satelit memiliki pusat operasi antariksa, sehingga seluruh aktivitas antariksanya dapat terkoordinasi dan tepat. Dibawah ini adalah contoh pusat operasi antariksa beberapa space agency yang ada saat ini.
A. Pusat Operasi Antariksa Eropa; ESOC (Europe Space
Operation Centre)
ESOC merupakan pusat operasi seluruh kegiatan antariksa negara-negara Eropa yang bertugas melaksanakan operasi misi satelit Eropa (Europe Space Agency atau ESA ) dan membangun, meng-operasikan serta merawat stasiun bumi pendukung misi satelit ESA. Operasi yang dilakukan meliputi penyiapan misi peluncuran satelit (LEOP, IOT dan Operasi misi), koordinasi dengan jaringan stasiun bumi kendali internasional untuk mendukung operasi satelit milik ESA (20 negara). Pusat kendali misi ada di Jerman tetapi memiliki
beberapa fasilitas pendukung dibeberapa Negara Eropa dan saling terhubung, seperti ESA science missions (ESTEC) di Noordwijk-Belanda, Earth Observation missions (ESRIN) di Frascati-Italia, ESA Mission Control
SOSIALITA
(ESOC) di Darmstadt-Jerman, the European Astronaut Centre (EAC) di Cologne-Jerman, dan the European Space Astronomy Centre di Villanueva de la Cañada, Spanyol.
Pusat Operasi Antariksa ESOC
SOSIALITA
B. Pusat Operasi Antariksa Jerman; GSOC (German Space
Operation Centre)
GSOC menjadi pusat kendali wahana antariksa yang dioperasikan oleh DLR (German Aerospace centre) yang bertanggung jawab terhadap pengoperasian wahana antariksa (satelit) milik Jerman, milik negara-negara Eropa dan satelit internasional lainnya. Tugas dan tanggung jawab GSOC mencakup:
1. Kendali dan monitoring satelit, subsistemnya dan riset antariksa.
2. Membangun komunikasi antara satelit, stasiun bumi dan pusat kendali
3. Tracking dan penghitungan lintasan orbit satelit
4. Perencanaan dan eksekusi manuver satelit, dan orbit
5. Akuisisi, proses, distribusi dan evaluasi data satelit
6. Perencanaan misi satelit (operasi satelit dan stasiun bumi).
PUSAT OPERASI DAN KENDALI SATELIT LAPAN
Sesuai tugas dan fungsinya, Pusat Teknologi Satelit melaksanakan pengembangan dan pengoperasian satelit LAPAN. Seluruh kegiatan operasi satelit LAPAN dilakukan terintegrasi dengan stasiun pendukung di beberapa wilayah Indonesia stasiun bumi di Berlin (Jerman) dan Spitzbergen (Norwegia).
Kegiatan operasi satelit yang dilakukan meliputi:
1. Satellite Mission and Data Analysis
Merupakan kegiatan inti dalam menjaga kondisi kesehatan satelit dan proses maneuver untuk akusisi data satelit. Saat ini seluruh data telemetry secara real time dan kontinyu dikirim dari beberapa stasiun bumi pendukung (Rumpin,
Rancabungur dan Biak) ke pusat analisis tim untuk mengetahui kondisi kesehatan seluruh subsistemnya.
2. Satellite Operation
• Kegiatan yang dilakukan untuk operasi satelit ini adalah:
• Operasi Telemetry Tracking dan Command (TT&C) yang dilakukan setiap hari (daily operation).
• Perawatan seluruh sistem stasiun bumi untuk kendali satelit.
• Operasi penerimaan data misi satelit (data surveillance) dan operasi bersama dengan badan terkait untuk kepentingan riset antariksa. 3. Development Project
Pengembangan teknologi stasiun bumi dengan melakukan penelitian dan perekayasaan perangkat pendukung sistem stasiun bumi, kegiatannya berupa perekayasaan dan penelitian
perangkat lunak dan perangkat keras sistem pendukung stasiun bumi.
4. Data Archiving
Pengumpulan, penyimpanan dan analisis data hasil operasi TT&C dan misi satelit, serta memastikan bahwa sistem satelit bekerja secara normal dan kualitas data diperoleh dengan baik selama operasi.
STASIUN BUMI PENDUKUNG OPERASI SATELIT LAPAN
Selama lebih dari 5 tahun operasi satelit LAPAN, telah dibangun 5 buah stasiun bumi guna mendukung misi operasi satelit LAPAN. Stasiun bumi tersebut dikembangkan secara mandiri untuk akuisisi data telemetry, data muatan misi dan kendali satelit. Satelit LAPAN beroperasi di orbit polar dan dekat ekuator, sehingga perlu stasiun bumi pada jalur lintas orbit tersebut. Beberapa stasiun bumi pendukung misi satelit LAPAN ditampilkan pada tabel berikut ini.
Jaringan Stasiun Bumi Satelit LAPAN
Dilihat dari jaringan stasiun bumi pendukung operasi satelit LAPAN, ada keterlibatan stasiun bumi lokal dan negara lain di Spitzbergen (Norwegia) dan Berlin (Jerman). Secara teknis satelit LAPAN dapat dioperasikan dari stasiun bumi Rancabungur (remote control). Namun kedua stasiun bumi luar
negeri tersebut sangat menguntungkan karena posisinya di dekat kutub sehingga dapat membantu mengakses satelit LAPAN ketika berada dalam daerah cakupannya. Pada posisi tersebut, stasiun bumi di dekat kutub dalam sehari dapat mengakses satelit pada orbit polar sebanyak 8 kali (Berlin) dan 14 kali (Spitzbergen). Keuntungan inilah yang dimanfaatkan dalam kerjasama operasi satelit.
SOSIALITA
Daerah Eropa dan Kutub Utara dengan akses 14
kali (satellite pass/hari)
78
o20’02’’ N - 15
o28’9’’ W
Spitzbergen- Norway
6
Daera Eropa dgn 8 kali akses (satellite pass/hari)
52
o51’42’’ N - 13
o33’26’’ W
Berlin-Jerman
5
Mencakupi wilayah Kalimantan hingga bagian timur
Sumatera (backup)
109
o22’03’’ E - 00
o00’12’’ S
Pontianak
4
Mencakup Seluruh daerah di Papua hingga Maluku
136
o06’07’’ E - 1
o10’41’’ S
Biak
3
Mencakupi seluruh pulau Jawa dan Bali (SCC)
106
o42’04’’ E - 6
o32’09’’ S
Rancabungur
2
Mencakup seluruh pulau Jawa dan Bali
106
o37’52’’ E - 6
o22’16’’ S
Rumpin
1
AREA CAKUPAN
POSISI
STASIUN BUMI
NO
Daerah Eropa dan Kutub Utara dengan akses 14
kali (satellite pass/hari)
78
o20’02’’ N - 15
o28’9’’ W
Spitzbergen- Norway
6
Daera Eropa dgn 8 kali akses (satellite pass/hari)
52
o51’42’’ N - 13
o33’26’’ W
Berlin-Jerman
5
Mencakupi wilayah Kalimantan hingga bagian timur
Sumatera (backup)
109
o22’03’’ E - 00
o00’12’’ S
Pontianak
4
Mencakup Seluruh daerah di Papua hingga Maluku
136
o06’07’’ E - 1
o10’41’’ S
Biak
3
Mencakupi seluruh pulau Jawa dan Bali (SCC)
106
o42’04’’ E - 6
o32’09’’ S
Rancabungur
2
Mencakup seluruh pulau Jawa dan Bali
106
o37’52’’ E - 6
o22’16’’ S
Rumpin
1
AREA CAKUPAN
POSISI
STASIUN BUMI
NO
Interkoneksi kegiatan LAPAN Space Operation Centre (LSOC)
Bagan Struktur Operasi LAPAN Space Operation Centre (LSOC)
SOSIALITA
Konsep Pusat Operasi Antariksa LAPAN
Keberadaan Pusat Operasi Antariksa Lapan (LSOC) menuntut kesiapan sedini mungkin berupa sarana stasiun bumi, SDM dan SOP untuk kerjasama operasi satelit internal dan eksternal. Kerjasama operasi satelit eksternal menjadi kebutuhan dalam perkembangan teknologi satelit dan peluncurannya. Ketersediaan fasilitas pendukung menjadi daya tarik bagi external space agency untuk tujuan komersial atau untuk penelitian.
Beberapa kegiatan yang dapat dilakukan antar badan antariksa dan operator satelit adalah:
1. Saling bertukar data (data sharing) hasil operasi satelit dan data misi.
2. Tergabung dalam jaringan stasiun bumi operasi satelit internasional untuk saling mendukung ke-giatan operasi antariksa masing-masing.
3. Koordinasi dalam kegiatan Launch and Early Orbit Phase (LEOP), In Orbit Test (IOT) dan operasi misi satelit.
4. Mendukung proses
peluncuran roket dan satelit.
Kerjasama saat in mengedepankan fungsi Mission Operation and Health Analysis (MOHA), Spacecraft Control Centre (SCC) dan operasi jaringan stasiun bumi milik LAPAN yang sudah ada. Kebutuhan LSOC dikarenakan peningkatan operasi satelit milik Lapan, diawali dengan LAPAN-TUBSAT yang saat ini ber-operasi di orbit hingga generasi berikutnya LAPAN-A5 yang masih dalam desain. Dibidang lain kerjasama dalam
hal pembuatan satelit, operasi misi satelit SAR, optic, satcom dan navigasi dengan Jepang (JAXA), India (ISRO), China, dan Jerman. Kegiatan operasi satelit untuk penelitian pemanfaatan data satelit bersama Hokkaido dan Chiba University juga membutuhkan koordinator atau LSOC.
Interkoneksi kegiatan dibawah LSOC diperlihatkan pada gambar berikut.
Pembagian kerja dalam konsep LSOC sangat tertata, terkendali dan tidak tumpang tindih, sehingga pekerjaan operasi satelit, maintenance, analisis data satelit dan diseminasi data dapat dilakukan sesuai prosedur. LSOC merupakan wadah untuk mensinergikan seluruh kegiatan operasi satelit. Semoga gagasan ini menjadi pemicu terwujudnya LSOC yang berpayung hukum.
SIMULATOR HIL
UNTUK PERANCANGAN
SISTEM KENDALI UAV
H
ardware In the Loop Simulations (HILS) adalah komputer terpisah yang digunakan untuk melakukan simulasi perilaku wahana (plant) yang didukung oleh beberapa sistem akuisisi data, pembangkit sinyal dan prototipe sistem kendali yang dapat di uji secara waktu nyata (real time) dan dipresentasikan dalam bentuk perangkat keras (hardware). Di dalam membangun HILS diperlukan model matematika dari Unnamed Aerial Vehicle (UAV) yang akan diteliti dan dikembangkan. Dari model matematika, bisa dianalisis karakteristik stabilitas statis dari UAV. Untuk mendapatkan nilai parameter dinamika terbang sebuah UAV digunakan beberapa metode antara lain: (1) Penurunan model matematika menggunakan metode first principle yang diverifikasi menggunakan sistem identification toolbox Matlab; (2) Pengujian UAV di dalam terowongan angin; (3) Uji terbang UAV dengan Standar Operasional Prosedur (SOP) yang benar.AKTUALITA
Prasepvianto Estu Broto; Eko Budi Purwanto
Email : prasepvianto.fisika43@ gmail.com
TAHAPAN MEMBANGUN HILS.
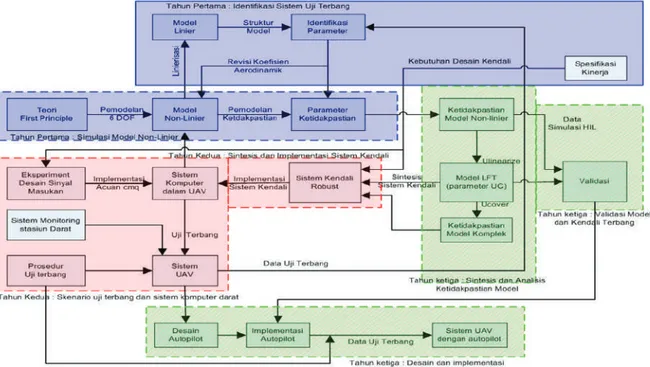
Kegiatan utama dalam penelitian dan pengembangan HILS adalah membangun simulator HILS untuk perancangan sistem kendali UAV menggunakan sistem autopilot. Untuk mewujudkan perangkat keras sistem kendali autonomous untuk UAV diperlukan beberapa tahap penelitian dan pengembangan. Diawali dengan penurunan persamaan keadaan Lapan Survilance UAV-02 (LSU-02)
menggunakan metode first principle dan piranti lunak datcom. Selanjutnya persamaan keadaan divalidasi menggunakan sistem identification toolbox Matlab dan digunakan sebagai model dalam pengembangan sistem kendali hardware secara real time.
MANFAAT HILS.
Simulator HIL dapat digunakan untuk merancang sistem kendali dan mengoreksi model real time yang
AKTUALITA
Tahapan penelitian dan pengembangan HILS.
diturunkan. Secara umum, terdapat perbedaan antara hasil hitungan numerik dengan kenyataan hasil uji terbang atau uji terowongan angin. Untuk memudahkan validasi kedua metode tersebut, maka digunakan HILS dengan dukungan beberapa komputer dan autopilot sebagai sistem kendali. Hasil simulasi menggunakan HILS dapat dipakai sebagai acuan dalam uji terowongan angin atau uji terbang. Simulator HILS sangat cocok untuk penelitian dan pengembangan sebuah sistem dalam kondisi kritis atau beresiko tinggi. Contohnya seperti perancangan sistem kendali un-tuk UAV yang berguna unun-tuk menghindari resiko kerusakan UAV akibat jatuh atau hilang karena diambil alih oleh pihak lain atau tidak terkendali.
STRUKTUR HILS.
Struktur HILS terdiri dari empat komputer. Komputer utama untuk menghitung parameter kontrol. Komputer kedua sebagai pengendali autopilot. Komputer tiga dan empat digunakan untuk tampilan visual menggunakan piranti lunak X-Plane. Piranti lunak X-Plane merupakan perangkat lunak simulator terbang untuk komputer personal (PC) berbasis Linux, Macintosh, dan Windows. Ke empat komputer tersebut terhubung dengan jaringan yang membuatnya dapat saling berkomunikasi.
Parameter-parameter yang mempengaruhi sikap terbang UAV.
Berdasarkan persamaan keadaan yang diperoleh, selanjutnya dirancang sistem kendali Proporsional Integral Derivatif (PID). Untuk memudahkan analisis, persamaan gerak UAV dibedakan atas matra longitudinal dan lateral direksional. Gerak longitudinal dipengaruhi oleh variabel u, w, q dan θ dan ini dibatasi oleh bidang XBZB. Sedangkan gerak lateral direksional dipengaruhi oleh sideslip, rolling dan yawing. Dari persamaan tersebut terlihat bahwa sideslip tidak ter-couple dengan percepatan rolling dan yawing. Padahal dalam kenyataan tidak demikian. Oleh karena itu, dalam hal praktis harus diperhitungkan jumlah coupling yang bisa muncul sebagai resultan gaya aerodinamik yang dibatasi oleh bidang XBZB. Sedangkan gerak lateral direksional dipengaruhi oleh sideslip, rolling dan yawing. Dari persamaan tersebut terlihat bahwa sideslip tidak ter-couple dengan percepatan rolling dan yawing, padahal dalam kenyataan tidak demikian. Oleh karena itu, dalam hal praktis harus diperhitungkan jumlah coupling yang bisa muncul sebagai resultan gaya aerodinamik yang mempengaruhinya. Untuk mempermudah analisis, maka diasumsikan bahwa selama terbang UAV dianggap sebagai benda kaku yang terbang, muatannya berada didalam bodi UAV dan kecepatannya adalah konstan. Parameter-parameter UAV yang diukur diberikan pada gambar berikut.
Dengan menggunakan piranti lunak Matlab, parameter kontrol dibentuk dari persamaan matematika menjadi sinyal Pulse Wave Modulation (PWM) yang dapat terbaca oleh autopilot. Implementasikan HILS menggunakan piranti lunak Matlab dan Simulink ditampilkan pada gambar berikut.
AKTUALITA
Sistem autopilot nantinya digunakan untuk mengontrol UAV agar dapat terbang secara autonomous. Dalam simulator HIL, autopilot diberi masukan berupa parameter UAV yang telah dihitung oleh piranti lunak Matlab. Dari parameter tersebut dapat dianalisis apakah UAV terbang stabil atau tidak. Jika belum stabil, nilai gain
Proporsional Integral dan Derivatif (PID) dari parameter yang sudah dihitung iterasinya dihitung kembali secara real time (di-trim) sampai mendapatkan hasil yang diinginkan.
Parameter kontrol dari Matlab juga dikirimkan ke piranti lunak X-Plane untuk mengetahui visualisasi terbang UAV. Dengan piranti lunak X-Plane, pengguna dapat mengendalikan sebuah wahana terbang layaknya seorang pilot dan dapat merancang serta memodifikasi model geometris wahana terbang sesuai dengan rancangan. Piranti lunak X-Plane menggunakan model matematis berbasis bentuk geometris yang disebut blade-element theory untuk memperkirakan pergerakan dan sikap wahana terbang, sehingga pergerakan dan sikap wahana terbang mendekati kenyataannya. Salah satu kelebihan piranti lunak X-Plane dibanding simulator terbang lain adalah tersedianya fitur layanan pengembangan dengan plugin. Salah satu tampilan dari piranti lunak X-Plane diberikan pada gambar berikut ini. Visualisasi dalam rancangan HILS ini menggunakan piranti lunak X-Plane untuk perancangan plugin sebagai antarmuka
Disain HILS menggunakan Simulink Matlab.
Bentuk fisik sistem autopilot.
AKTUALITA
komunikasi data X-Plane dengan Simulink. Komunikasi data kedua piranti lunak ini menggunakan User Datagram Protocol (UDP). Plugin dirancang menggunakan bahasa pemrograman C++ dengan kompilasi menggunakan Microsoft
Visual studio 2010. Sedangkan fasilitas library digunakan Windows Sockets API (WS2 32) dan X-Plane piranti lunak Development Kit (SDK). Agar piranti lunak X-Plane berfungsi sebagai simulator visual, maka plugin yang dirancang harus
dapat melakukan penonaktifan model geometri pada piranti lunak X-Plane, menerima datagram UDP dari Simulink dan men-set variabel data simulasi pada piranti lunak X-Plane dengan data yang diterima dari Simulink.
Tampilan X-Plane 9 saat dilakukan simulasi HIL
AKTUALITA
Dibangunnya HILS merupakan salah satu cara untuk mengetahui kinerja sistem melalui simulasi. Oleh karena itu, perlu dipahami tiga hal penting yang terkait dengan HILS yaitu (1) keluaran simulasi berupa grafik sinyal waktu pencapaian stabilitas dari sistem, (2) HILS berjalan real time artinya respon yang diberi kan merupakan respon dari perangkat keras dan (3) Embedded piranti lunak HILS pada perangkat keras secara real time sebagai implementasi keadaan sebenarnya.
Keunggulan HILS adalah dapat melakukan simulasi perangkat keras secara real time tanpa resiko kehilangan UAV. Dengan simulator
HILS, maka dapat dilakukan simulasi dan perancangan sistem kendali untuk mendapatkan nilai parameter dinamika terbang sebelum uji terbang UAV sebenarnya.
Keunggulan HILS adalah dapat melakukan simulasi perangkat keras secara real time tanpa resiko kehilangan UAV. Dengan simula-tor HILS, maka dapat dilakukan simulasi dan perancangan sistem kendali untuk mendapatkan nilai parameter dinamika terbang sebe-lum uji terbang UAV sebenarnya.
Plot way point dari Simulink Matlab.
Tampilan flight planner dari APM Planner yang terkoneksi dengan autopilot.
Display UAV pada PC-3 dalam simulasi heksagonal
REKOR MURI TERBANG
TERJAUH PESAWAT
TANPA AWAK LSU-02
MODE AUTONOMOUS
P
erkembangan Unmanned Aerial Vehicle(UAV) saat ini sangat pesat di berbagai negara. Hal ini dikarenakan UAV bisa digunakan untuk berbagai tujuan strategis seperti pemotretan dari udara,
monitoring daerah perbatasan bahkan untuk
keperluan pertahanan suatu negara. Di Indonesia, khususnya melalui Pusat Teknologi Penerbangan LAPAN telah dilakukan penelitian dan pengembangan UAV untuk tujuan
surveillance. Kegiatan tersebut dinamakan LSU
(LAPAN Surveillance UAV) yang telah dimulai pada tahun 2012. LSU-02 (Lapan Surveillance UAV-02) adalah salah satu tipe pesawat UAV
Surveillance yang dimiliki LAPAN hasil kerja tim
Litbang dan manufacturing Pusat Teknologi Penerbangan LAPAN.
Banyak misi yang telah dilakukan oleh LSU-02 salah satunya adalah misi pencatatan rekor MURI untuk terbang terjauh. Sebelum melakukan misi Pencatatan Rekor MURI, LSU-02 ini telah melalui banyak uji terbang diantaranya adalah :
• Uji terbang pertama kali LSU-02 di Nusawiru, pada bulan Maret 2012
• Berbagai uji terbang dan uji sistem avionik di Rumpin, pada bulan April – Oktober 2012
• Uji terbang di Laut Ambalat Sulawesi Utara, pada bulan Oktober 2012
• Uji terbang endurance di Pameungpeuk, pada bulan Februari 2013
• Uji terbang di Situbondo, Jawa Timur, pada bulan Mei 2013
LSU-02 (LAPAN Surveillance UAV – 02)
Spesifikasi LSU-02
LSU-02 (LAPAN Surveilance UAV-02) memiliki spesifikasi sebagai berikut: - Wingspan (Bentang sayap) : 2400 mm
- Fuselage Length (Panjang Pesawat) : 1700 mm - Panjang landasan take off minimum : 20 m - Muatan maksimum : 3 kg - Kecepatan Terbang : 100 km/jam - Kecepatan Maksimum : 150 km/jam - Airspeed Stall : 40 km/jam
- Mesin : 2 Tax 33cc
- Jenis bahan bakar : Pertamax Plus dan Oli Full Sintetic - Kapasitas bahan bakar : 3,5 liter
- Lama terbang maksimum : 4 jam
- Sistem Kontrol : Take Off/Landing dengan Remote Control Terbang jarak jauh secara Autonomous
AKTUALITA
Yanuar Prabowo, ST.
Bidang Teknologi Avionik –
Pusat Teknologi Penerbangan LAPAN [email protected]
Konfigurasi Sistem Kontrol LSU-02 adalah menggunakan sistem autopilot yang dapat dilihat pada gambar berikut
Sistem Autopilot LSU-02 terdiri dari beberapa komponen yaitu:
- RC Transmiter dan Receiver, untuk
take off dan landing LSU-02
- Modul Autopilot, untuk mode terbang dari LSU-02 (Manual,
Autopilot, Stabil)
- Aktuator, untuk penggerak bidang kendali terbang pesawat (elevator, rudder, aileron),
penggerak throttle dan landing
gear depan menggunakan servo
- Sistem Telemetri menggunakan modul radio RF frekuensi 900MHz, antena yagi dan software GCS untuk Ground
Control Stasion
Untuk payload LSU-02 terdiri dari kamera digital dan video recorder sesuai dengan misi yang akan dilakukan. Kapasitas muatan tidak lebih dari 3kg sesuai dengan spesifikasi LSU-02.
Waypoint
Waypoint adalah hal
terpenting dalam penerbangan misi LSU-02, karena dengan
waypoint tersebut pesawat akan
terbang sesuai dengan jalur yang
telah ditentukan sebelumnya.
Waypoint untuk pencatatan rekor
MURI membentang dari Lanud Pameungpeuk Garut sebagai Home base dimana LSU-02 akan Take Off dan Landing sampai titik terjauhnya di Pantai Batu Karas Ciamis.
Jalur terbang yang ditempuh oleh LSU-02 adalah 199.8945 km, yang merupakan perjalanan dari Lanud Pameungpeuk menuju
Diagram blok Sistem Kontrol LSU-02
AKTUALITA
titik terjauh di Pantai Batu Karas Ciamis sekitar 100 km dan kembali ke Lanud Pameungpeuk sebagai
Homenya sekitar 100 km. Sesuai
dengan konsep misi yang telah ditentukan sebelumnya, ketinggian terbang LSU-02 adalah 350 m diatas permukaan laut pada saat berangkat menuju ke pantai Batu Karas Ciamis, sedangkan setelah sampai di titik terjauhnya yaitu di pantai Batu Karas Ciamis, ketinggian terbang LSU-02 turun menjadi 150 m dan saat kembali ke titik Homenya di Lanud Pameungpeuk ketinggian terbang LSU-02 naik lagi menjadi 350 m.
Penurunan ketinggian terbang LSU-02 di titik terjauh yaitu saat di daerah Pantai Batu karas Ciamis dikarenakan untuk mempermudah Tim Pemantau Posisi Terjauh untuk melihat LSU-02 telah sampai pada titik tersebut, sehingga dapat divalidasi dengan kamera GPS yang dibawa oleh Tim Pemantau. Pada gambar waypoint tersebut tampak tanda panah merah yang menunjukkan jalur berangkat LSU-02 ke titik terjauh di Pantai Batu Karas Ciamis dan tanda panah hijau menunjukkan jalur kembali LSU-02 ke Homenya di Lanud Pameungpeuk Garut.
Lanud
Pameungpeuk Garut
Pantai Batu Karas Ciamis
Take offdari Lanud Pameungpeuk
Persiapan take off pesawat oleh tim dimulai pada pukul 05:00 WIB. LSU-02 take off pada pukul 06:30 WIB di Lanud Pameungpeuk. Pada saat take off LSU-02 memiliki spesifikasi misi terbang sebagai berikut:
- Fuel : 3 liter
- Kecepatan angin di landasan : 3m/s
- Kecepatan terbang LSU : 90km/jam
- Payload :
Kamera GPS dan video
recorder
Kamera GPS tersebut berfungsi untuk mengetahui posisi tepat terbang pesawat LSU-02 dan sebagai validasi bahwa LSU-02 telah mencapai posisi yang telah ditentukan. Kamera telah diprogram secara automatis untuk selalu memotret setiap 3 detik.
Monitoring Titik Terbang Terjauh
Monitoring keberadaan LSU-02
pada titik terjauh 100 km dilakukan oleh Tim Pemantau posisi sebanyak
Persiapan dan saat lepas landas (take off) LSU-02
AKTUALITA
4 orang. Posisi titik waypoint tersebut berada pada koordinat latitude: -7.75071001 dan longitude : 108.50269317 (waypoint 16) tepatnya di daerah Pantai Batu Karas Ciamis.
Berdasarkan Waypoint yang telah ditentukan, pada posisi titik terjauh 100 km ini pesawat LSU-02 akan terbang melintasi titik tersebut 4 kali (waypoint titik 16). Hal ini dapat dilihat pada gambar berikut. Tanda panah berwarna merah menunjukkan arah datang pesawat menuju titik pusat waypoint terjauh, sedangkan tanda panah hijau menunjukkan arah pesawat kembali ke Lanud Pameungpeuk Garut. Lintasan terbang di titik terjauh ini dibuat sedemikian
AKTUALITA
rupa seperti bersilang bertujuan untuk mendapatkan data foto dari kamera GPS yang dipasang pada pesawat. Selain itu juga untuk mempermudah validasi posisi oleh Tim Pemantau titik terjauh LAPAN.
LSU-02 mulai terlihat pada pukul 07:34 WIB dan melewati titik waypoint tersebut sebanyak 4 kali sesuai dengan lintasan terbang yang telah dibuat dan langsung kembali ke Pameungpeuk pada pukul 07:37 WIB.
Landing di Pameungpeuk
Pesawat LSU-02 mulai terlihat sekitar pukul 09:00 WIB dan terbang berputar (loiter) diatas Lanud Pameungpeuk beberapa kali sesuai dengan program yang telah dibuat. Setelah menyelesaikan misinya, LSU-02 mendarat dengan baik di Lanud Pameungpeuk Garut pada pukul 09:13 WIB.
Hasil Foto Udara
Foto udara ini diperoleh dari
payload kamera GPS yang terpasang
di badan (fuselage) LSU-02. Pada kamera tersebut dipasang memori sebesar 4 Gb dan diprogram untuk dapat memotret secara otomatis setiap 3 detik. Hasil foto
AKTUALITA
udara dapat dilihat pada gambar di bawah. Setelah take off LSU-02 terbang menuju ke titik terjauh yaitu di daerah Pantai Batu Karas Ciamis dan terbang beberapa kali di pantai tersebut sesuai dengan program misi terbangnya. LSU-02 akan kembali ke home base di Lanud Pameungpeuk Garut setelah
terbang beberapa kali di Pantai Batu Karas Ciamis.
Posisi terakhir kamera memotret adalah pada koordinat latitude : 70 48’ 55.944” dan longitude : 1080 26’ 26.251”. Dari hasil potret ini sudah dapat membuktikan bahwa LSU-02 telah Detik-detik saat LSU-02 mendarat (landing) di Lanud Pameungpeuk
mampu terbang sejauh 100 km dan dapat terbang kembali ke home
base di Lanud Pameungpeuk Garut
dengan total jarak sejauh ± 200 km serta landing dengan mulus.
Penyerahan Piagam MURI
Keberhasilan Tim LSU Pustekbang LAPAN setelah melakukan kegiatan litbang,
manufacturing dan berbagai macam
uji akhirnya terbayar. LAPAN berhasil mencatatkan rekor MURI (Museum Rekor – Dunia Indonesia) atas Pesawat Tanpa Awak (UAV) Terbang Menempuh Jarak Terjauh. Piagam penghargaan di-serahkan oleh Deputy Manager MURI Bapak Damian Awan Rahargo dan diterima langsung oleh Deputi Teknologi Dirgantara Bapak Prof. Dr. Ing. Soewarto Hardienata.
Peristiwa pencatatan rekor ini merupakan momentum peringatan ulang tahun ke-50 bagi LAPAN karena sudah berhasil mencatatkan rekor terbang terjauh untuk kategori pesawat tanpa awak (UAV)
dengan berat total kurang dari 15 kg dan jarak sejauh 200km.
Prestasi ini diharapkan menjadi langkah awal bagi pengembangan pesawat tanpa awak (UAV).
Piagam Penghargaan MURI
Foto udara LSU-02 saat berada di titik terjauh di Pantai Batu Karas Ciamis
Foto udara LSU-02 terakhir yang dapat dilakukan oleh payload kamera
LAUNCHING PAD JETTY
SEBAGAI SOLUSI
ALTERNATIF
UNTUK PELUNCURAN
ROKET LAPAN –
DI PAMEUNGPEUK
Sejarah Landasan Luncur Pameungpeuk
Sejarah peroketan di Indonesia diawali dengan lahirnya Proyek Penelitian dan Pengembangan Roket Ilmiah dan Militer Awal disingkat Proyek “PRIMA” tanggal 22 September 1962 yang merupakan afiliasi AURI dan ITB. Dasar pertimbangan proyek ini adalah untuk membuat wahana dasar yang standar bagi keperluan militer dan sipil dengan biaya rendah yang dibebankan pada anggaran belanja Angkatan Udara (AURI). Dengan dedikasi tinggi dari para peneliti dan tersedianya fasilitas yang dimiliki Perindustrian Angkatan Darat (PINDAD) pada saat itu, maka terwujudlah roket dengan diameter booster 235 mm hasil karya anak bangsa yang diberi nama “KARTIKA-1”. Proyek ini membuktikan adanya kemampuan dalam negeri untuk mengembangkan teknologi peroketan secara mandiri.
Akhirnya roket “KARTIKA-1” diluncurkan secara mulus dari
ROKET KARTIKA-1 ROKET KAPPA-8
FAKTUALITA
Moedji Soedjarwo
e-mail:[email protected]
Stasiun Peluncuran Roket di Pameungpeuk Kabupaten Garut tanggal 14 Agustus 1964, dan Indonesia tercatat menjadi negara kedua di Asia Afrika se-sudah Jepang yang berhasil meluncurkan roket ilmiah buatan dalam negeri.
Selagi kesibukan meliputi pengembangan roket “KARTIKA-1”, upaya mendatangkan teknologi dari luar negeri menjadi semakin nyata berkat terjalinnya hubungan dengan Prof. Dr. Hideo Itokawa, seorang pionir peroketan Jepang. Dari hubungan antar pakar peroketan tersebut, akhirnya diperoleh sistem roket “KAPPA-8” dengan kapasitas angkut muatan 50 Kg ketinggian luncur 200 km sebagai Proyek “S1”. Personil Proyek PRIMA setelah meluncurkan roket “KARTIKA-1” yang ke dua, seluruhnya dialih tugaskan ke Proyek “S1” ditambah sejumlah ilmuan. Dalam waktu kurang dari 7 bulan telah dikirim Tim ke Jepang untuk training peroketan. Indonesia kemudian membangun Stasiun Peluncuran Roket (Staspro) di Pameungpeuk Kabupaten
Garut, termasuk pemasangan dan penyiapan segala fasilitas serta peralatannya. Hasilnya bulan Agustus 1965 meluncurlah roket-roket “KAPPA-8” dengan mulus yang mencapai ketinggian 364 km. Arti penting dari peristiwa ini adalah untuk pertama kali telah diluncurkan roket dari bumi Indonesia memasuki antariksa, yang apogeenya melebihi tinggi orbit para kosmonot dan astronot pada waktu itu. Ketinggian yang dicapai merupakan rekor bagi peluncuran roket dari daerah khatulistiwa. Lokasi Stasiun Peluncuran Roket Sonda yang digambarkan oleh Prof. Dr. Hideo Itokawa diperlihatkan pada gambar dibawah.
Tragedi nasional tahun 1965 yang mengakibatkan surutnya kegiatan peroketan, sehingga fungsi Stasiun Peluncuran Roket terbengkalai. Namun tahun 1972 kegiatan peroketan kembali bangkit dengan adanya penelitian yang dilakukan oleh LAPAN dan TNI AU. Hasilnya, tahun 1973
Peluncuran roket KARTIKA-1 bulan Agustus 1964 dan roket KAPPA-8 bulan Agustus 1965
ROKET KARTIKA-1 ROKET KAPPA-8
FAKTUALITA
penggunaan Staspro kembali semarak untuk peluncuran roket-roket “PRI MA-I” hasil penelitian Dislitbang TNI AU yang menggunakan bahan bakar polibutadiena. Kegiatan peluncuran dilanjutkan tahun 1974 dengan roket “PRIMA-II”, kemudian tahun 1983 Lapan kembali menggunakan fasilitas landasan luncur untuk uji terbang roket eksperimen dengan bahan bakar polisulfida. Setelah itu hampir setiap tahun dilakukan uji terbang roket eksperimen Lapan dengan diameter dan bahan bakar yang berbeda. Perkembangan bahan bakar tahun 1978 hingga 1994 menggunakan poliurethan dan pada tahun 1994 sampai saat ini menggunakan polibutadiena.
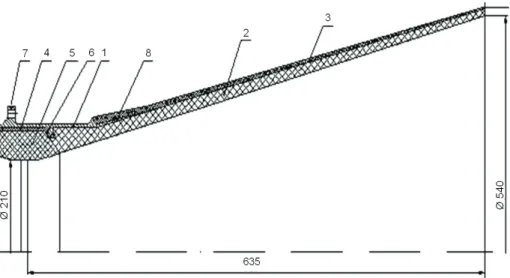
Fasilitas Launching Pad Stasiun Peluncuran Roket Saat Ini
Sejak dibangunnya Staspro hingga saat
ini pengembangan fasilitas terus berlangsung
sejalan dengan kebutuhan litbang peroketan.
Launching pad yang semula hanya satu
bertambah dua unit untuk peluncuran
roket-roket berdiameter kecil jenis RX70, Rhan 122
dan D230 untuk pertahanan, hasil kerjasama
Lapan dengan Dislitbang TNI AU. Fasilitas
launching pad yang ada saat ini diperlihatkan
pada gambar berikut.
Peta lokasi stasiun peluncuran roket sonda di Pameungpeuk – Garut, Jawa Barat
Perubahan yang terjadi di Staspro Lapan Pameungpeuk
Dinamika perkembangan
fasilitas di Staspro Lapan
Pameungpeuk
juga
diikuti
perubahan organisasi sesuai
tuntutan jaman dan menuju arah
lebih baik. Misalnya, nama Stasiun
Peluncuran Roket pada tahun
2001 berubah menjadi Instalasi Uji
Terbang dan di tahun 2011 berubah
lagi menjadi Balai Produksi dan
Pengujian Roket, sampai saat ini.
Perubahan secara fisik juga
dapat dilihat dari tampilan depan
pintu masuk kantor, dimana sejak
tahun 2000 sampai dengan tahun
2012 telah terjadi 4 kali perubahan.
Dari sisi peningkatan kualitas SDM,
maka pada tahun 2011 dibangun
Musholla. Keberadaannya sangat
FAKTUALITA
Kondisi launching pad di Staspro saat ini
bermanfaat bagi karyawan dan
karyawati muslim terlebih pada
saat ada kegiatan peluncuan roket
yang mengundang tamu hingga
400 sampai dengan 600 orang.
Musholla yang diberi nama Sholihus
Salaam merupakan renovasi
gedung Meteorological Sounding
System yang tidak dipergunakan.
Fasilitas lain yang dikembangkan
adalah Testbed untuk uji statik
roket jenis RX550 s/d RX750 serta
pembangunan gedung untuk liner
propelan berdiameter besar.
Arah Perkembangan Peroketan Indonesia
Dalam kegiatan penelitian
dan pengembangan teknologi
peroketan, kegiatan uji terbang
merupakan tahapan kegiatan yang
harus dilalui, setelah kegiatan
uji statik dan laboratorium.
Uji terbang ditujukan untuk
mengetahui perilaku dan kinerja
sistem pada kondisi lingkungan
sesungguhnya. Kinerja roket dan
muatan misi ilmiah yang berupa
hasil penelitian dan perekayasaan
seperti subsistem telemetri dan
perangkat pengindera dinamik
diuji dalam lingkungan sebenarnya.
Mengingat Lapan sebagai lembaga riset dibawah koordinasi Kementerian Riset dan Teknologi yang menangani bidang peroketan, maka tidaklah berlebihan jika dikatakan bahwa arah perkembangan peroketan nasional akan ditentukan juga oleh Lapan dan TNI. Hal ini ditandai dengan Program Roket Pengorbit Satelit
FAKTUALITA
(RPS) dan Roket Pertahanan (Rhan) yang merupakan konsorsium dari beberapa lembaga riset, perguruan tinggi dan Kementerian Pertahanan. Untuk itu peningkatan
Perubahan pintu gerbang Stasiun Peluncuran Roket di Pemeungpeuk
performance roket Lapan sangat diperlukan agar Lapan mempunyai standar roket yang handal untuk jangkauan minimal Low Eart Orbit (LEO) dan untuk pertahanan.
Peluncuran roket RX420 roket terbesar yang pernah diluncurkan di Staspro Pameungpeuk diperlihatkan pada gambar berikut.