III.
PEMODELAN SISTEM PENDULUM TERBALIK
3.1 Sistem Pendulum Terbalik Tunggal
Pada penelitian ini diperhatikan sistem pendulum terbalik tunggal seperti Gambar 4 berikut.
Gambar 4 Sistem Pendulum Terbalik Tunggal.
Pada Gambar 4, pendulum terbalik dimuat dalam motor yang bisa digerakkan. Diasumsikan motor bergerak dalam dua dimensi, yaitu motor bergerak ke arah kanan atau ke kiri, sedangkan pendulum bergerak ke arah kanan atau ke kiri dalam bidang datar. Diasumsikan juga bahwa posisi awal pendulum ada di titik 0 dan pendulum bergerak dari keadaan diam.
Berat massa motor dinotasikan M dan berat massa pendulum dengan m, semuanya dinyatakan dalam kilogram. Posisi motor dinotasikan x dan panjang pendulum dilambangkan dengan 2l, semuanya dinyatakan dalam meter. Pendulum diasumsikan seragam (uniform) sehingga momen inersia diberikan oleh 1 2.
3
J ml Diasumsikan friksi antara pendulum dengan motor sebesar dan friksi antara motor dengan lintasan sebesar . Diasumsikan bahwa sudut yang dibentuk oleh pendulum adalah cukup kecil.
Jika pada motor diberi gaya dorong sebesar u, maka diperoleh berturut-turut total energi kinetik (T), total energi potensial (P) dan total energi kinetik yang diakibatkan friksi (D) antara motor dengan lintasan dan motor dengan pendulum sebagai berikut (lihat Lampiran 4):
1 2 1 2 cos 2 2 2, 2 2 3 T Mx mx mlx ml (3.1) P mglcos , (3.2) M x u mg
13
1 2 1 2,
2 2
D x (3.3) dengan x t , t berturut-turut merupakan kecepatan motor dan kecepatan
angular pendulum pada saat t.
Deskripsi matematika dari karakteristik dinamik suatu sistem disebut model matematika (Ogata 1984). Guna mendapatkan model matematika untuk sistem pendulum terbalik tunggal, maka dapat digunakan persamaan Euler-Lagrange(Thompson 1990).
Bentuk umum fungsi Lagrange dari sistem dinyatakan sebagai berikut T P (3.4) , dengan T adalah total energi kinetik dan P adalah total energi potensial.
Dengan mensubtitusikan persamaan (3.1) dan (3.2) ke persamaan (3.4), maka diperoleh fungsi Lagrange sebagai berikut.
1 2 cos 2 2 2 cos .
2 M m x mlx 3ml mgl (3.5) Untuk menyamaratakan koordinat perlu diperhatikan gerak translasi motor x dan gerak osilasi pendulum , sebagai dua buah keluaran yang selalu
berubah-ubah jika diberikan gaya dorong u.
Misalkan vektor koordinat sistem adalah w (w w1, 2) dengan w1 x dan w2 dan misalkan 1
1 dw w dt dan 2 2 , dw w
dt maka persamaan Euler-Lagrange untuk sistem ini diberikan sebagai berikut:
Untuk gerak translasi motor 1 1 1 . d D u dt w w w (3.6)
Untuk gerak osilasi pendulum
2 2 2
0.
d D
dt w w w (3.7) Selanjutnya persamaan Euler-Lagrange dari persamaan (3.3) dan (3.5) diperoleh sebagai berikut (secara lengkap lihat di Lampiran 4).
14 M m x ml x u, (3.8) 4 2 0, 3 mlx ml mgl (3.9) dengan x t , t merupakan percepatan motor dan percepatan sudut pendulum
pada saat t. Selanjutnya hasil transformasi Laplace dengan syarat awal
0 0, 0 0, 0 0, 0 0
x x dan 0 0 pada persamaan (3.8) dan
(3.9) diperoleh sebagai berikut (lihat Lampiran 5):
M m s X s2 mls2 s sX s U s (3.10) , 2 4 2 2 0. 3 mls X s ml s s mgl s s s (3.11) dengan ( ) , s £ t sX s £ x t( ) ,s s £ ( ) ,t 2 ( ) , s X s £ x t 2 ( ) . s s £ t
Selanjutnya dari persamaan (3.10) dan (3.11) diperoleh setiap fungsi transfer
P s sebagai berikut (lihat Lampiran 6): 2 2 3 2 3 2 1 0 ( ) 4 3 3 ( ) , ( ) ( ) x X s ml s s gml P s U s s a s a s a s a (3.12) 2 3 2 3 2 1 0 ( ) 3 ( ) , ( ) s mls P s U s s a s a s a s a (3.13) dengan 2 3 2 2 1 0 (4 ), 3 ( ) 4 , 3 3 ( ), 3 . a ml M m a M m ml a mgl M m a mgl
Dalam hal ini, P sx( ) menyatakan fungsi transfer yang menghubungkan input kendali u dengan posisi motor x dan P s( ) menyatakan fungsi transfer yang menghubungkan input kendali u dengan sudut pendulum .
Pada penelitian ini yang menjadi pokok perhatian adalah fungsi transfer P sx ,
15
3.2 Sistem Pendulum Terbalik Ganda
Pada penelitian ini diperhatikan sistem pendulum terbalik ganda seperti Gambar 5 berikut.
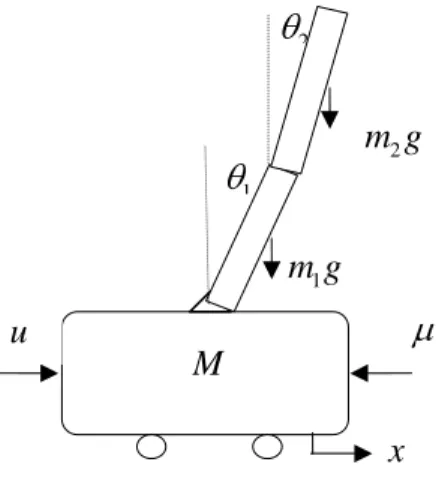
Gambar 5 Sistem Pendulum Terbalik Ganda.
Gambar 5 mengilustrasikan dua buah pendulum terbalik dimuat dalam motor yang bisa digerakkan. Diasumsikan motor bergerak dalam dua dimensi, yaitu motor bergerak ke arah kanan atau ke kiri, sedangkan pendulum pertama atau kedua bergerak ke arah kanan atau kekiri dalam bidang datar. Diasumsikan juga bahwa posisi awal pendulum ada di titik nol dan pendulum bergerak dari keadaan diam.
Berat massa motor dinotasikan M dan berat massa pendulum ke- i denganm , i semuannya dinyatakan dalam kilogram. Posisi motor dinotasikan x dan panjang pendulum ke- i dilambangkan Li 2 ,li semuanya dinyatakan dalam meter. Pendulum diasumsikan seragam (uniform) sehingga momen inersia diberikan oleh
2
1 3
i i i
J m l untuk i 1, 2. Diasumsikan friksi antara pendulum pertama dengan motor sebesar 1 dan friksi antara pendulum pertama dengan pendulum kedua sebesar 2
serta friksi antara motor dengan lintasan sebesar . Diasumsikan bahwa sudut yang dibentuk oleh pendulum i adalah cukup kecil.
Jika pada motor diberi gaya dorong sebesar u, maka diperoleh berturut-turut total energi kinetik (T), total energi potensial (P) dan total energi kinetik yang diakibatkan friksi (D) antara motor dengan lintasan, motor dengan pendulum
1 M x u 1 m g 2 2 m g
16
pertama, dan pendulum pertama dengan pendulum kedua sebagai berikut (lihat Lampiran 8): 2 2 2 2 2 1 1 1 1 1 1 1 1 2 2 1 1 1 2 2 2 2 2 1 1 2 2 2 2 2 2 1 1 2 1 2 2 2 2 1 1 2 1 cos cos 2 2 3 2 1 2 cos cos( ) , 2 3 T Mx m x m l x m l m x m L x m L m l x m l L m l (3.14)
P m gl1 1cos 1 m g L2 1cos 1 l2cos 2 , (3.15) 1 2 1 1 12 1 2 12 22 .
2 2 2
D x (3.16) Untuk menyederhanakan permasalahan tersebut di atas, diasumsikan bahwa pendulum-pendulum memiliki panjang dan massa yang sama, yaitu
1 2 1 2 , . l l l m m m
Persamaan (3.14), (3.15) dan (3.16) menjadi
2 2 2 2 2 1 1 1 1 2 2 2 2 2 1 2 1 2 2 1 2 ( 2 ) 3 cos 2 2 3 2 cos 2 cos( ) , 3 T M m x mlx ml ml mlx ml ml (3.17) P 3mglcos 1 mglcos 2, (3.18) 1 2 1 1 12 1 2 12 22 , 2 2 2 D x (3.19) dengan x t , 1 t dan 2 t berturut-turut merupakan kecepatan motor, kecepatan angular pendulum pertama dan kedua pada saat t.
Pada bagian ini, model matematika untuk sistem pendulum terbalik ganda merupakan perluasan dari model sistem pendulum terbalik tunggal. Oleh karena itu penurunannya pun dapat dilakukan dengan menggunakan persamaan Euler-Lagrange. Selanjutnya perhatikan kembali bentuk umum fungsi Lagrange pada persamaan (3.4) berikut:
T P,
17
Dengan mensubtitusikan persamaan (3.17) dan (3.18) ke persamaan (3.4), maka diperoleh fungsi Lagrange sebagai berikut
2 2 2 2 2 1 1 1 1 2 2 2 2 2 1 2 1 2 2 1 2 1 2 ( 2 ) 3 cos 2 cos 2 3 2
2 cos( ) 3 cos cos .
3
M m x mlx ml ml mlx
ml ml mgl mgl
(3.20)
Untuk menyamaratakan koordinat perlu diperhatikan gerak translasi motor x dan gerak osilasi pendulum 1 dan gerak osilasi pendulum 2, sebagai tiga buah
keluaran yang selalu berubah-ubah jika diberikan gaya dorong u.
Misalkan vektor koordinat sistem adalah w (w w w1, 2, 3) dengan
1 , 2 1
w x w dan w3 2 dan misalkan 1 2 1 , 2 dw dw w w dt dt dan 3 3 , dw w dt maka persamaan Euler-Lagrange untuk sistem ini diberikan sebagai berikut: Untuk gerak translasi motor
1 1 1
d D
u
dt w w w (3.21) Untuk gerak osilasi pendulum pertama
2 2 2
0
d D
dt w w w (3.22)
Untuk gerak osilasi pendulum kedua
3 3 3
0
d D
dt w w w (3.23) Selanjutnya persamaan Euler-Lagrange dari persamaan (3.21), (3.22) dan (3.23) diperoleh berturut-turut sebagai berikut (lihat Lampiran 8):
(M 2 )m x 3ml 1 ml 2 x u, (3.24) 3 16 2 1 2 2 2 3 1 ( 1 2) 1 0, 3 mlx ml ml mgl (3.25) 2 2 1 4 2 2 2 2 2 0, 3 mlx ml ml mgl (3.26) dengan x t , 1 t dan 2 t berturut-turut merupakan percepatan motor dan percepatan sudut pendulum pertama dan kedua pada saat t.
18
Selanjutnya hasil transformasi Laplace dengan syarat awal
1 1 1
0 0, 0 0, 0 0, 0 0, 0 0,
x x dan 1 0 0, 1 0 0, 2 0 0
pada persamaan (3.20), (3.21) dan (3.22) diperoleh berturut-turut sebagai berikut (lihat Lampiran 9): (M 2 )m s X s2 ( ) 3mls2 1( )s mls2 2( )s sX s( ) U s (3.27) ( ), 2 2 2 2 2 1 2 1 1 2 1 16 3 ( ) ( ) 2 3 ( ) ( ) ( ) 0, 3 mls X s ml s s ml s s mgl s s s (3.28) 2 2 2 1 2 2 2 2 2 2 4 ( ) 2 ( ) ( ) ( ) ( ) 0, 3 mls X s ml s s ml s s mgl s s s (3.29) dengan ( ) , sX s £ x t s 1 s £ 1( ) ,t s 2 s £ 2( ) ,t 2 ( ) , s X s £ x t s2 1 s £ 1( ) ,t dan s2 2 s £ 2( ) .t
Selanjutnya berdasarkan persamaan (3.27), (3.28) dan (3.29), maka
diperoleh setiap fungsi transfer P s berturut-turut sebagai berikut (lihat Lampiran 10): 4 2 4 2 2 3 1 2 2 3 2 2 2 2 2 2 1 2 1 2 5 4 3 2 5 4 3 2 1 0 , 28 4 20 9 3 3 28 4 3 3 ( ) ( ), x l m s l m l m s gl m s glm glm s g l m P s s a s a s a s a s a s a (3.30) 1 3 2 4 3 2 2 2 2 5 4 3 2 5 4 3 2 1 0 , 2 3 3 ( ) ( ), l m s lm s gl m s P s s a s a s a s a s a s a (3.31) 2 3 2 4 3 2 2 2 2 1 5 4 3 2 5 4 3 2 1 0 , 2 3 3 ( ) ( ) l m s lm lm s gl m s P s s a s a s a s a s a s a (3.32)
19 dengan 4 2 5 4 2 2 2 2 4 1 2 2 3 2 2 3 1 2 2 1 2 2 2 3 2 2 2 2 1 1 2 2 2 2 1 1 2 2 2 2 0 4 7 2 , 9 28 1 10 4 5 2 , 9 3 3 4 4 5 7 5 2 2 , 3 3 28 4 2 2 , 3 3 2 4 , 3 . a l m M m a l m l m M m l m M m a l m gl m M m M m M m a glm M m glm M m gl m a g l m M m glm a g l m
Dalam hal ini, P sx( ) menyatakan fungsi transfer yang menghubungkan input kendali u dengan posisi motor x dan
1( )
P s menyatakan fungsi transfer yang menghubungkan input kendali u dengan sudut pendulum pertama 1,
2( )
P s menyatakan fungsi transfer yang menghubungkan input kendali u dengan sudut pendulum kedua 2,
Pada penelitian ini yang menjadi pokok perhatian adalah fungsi transfer yang menghubungkan input kendali u dengan posisi motor x, yaitu P sx , yang berarti juga bahwa pengendalian posisi motor merupakan pokok perhatian.