Abstrak— Kebutuhan energi di dunia makin lama ini semakin bertambah, tidak terkecuali dengan energi listrik. Energi listrik didapatkan dengan mengubah energi kinetik dari prime mover menjadi energi listrik oleh generator, dengan semakin banyaknya kebutuhan energi listrik maka harus dibuatlah generator lain agar kekurangan energi listrik dapat teratasi. Generator tersebut saling berhubungan secara paralel di dalam sistem. Adanya hubungan paralel membuat setiap generator harus bekerja sinkron satu dengan yang lainnya. Pada tugas akhir ini membahas cara menghitung Critical Clearing Time (CCT). CCT adalah waktu yang diijinkan untuk memutus gangguan agar generator tidak mengalami lepas sinkron. Metode yang dipakai adalah metode Time Domain Simulation dengan sebagai pedomannya adalah perubahan dari sudut rotor generator sewaktu terjadi gangguan dalam sistem, selain itu diamati juga mengenai adanya pengaruh damping dalam kestabilan sistem. Dari melakukan simulasi dengan menggunakan program MATLAB. Hasil dari simulasi ini menunjukkan bahwa adanya damping didalam sistem menyebabkan membuat lebih stabil sistem, sehingga nilai CCT antara sistem yang ber-damping dengan sistem yang tidak menggunakan damping memiliki nilai CCT yang lebih besar pada sistem yang menggunakan damping .
Kata kunci: Critical Clearing Time (CCT), Time Domain Simulation, damping, Kestabilan sistem.
.
I. PENDAHULUAN
A. Latar Belakang
Kebutuhan energi listrik semakin meningkat seiring dengan meningkatnya pemanfaatan tenaga listrik pada rumah tangga, industri, dan lain lain. Untuk mengatasi hal tersebut, pasokan listrik harus ditambah, yakni dengan pembangunan pembangkit listrik baru. Dalam hal ini, sistem tenaga listrik terdiri dari beberapa pembangkit dengan kapasitas unit-unit pembangkit yang relatif besar dan terletak cukup berjauhan satu dengan yang lainnya. Sehingga sistem harus dijaga kestabilannya berdasarkan parameter kestabilan sudut rotor, kestabilan frekuensi, dan kestabilan tegangan. Dalam tugas akhir ini hanya membahas salah satu parameter kestabilan dalam sistem tenaga listrik, yaitu kestabilan sudut rotor.
Stabilitas adalah kemampuan dari generator untuk mempertahankan sinkronisasi dan keseimbangan sistem. Keadaan sinkron merupakan keadaan dimana selisih daya mekanik dan daya elektrik dari generator sama dengan nol.
Ketika adanya pelepasan beban maupun adanya penambahan beban, selisih antara daya mekanik dan daya elektrik telah berubah. Hal ini menyebabkan adanya percepatan atau perlambatan rotor. Maka sudut rotor akan berubah, jika tidak segera diatasi akan menyebabkan adanya loss sinkron pada generator.
Akibat adanya perubahan kondisi kerja dari sistem ini, maka keadaan sistem akan berubah dari keadaan lama ke keadaan baru. Periode singkat di antara kedua keadaan tersebut disebut periode paralihan atau transient. Stabilitas transient didasarkan pada kondisi kestabilan ayunan pertama (first swing) dengan periode waktu penyelidikan pada detik pertama terjadinya gangguan. Ketika ayunan pertama terjadi, keadaan kontrol (governor) masih belum bekerja, sehingga daya mekanik diasumsikan konstan. Oleh karena itu, diperlukan suatu analisa sistem tenaga listrik untuk menentukan kestabilan sistem tersebut pada saat terjadi gangguan, yaitu dengan menentukan “Critical Clearing Time” (CCT). Metode yang digunakan adalah “Time Domain Simulation”.
B. Tujuan
Tujuan yang hendak dicapai dalam tugas akhir ini adalah untuk mengetahui cara menggunakan metode Time Domain Simulation dalam menentukan kestabilan sistem, memperoleh besarnya nilai CCT, dan memperoleh perbandingan besarnya CCT di sistem yang menggunakan damping maupun yang tidak menggunakan damping.
C. Batasan Masalah
Permasalahan yang akan dibahas dalam Tugas Akhir ini adalah :
1. Bagaimana menggunakan Time Domain Simulation Method untuk menentukan kestabilan sistem tenaga listrik. 2. Menghitung besarnya CCT dalam sistem.
3. Membandingkan besarnya CCT di sistem yang menggunakan damping maupun yang tidak menggunakan damping
II. KESTABILAN
A. Pengertian Kestabilan
Kestabilan adalah kemampuan dari suatu sistem tenaga listrik atau bagian komponennya untuk mempertahankan sinkronisasi dan keseimbangan dalam sistem. Jika kerja
Perhitungan Critical Clearing Time dengan
Menggunakan Metode Time Domain Simulation
Surya Atmaja, Dr. Eng. Ardyono Priyadi, ST, M.Eng,Ir.Teguh Yuwono
Jurusan Teknik Elektro
,Fakultas Teknik Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
generator tidak sinkron, maka generator akan lepas dari sistem. Kerja generator yang stabil dapat diamati dari selisih antara daya mekanis dengan daya elektris, idealnya dinamakan sinkron jika daya mekanis sama dengan daya elektris (selisihnya adalah nol). Jika terdapat keseimbangan antara daya mekanis pada prime mover dengan daya output listrik (beban listrik) pada sistem, maka dalam keadaan ini semua generator berputar pada kecepatan sinkron.
B. Kestabilan Sudut Rotor
Kestabilan sudut rotor adalah kemampuan dari mesin sinkron untuk mempertahankan kesinkronannya dengan cara menjaga keseimbangan antara torsi mekanik dengan torsi elektrik. Sistem tenaga listrik pada umumnya terdiri atas interkoneksi antara mesin-mesin sinkron. Pada operasi normal, mesin-mesin tersebut bekerja dalam keadaan sinkron, yaitu berusaha untuk saling mempertahankan frekuensi sinkron dan mempertahankan perbedaan sudut daya konstan antara masing-masing mesin.
Karakteristik yang paling penting dalam kestabilan tenaga listrik adalah karakteristik hubungan daya dengan posisi rotor pada mesin sinkron. Hubungan tersebut merupakan hubungan yang non-linear.
Kestabilan sudut dapat dibagi menjadi dua, yaitu: 1. Small Signal Stability
Small Signal Stability adalah kemampuan dari suatu sistem tenaga listrik untuk mempertahankan sinkronisasi antara mesin-mesin dalam sistem sewaktu mengalami gangguan kecil. Gangguan tersebut disebabkan oleh perubahan kecil di pembangkit dan beban.
2. Transient Stability
Kestabilan Transient adalah kemampuan dari sistem tenaga listrik mempertahankan sinkronisasinya setelah mengalami gangguan besar yang bersifat mendadak selama sekitar satu swing pertama dengan asumsi bahwa pengatur tegangan otomatis atau AVR dan Governor belum bekerja.
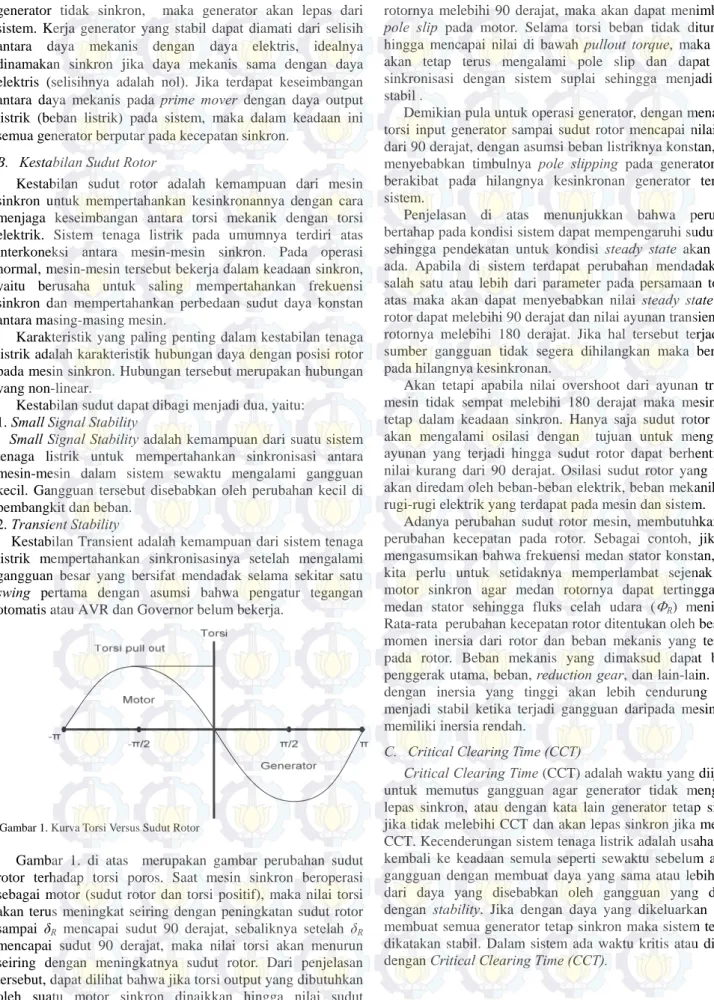
Gambar 1. Kurva Torsi Versus Sudut Rotor
Gambar 1. di atas merupakan gambar perubahan sudut rotor terhadap torsi poros. Saat mesin sinkron beroperasi sebagai motor (sudut rotor dan torsi positif), maka nilai torsi akan terus meningkat seiring dengan peningkatan sudut rotor sampai δR mencapai sudut 90 derajat, sebaliknya setelah δR
mencapai sudut 90 derajat, maka nilai torsi akan menurun seiring dengan meningkatnya sudut rotor. Dari penjelasan tersebut, dapat dilihat bahwa jika torsi output yang dibutuhkan oleh suatu motor sinkron dinaikkan hingga nilai sudut
rotornya melebihi 90 derajat, maka akan dapat menimbulkan pole slip pada motor. Selama torsi beban tidak diturunkan hingga mencapai nilai di bawah pullout torque, maka motor akan tetap terus mengalami pole slip dan dapat lepas sinkronisasi dengan sistem suplai sehingga menjadi tidak stabil .
Demikian pula untuk operasi generator, dengan menaikkan torsi input generator sampai sudut rotor mencapai nilai lebih dari 90 derajat, dengan asumsi beban listriknya konstan, dapat menyebabkan timbulnya pole slipping pada generator yang berakibat pada hilangnya kesinkronan generator terhadap sistem.
Penjelasan di atas menunjukkan bahwa perubahan bertahap pada kondisi sistem dapat mempengaruhi sudut torsi, sehingga pendekatan untuk kondisi steady state akan selalu ada. Apabila di sistem terdapat perubahan mendadak pada salah satu atau lebih dari parameter pada persamaan torsi di atas maka akan dapat menyebabkan nilai steady state sudut rotor dapat melebihi 90 derajat dan nilai ayunan transien sudut rotornya melebihi 180 derajat. Jika hal tersebut terjadi dan sumber gangguan tidak segera dihilangkan maka berakibat pada hilangnya kesinkronan.
Akan tetapi apabila nilai overshoot dari ayunan transien mesin tidak sempat melebihi 180 derajat maka mesin akan tetap dalam keadaan sinkron. Hanya saja sudut rotor mesin akan mengalami osilasi dengan tujuan untuk mengurangi ayunan yang terjadi hingga sudut rotor dapat berhenti pada nilai kurang dari 90 derajat. Osilasi sudut rotor yang terjadi akan diredam oleh beban-beban elektrik, beban mekanik serta rugi-rugi elektrik yang terdapat pada mesin dan sistem.
Adanya perubahan sudut rotor mesin, membutuhkan juga perubahan kecepatan pada rotor. Sebagai contoh, jika kita mengasumsikan bahwa frekuensi medan stator konstan, maka kita perlu untuk setidaknya memperlambat sejenak rotor motor sinkron agar medan rotornya dapat tertinggal dari medan stator sehingga fluks celah udara (ΦR) meningkat. Rata-rata perubahan kecepatan rotor ditentukan oleh besarnya momen inersia dari rotor dan beban mekanis yang terkopel pada rotor. Beban mekanis yang dimaksud dapat berupa penggerak utama, beban, reduction gear, dan lain-lain. Mesin dengan inersia yang tinggi akan lebih cendurung untuk menjadi stabil ketika terjadi gangguan daripada mesin yang memiliki inersia rendah.
C. Critical Clearing Time (CCT)
Critical Clearing Time (CCT) adalah waktu yang diijinkan untuk memutus gangguan agar generator tidak mengalami lepas sinkron, atau dengan kata lain generator tetap sinkron jika tidak melebihi CCT dan akan lepas sinkron jika melebihi CCT. Kecenderungan sistem tenaga listrik adalah usaha untuk kembali ke keadaan semula seperti sewaktu sebelum adanya gangguan dengan membuat daya yang sama atau lebih besar dari daya yang disebabkan oleh gangguan yang disebut dengan stability. Jika dengan daya yang dikeluarkan sistem membuat semua generator tetap sinkron maka sistem tersebut dikatakan stabil. Dalam sistem ada waktu kritis atau di sebut dengan Critical Clearing Time (CCT).
III. METODOLOGI
Dalam tugas akhir ini, simulasi program menggunakan alur seperti flowchart di bawah ini:
Gambar 2. Diagram alir Metode Time Domain Simulation
CCT dapat dicari dengan beberapa tahapan, yaitu dengan Load Flow dan persamaan ayunan COA. Pada Load Flow, hasil yang didapatkan adalah tegangan tiap bus. Kemudian dari tegangan di bus generator, didapatkan tegangan internal generator. Tegangan internal generator digunakan untuk mencari daya mekanik dan daya elektrik generator yang nantinya masuk ke rumusan ayunan COA dimana rumusan COA adalah:
COA i
i T i ei mi i iM
P
D
M
P
P
M
i i
Dimana : iM
= Momen Inersia generator ke-ii
= Kecepatan rotor generator ke-imi
P
= Daya mekanik generator ke-iei
P
= Daya elektrik generator ke-i Dari rumusan COA didapatkan
yang kemudian dihitung ke dalam Rumusan Runge Kutta untuk didapatkan hasil integrasi yang berupa
.Kemudian
diplot terhadap
untuk memperoleh nilai CCT. Hasil analisa akan dibahas pada bab IV.IV. ANALISADANSIMULASI
A. Permodelan Sistem
Sistem yang digunakan dalam perhitungan Critical Clearing Time (CCT) menggunakan sistem interkoneksi 500 kV Jawa Bali dan sistem 3 generator 9 bus Fouad dan Anderson. Dari kedua sistem tenaga listrik tersebut akan dibandingkan hasil perhitungan CCT dan hasil perhitungan yang dipengaruhi oleh adanya damping pada sistem. Perhitungan CCT didasarkan pada saluran yang mengalami gangguan, yaitu dengan menganalisa besarnya CCT yang didapatkan di setiap titik gangguan.
Titik gangguan dipilih secara acak, pada sistem interkoneksi 500 kV Jawa-Bali terdapat 16 titik gangguan, dan pada sistem 3 generator 9 bus Fouad dan Anderson terdapat 9 titik gangguan.
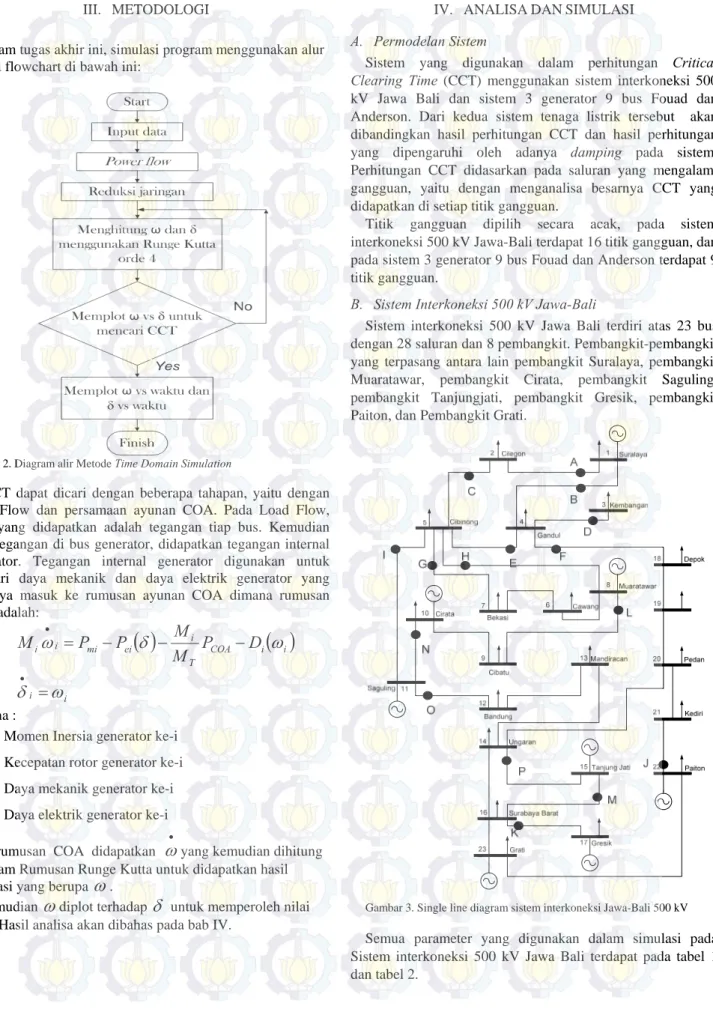
B. Sistem Interkoneksi 500 kV Jawa-Bali
Sistem interkoneksi 500 kV Jawa Bali terdiri atas 23 bus dengan 28 saluran dan 8 pembangkit. Pembangkit-pembangkit yang terpasang antara lain pembangkit Suralaya, pembangkit Muaratawar, pembangkit Cirata, pembangkit Saguling, pembangkit Tanjungjati, pembangkit Gresik, pembangkit Paiton, dan Pembangkit Grati.
Gambar 3. Single line diagram sistem interkoneksi Jawa-Bali 500 kV
Semua parameter yang digunakan dalam simulasi pada Sistem interkoneksi 500 kV Jawa Bali terdapat pada tabel 1 dan tabel 2.
1. Hasil Grafik Simulasi
Nilai CCT didapatkan antara waktu stabil denganwaktu tidak stabil . Hal ini dapat di lihat pada gambar 4.
Gambar 4. Grafik omega terhadap delta di titik A
Gambar 5. Grafik delta terhadap waktu di titik A sistem menggunakan damping dengan CCT 0.173-0.174
Gambar 6. Grafik delta terhadap waktu di titik A sistem tanpa damping dengan CCT 0.113-0.114
Gambar 7. Grafik omega terhadap waktu di titik A sistem stabil menggunakan damping dengan CCT 0.173-0.174
Gambar 8. Grafik omega terhadap waktu di titik A sistem tidak stabil menggunakan damping dengan CCT 0.173-0.174
Gambar 9. Grafik omega terhadap waktu di titik A sistem stabil tanpa damping dengan CCT 0.113-0.114
Tabel2.
Data Saluran Sistem interkoneksi 500 kV Jawa-Bali
DARI KE r x 1/2Bc 1 2 0,000626496 0,007008768 0 1 4 0,006513273 0,062576324 0,005989820 2 5 0,013133324 0,146925792 0,003530571 3 4 0,001513179 0,016928309 0 4 5 0,001246422 0,011975010 0 4 18 0,000694176 0,006669298 0 5 7 0,004441880 0,042675400 0 5 8 0,006211600 0,059678000 0 5 11 0,004111380 0,045995040 0,004420973 6 7 0,001973648 0,018961840 0 6 8 0,005625600 0,054048000 0 8 9 0,002822059 0,027112954 0 9 10 0,002739960 0,026324191 0 10 11 0,001474728 0,014168458 0 11 12 0,001957800 0,021902400 0 12 13 0,006990980 0,067165900 0,006429135 13 14 0,013478000 0,129490000 0,012394812 14 15 0,013533920 0,151407360 0,003638261 14 16 0,015798560 0,151784800 0,003632219 14 20 0,009036120 0,086814600 0 15 16 0,037539629 0,360662304 0,008630669 16 17 0,001394680 0,013399400 0 16 23 0,003986382 0,044596656 0 18 19 0,014056000 0,157248000 0,015114437 19 20 0,015311000 0,171288000 0,016463941 20 21 0,010291000 0,115128000 0,011065927 21 22 0,010291000 0,115128000 0,011065927 22 23 0,004435823 0,049624661 0,004769846 Tabel1. Data Generator BUS GEN r x H 1 0 0,1418445 5,19 8 0 0,0498565 1,82 10 0 0,0982143 2,86 11 0 0,2820233 1,64 15 0 0,484295 3,2 17 0 0,1869112 2,54 22 0 0,156781 4,42 23 0 0,2630799 2,7552381
Gambar 10. Grafik omega terhadap waktu di titik A sistem tidak stabil tanpa damping dengan CCT 0.113-0.114
Berdasarkan gambar 5 dan 6, hasil simulasi sistem Jawa-Bali 500 kV didapatkan bahwa adanya damping dapat memperkecil perubahan dari sudut rotor pada setiap kenaikan waktu, sehingga lebih menstabilkan generator . Hal ini ditunjukkan dari lebih lamanya hasil CCT . Berdasarkan hasil simulasi, didapatkan bahwa pada sistem yang menggunakan damping, kecepatan setelah gangguan akan teredam, sehingga mempercepat menuju kestabilan.
2. Hasil CCT Semua Titik
Simulasi dicoba pada titik yang lain sehingga didapatkan hasil seperti pada tabel 3 . Pada tabel 3 dapat dianalisa pada titik yang sama tetapi dengan kondisi yang berbeda yaitu dengan adanya pengaruh damping, bahwa nilai CCT yang didapatkan pada sistem yang menggunakan damping lebih lama dibandingkan dengan sistem yang tidak menggunakan damping.
i.
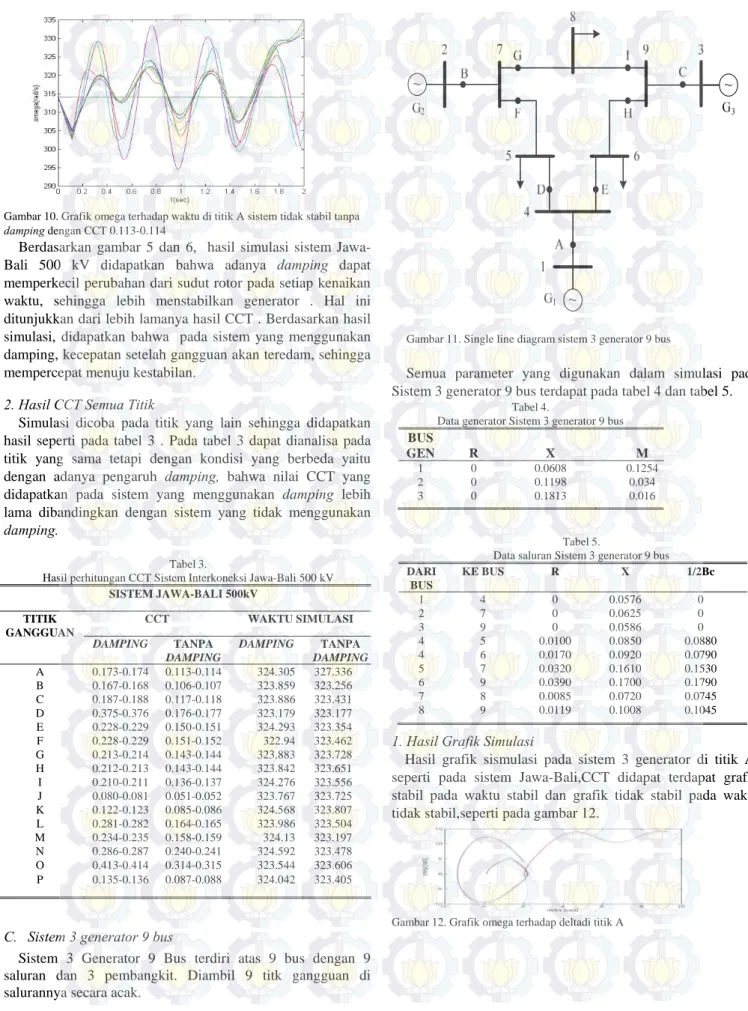
C. Sistem 3 generator 9 bus
Sistem 3 Generator 9 Bus terdiri atas 9 bus dengan 9 saluran dan 3 pembangkit. Diambil 9 titk gangguan di salurannya secara acak.
Gambar 11. Single line diagram sistem 3 generator 9 bus
Semua parameter yang digunakan dalam simulasi pada Sistem 3 generator 9 bus terdapat pada tabel 4 dan tabel 5.
1. Hasil Grafik Simulasi
Hasil grafik sismulasi pada sistem 3 generator di titik A, seperti pada sistem Jawa-Bali,CCT didapat terdapat grafik stabil pada waktu stabil dan grafik tidak stabil pada waktu tidak stabil,seperti pada gambar 12.
Gambar 12. Grafik omega terhadap deltadi titik A Tabel3.
Hasil perhitungan CCT Sistem Interkoneksi Jawa-Bali 500 kV
SISTEM JAWA-BALI 500kV TITIK GANGGUAN CCT WAKTU SIMULASI DAMPING TANPA DAMPING DAMPING TANPA DAMPING A 0.173-0.174 0.113-0.114 324.305 327.336 B 0.167-0.168 0.106-0.107 323.859 323.256 C 0.187-0.188 0.117-0.118 323.886 323.431 D 0.375-0.376 0.176-0.177 323.179 323.177 E 0.228-0.229 0.150-0.151 324.293 323.354 F 0.228-0.229 0.151-0.152 322.94 323.462 G 0.213-0.214 0.143-0.144 323.883 323.728 H 0.212-0.213 0.143-0.144 323.842 323.651 I 0.210-0.211 0.136-0.137 324.276 323.556 J 0.080-0.081 0.051-0.052 323.767 323.725 K 0.122-0.123 0.085-0.086 324.568 323.807 L 0.281-0.282 0.164-0.165 323.986 323.504 M 0.234-0.235 0.158-0.159 324.13 323.197 N 0.286-0.287 0.240-0.241 324.592 323.478 O 0.413-0.414 0.314-0.315 323.544 323.606 P 0.135-0.136 0.087-0.088 324.042 323.405 Tabel5.
Data saluran Sistem 3 generator 9 bus
DARI BUS KE BUS R X 1/2Bc 1 4 0 0.0576 0 2 7 0 0.0625 0 3 9 0 0.0586 0 4 5 0.0100 0.0850 0.0880 4 6 0.0170 0.0920 0.0790 5 7 0.0320 0.1610 0.1530 6 9 0.0390 0.1700 0.1790 7 8 0.0085 0.0720 0.0745 8 9 0.0119 0.1008 0.1045 Tabel4.
Data generator Sistem 3 generator 9 bus
BUS
GEN R X M
1 0 0.0608 0.1254 2 0 0.1198 0.034 3 0 0.1813 0.016
Gambar 13. Grafik delta terhadap waktu di titik A sistem menggunakan damping dengan CCT 0.572-0.573
Gambar 14. Grafik delta terhadap waktu di titik A sistem tanpa damping dengan CCT 0.470-0.471
Gambar 15. Grafik omega terhadap waktu di titik A sistem stabil menggunakan damping dengan CCT 0.572-0.573
Gambar 16. Grafik omega terhadap waktu di titik A sistem tidak stabil menggunakan damping dengan CCT 0.572-0.573
Gambar 17. Grafik omega terhadap waktu di titik A sistem stabil tanpa menggunakan damping dengan CCT 0.470-0.471
Gambar 18. Grafik omega terhadap waktu di titik A sistem tidak stabil tanpa damping dengan CCT 0.470-0.471
Berdasarkan gambar 13 dan 14, hasil simulasi sistem 3
generator 9 bus didapatkan bahwa adanya damping dapat memperkecil perubahan dari sudut rotor pada setiap kenaikan waktu, sehingga lebih menstabilkan generator . Hal ini ditunjukkan dari lebih lamanya hasil CCT . Berdasarkan hasil simulasi, didapatkan bahwa pada sistem yang menggunakan damping, kecepatan setelah gangguan akan teredam, sehingga mempercepat menuju kestabilan.
2. Hasil CCT Semua Titik
Simulasi dicoba pada titik yang lain sehingga didapatkan hasil seperti pada tabel 6 . Pada tabel 6 dapat dianalisa pada titik yang sama tetapi dengan kondisi yang berbeda yaitu dengan adanya pengaruh damping, bahwa nilai CCT yang didapatkan pada sistem yang menggunakan damping lebih lama dibandingkan dengan sistem yang tidak menggunakan damping.
V. KESIMPULAN
1. Metode Time domain Simulation hanya bisa digunakan dengan cara trial error. Mencoba dengan mengubah besarnya waktu stabil dengan waktu tidak stabil.
2. Nilai CCT semakin besar bila sistem memiliki damping. Sistem Jawa Bali tanpa menggunakan damping titik A 0.113 S -0.114 S, sedangkan yang menggunakan damping CCT titik A 0.173 S -0.174 S,
3. Sistem Tenaga listrik akan semakin stabil bila sistem mempunyai damping, dilihat dari semakin lamanya CCT pada sistem berdamping dibanding sistem tidak menggunakan damping.
DAFTARPUSTAKA
[1] Grainger, John J., dan Stevenson, William D Jr., “Power System Analysis,”Singapura, McGraw-Hill, Inc, 1994.
[2] Saadat, Hadi., “Power System Analysis,” Singapura, McGraw-Hill, Inc, 2004, edisi kedua.
[3] Zuhal, “Dasar Teknik Tenaga Listrik Dan Elektronika Daya,” Jakarta, PT Gramedia Pustaka Utama, 1995, edisi kelima.
[4] Kimbark, Edward Wilson.” Power System Stability : Synchronous Machines”. Dover Publications, Inc, new York. 1956.
[5] P. Kundur,” Power System Stability and Control,” McGraw Hill,1994. Tabel6.
Hasil perhitungan CCT Sistem 3 generator 9 bus
SISTEM 3 GENERATOR 9 BUS
TITIK GANGGUAN CCT WAKTU SIMULASI DAMPING TANPA DAMPING DAMPING TANPA DAMPING A 0.572-0.573 0.470-0.471 332.408 319.165 B 0.266-0.267 0.233-0.234 332.246 318.663 C 0.352-0.353 0.274-0.275 332.531 318.666 D 0.500-0.501 0.417-0.418 331.545 318.569 E 0.498-0.499 0.416-0.417 332.223 318.48 F 0.291-0.292 0.254-0.255 332.223 318.572 G 0.291-0.292 0.257-0.258 332.781 318.602 H 0.362-0.363 0.282-0.283 332.533 318.91 I 0.362-0.363 0.265-0.266 332.732 318.494