BAB II
TINJAUAN PUSTAKA
2.1. Sampah
Sampah merupakan material sisa yang tidak diinginkan setelah berakhirnya suatu proses. Sampah merupakan konsep buatan manusia, dalam proses-proses alam tidak ada sampah, yang ada hanya produk-produk yang tak bergerak. Sampah dapat berada pada setiap fase materi: padat, cair, atau gas. Ketika dilepaskan dalam dua fase yang disebutkan terakhir, terutama gas, sampah dapat dikatakan sebagai emisi. Emisi biasa dikaitkan dengan polusi. Dalam kehidupan manusia, sampah dalam jumlah besar datang dari aktivitas industri (dikenal juga dengan sebutan limbah), misalnya pertambangan,
manufaktur, dan konsumsi. Hampir semua produk industri akan menjadi sampah pada suatu waktu, dengan jumlah sampah yang kira-kira mirip dengan jumlah konsumsi (Dewantoro, O.B 2009).
2.2. Arduino
Arduino merupakan perangkat keras modul yang di rangkai untuk dapat mengontrol sesuatu kegiatan. Arduino merupakan kumpulan komponen yang terdiri dari mikrokontroler sebagai komponen utama. Arduino dikatakan sebagai sebuah platform dari physical computing yang bersifat open source. Arduino tidak hanya sebuah alat pengembangan, tetapi kombinasi dari hardware, bahasa pemrograman Integrated
Development Environment (IDE) yang canggih (Girsang, W.S. 2014).
IDE adalah sebuah software yang sangat berperan untuk menulis program,
meng-compile menjadi kode biner dan meng-upload ke dalam memory mikrokontroler. Ada banyak projek dan alat-alat dikembangkan oleh akademisi dan profesional dengan
tampilan, penggerak dan sebagainya) yang dibuat oleh pihak lain untuk bisa disambungkan dengan Arduino (Girsang, W.S. 2014).
Komponen utama di dalam papan Arduino adalah sebuah mikrokontroler 8 bit dengan merk ATmega yang dibuat oleh perusahaan Atmel Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega2560 (Girsang, W.S. 2014).
Bahasa pemrograman arduino adalah bahasa pemrograman yang umum digunakan untuk membuat perangkat lunak yang ditanamkan pada arduino board. Bahasa pemrograman arduino mirip dengan bahasa pemrograman C++(Simanjuntak, M.G. 2013).
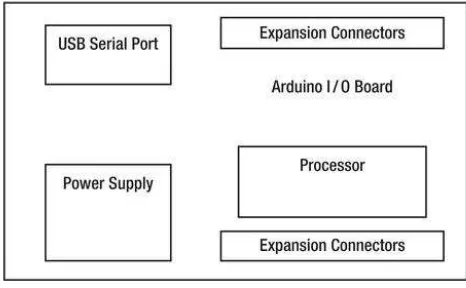
Gambar 2.1 Diagram Blok Arduino Board (Simanjuntak, M.G. 2013).
Blok-blok diatas dijelaskan sebagai berikut:
1. Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422 dan RS-485. 2. 2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan),
digunakan oleh variable-variabel di dalam program.
3. 32KB flash memory bersifat non-volatile, digunakan untuk flash memory juga menyimpan bootloader. Bootloader adalah program inisialisasi yang dijalankan
oleh CPU saat daya dihidupkan. 4. 1KB EEPROM bersifat non-volatile.
Arduino Development Environment adalah perangkat lunak yang digunakan untuk menulis dan meng-compile program untuk arduino. Arduino Development Environment juga digunakan untuk meng-upload program yang sudah di-compile ke memori program arduino board (Simanjuntak, M.G. 2013).
2.3. Arduino Nano
Arduino nano adalah salah satu varian dari produk board mikrokontroller keluaran Arduino. Arduino nano adalah board Arduino terkecil, menggunakan mikrokontroller Atmega328 untuk Arduino Nano 3.x dan Atmega168 untuk Arduino Nano 2.x. Varian
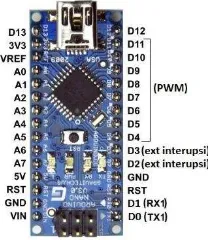
ini mempunyai rangkaian yang sama dengan jenis Arduino Duemilanove, tetapi dengan ukuran dan desain PCB yang berbeda. Arduino Nano tidak dilengkapi dengan soket catudaya, tetapi terdapat pin untuk catu daya luar atau dapat menggunakan catu daya dari mini USB port. Arduino nano memiliki 14 pin digital (6 pin dapat digunakan sebagai output PWM), 6 input analog, sebuah 16 MHz osilator kristal, sebuah koneksi USB, sebuah konektor sumber tegangan, sebuah header ICSP, dan sebuah tombol reset. Arduino Nano dapat diberi tenaga dengan power yang diperoleh dari koneksi kabel Mini-B USB, atau via power supply eksternal. External power supply dapat dihubungkan langsung ke pin 30 atau Vin (unregulated 6V - 20V), atau ke pin 27 (regulated 5V). Sumber tenaga akan otomatis dipilih mana yang lebih tinggi tegangan Tampak atas dari arduino uno dapat dilihat pada Gambar 2.2(Simanjuntak, M.G. 2013).
Gambar 2.2 Board Arduino Nano (Simanjuntak, M.G. 2013).
Berikut ini adalah konfigurasi dari Arduino UNO:
1. Mikrokontroler : ATmega328 2. Tegangan Operasi : 5V
4. Pin digital I/O : 14 (6 diantaranya pin PWM) 5. Pin Analog input : 6
6. Arus DC per pin I/O : 40 mA 7. Arus DC untuk pin 3.3 V : 150 mA
8. Flash Memory : 32 KB dengan 0.5 KB digunakan untuk bootloader 9. SRAM : 2 KB
kualifikasi khusus yang sesuai dengan aplikasi “servoing” didalam teknik kontrol.
Dalam kamus Oxford istilah ”servo” diartikan sebagai “a mechanism that controls a
large mechanism” (Pitowarno, E. 2006).
Tidak ada spesifikasi baku yang disepakati untuk menyatakan bahwa suatu motor DC-MP adalah motor DC-SV juga dikehendaki handal beroperasi dalam lingkup torsi yang berubah-ubah (Pitowarno, E. 2006). Beberapa tipe motor servo yang dijual bersama dengan paket rangkaian drivernya telah memiliki rangkaian control kecepatan yang menyatu didalamnya. Putaran motor tidak lagi berdasarkan tegangan supply ke
motor, namun berdasarkan tegangan input khusus yang berfungsi sebagai referensi kecepatan output (Pitowarno, E. 2006).
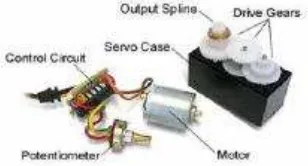
Gambar 2.3 Komponen Motor Servo (Pitowarno, E. 2006).
Servo motor dc mempunyai konstruksi yang sama dengan konstruksi motor dc. Dalam motor dc konvensional sikat dan cincin belah merupakan suatu kerugian. Karena ada gesekan antara sikat dan cincin maka akan terjadi rugi gesek, timbulnya percikan api dan terkikisnya sikat arang maupun cincin. Maka mulai dipikirkan motor dc tanpa sikat atau disebut brushless DC Motor.
Brushless DC Motor dapat diwujudkan dengan menggunakan prinsip kerja motor induksi 3 phasa (tanpa sikat dan cincin). Dengan menambahkan komponen permanent magnet, electronic inverter (yang menimbulkan medan putar) dan position control (umumnya menggunakan sensor effek Hall), maka akan didapatkan motor dc brushless. Jadi disini rangkaian inverter dan kontrol posisi berfungsi sebagai pengganti komutator mekanik (sikat & cincin belah) dalam membalik medan. Motor dc brushless ini mempunyai karateristik yang mendekati dc motor konvensional.Untuk mengerti cara kerja Motor Servo DC Magnet Permanen haruslah dimengerti bagaimana prinsip kerja Motor DC Magnet Permanen, Motor DC tanpa sikat dan medan putar (Iqbal, M. 2015). Ada beberapa jenis-jenis motor servo yaitu:
1. Motor Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan–tengah–kiri adalah180°.
Gambar 2.4 Motor Servo (Iqbal, M. 2015).
Pengendalian gerakan batang motor servo dapat dilakukan dengan menggunakan metode PWM. (Pulse Width Modulation). Teknik ini menggunakan
system lebar pulsa untuk mengemudikan putaran motor. Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
2.5. Modul ISD1820
Modul ISD1820 adalah Sound Recording/Playback Module yang dapat merekam dan memainkan ulang rekaman audio dengan media penyimpanan terintegrasi (non-volatile memory) yang terintegrasi dalam chip tunggal ISD1820 ini.
Gambar 2.6 Modul ISD1820 (Fauren, R., Jaya p., Budayawan, k. 2016).
Sampel suara yang dapat direkam antara 8 hingga 20 detik (bisa satu sampel panjang / beberapa sampel pendek). Panjang rekaman maksimum ini ditentukan berdasarkan kualitas suara yang dapat dipilih antara 3,2 kHz (max 20 detik) hingga 8 kHz (max 8 detik). ISD1820 telah dilengkapi dengan mikrofon untuk melakukan perekaman langsung. Tekan dan tahan tombol REC untuk merekam, lepaskan saat rekaman selesai dilakukan. Untuk mengubah durasi rekaman dapat dilakukan dengan menambahkan resistor eksternal. (Fauren, R., Jaya, p., Budayawan, k. 2016)
2.6. Sensor Ultrasonik HCSR-04
Sensor ultrasonik adalah sensor yang mempunyai frekuensi 40 khz dan banyak digunakan untuk aplikasi atau kontes robot cerdas.Sensor jarak ini menggunakan sonar (gelombang ultrasonik) untuk menentukan jarak dari benda yang berada di depannya.
(Setiawan, D.S.T. & Iqbal, M. 2014)
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit
diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan yang akan mengarah pada jalur bolak - balik dengan frekuensi yang sama (Hani, S. 2010).
Besar amplitudo sinyal elektrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima.Proses sensing yuang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara.Waktu di hitung ketika pemencar aktif dan
sampai ada input dari rangkaian penerima dan bila pada melebihi batas waktu tertentu rangkaian penerima tidak ada sinyal input maka dianggap tidak ada halangan
didepannya.( Kusumaningsih, D. & Malik, R. 2014)
Gambar 2.7 Sensor Ultrasonik (Kusumaningsih, D. & Malik, R. 2014).
Pengukuran jarak berbasis ultrasonik dapat dilakukan dengan dua metode yaitu: 1. Perhitungan waktu tempuh (ElecFreaks 2015).
Pada medium rambat udara, gelombang ultrasonik memiliki kecepatan tempuh 340 m/s. Berdasarkan nilai tersebut, pengukuran jarak dapat dilakukan dengan mengamati waktu tempuh gelombang dari transmitter hingga diterima oleh receiver. Mengingat jarak yang ditempuh gelombang bersifat bolak-balik, maka perhitungan jarak metode ini berdasarkan datasheet sensor adalah:
2. Perhitungan jumlah pulsa (ElecFreaks 2015).
Transmitter akan mengeluarkan deretan pulsa burst dengan nilai tertentu saat diberikan pulsa trigger. Untuk setiap satu sentimeter, jumlah pulsa yang dihasilkan adalah 29 pulsa, sehingga jarak tempuh total dapat dihitung berdasarkan jumlah pulsa yang diterima oleh receiver. Seperti halnya metode pertama, jalan tempuh deretan pulsa bersifat bolak-balik sehingga perhitungannya berdasarkan datasheet menjadi:
Distance = pulse count ÷58cm.
Hal-hal yang dapat menyebabkan sensor ultrasonic tidak teliti untuk mengukur jarak suatu objek adalah sebagai berikut :
1. Jarak objek tersebut diluar jangkauan ukur (< 3cm atau > 300cm).
2. Sudut objek terhadap sensor (θ) < 45°, sudut yang terlalu kecil antara sensor jarak ultrasonik dan objek sehingga gelombang ultrasonik tidak dapat dipantulkan kembali ke sensor.
3. Objek tersebut terlalu kecil untuk memantulkan gelombang ultrasonik kembali ke sensor,
4. Jenis material objek yang bersifat meredam suara, bentuk permukaan yang tidak beraturan, sudut ruangan, dan lain- lain sehingga mungkin tidak dapat memantulkan gelombang ultrasonik yang cukup untuk dideteksi dengan teliti (Budiharto, W. 2009).
2.7.LED (Light Emitting Diode)
Light Emmiting Dioda atau lebih dikenal dengan sebutan LED (light-emitting diode) adalah suatu semikonduktor yang memancarkan cahaya monokromatik yang tidak
koheren ketika diberi tegangan maju. Gejala ini termasuk bentuk elektroluminesensi. Warna yang dihasilkan bergantung pada bahan semikonduktor yang dipakai, dan bisa juga dekat ultraviolet, tampak, atau inframerah (Dewi, S.K. 2013).
LED dulu umumnya digunakan pada gadget seperti ponsel serta komputer. Sebagai pesaing lampu bohlam dan neon, saat ini aplikasinya mulai terus meluas dan bahkan bisa kita temukan pada korek api yang kita gunakan, lampu emergency dan sebagainya. LED sebagai model lampu masa depan dianggap dapat menekan pemanasan global karena efesiensinya (Dewi, S.K. 2013).
Gambar 2.8 LED (Light Emitting Diode) dan Simbolnya (Dewi, S.K. 2013).
2.8.ISIS & ARES Proteus 8.5
Proteus adalah sebuah software untuk mendesain PCB yang dilengkapi dengan simulasi Pspice pada level skematik sebelum rangkaian skematik di-upgrade ke PCB, sehingga kita tahu apakah PCB yang akan dicetak sudah benar atau tidak. Proteus mampu mengkombinasikan program ISIS untuk membuat skematik desain rangkaian dengan program ARES untuk membuat layout PCB dari skematik yang telah dibuat.
Fitur-fitur dari PROTEUS adalah sebagai berikut:
1. Memiliki kemampuan untuk mensimulasikan hasil rancangan baik digital
maupun analog maupun gabungan keduanya,
2. Mendukung simulasi yang menarik dan simulasi secara grafis
3. Mendukung simulasi berbagai jenis microcontroller seperti PIC, 8051 series. 4. Memiliki model-model peripheral yang interactive seperti LED, tampilan LCD,
RS232, dan berbagai jenis library lainnya.
5. Mendukung instrument-instrument virtual seperti voltmeter, ammeter, oscciloscope, logic analyser, dll,
6. Memiliki kemampuan menampilkan berbagi jenis analisis secara grafis seperti transient, frekuensi, noise, distorsi, AC dan DC, dll.
8. Mendukung pembuatan PCB yang di-update secara langsung dari program ISIS ke program pembuat PCB-ARES.
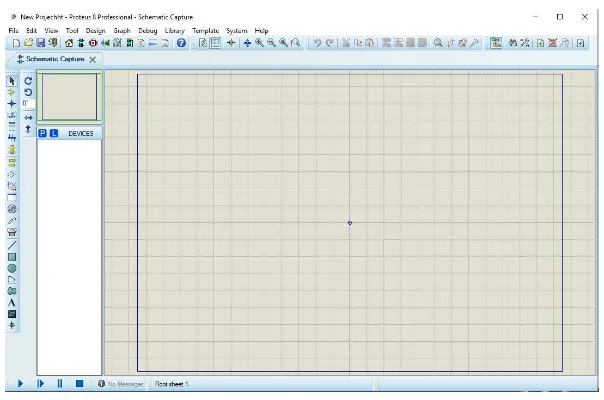
Proteus ISIS merupakan program terintegrasi dengan proteus yang menjadi program utama pada software proteus. ISIS dirancang untuk membuat sebuah skematik rangkaian elektronika dan dapat menyimulasikan rangkaian dengan memberikan sebuah program ke dalam sebuah mikroprosesor. Proteus ISIS dapat dilihat pada gambar 2.9.
Gambar 2.9 Tampilan Software Proteus ISIS
Proteus ARES merupakan tempat untuk membuat layout PCB berdasarkan skematik rangkaian elektronika yang telah dibuat di ISIS. Software Proteus ARES dapat dilihat pada gambar 2.10.
2.9. Arduino Development Environment
Arduino Development Environment adalah sebuah perangkat lunak yang memudahkan kita mengembangkan aplikasi mikrokontroler mulai dari menuliskan source program, kompilasi, upload hasil kompilasi, dan uji coba secara terminal serial. Arduino
Development Environment terdiri dari editor teks untuk menulis kode, sebuah area pesan, sebuah konsol, sebuah toolbar dengan tombol-tombol untuk fungsi yang umum dan beberapa menu. Arduino Development Environment terhubung ke arduino board untuk meng-upload program dan juga untuk berkomunikasi dengan arduino board. Arduino Development Environment dapat dilihat pada gambar 2.11.