Abstrak — Pada sistem tenaga listrik, analisis kestabilan transien memiliki peranan penting dalam operasinya. Saat terjadi gangguan, sistem akan mengalami kondisi transien. Dalam kondisi tersebut, rele pengaman akan bekerja untuk membuka circuit breaker dalam kurun waktu tertentu. Akan tetapi hal ini tidak menjamin sistem akan kembali pada kondisi steady-state. Hal ini disebabkan adanya waktu pemutus kritis / critical clearing time (CCT) pada saat kondisi transien. Jika gangguan diputus kurang dari CCT, maka sistem akan kembali stabil. Namun, jika gangguan diputus lebih dari CCT, maka generator akan berada pada kondisi tidak stabil. Untuk menghitung CCT yang akurat dapat menggunakan metode time domain simulation, tetapi metode ini tidak dapat menghitung CCT secara langsung. Selain itu memerlukan waktu yang lama dalam proses perhitungannya. Dalam tugas akhir ini akan diusulkan sebuah metode yang dapat menghitung CCT secara langsung, cepat, dan akurat berdasarkan metode trajectory kritis menggunakan hilangnya sinkronisasi. Trajectory kritis didefinisikan sebagai lintasan yang berawal dari titik gangguan dan berakhir pada kondisi hilangnya sinkronisasi. Metode ini akan digunakan untuk menghitung CCT pada sistem 3 generator 9 bus.
Kata Kunci — Analisis Kestabilan Transien, Critical clearing Time (CCT), Trajectory kritis
I. PENDAHULUAN
Stabilitas sistem tenaga listrik telah dianggap sebagai masalah penting untuk memenuhi kebutuhan listrik yang sudah menjadi kebutuhan primer bagi manusia. Untuk mendapatkan sistem yang baik, tentunya terdapat beberapa kriteria, salah satunya adalah sistem tenaga tersebut mampu melayani beban secara kontinyu dimana tegangan dan frekuensi konstan. Fluktuasi tegangan dan frekuensi yang terjadi harus berada pada batas toleransi yang diizinkan agar peralatan listrik konsumen dapat bekerja dengan baik dan aman. Perubahan beban selalu terjadi dalam sistem, hal ini bisa terjadi akibat gangguan pada sistem tenaga listrik. Ganguan yang sering terjadi dalam sistem tenaga listrik adalah gangguan arus lebih yang terjadi akibat adanya hubung singkat arus listrik. Bila gangguan tidak dihilangkan dengan segera, maka percepatan atau perlambatan putaran rotor generator akan menyebabkan hilangnya sinkronisasi pada generator sinkron.
Untuk mencapai kestabilan setelah adanya gangguan, dibutuhkan suatu analisa kondisi transien untuk menentukan critical clearing time (CCT). Salah satu metode untuk
menentukan CCT pada permasalahan stabilitas sistem tenaga listrik adalah dengan menetukan critical trajectory (lintasan kritis) pada suatu sistem multi mesin [1]-[4]. Dalam menentukan CCT yang berdasarkan critical trajectory masih menggunakan integrasi numerikal dari persamaan diferensial nonlinear. Metode ini cukup akurat dalam perhitungan CCT suatu sistem tenaga multi mesin dan mampu memberikan gambaran tentang kestabilan sistem tenaga akibat gejala transien yang dialami. Namun, integrasi numerikal yang begitu panjang dalam proses perhitungan CCT menyebabkan metode ini memerlukan waktu yang tidak sedikit dalam proses iterasinya. Hal ini sangat tidak efektif jika diterapkan pada analisis kestabilan transien. Sebab, pola perubahan yang terjadi akibat gangguan-gangguan yang terjadi pada sistem sangat cepat. Oleh karena itu, diperlukan sebuah metode yang dapat menghitung CCT dengan iterasi yang lebih cepat dan akurat.
Sebuah metode yang akan diusulkan menggunakan critical trajectory. Dimana critical trajectory adalah trajectory yang dimulai saat terjadinya gangguan hingga mencapai kondisi kritis sebelum terjadinya lepas singkron. Dalam metode ini juga dilakukan modifikasi pada persamaan trapezoidal untuk proses integrasi numerikal. Dengan demikian, metode ini cukup akurat dalam perhitungan CCT. Sehingga critical trajectory dan CCT dapat dihitung secara bersamaan.
.
II. KESTABILAN TRANSIEN A. Definisi Kestabilan Transien
Kestabilan sistem tenaga listrik berdasar referensi [5] dapat dibagi menjadi menjadi tiga kategori, yaitu :
1. Kestabilan sudut rotor 2. Kestabilan tegangan 3. Kestabilan frekuensi
Kestabilan transien merupakan bagian dari kestabilan sudut rotor yang mempelajari mengenai kemampuan dari mesin-mesin sinkron yang saling terinterkoneksi pada sistem tenaga listrik untuk menjaga kesinkronan setelah mengalami gangguan besar seperti gangguan hubung singkat pada saluran transmisi pada sistem tenaga. Kestabilan tersebut tergantung pada kemampuan untuk menjaga atau mengembalikan keseimbangan antara torsi elektromekanik dan torsi mekanik dari masing-masing mesin sinkron. Periode waktu yang digunakan untuk studi kestabilan transien berkisar antaea 3-5
Perhitungan CCT (Critical Clearing Time) Berdasarkan
Trajectory Kritis Menggunakan Hilangnya Sinkronisasi
pada Sistem 3 Generator 9 Bus
Nurdiansyah Pujoyo, Dimas Anton Asfani, dan Ardyono Priyadi
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
detik setelah gangguan. Untuk sistem yang sangat besar ditambahkan 10-20 detik.
Gambar 1. Respon Sudut Rotor Terhadap Gangguan Transien[6].
Gambar 1 menunjukkan respon sudut rotor terhadap gangguan dengan kondisi stabil dan tidak stabil pada generator sinkron. Kondisi 1, sudut rotor bertambah hingga maksimum, akan tetapi kemudian berkurang dan berosilasi hingga pada kondisi steady-state. Kondisi 2 (frist swing instability), sudut rotor kehilangan sinkronisasi saat ayunan pertama ditandai dengan naiknya sudut rotor sehingga mencapai kondisi tidak stabil. Sedangkan pada kondisi 3 (multi swing instability), sistem mengalami osilasi yang semakin bertambah, sehingga mengakibatkan generator menjadi lepas sinkron [6].
B. Critical Trajectory
Critical Trajectory didefinisikan sebagai lintasan yang dimulai dari titik Fault-on Trajectory pada CCT dan mencapai titik kritis dimana sistem kehilangan sinkronisasi[7]. Hal ini digunakan Untuk meminimalisasi masalah yang terjadi pada perhitungan nilai UEP (Unstable Equlibrium Point) shingga didapatkan nilai CCT untuk mencapai kestabilan pada sistem tenaga listrik. 1 2 3 4 UEP (rad) (r ad )/s w d SEP
Gambar 2. Lintasan dalam setiap tahap pada sistem tenaga listrik satu generator terhubung ke bus infinite dengan peredam (Damping)[7].
Dalam paper ini akan diusulkan sebuah metode yang manggunakan critical trajectory dan gambar 2 merupakan contoh kasus pada sistem tenaga listrik satu generator yeng terhubung dengan infinite bus dengan peredam. Tiga jenis
lintasan ditunjukkan dalam gambar 2. Trajectory 1 adalah lintasan saat terjadi gangguan (fault-on trajectory) dimulai dari Stabil Equilibrium Point (SEP) hingga ganguan diputus. Trajectory 2 adalah lintasan saat dimana sistem sudah mencapai kestabilannnya karena gangguan dihilangkan sebelum waktu pemutus kritisnya (CCT). Trajectory 4 adalah lintasan saat tidak stabil, dimana waktu pemutusan gangguan terlalu lama. Trajectory 3 merupakan lintasan kritis untuk kestabilan sistem, dimana lintasan kritis ini akan dicari pada paper ini.
III. PERHITUNGANCRITICALCLEARINGTIME BERDASARKANHILANGNYASINKRONISASI A. Kondisi Awal
Perhitungan kestabilan transient dihitung dengan nilai awal (initial point) ketika dalam kondisi stabil didefinisikan sebagai xpre, ketika gangguan terjadi pada saat t=0. Kemudian sistem
diatur oleh persamaan dinamis ketika gangguan seperti berikut,
̇ ( ) ( ) (1)
Dimana
Hasil dari persamaan 1 adalah critical trajectory pada saat terjadi gangguan. Persamaan ini juga dapat ditulis sebagai,
( ) ( ) (2)
Dimana ( )
Gangguan dapat dihilangkan pada saat t=τ dan sistem diatur oleh persamaan dinamis seperti berikut,
̇ ( ) (3)
Hasil dari persamaan (3) adalah critical trajectory pada saat setelah terjadi gangguan. Persamaan ini juga dapat ditulis sebagai,
( ) ( ) ( ) (4) Sebagai catatan x0 adalah titik pada lintasan kritis saat gangguan (fault on trajectory) saat t=τ.
( ) (5)
B. Modifikasi Persamaan Trapezoidal
Perhitungan trapezoidal digunakan untuk persamaan (3) pada saat tk dinotasikan dengan xk, sehingga persamaan trapesoidal yang konvensional menjadi,
( ̇ ̇̇ )( ) (6)
Dimana,
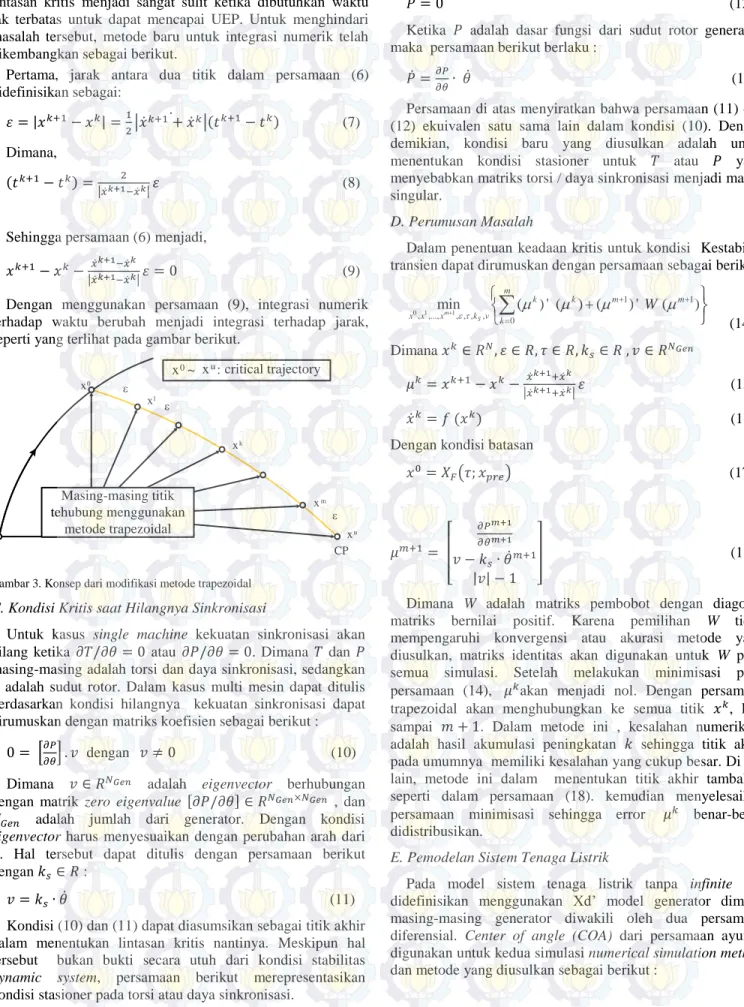
̇ ( ) Modifikasi persamaan trapezoidal menitikberatkan pada kondisi ketika gangguan dihilangkan pada saat CCT dan variabel yang konvergen ke titik kritis seperti yang dinyatakan sebelumnya. Dalam beberapa kasus tertentu, titik kritis sama dengan UEP (unstable equilibrium point) dan lintasan mencapai UEP dengan waktu tak terbatas. Gambar 3 menunjukkan lintasan kritis, dimana dua titik batas, x0 dan xu, merupakan titik awal di CCT dan titik kritis. Memperoleh kondisi 2 kondisi 3 kondisi 1 waktu (s) sudut rotor (δ)
lintasan kritis menjadi sangat sulit ketika dibutuhkan waktu tak terbatas untuk dapat mencapai UEP. Untuk menghindari masalah tersebut, metode baru untuk integrasi numerik telah dikembangkan sebagai berikut.
Pertama, jarak antara dua titik dalam persamaan (6) didefinisikan sebagai:
| | | ̇ ̇̇ |( ) (7)
Dimana, ( )
| ̇ ̇ | (8)
Sehingga persamaan (6) menjadi,
̇ ̇
| ̇ ̇ | (9) Dengan menggunakan persamaan (9), integrasi numerik terhadap waktu berubah menjadi integrasi terhadap jarak, seperti yang terlihat pada gambar berikut.
CP x0 xu xm x1 xk x0~ xu: critical trajectory Masing-masing titik tehubung menggunakan metode trapezoidal
Gambar 3. Konsep dari modifikasi metode trapezoidal
C. Kondisi Kritis saat Hilangnya Sinkronisasi
Untuk kasus single machine kekuatan sinkronisasi akan hilang ketika atau . Dimana dan masing-masing adalah torsi dan daya sinkronisasi, sedangkan adalah sudut rotor. Dalam kasus multi mesin dapat ditulis berdasarkan kondisi hilangnya kekuatan sinkronisasi dapat dirumuskan dengan matriks koefisien sebagai berikut :
[ ] dengan (10) Dimana adalah eigenvector berhubungan dengan matrik zero eigenvalue [ ] , dan
adalah jumlah dari generator. Dengan kondisi
eigenvector harus menyesuaikan dengan perubahan arah dari . Hal tersebut dapat ditulis dengan persamaan berikut dengan :
̇ (11)
Kondisi (10) dan (11) dapat diasumsikan sebagai titik akhir dalam menentukan lintasan kritis nantinya. Meskipun hal tersebut bukan bukti secara utuh dari kondisi stabilitas dynamic system, persamaan berikut merepresentasikan kondisi stasioner pada torsi atau daya sinkronisasi.
̇ (12)
Ketika adalah dasar fungsi dari sudut rotor generator, maka persamaan berikut berlaku :
̇ ̇ (13)
Persamaan di atas menyiratkan bahwa persamaan (11) dan (12) ekuivalen satu sama lain dalam kondisi (10). Dengan demikian, kondisi baru yang diusulkan adalah untuk menentukan kondisi stasioner untuk atau yang menyebabkan matriks torsi / daya sinkronisasi menjadi matrik singular.
D. Perumusan Masalah
Dalam penentuan keadaan kritis untuk kondisi Kestabilan transien dapat dirumuskan dengan persamaan sebagai berikut:
0 1 1 1 1 , ,..., , , , , 0 min ( ) ' ( ) ( ) ' ( ) m S m k k m m x x x k v k W
(14) Dimana ̇ ̇ | ̇ ̇ | (15) ̇ ( ) (16)Dengan kondisi batasan
( ) (17) [ ̇ | | ] (18)
Dimana W adalah matriks pembobot dengan diagonal matriks bernilai positif. Karena pemilihan W tidak mempengaruhi konvergensi atau akurasi metode yang diusulkan, matriks identitas akan digunakan untuk W pada semua simulasi. Setelah melakukan minimisasi pada persamaan (14), akan menjadi nol. Dengan persamaan trapezoidal akan menghubungkan ke semua titik , k=0 sampai . Dalam metode ini , kesalahan numerik adalah hasil akumulasi peningkatan sehingga titik akhir pada umumnya memiliki kesalahan yang cukup besar. Di sisi lain, metode ini dalam menentukan titik akhir tambahan seperti dalam persamaan (18). kemudian menyelesaikan persamaan minimisasi sehingga error benar-benar didistribusikan.
E. Pemodelan Sistem Tenaga Listrik
Pada model sistem tenaga listrik tanpa infinite bus didefinisikan menggunakan Xd’ model generator dimana masing-masing generator diwakili oleh dua persamaan diferensial. Center of angle (COA) dari persamaan ayunan digunakan untuk kedua simulasi numerical simulation method dan metode yang diusulkan sebagai berikut :
~
~
G3 G1 G2 1 4 5 6 2 7 8 9 3 A G F I H C E D~
B 0 0.5 1 1.5 2 2.5 3 -10 0 10 20 30 40 50 60 70 80 t [s] de lta [ ra d]
( ) i i i mi ei COA i i T M M P P P D M w w (19) i i w
(20) Dimana, 0 0 1 1 1 1 1 ; ; ; n n n T i i i i i i T i T i M M M M M M w w d d
0 0 1 ; ; ; n i i i i COA mi ei i P P P d d w w w
sin
i n e ij i j i j ij j i P
Y E E
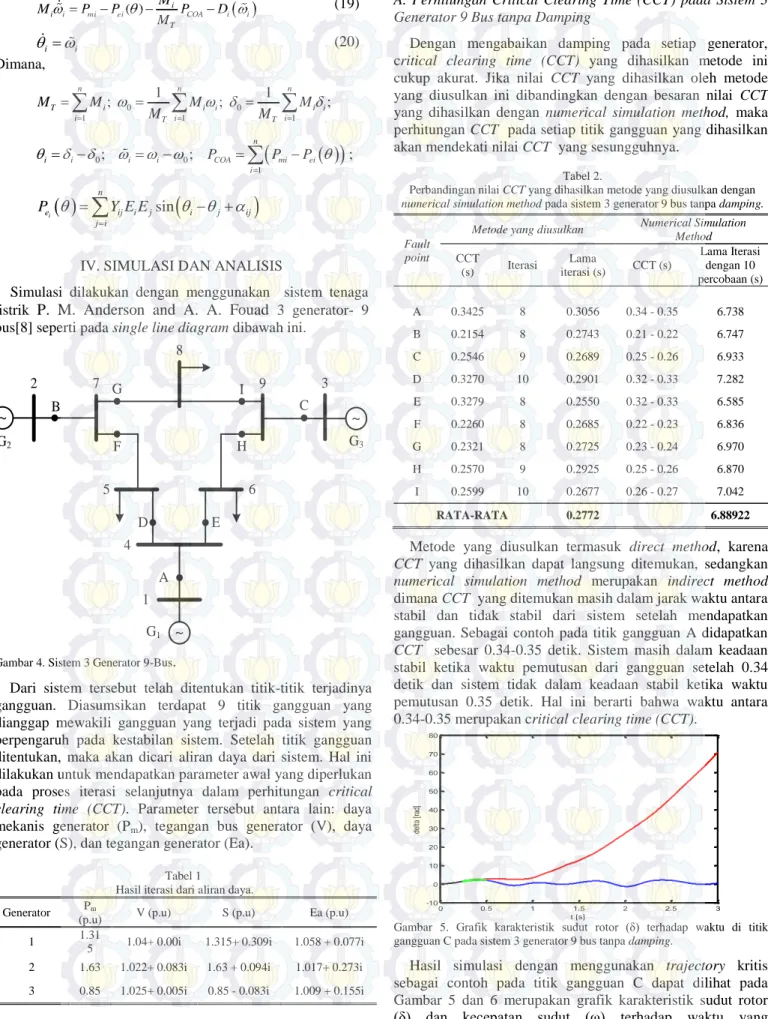
IV. SIMULASI DAN ANALISIS
Simulasi dilakukan dengan menggunakan sistem tenaga listrik P. M. Anderson and A. A. Fouad 3 generator- 9 bus[8] seperti pada single line diagram dibawah ini.
Gambar 4. Sistem 3 Generator 9-Bus.
Dari sistem tersebut telah ditentukan titik-titik terjadinya gangguan. Diasumsikan terdapat 9 titik gangguan yang dianggap mewakili gangguan yang terjadi pada sistem yang berpengaruh pada kestabilan sistem. Setelah titik gangguan ditentukan, maka akan dicari aliran daya dari sistem. Hal ini dilakukan untuk mendapatkan parameter awal yang diperlukan pada proses iterasi selanjutnya dalam perhitungan critical clearing time (CCT). Parameter tersebut antara lain: daya mekanis generator (Pm), tegangan bus generator (V), daya generator (S), dan tegangan generator (Ea).
Tabel 1
Hasil iterasi dari aliran daya. Generator Pm
(p.u) V (p.u) S (p.u) Ea (p.u) 1 1.31
5 1.04+ 0.00i 1.315+ 0.309i 1.058 + 0.077i 2 1.63 1.022+ 0.083i 1.63 + 0.094i 1.017+ 0.273i 3 0.85 1.025+ 0.005i 0.85 - 0.083i 1.009 + 0.155i
A. Perhitungan Critical Clearing Time (CCT) pada Sistem 3 Generator 9 Bus tanpa Damping
Dengan mengabaikan damping pada setiap generator, critical clearing time (CCT) yang dihasilkan metode ini cukup akurat. Jika nilai CCT yang dihasilkan oleh metode yang diusulkan ini dibandingkan dengan besaran nilai CCT yang dihasilkan dengan numerical simulation method, maka perhitungan CCT pada setiap titik gangguan yang dihasilkan akan mendekati nilai CCT yang sesungguhnya.
Tabel 2.
Perbandingan nilai CCT yang dihasilkan metode yang diusulkan dengan
numerical simulation method pada sistem 3 generator 9 bus tanpa damping.
Fault point
Metode yang diusulkan Numerical Simulation Method CCT (s) Iterasi Lama iterasi (s) CCT (s) Lama Iterasi dengan 10 percobaan (s) A 0.3425 8 0.3056 0.34 - 0.35 6.738 B 0.2154 8 0.2743 0.21 - 0.22 6.747 C 0.2546 9 0.2689 0.25 - 0.26 6.933 D 0.3270 10 0.2901 0.32 - 0.33 7.282 E 0.3279 8 0.2550 0.32 - 0.33 6.585 F 0.2260 8 0.2685 0.22 - 0.23 6.836 G 0.2321 8 0.2725 0.23 - 0.24 6.970 H 0.2570 9 0.2925 0.25 - 0.26 6.870 I 0.2599 10 0.2677 0.26 - 0.27 7.042 RATA-RATA 0.2772 6.88922
Metode yang diusulkan termasuk direct method, karena CCT yang dihasilkan dapat langsung ditemukan, sedangkan numerical simulation method merupakan indirect method dimana CCT yang ditemukan masih dalam jarak waktu antara stabil dan tidak stabil dari sistem setelah mendapatkan gangguan. Sebagai contoh pada titik gangguan A didapatkan CCT sebesar 0.34-0.35 detik. Sistem masih dalam keadaan stabil ketika waktu pemutusan dari gangguan setelah 0.34 detik dan sistem tidak dalam keadaan stabil ketika waktu pemutusan 0.35 detik. Hal ini berarti bahwa waktu antara 0.34-0.35 merupakan critical clearing time (CCT).
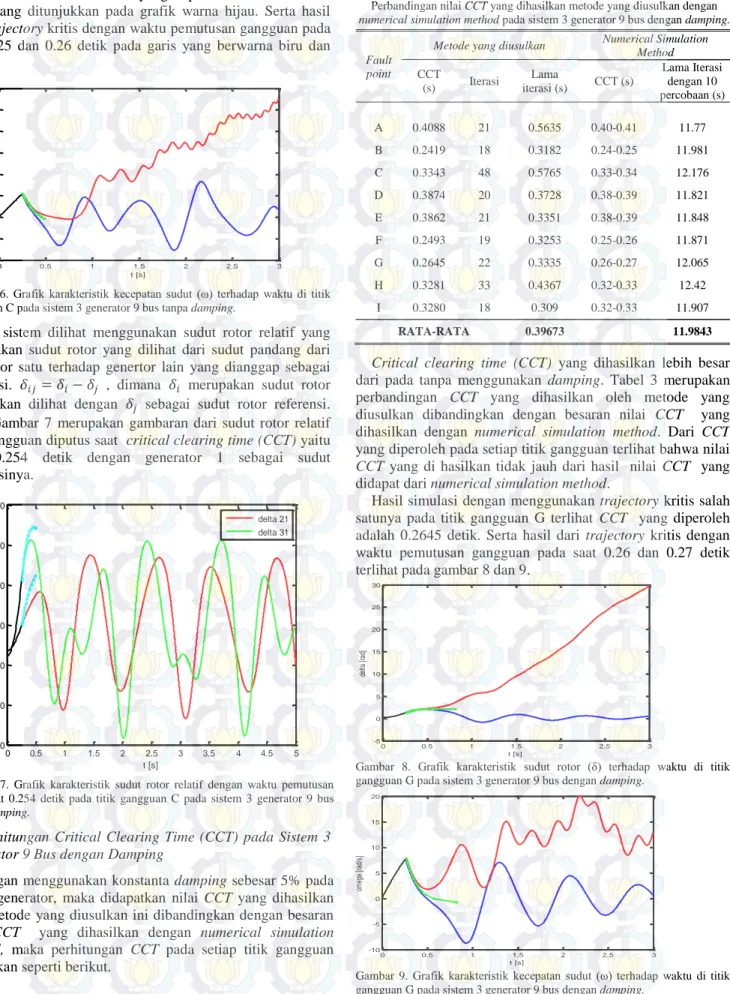
Gambar 5. Grafik karakteristik sudut rotor (δ) terhadap waktu di titik gangguan C pada sistem 3 generator 9 bus tanpa damping.
Hasil simulasi dengan menggunakan trajectory kritis sebagai contoh pada titik gangguan C dapat dilihat pada Gambar 5 dan 6 merupakan grafik karakteristik sudut rotor (δ) dan kecepatan sudut (ω) terhadap waktu yang
0 0.5 1 1.5 2 2.5 3 -20 -10 0 10 20 30 40 50 60 t [s] om eg a [r ad /s ]
menunjukkan bahwa CCT yang diperoleh adalah 0.2546 detik yang ditunjukkan pada grafik warna hijau. Serta hasil dari trajectory kritis dengan waktu pemutusan gangguan pada saat 0.25 dan 0.26 detik pada garis yang berwarna biru dan merah.
Gambar 6. Grafik karakteristik kecepatan sudut (ω) terhadap waktu di titik gangguan C pada sistem 3 generator 9 bus tanpa damping.
Jika sistem dilihat menggunakan sudut rotor relatif yang merupakan sudut rotor yang dilihat dari sudut pandang dari generator satu terhadap genertor lain yang dianggap sebagai referensi. , dimana merupakan sudut rotor
yang akan dilihat dengan sebagai sudut rotor referensi. Pada Gambar 7 merupakan gambaran dari sudut rotor relatif saat gangguan diputus saat critical clearing time (CCT) yaitu saat 0.254 detik dengan generator 1 sebagai sudut referensinya.
Gambar 7. Grafik karakteristik sudut rotor relatif dengan waktu pemutusan kritis saat 0.254 detik pada titik gangguan C pada sistem 3 generator 9 bus tanpa damping.
B. Perhitungan Critical Clearing Time (CCT) pada Sistem 3 Generator 9 Bus dengan Damping
Dengan menggunakan konstanta damping sebesar 5% pada setiap generator, maka didapatkan nilai CCT yang dihasilkan oleh metode yang diusulkan ini dibandingkan dengan besaran nilai CCT yang dihasilkan dengan numerical simulation method, maka perhitungan CCT pada setiap titik gangguan dihasilkan seperti berikut.
Tabel 3.
Perbandingan nilai CCT yang dihasilkan metode yang diusulkan dengan
numerical simulation method pada sistem 3 generator 9 bus dengan damping.
Fault point
Metode yang diusulkan Numerical Simulation Method CCT (s) Iterasi Lama iterasi (s) CCT (s) Lama Iterasi dengan 10 percobaan (s) A 0.4088 21 0.5635 0.40-0.41 11.77 B 0.2419 18 0.3182 0.24-0.25 11.981 C 0.3343 48 0.5765 0.33-0.34 12.176 D 0.3874 20 0.3728 0.38-0.39 11.821 E 0.3862 21 0.3351 0.38-0.39 11.848 F 0.2493 19 0.3253 0.25-0.26 11.871 G 0.2645 22 0.3335 0.26-0.27 12.065 H 0.3281 33 0.4367 0.32-0.33 12.42 I 0.3280 18 0.309 0.32-0.33 11.907 RATA-RATA 0.39673 11.9843
Critical clearing time (CCT) yang dihasilkan lebih besar dari pada tanpa menggunakan damping. Tabel 3 merupakan perbandingan CCT yang dihasilkan oleh metode yang diusulkan dibandingkan dengan besaran nilai CCT yang dihasilkan dengan numerical simulation method. Dari CCT yang diperoleh pada setiap titik gangguan terlihat bahwa nilai CCT yang di hasilkan tidak jauh dari hasil nilai CCT yang didapat dari numerical simulation method.
Hasil simulasi dengan menggunakan trajectory kritis salah satunya pada titik gangguan G terlihat CCT yang diperoleh adalah 0.2645 detik. Serta hasil dari trajectory kritis dengan waktu pemutusan gangguan pada saat 0.26 dan 0.27 detik terlihat pada gambar 8 dan 9.
Gambar 8. Grafik karakteristik sudut rotor (δ) terhadap waktu di titik gangguan G pada sistem 3 generator 9 bus dengan damping.
Gambar 9. Grafik karakteristik kecepatan sudut (ω) terhadap waktu di titik gangguan G pada sistem 3 generator 9 bus dengan damping.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -100 -50 0 50 100 150 200 t [s] d e lt a [ d e ra ja t] delta 21 delta 31 0 0.5 1 1.5 2 2.5 3 -5 0 5 10 15 20 25 30 t [s] de lta [r ad ] 0 0.5 1 1.5 2 2.5 3 -10 -5 0 5 10 15 20 t [s] om eg a [ra d/ s]
Gambar 10. Grafik karakteristik sudut rotor relatif dengan waktu pemutusan kritis saat 0.264 detik pada titik gangguan C pada sistem 3 generator 9 bus tanpa damping.
Gambar 10 merupakan hasil simulasi sudut rotor relatif saat gangguan G diputus saat 0.264 detik sebagai critical clearing time (CCT) dengan generator 1 sebagai sudut referensinya.
V. KESIMPULAN
Metode perhitungan critical clearing time (CCT) berdasar trajectory kritis menggunakan hilangnya sinkronisasi pada sistem 3 generator 9 bus sudah mampu memberikan penilaian sebuah kestabilan transien dengan mempresentasikan hasil CCT pada sebuah sistem multi mesin dengan hasil CCT diperoleh secara langsung tanpa ada batasan dari CCT yang ditemukan seperti pada numerical simulation method. Hasil CCT sudah terbukti tepat jika dibandingkan dengan numerical simulation method dengan perbedaan hasil tidak kurang dari 0.01 detik serta tidak memerlukan waktu yang cukup lama seperti pada numerical simulation method yang telah ada dengan selisih waktu rata-rata 6.612 detik lebih cepat untuk sistem 3 generator 9-bus tanpa damping dan dengan selisih waktu rata-rata 11.5876 detik lebih cepat untuk sistem 3 generator 9-bus dengan damping.
V. DAFTAR PUSTAKA
[1] Priyadi Ardyono, N. Yorino, dan Mauridhi H. P. "Critical trajectory for
Transient Stbility Analysis". Institut Teknologi Sepuluh Nopember,
Surabaya. 2012
[2] Yorino, Naoto, Ardyono Priyadi, Hironori Kakui, dan Mitsuhiro Takeshita. A New Method for Obtaining Critical Clearing Time for
Transient Stability. IEEE Transactions on Power Systems, Vol. 25, No.
3, August 2010.
[3] A. Priyadi, N. Yorino, M. Tanaka, T. Fujiwara, Y. Zoka, H. Kakui, and M. Takeshita, “A Direct Method for Obtaining Critical Clearing Time for Transient Stability Using Critical Generator Conditions,” European Transactions on Electrical Power, Vol. 22, no. 5, pp. 674-687, June 2012.
[4] A. Priyadi, N. Yorino, Y. Sasaki, M. Tanaka, T. Fujiwara, Y. Zoka, H.
Kakui, and M. Takeshita, “Comparison of Critical Trajectory Methods for Direct Method for Transient Stability,” IEEJ Transactions on Power and Energy, vol. 130, no. 10, pp. 870-876, October 2010. [5] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions,
“Definition and Classification of Power System Stability,” IEEE
Transaction on Power System, Vol.19, No.2, May. 2004.
[6] Grainger, Jhon. J dan William D. Stevenson, JR, Power System Analysis. New York: McGraw-Hill, Inc,
[7] N. Yorino, A. Priyadi, Y. Zoka. "A Method for Transient Stability
Assessment Based on Critical Trajectory". Proc. on The International
Symposium on Sustainable Energy (ISSE), Tokyo, Japan. 2007. [8] Anderson, P. M. dan A. A. Fouad, Power System Control and Stability.
United States: A John Wlley &Sons, Inc, 2003.
RIWAYAT HIDUP
Nurdiansyah Pujoyo adalah nama lengkap penulis. Penulis lahir di Bojonegoro pada tanggal 1 Januari 1991 yang merupakan anak pertama dari tiga bersaudara pasangan Jaswadi (alm.) dan Sri Andajani. Penulis yang memiliki kegemaran dalam berolahraga ini melanjutkan studi di Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nompeber Surabaya melalui jalur SNMPTN pada tahun 2009. Konsentrasi penulis adalah pada bidang studi Teknik Sistem Tenaga dan selama masa perkuliahan, penulis aktif menjadi asisten laboratorium Instrumentasi, Pengukuran, dan Identifikasi Sistem Tenaga (IPIST) Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember Surabaya. Penulis dapat dihubungi melalui email : [email protected]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -50 0 50 100 150 200 t [s] d e lt a [ d e ra ja t] delta 21 delta 31
![Gambar 1. Respon Sudut Rotor Terhadap Gangguan Transien[6].](https://thumb-ap.123doks.com/thumbv2/123dok/4503636.3259605/2.918.79.788.93.1100/gambar-respon-sudut-rotor-gangguan-transien.webp)