BAB 2 LANDASAN TEORI
2.1 Self Balancing Robot
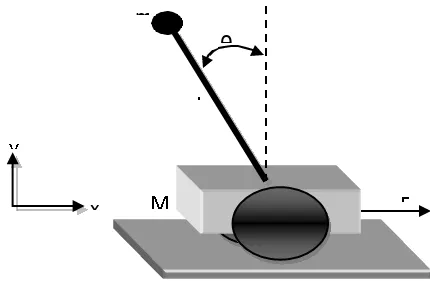
Self balancing robot merupakan pengembangan dari model pendulum
terbalik yang diletakan di atas kereta beroda. Ide dasar untuk membuat robot beroda
dua dapat seimbang adalah dengan cara mengendalikan roda searah dengan arah
jatuhnya bagian atas sebuah robot. Apabila proses tersebut dapat terlaksana maka
robot tersebut dapat seimbang.
Gambar 1 Pendulum terbalik di atas kerata beroda
Saat self balancing robot beroda dua condong ke depan pada gambar 2.2, maka
tindakan yang perlu dilakukan adalah motor akan memutar roda searah jarum jam.
Gaya yang digunakan untuk menyeimbangan dihasilkan dari putaran roda.
Gambar 2 Self balancing robot beroda dua menyeimbangkan diri Ɩ
F M
m
θ
y
2.2. Mikrokontroller
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah
chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM,
memori program, atau keduanya), dan perlengkapan input output. Dengan kata lain,
mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan
keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara
khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data.
Sekedar contoh, bayangkan diri Anda saat mulai belajar membaca dan menulis,
ketika Anda sudah bisa melakukan hal itu Anda bisa membaca tulisan apapun baik
buku, cerpen, artikel dan sebagainya, dan Andapun bisa pula menulis hal-hal
sebaliknya. Begitu pula jika Anda sudah mahir membaca dan menulis data maka
Anda dapat membuat program untuk membuat suatu sistem pengaturan otomatik
menggunakan mikrokontroler sesuai keinginan Anda.
Mikrokontroler merupakan komputer didalam chip yang digunakan untuk
mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya.
Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik
yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC
TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan
oleh mikrokontroler ini.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara
automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan
rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan
konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor
memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat
kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan
mikrokontroler ini maka :
• Sistem elektronik akan menjadi lebih ringkas
• Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi
• Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut
Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset,
walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal,
sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi.
Yang dimaksud dengan sistem minimal adalah sebuah rangkaian
mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi.
Sebuah IC mikrokontroler tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya
sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama.
2.2.1. Fitur AVR ATMega328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai
arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses
eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set
Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
• 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
• 32 x 8-bit register serba guna.
• Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
• 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
• Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent
karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
• Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
• Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
• Master / Slave SPI Serial interface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan
memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan
kerja dan parallelism.
Instruksi – instruksi dalam memori program dieksekusi dalam satu alur
diambil dari memori program. Konsep inilah yang memungkinkan instruksi –
instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba
guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang
dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan
sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk
mengambil data pada ruang memori data.
Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan
R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31
). Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori
program terdiri dari instruksi 16-bit atau 32-bit.
Selain register serba guna di atas, terdapat register lain yang terpetakan dengan
teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk
fungsi khusus antara lain sebagai register control Timer/ Counter, Interupsi, ADC,
USART, SPI, EEPROM, dan fungsi I/O lainnya. Register – register ini menempati
memori pada alamat 0x20h – 0x5Fh.
Gambar 3 Architecture ATmega328
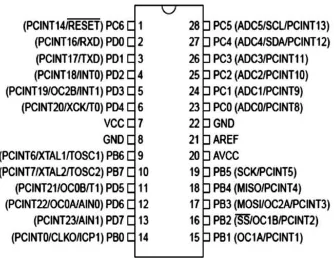
Gambar 4 Konfigurasi pin
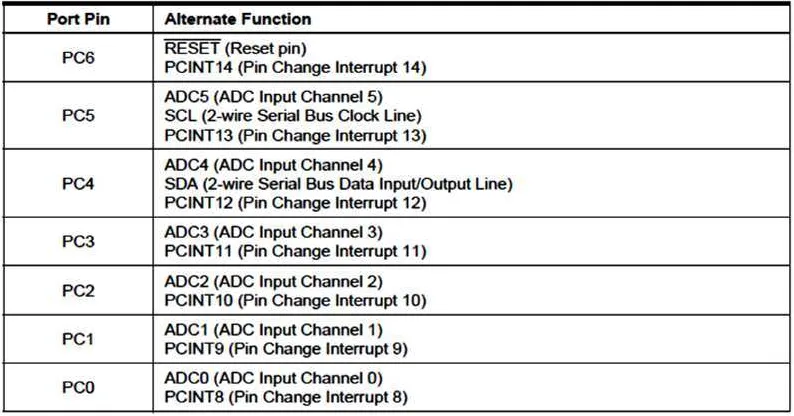
Tabel 2 Konfigurasi PORTC
2.2.2. Memory Mikrokontroller
Mikrokontroller mempunyai beberapa macam memory antara lain :
• Eeprom - Electrically Erasable Programmable Read Only Memory Beberapa mikrokontroler memiliki EEPROM yang terintegrasi pada chipnya.
EEPROM ini dugunakan untuk menyimpan sejumlah kecil parameter yang
dapat berubah dari waktu ke waktu. Jenis memori ini bekerja relatif pelan,
dan kemampuan untuk dihapus/tulis nya juga terbatas.
• FLASH (EPROM) FLASH meberikan pemecahan yang lebih baik dari EEPROM ketika dibutuhkan sejumlah besar memori non-volatile untuk
program. FLASH ini bekerja lebih cepat dan dapat dihapus/tulis lebih sering
dibanding EEPROM.
• Battery Backed-Up Static RAM Memori ini sangat berguna ketika dibutuhkan memori yang besar untuk menyimpan data dan program.
Keunggulan utama dari RAM statis adalah sangat cepat dibanding memori
non-volatile, dan juga tidak terdapat keterbatasan kemampuan hapus/tulis
sehingga sangat cocok untuk aplikasi untuk menyimpan dan manipulasi data
• Field Programming/Reprogramming
Dengan menggunakan memori non-volatile untuk menyimpan program akan
memungkinkan mikrokontroler tersebut untuk diprogram ditempat, tanpa
melepaskan dari sistem yang dikontrolnya. Dengan kata lain mikrokontroler
tersebut dapat diprogram setelah dirakit pada PCB.
• Otp - One Time Programmable
Mikrokontroler OTP adalah mikrokontroler yang hanya dapat diprogram satu
kali saja dan tidak dapat dihapus atau dimodifikasi. Biasanya digunakan
untuk produksi dengan jumlah terbatas. OTP menggunakan EPROM standard
tetapi tidak memiliki jendela untuk menghapus programnya.
• Software Protection
Dengan "encryption" atau proteksi fuse, software yang telah diprogramkan
akan terlindungi dari pembajakan, modifikasi atau rekayasa ulang. Kemampuan ini
hanya dipunyai oleh komponen OTP atau komponen yang dapat diprogram ulang.
Pada komponen jenis Mask ROM tidak diperlukan proteksi, hal ini dikarenakan
untuk membajak isi programnya seseorang harus membacanya (visual) dari chip nya
dengan menggunakan mikroskop elektron.
2.2.3. Input/Output Mikrokontroller
Mikrokontroller mempunyai beberapa Input/Output diantaranya yaitu :
• UART (Universal Asynchronous Receiver Transmitter) adalah adapter serial port adapter untuk komunikasi serial asinkron.
• USART (Universal Synchronous/Asynchronous Receiver Transmitter) merupakan adapter serial port untuk komunikasi serial sinkron dan
asinkron. Komunikasi serial sinkron tidak memerlukan start/stop bit dan
dapat beroperasi pada click yang lebih tinggi dibanding asinkron.
• SPI (serial peripheral interface) merupakan port komunikasi serial sinkron. • SCI (serial communications interface) merupakan enhanced UART
(asynchronous serial port).
banyak digunakan pada consumer elektronik, otomotif dan indistri. I2C bus
ini berfungsi sebagai antarmuka jaringan multi-master, multi-slave dengan
deteksi tabrakan data. Jaringan dapat dipasangkan hingga 128 titik dalam
jarak 10 meter. Setiap titik dalam jaringan dapat mengirim dan menerima
data. Setiap titik dalam jaringan harus memiliki alamat yang unik.
• Analog to Digital Conversion (A/D). Fungsi ADC adalah merubah besaran analog (biasanya tegangan) ke bilangan digital. Mikrokontroler dengan
fasilitas ini dapat digunakan untuk aplikasi-aplikasi yang memerlukan
informasi analog (misalnya voltmeter, pengukur suhu dll). Terdapat
beberapa tipe dari ADC sbb:
o Succesive Approximation A/D converters.
o Single Slope A/D converters.
o Delta-Sigma A/Ds converters.
o Flash A/D.
• D/A (Digital to Analog) Converters. Kebalikan dar ADC seperti diatas. • Comparator. Mikrokontroler tertentu memiliki ssebuah atau lebih
komparator. Komparator ini bekerja seperti IC komparator biasa tetapi
sinyal input/output terpasang pada bus mikrokontroller.
2.2.4. Interupsi
Interupt merupakan metode yang efisien bagi mikrokontroler untuk
memproses periperalnya, mikrokontroler hanya bekerja memproses peripheral tsb
hanya pada saat terdapat data diperiperal tsb. Pada saat terjadi interupt,
mikrokontroler menunda operasi yang sedang dilakukan kemudian mengidentifikasi
interupsi yang datang dan menjalankan rutin pelayanan interupsi. Rata-rata
mikrokontroler memiliki setidak-tidaknya sebuah interupsi eksternal, interupsi yang
dimiliki bisa dipicu oleh "edge" atau "level". Edge triggered interupt bekerja tidak
tergantung pada pada waktu terjadinya interupsi, tetapi interupsi bisa terjadi karena
glitch. Sedangkan Level triggered interupt harus tetap pada logika high atau low
sepanjang waktu tertentu agar dapat terjadi interupsi, interupsi ini tahan terhadap
glitch Interrupts ada 2.
Dengan maskable interupt kita dapat bebas memilih untuk menggunakan
satu atau lebih interupsi. Keuntungan maskable interupt ini adalah kita
dapat mematikan interupsi pada saat mikrokontroler sedang melakukan
proses yang kritis sehingga interupsi yang datang akan diabaikan.
• Vectored Interrupts
Pada saat terjadi interupsi, interupt handler secara otomatis akan
memindahkan program pada alamat tertentu yang telah ditentukan sesuai
dengan jenis interupsi yang terjadi
2.3 Pengendali PID
Sistem Kontrol PID ( Proportional–Integral–Derivative controller) merupakan
kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik
adanya umpan balik pada sistem tesebut (Feed back), mengingat balancing robot
adalah sebuah sistem yang membutuhkan presisi dan menekan noise sekecil mungkin
dari bias pergerkan robot tersebut maka penggunaan kontrol PID sangat dibutuhkan
agar aksi yang dilakukan lebih presisi dan lebih halus sehingga noise dari bias
pergerakan robot dapat diminimalisir dan kecepatan dan arah yang dilakukan sesuai
dengan error sudut robot.
Sistem kontrol PID terdiri dari tiga buah cara pengaturan yaitu kontrol P
(Proportional), D (Derivative) dan I (Integral), dengan masing-masing memiliki
kelebihan dan kekurangan. Dalam implementasinya masing-masing cara dapat
bekerja sendiri maupun gabungan diantaranya. Dalam perancangan sistem kontrol
PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan
sinyal keluaran system terhadap masukan tertentu sebagaimana yang diinginkan
2.3.1 Kontrol Proposional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) x e
maka u = Kp x e dengan Kp adalah Konstanta Proporsional. Kp berlaku
sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja
kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi
dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon
transien khususnya rise time dan settling time.
2.3.2 Kontrol Integral
Jika G(s) adalah kontrol I, maka u dapat dinyatakan sebagai u(t) =
[integarl(t) x dT] Ki dengan Ki adalah konstanta Integral, dan dari persamaan
diatas, G(s) dapat dinyatakan sebagai u = Ki.[deltae / deltat] Jika e(T)
mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga
diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek
kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus
menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat
dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan
ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat
menyebabkan output berosilasi karena menambah orde sistem, sehingga
dalam pembuatan robot ini tidak menggunakan kontrol integeral mengingat
setting kontrol menggunakan metode try and error.
2.3.3 Kontrol Derivatif
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai
G(s) = s x Kd Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini
dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat
digunakan untuk memperbaiki respon transien dengan memprediksi error
yang akan terjadi. Kontrol Derivative hanya berubah saat ada perubahan error
sehingga saat error statis kontrol ini tidak akan bereaksi, hal ini pula yang
menyebabkan kontroler Derivative tidak dapat dipakai sendiri
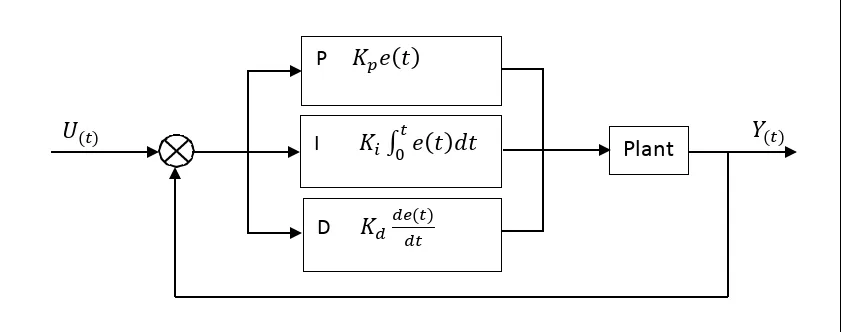
Gambar 5 Block Diagram PID control
Dalam waktu kontinyu, sinyal keluaran PD dapat dirumuskan sebagai berikut:
= + + (1)
Dengan:
u t = Sinyal keluaran pengendali PD K = Konstanta Proporsional
K = Konstanta Integral K = Konstanta Derivatif e t = Error
Pada pembuatan ROBA-G1 penentuan konstanta digunakan metode try and
error, dan hanya menggunakan kontrol PD saja. Untuk mengatur konstanta P dan D
melalui multi turn potensiometer yang akan dibaca ADC yang merupakan fitur dari
mikorkontroller ATMega 16.
Nilai konstanta yang tidak tepat akan membuat pergerakan robot tidak setabil,
maka perlu waktu untuk mengatur konstanta P dan D, tetapi karena input pengaturan
konstanta menggunakan multi turn potensiometer maka dapat dilakukan walaupun
robot sedang bekerja sehingga reaksi dapat terlihat dalam waktu yang sama. Dan itu
dapat mempermudah pekerjaan untuk memilih konstanta P dan D dan dapat
menghemat waktu.
P
I
D
Nilai konstanta yang tepat akan pergerakan robot lebih halus, dan dapat
menghilangkan gerakan yang kasar jika dibandingkan dengan tidak menggunakan
sistem kontrol, jika hal ini terjadi maka tujuan penggunaan sistem kontrol ini untuk
memperhalus gerakan dan menentukan nilai output yang sesuai dengan error
terpenuhi.
2.4 Sensor MPU6050 (Accelerometer dan Gyroscop)
Robot ini menggunakan modul GY-521 yang menggunakan sensor MPU6050,
sensor ini merupakan sensor 3 axis gyroscope dan 3 axis accelerometer dalam satu
chip, pembacaan sensor ini cukup akurat, lebar bit yang digunakan adalah 16 bit
untuk setiap channel. Dan untuk seri 6050 komunikasi hanya menggunakan I2C (
sedangkan untuk seri yang lain dapat juga menggukan komunikasi data SPI.
Spesifikasi:
1. Tegangan kerja 3,3 VDC.
2. Mampu membaca kecepatan sudut pada 6 sumbu.
3. Gyrocope range: ±250/±500/±1000/±2000 dps (degree per second).
4. Accelerometer range: ±2/±4/±8/±16 g.
5. Data output dengan format 16 bit.
6. Dilengkapi dengan sensor temperatur 8 bit.
Gambar 6 MPU6050
Tapi dalam pembuatan Roba_G1 hanya menggunakan 8 bit saja dan hanya
menggunakan 2 (axis), sumbu Y untuk accelerometer dan sumbu Y untuk
Gyroscope. Untuk menentukan sudut kemiringan hanya berdasarkan sumbu Y
terhadap magnet bumi, tapi akan menjadi lebih baik jika sumbu Y berdasarkan
sumbu X, tetapi untuk mengurangi down time pengoperasian program maka hanya
menggunakan sumbu Y saja.
Komunikasi yang digunakan adalah komunikasi I2C, sehingga dapat
menghemat port pada mikrokontroller, dan dapat mempermudah pendataan. Data
yang diterima hanya berbentuk data digital dan tidak dapat langsung digunakan,
perlu dikonversi agar dapat diproses ke Complementary Filter, untuk output
accelerometer dikonversi ke bentuk sudut sedangkan output gyroscope dikonversi ke
bentuk radian.
2.5. Bluetooth
Bluetooth adalah spesifikasi industri untuk jaringan kawasan pribadi (personal
area networks atau PAN) tanpa kabel. Bluetooth menghubungkan dan dapat dipakai
untuk melakukan tukar-menukar informasi di antara peralatan-peralatan. Spesifiksi
dari peralatan Bluetooth ini dikembangkan dan didistribusikan oleh kelompok
Bluetooth Special Interest Group. Bluetooth beroperasi dalam pita frekuensi 2,4 Ghz
dengan menggunakan sebuah frequency hopping traceiver yang mampu
menyediakan layanan komunikasi data dan suara secara real time antara host-host
bluetooth dengan jarak terbatas.Kelemahan teknologi ini adalah jangkauannya yang
pendek dan kemampuan transfer data yang rendah.
Bluetooth adalah teknologi komunikasi wirelees (tanpa kabel) yang beroperasi
pada 2,4 GHz, unlicense ISM (Indrustrial, Scientifik, dan Medical) dengan
menggunakan frequency hopping transleiver yang mampu menyediakan layanan
komunikasi data dan suara secara realtime antara perangkat bluetooth dengan jarak
jangkauan yang terbatas (±10M / 30 kaki), aplikasi-aplikasi yang disediakan layanan
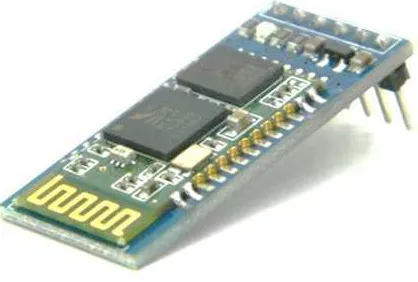
2.6 Modul Bluetooth HC 05
Modul bluetooth seri HC memiliki banyak jenis atau varian, yang secara garis
besar terbagi menjadi dua yaitu jenis ‘industrial series’ yaitu HC-03 dan HC-04 serta
‘civil series’ yaitu HC-05 dan HC-06. Modul Bluetooth serial, yang selanjutnya
disebut dengan modul BT saja digunakan untuk mengirimkan data serial TTL via
bluetooth. Modul BT ini terdiri dari dua jenis yaitu Master dan Slave.
Gambar 7 Modul HC – 05
Seri modul BT HC bisa dikenali dari nomor serinya, jika nomer serinya genap
maka modul BT tersebut sudah diset oleh pabrik, bekerja sebagai slave atau master
dan tidak dapat diubah mode kerjanya, contoh adalah HC-06-S. Modul BT ini akan
bekerja sebagai BT Slave dan tidak bisa diubah menjadi Master, demikian juga
sebaliknya misalnya HC-04M. Default mode kerja untuk modul BT HC dengan seri
genap adalah sebagai Slave.
Sedangkan modul BT HC dengan nomer seri ganjil, misalkan HC-05, kondisi
default biasanya diset sebagai Slave mode, tetapi pengguna bisa mengubahnya
menjadi mode Master dengan AT Command tertentu.
Penggunaan utama dari modul BT ini adalah menggantikan komunikasi serial
via kabel, sebagai contoh:
1. Jika akan menghubungkan dua sistem mikrokontroler agar bisa berkomunikasi
via serial port maka dipasang sebuah modul BT Master pada satu sistem dan
modul BT Slave pada sistem lainnya. Komunikasi dapat langsung dilakukan
setelah kedua modul melakukan pairing. Koneksi via bluetooth ini menyerupai
2. Jika sistem mikrokontroler dipasangi modul BT Slave maka ia dapat
berkomunikasi dengan perangkat lain semisal PC yang dilengkapi adapter BT
ataupun dengan perangkat ponsel, smartphone dan lain-lain
3. Saat ini banyak perangkat seperti printer, GPS modul dan lain-lain yang bekerja
menggunakan media bluetooth, tentunya sistem mikrokontroler yang dilengkapi
dengan BT Master dapat bekerja mengakses device-device tersebut.
Pemakaian module BT pada sistem komunikasi baik antar dua sistem
mikrokontrol maupun antara suatu sistem ke device lain tidak perlu menggunakan
driver, tetapi komunikasi dapat terjadi dengan dua syarat yaitu :
1. Komunikasi terjadi antara modul BT Master dan BT Slave, komunikasi tidak akan
pernah terjadi jika kedua modul sama-sama Master atau sama-sama Slave, karena
tidak akan pernah pairing diantara keduanya.
2. Password yang dimasukkan cocok
Modul BT yang banyak beredar di sini adalah modul HC-06 atau sejenisnya
dan modul HC-05 dan sejenisnya. Perbedaan utama adalah modul HC-06 tidak bisa
mengganti mode karena sudah diset oleh pabrik, selain itu tidak banyak AT
Command dan fungsi yang bisa dilakukan pada modul tersebut. Diantaranya hanya
bisa mengganti nama, baud rate dan password saja.
Sedangkan untuk modul HC-05 memiliki kemampuan lebih yaitu bisa diubah
mode kerjanya menjadi Master atau Slave serta diakses dengan lebih banyak AT
Command, modul ini sangat direkomendasikan, terutama dengan flexibilitasnya
dalam pemilihan mode kerjanya.
Bluetooth Modul HC-06 merupakan komunikasi nirkabel pada frekuensi
2,4GHz dengan default koneksi hanya sebagai SLAVE. Sangat mudah digunakan
dengan mikrokontroler untuk membuat membuat aplikasi wireles. Interface yang
digunakan adalah RX, TX, VCC dan GND. Built in LED sebagai indicator koneksi
Bluetooth.
Tegangan input antara 3.6-6 V, arus saat unpaired sekitar 30mA, dan saat paired
(terhubung) sebesar 10mA. 4 pin interface 3.3V dapat langsung dihubungkan ke
berbagai macam mikrokontroler (khusus Arduino, 8051, 8535, AVR, PIC, ARM,
10 meter, namun kualitas koneksi makin berkurang. Spesifikasi chip utama
menggunakan CSR Bluetooth,
1. stanrdar protocol Bluetooth V2.0
2. Tegangan operasi 3.3V
3. Penggunaan dapat mengatur baud rate
4. Ukuran 28mm x 15mm x 2.35mm
5. Konsumsi arus : pairing 30 – 40 mA, dipasangkan tidak berkomunikasi 2 – 8 mA,
Komunikasi 8mA
6. dapat digunakan dengan komputer, Bluetooth laptop, PDA/smartphone,
mikrokontroler/aurdino dan perangkat lain untuk komunikasi.
2.7. Mosfet
MOSFET (Metal Oxide Semiconductor Field Effect Transistor) adalah
suatu transistor dari bahan semikonduktor (silikon) dengan tingkat konsentrasi
ketidakmurnian tertentu. Tingkat dari ketidakmurnian ini akan menentukan
jenis transistor tersebut, yaitu transistor MOSFET tipe-N (NMOS) dan
transistor MOSFET tipe-P (PMOS). Bahan silicon digunakan sebagai landasan
(substrat) dari penguras (drain), sumber (source), dan gerbang (gate).
Selanjutnya transistor dibuat sedemikian rupa agar antara substrat dan
gerbangnya dibatasi oleh oksida silikon yang sangat tipis. Oksida ini
diendapkan di atas sisi kiri dari kanal, sehingga transistor MOSFET akan
mempunyai kelebihan dibanding dengan transistor BJT (Bipolar Junction
Transistor), yaitu menghasilkan disipasi daya yang rendah.
2.7.1. Jenis jenis Mosfet
MOSFET (Metal Oxide Semiconductor Field Effect Transistor)
adalah suatu transistor dari bahan semikonduktor (silikon) dengan tingkat
konsentrasi ketidakmurnian tertentu. Tingkat dari ketidakmurnian ini akan
menentukan jenis transistor tersebut, yaitu transistor MOSFET tipe-N (NMOS)
digunakan sebagai landasan (substrat) penguras (drain), sumber (source), dan
gerbang (gate). Selanjutnya transistor ini dibuat sedemikian rupa agar antara
substrat dan gerbangnya dibatasi oleh oksida silicon yang sangat tipis. Oksida
ini diendapkan di atas sisi kiri kanal, sehingga transistor MOSFET akan
mempunyai kelebihan dibanding dengan transistor BJT (Bipolar Junction
Transistor), yaitu menghasilkan disipasi daya yang rendah. Bila dilihat dari
cara kerjanya, transistor MOS dapat dibagi menjadi dua, yaitu:
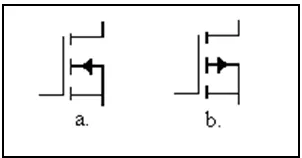
1. Transistor Mode Pengosongan (Transistor Mode Depletion)
Pada transistor mode depletion, antara drain dan source terdapat saluran
yang menghubungkan dua terminal tersebut, dimana saluran tersebut
mempunyai fungsi sebgai saluran tempat mengalirnya elektron bebas. Lebar
dari saluran itu sendiri dapat dikendalikan oleh tegangan gerbang. Transistor
MOSFET mode pengosongan terdiri dari tipe-N dan tipe-P, simbol transistor
ditunjukkan dalam Gambar dibawah ini.
Gambar 8 Simbol Transistor MOSFET Mode Depletion
(a). N-Channel Depletion (b). P-Channel Depletion
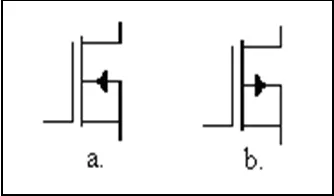
2. Transistor Mode peningkatan (Transistor Mode Enhancement)
Transistor mode enhancement ini pada fisiknya tidak memiliki saluran
antara drain dan sourcenya karena lapisan bulk meluas dengan lapisan SiO2
pada terminal gate. Transistor MOSFET mode peningkatan terdiri dari tipe-N
Gambar 9 Simbol Transistor MOSFET Mode Enhancement
(a). N-Channel Enhancement (b). P-Channel Enhancement
Dilihat dari jenis saluran yang digunakan, transistor MOSFET dapat
dikelompokan menjadi tiga, antara lain:
1) NMOS
Transistor NMOS terbuat dari substrat dasar tipe p dengan daerah source dan drain
didifusikan tipe n+ dan daerah kanal terbentuk pada permukaan tipe n. NMOS yang
umumnya banyak digunakan adalah NMOS jenis enhancement, dimana pada jenis ini
source NMOS sebagian besar akan dihubungkan dengan –Vss mengingat struktur
dari MOS itu sendiri hampir tidak memungkinkan untuk dihubungkan dengan +Vdd.
Dalam aplikasi gerbang NMOS dapat dikombinasikan dengan resistor, PMOS, atau
dengan NMOS lainnya sesuai dengan karakteristik gerbang yang akan dibuat.
Sebagai contoh sebuah NMOS dan resistor digabungkan menjadi sebuah gerbang
NOT.
Negatif MOS adalah MOSFET yang mengalirkan arus penguras sumber
menggunakan saluran dari bahan electron, sehinga arus yang mengalir jika tegangan
gerbang lebih positif dari substrat dan nilai mutlaknya lebih besar dari VT(Voltage
Gambar 10 Skematik MOSFET tipe-n
2) PMOS
Transistor PMOS terbuat dari substrat dasar tipe-n dengan daerah source dan
drain didifusikan tipe p+ dan deerah kanal terbentuk pada permukaan tipe p. Positif
MOS adalah MOSFET yang mengalirkan arus penguras sumber melalui saluran
positif berupa hole, dimana arus akan mengalir jika tegangan gerbang lebih negative
terhadap substrat dan nilai mutlaknya lebih besar dari VT. PMOS yang umumnya
banyak digunakan adalah PMOS jenis enhancement, dimana pada jenis ini source
PMOS sebagian besar akan dihubungkan dengan +Vdd mengingat struktur dari MOS
itu sendiri hampir tidak memungkinkan untuk dihubungkan dengan -Vss. Dalam
aplikasi gerbang PMOS dapat dikombinasikan dengan resistor, NMOS, atau dengan
PMOS lainnya sesuai dengan karakteristik gerbang yang akan dibuat. Sebagai contoh
sebuah PMOS dan resistor digabungkan menjadi sebuah gerbang NOT.
3) CMOS (Complementary MOS)
MOSFET tipe complementary ini mengalirkan arus penguras sumber melalui
saluran tipe-n dan tipe-p secara bergantian sesuai dengan tegangan yang dimasukkan
pada gerbangnya (gate).
2.7.2. Bentuk Dasar MOSFET
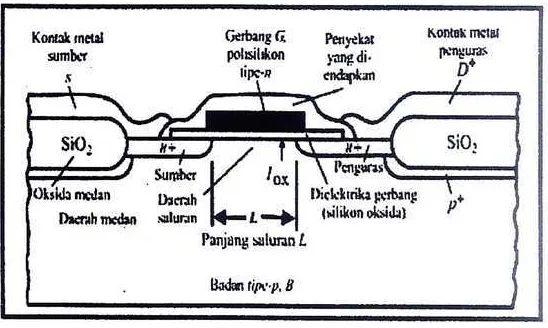
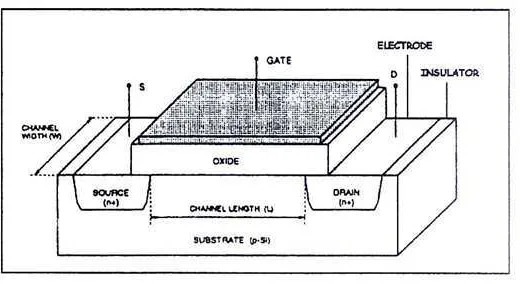
NMOS tipe Enhancement yaitu Struktur transistor NMOS terdiri atas
substrat tipe-p dengan daerah source dan drain diberi difusi n+. Diantara daerah
yang ditutupi oleh lapisan tang penghantar (isolator) yang terbuat dari SiO2. Panjang
channel disebut Length (L) dan lebarnya disebut Width (W). Gerbang (gate) terbuat
dari polisilikon dan ditutup oleh penyekat yang diendapkan.
Struktur transistor NMOS terdiri atas substrat tipe-p dan tipe-n. kedua
parameter ini sangat penting untuk mengontrol MOSFET. Parameter yang tidak
kalah penting adalah ketebalan lapisan oksida yang menutupi daerah channel (tox).
Di atas lapisan insulating tersebut didepositkan polycrystalline silicon (polysilicone)
electrode, yang disebut dengan gerbang (gate). struktur fisik NMOSFET tipe
enhancement ditunjukkan dalam Gambar dibawah ini.
Gambar 11 Struktur fisik N-MOSFET tipe Enhancement
PMOS tipe Enhancement yaitu Struktur transistor PMOS terdiri atas substrat tipe-n
dengan daerah source dan drain diberi difusi p+, dan untuk kondisi yang lain adalah